
text
stringlengths 96
319k
| id
stringlengths 14
178
| metadata
dict |
|---|---|---|
import { base } from "$app/paths";
import { collections } from "$lib/server/database";
import { redirect } from "@sveltejs/kit";
import { ObjectId } from "mongodb";
import { authCondition } from "$lib/server/auth.js";
export async function load({ params, locals }) {
try {
const assistant = await collections.assistants.findOne({
_id: new ObjectId(params.assistantId),
});
if (!assistant) {
redirect(302, `${base}`);
}
if (locals.user?._id ?? locals.sessionId) {
await collections.settings.updateOne(
authCondition(locals),
{
$set: {
activeModel: assistant._id.toString(),
updatedAt: new Date(),
},
$push: { assistants: assistant._id },
$setOnInsert: {
createdAt: new Date(),
},
},
{
upsert: true,
}
);
}
return {
assistant: JSON.parse(JSON.stringify(assistant)),
};
} catch {
redirect(302, `${base}`);
}
}
| chat-ui/src/routes/assistant/[assistantId]/+page.server.ts/0 | {
"file_path": "chat-ui/src/routes/assistant/[assistantId]/+page.server.ts",
"repo_id": "chat-ui",
"token_count": 382
} |
<script lang="ts">
import { page } from "$app/state";
import { base } from "$app/paths";
import { env as envPublic } from "$env/dynamic/public";
import type { BackendModel } from "$lib/server/models";
import { useSettingsStore } from "$lib/stores/settings";
import CopyToClipBoardBtn from "$lib/components/CopyToClipBoardBtn.svelte";
import TokensCounter from "$lib/components/TokensCounter.svelte";
import CarbonArrowUpRight from "~icons/carbon/arrow-up-right";
import CarbonLink from "~icons/carbon/link";
import CarbonChat from "~icons/carbon/chat";
import CarbonCode from "~icons/carbon/code";
import { goto } from "$app/navigation";
const settings = useSettingsStore();
$effect(() => {
if ($settings.customPrompts[page.params.model] === undefined) {
$settings.customPrompts = {
...$settings.customPrompts,
[page.params.model]:
page.data.models.find((el: BackendModel) => el.id === page.params.model)?.preprompt || "",
};
}
});
let hasCustomPreprompt = $derived(
$settings.customPrompts[page.params.model] !==
page.data.models.find((el: BackendModel) => el.id === page.params.model)?.preprompt
);
let model = $derived(page.data.models.find((el: BackendModel) => el.id === page.params.model));
</script>
<div class="flex flex-col items-start">
<div class="mb-5 flex flex-col gap-1.5">
<h2 class="text-lg font-semibold md:text-xl">
{page.params.model}
</h2>
{#if model.description}
<p class="whitespace-pre-wrap text-gray-600">
{model.description}
</p>
{/if}
</div>
<div class="flex flex-wrap items-center gap-2 md:gap-4">
{#if model.modelUrl}
<a
href={model.modelUrl || "https://huggingface.co/" + model.name}
target="_blank"
rel="noreferrer"
class="flex items-center truncate underline underline-offset-2"
>
<CarbonArrowUpRight class="mr-1.5 shrink-0 text-xs " />
Model page
</a>
{/if}
{#if model.datasetName || model.datasetUrl}
<a
href={model.datasetUrl || "https://huggingface.co/datasets/" + model.datasetName}
target="_blank"
rel="noreferrer"
class="flex items-center truncate underline underline-offset-2"
>
<CarbonArrowUpRight class="mr-1.5 shrink-0 text-xs " />
Dataset page
</a>
{/if}
{#if model.websiteUrl}
<a
href={model.websiteUrl}
target="_blank"
class="flex items-center truncate underline underline-offset-2"
rel="noreferrer"
>
<CarbonArrowUpRight class="mr-1.5 shrink-0 text-xs " />
Model website
</a>
{/if}
{#if model.hasInferenceAPI}
<a
href={"https://huggingface.co/playground?modelId=" + model.name}
target="_blank"
rel="noreferrer"
class="flex items-center truncate underline underline-offset-2"
>
<CarbonCode class="mr-1.5 shrink-0 text-xs " />
API Playground
</a>
{/if}
<CopyToClipBoardBtn
value="{envPublic.PUBLIC_ORIGIN || page.url.origin}{base}/models/{model.id}"
classNames="!border-none !shadow-none !py-0 !px-1 !rounded-md"
>
<div class="flex items-center gap-1.5 hover:underline">
<CarbonLink />Copy direct link to model
</div>
</CopyToClipBoardBtn>
</div>
<button
class="my-2 flex w-fit items-center rounded-full bg-black px-3 py-1 text-base !text-white"
name="Activate model"
onclick={(e) => {
e.stopPropagation();
settings.instantSet({
activeModel: page.params.model,
});
goto(`${base}/`);
}}
>
<CarbonChat class="mr-1.5 text-sm" />
New chat
</button>
<div class="relative flex w-full flex-col gap-2">
<div class="flex w-full flex-row content-between">
<h3 class="mb-1.5 text-lg font-semibold text-gray-800">System Prompt</h3>
{#if hasCustomPreprompt}
<button
class="ml-auto underline decoration-gray-300 hover:decoration-gray-700"
onclick={(e) => {
e.stopPropagation();
$settings.customPrompts[page.params.model] = model.preprompt;
}}
>
Reset
</button>
{/if}
</div>
<textarea
aria-label="Custom system prompt"
rows="10"
class="w-full resize-none rounded-md border-2 bg-gray-100 p-2"
bind:value={$settings.customPrompts[page.params.model]}
></textarea>
{#if model.tokenizer && $settings.customPrompts[page.params.model]}
<TokensCounter
classNames="absolute bottom-2 right-2"
prompt={$settings.customPrompts[page.params.model]}
modelTokenizer={model.tokenizer}
truncate={model?.parameters?.truncate}
/>
{/if}
</div>
</div>
| chat-ui/src/routes/settings/(nav)/[...model]/+page.svelte/0 | {
"file_path": "chat-ui/src/routes/settings/(nav)/[...model]/+page.svelte",
"repo_id": "chat-ui",
"token_count": 1881
} |
<script lang="ts">
import { createBubbler } from "svelte/legacy";
const bubble = createBubbler();
import type { PageData } from "./$types";
import { isHuggingChat } from "$lib/utils/isHuggingChat";
import { goto } from "$app/navigation";
import { base } from "$app/paths";
import { page } from "$app/state";
import CarbonAdd from "~icons/carbon/add";
import CarbonHelpFilled from "~icons/carbon/help-filled";
import CarbonClose from "~icons/carbon/close";
import CarbonArrowUpRight from "~icons/carbon/arrow-up-right";
import CarbonEarthAmerica from "~icons/carbon/earth-americas-filled";
import CarbonSearch from "~icons/carbon/search";
import Pagination from "$lib/components/Pagination.svelte";
import { getHref } from "$lib/utils/getHref";
import { debounce } from "$lib/utils/debounce";
import { isDesktop } from "$lib/utils/isDesktop";
import { SortKey } from "$lib/types/Assistant";
import ToolLogo from "$lib/components/ToolLogo.svelte";
import { ReviewStatus } from "$lib/types/Review";
import { useSettingsStore } from "$lib/stores/settings";
import { loginModalOpen } from "$lib/stores/loginModal";
interface Props {
data: PageData;
}
let { data }: Props = $props();
const settings = useSettingsStore();
const SEARCH_DEBOUNCE_DELAY = 400;
let filterInputEl: HTMLInputElement | undefined = $state();
let filterValue = $state(data.query);
let isFilterInPorgress = false;
let sortValue = $state(data.sort as SortKey);
let showUnfeatured = $state(data.showUnfeatured);
const resetFilter = () => {
filterValue = "";
isFilterInPorgress = false;
};
const filterOnName = debounce(async (value: string) => {
filterValue = value;
if (isFilterInPorgress) {
return;
}
isFilterInPorgress = true;
const newUrl = getHref(page.url, {
newKeys: { q: value },
existingKeys: { behaviour: "delete", keys: ["p"] },
});
await goto(newUrl);
if (isDesktop(window)) {
setTimeout(() => filterInputEl?.focus(), 0);
}
isFilterInPorgress = false;
// there was a new filter query before server returned response
if (filterValue !== value) {
filterOnName(filterValue);
}
}, SEARCH_DEBOUNCE_DELAY);
const sortTools = () => {
const newUrl = getHref(page.url, {
newKeys: { sort: sortValue },
existingKeys: { behaviour: "delete", keys: ["p"] },
});
goto(newUrl);
};
const toggleShowUnfeatured = () => {
showUnfeatured = !showUnfeatured;
const newUrl = getHref(page.url, {
newKeys: { showUnfeatured: showUnfeatured ? "true" : undefined },
existingKeys: { behaviour: "delete", keys: [] },
});
goto(newUrl);
};
const goToActiveUrl = () => {
return getHref(page.url, {
newKeys: { active: "true" },
existingKeys: { behaviour: "delete_except", keys: ["active", "sort"] },
});
};
const goToCommunity = () => {
return getHref(page.url, {
existingKeys: { behaviour: "delete_except", keys: ["sort", "q"] },
});
};
let activeOnly = $derived(page.url.searchParams.get("active") === "true");
let tools = $derived(
data.tools.filter((t) =>
activeOnly ? data.settings.tools.some((toolId) => toolId === t._id.toString()) : true
)
);
let toolsCreator = $derived(page.url.searchParams.get("user"));
let createdByMe = $derived(data.user?.username && data.user.username === toolsCreator);
let currentModelSupportTools = $derived(
data.models.find((m) => m.id === $settings.activeModel)?.tools ?? false
);
</script>
<div class="scrollbar-custom h-full overflow-y-auto py-12 max-sm:pt-8 md:py-24">
<div class="pt-42 mx-auto flex flex-col px-5 xl:w-[60rem] 2xl:w-[64rem]">
<div class="flex items-center">
<h1 class="text-2xl font-bold">Tools</h1>
{#if isHuggingChat}
<div class="5 ml-1.5 rounded-lg text-xxs uppercase text-gray-500 dark:text-gray-500">
beta
</div>
<a
href="https://huggingface.co/spaces/huggingchat/chat-ui/discussions/357"
class="ml-auto dark:text-gray-400 dark:hover:text-gray-300"
target="_blank"
aria-label="Hub discussion about tools"
>
<CarbonHelpFilled />
</a>
{/if}
</div>
<h2 class="text-gray-500">Popular tools made by the community</h2>
<h3 class="mt-2 w-fit text-purple-700 dark:text-purple-300">
This feature is <span
class="rounded-lg bg-purple-100 px-2 py-1 font-semibold dark:bg-purple-800/50"
>experimental</span
>. Consider
<a
class="underline hover:text-purple-500"
href="https://huggingface.co/spaces/huggingchat/chat-ui/discussions/569"
target="_blank">sharing your feedback with us!</a
>
</h3>
<div class="ml-auto mt-6 flex justify-between gap-2 max-sm:flex-col sm:items-center">
{#if data.user?.isAdmin}
<label class="mr-auto flex items-center gap-1 text-red-500" title="Admin only feature">
<input type="checkbox" checked={showUnfeatured} onchange={toggleShowUnfeatured} />
Show unfeatured tools
</label>
{/if}
{#if page.data.loginRequired && !data.user}
<button
onclick={() => {
$loginModalOpen = true;
}}
class="flex items-center gap-1 whitespace-nowrap rounded-lg border bg-white py-1 pl-1.5 pr-2.5 shadow-sm hover:bg-gray-50 hover:shadow-none dark:border-gray-600 dark:bg-gray-700 dark:hover:bg-gray-700"
>
<CarbonAdd />Create new tool
</button>
{:else}
<a
href={`${base}/tools/new`}
class="flex items-center gap-1 whitespace-nowrap rounded-lg border bg-white py-1 pl-1.5 pr-2.5 shadow-sm hover:bg-gray-50 hover:shadow-none dark:border-gray-600 dark:bg-gray-700 dark:hover:bg-gray-700"
>
<CarbonAdd />Create new tool
</a>
{/if}
</div>
<div class="mb-4 mt-7 flex flex-wrap items-center gap-x-2 gap-y-3 text-sm">
{#if toolsCreator && !createdByMe}
<div
class="flex items-center gap-1.5 rounded-full border border-gray-300 bg-gray-50 px-3 py-1 dark:border-gray-600 dark:bg-gray-700 dark:text-white"
>
{toolsCreator}'s tools
<a
href={getHref(page.url, {
existingKeys: { behaviour: "delete", keys: ["user", "modelId", "p", "q"] },
})}
onclick={resetFilter}
class="group"
><CarbonClose
class="text-xs group-hover:text-gray-800 dark:group-hover:text-gray-300"
/></a
>
</div>
{#if isHuggingChat}
<a
href="https://hf.co/{toolsCreator}"
target="_blank"
class="ml-auto flex items-center text-xs text-gray-500 underline hover:text-gray-800 dark:text-gray-400 dark:hover:text-gray-300"
><CarbonArrowUpRight class="mr-1 flex-none text-[0.58rem]" target="_blank" />View {toolsCreator}
on HF</a
>
{/if}
{:else}
<a
href={goToActiveUrl()}
class="flex items-center gap-1.5 rounded-full border px-3 py-1 {activeOnly
? 'border-gray-300 bg-gray-50 dark:border-gray-600 dark:bg-gray-700 dark:text-white'
: 'border-transparent text-gray-400 hover:text-gray-800 dark:hover:text-gray-300'}"
>
<CarbonEarthAmerica class="text-xs" />
Active ({page.data.settings?.tools?.length})
</a>
<a
href={goToCommunity()}
class="flex items-center gap-1.5 rounded-full border px-3 py-1 {!activeOnly &&
!toolsCreator
? 'border-gray-300 bg-gray-50 dark:border-gray-600 dark:bg-gray-700 dark:text-white'
: 'border-transparent text-gray-400 hover:text-gray-800 dark:hover:text-gray-300'}"
>
<CarbonEarthAmerica class="text-xs" />
Community
</a>
{#if data.user?.username}
<a
href={getHref(page.url, {
newKeys: { user: data.user.username },
existingKeys: { behaviour: "delete", keys: ["modelId", "p", "q", "active"] },
})}
onclick={resetFilter}
class="flex items-center gap-1.5 truncate rounded-full border px-3 py-1 {toolsCreator &&
createdByMe
? 'border-gray-300 bg-gray-50 dark:border-gray-600 dark:bg-gray-700 dark:text-white'
: 'border-transparent text-gray-400 hover:text-gray-800 dark:hover:text-gray-300'}"
>{data.user.username}
</a>
{/if}
{/if}
<div
class="relative ml-auto flex h-[30px] w-40 items-center rounded-full border px-2 has-[:focus]:border-gray-400 dark:border-gray-600 sm:w-64"
>
<CarbonSearch class="pointer-events-none absolute left-2 text-xs text-gray-400" />
<input
class="h-[30px] w-full bg-transparent pl-5 focus:outline-none"
placeholder="Filter by name"
value={filterValue}
oninput={(e) => filterOnName(e.currentTarget.value)}
bind:this={filterInputEl}
maxlength="150"
type="search"
aria-label="Filter tools by name"
/>
</div>
<select
bind:value={sortValue}
onchange={sortTools}
class="rounded-lg border border-gray-300 bg-gray-50 px-2 py-1 text-sm text-gray-900 focus:border-blue-700 focus:ring-blue-700 dark:border-gray-600 dark:bg-gray-700 dark:text-white dark:placeholder-gray-400"
aria-label="Sort tools"
>
<option value={SortKey.TRENDING}>{SortKey.TRENDING}</option>
<option value={SortKey.POPULAR}>{SortKey.POPULAR}</option>
</select>
</div>
{#if !currentModelSupportTools}
<div class="mx-auto text-center text-sm text-purple-700 dark:text-purple-300">
You are currently not using a model that supports tools. Activate one
<a href="{base}/models" class="underline">here</a>.
</div>
{/if}
<div class="mt-4 grid grid-cols-1 gap-3 sm:gap-5 lg:grid-cols-2">
{#each tools as tool}
{@const isActive = (page.data.settings?.tools ?? []).includes(tool._id.toString())}
{@const isOfficial = !tool.createdByName}
<div
onclick={() => goto(`${base}/tools/${tool._id.toString()}`)}
onkeydown={(e) => e.key === "Enter" && goto(`${base}/tools/${tool._id.toString()}`)}
role="button"
tabindex="0"
class="relative flex flex-row items-center gap-4 overflow-hidden text-balance rounded-xl border bg-gray-50/50 px-4 text-center shadow hover:bg-gray-50 hover:shadow-inner dark:bg-gray-950/20 dark:hover:bg-gray-950/40 max-sm:px-4 sm:h-24 {!(
tool.review === ReviewStatus.APPROVED
) && !isOfficial
? ' border-red-500/30'
: 'dark:border-gray-800/70'}"
class:!border-blue-600={isActive}
>
{#key tool.color + tool.icon}
<ToolLogo color={tool.color} icon={tool.icon} />
{/key}
<div class="flex h-full w-full flex-col items-start py-2 text-left">
<span class="font-bold">
<span class="w-full overflow-clip">
{tool.displayName}
</span>
{#if isActive}
<span
class="mx-1.5 inline-flex items-center rounded-full bg-blue-600 px-2 py-0.5 text-xs font-semibold text-white"
>Active</span
>
{/if}
</span>
<span class="line-clamp-1 font-mono text-xs text-gray-400">
{tool.baseUrl ?? "Internal tool"}
</span>
<p class=" line-clamp-1 w-full text-sm text-gray-600 dark:text-gray-300">
{tool.description}
</p>
{#if !isOfficial}
<p class="mt-auto text-xs text-gray-400 dark:text-gray-500">
Added by <a
class="hover:underline"
href="{base}/tools?user={tool.createdByName}"
onclick={(e) => {
e.stopPropagation();
bubble("click");
}}
>
{tool.createdByName}
</a>
<span class="text-gray-300">•</span>
{#if tool.useCount === 1}
1 run
{:else}
{tool.useCount} runs
{/if}
</p>
{:else}
<p class="mt-auto text-xs text-purple-700 dark:text-purple-400">
HuggingChat official tool
</p>
{/if}
</div>
</div>
{:else}
{#if activeOnly}
You don't have any active tools.
{:else}
No tools found
{/if}
{/each}
</div>
<Pagination
classNames="w-full flex justify-center mt-14 mb-4"
numItemsPerPage={data.numItemsPerPage}
numTotalItems={data.numTotalItems}
/>
</div>
</div>
| chat-ui/src/routes/tools/+page.svelte/0 | {
"file_path": "chat-ui/src/routes/tools/+page.svelte",
"repo_id": "chat-ui",
"token_count": 5177
} |
{
"$schema": "https://vega.github.io/schema/vega-lite/v4.json",
"data": {
"values": "<DVC_METRIC_DATA>"
},
"title": "<DVC_METRIC_TITLE>",
"mark": {
"type": "line"
},
"encoding": {
"x": {
"field": "<DVC_METRIC_X>",
"type": "quantitative",
"title": "<DVC_METRIC_X_LABEL>"
},
"y": {
"field": "<DVC_METRIC_Y>",
"type": "quantitative",
"title": "<DVC_METRIC_Y_LABEL>",
"scale": {
"zero": false
}
},
"color": {
"field": "rev",
"type": "nominal"
}
},
"transform": [
{
"loess": "<DVC_METRIC_Y>",
"on": "<DVC_METRIC_X>",
"groupby": [
"rev"
],
"bandwidth": 0.3
}
]
}
| datasets/.dvc/plots/smooth.json/0 | {
"file_path": "datasets/.dvc/plots/smooth.json",
"repo_id": "datasets",
"token_count": 569
} |
# How to contribute to Datasets?
[](CODE_OF_CONDUCT.md)
Datasets is an open source project, so all contributions and suggestions are welcome.
You can contribute in many different ways: giving ideas, answering questions, reporting bugs, proposing enhancements,
improving the documentation, fixing bugs,...
Many thanks in advance to every contributor.
In order to facilitate healthy, constructive behavior in an open and inclusive community, we all respect and abide by
our [code of conduct](CODE_OF_CONDUCT.md).
## How to work on an open Issue?
You have the list of open Issues at: https://github.com/huggingface/datasets/issues
Some of them may have the label `help wanted`: that means that any contributor is welcomed!
If you would like to work on any of the open Issues:
1. Make sure it is not already assigned to someone else. You have the assignee (if any) on the top of the right column of the Issue page.
2. You can self-assign it by commenting on the Issue page with the keyword: `#self-assign`.
3. Work on your self-assigned issue and eventually create a Pull Request.
## How to create a Pull Request?
If you want to add a dataset see specific instructions in the section [*How to add a dataset*](#how-to-add-a-dataset).
1. Fork the [repository](https://github.com/huggingface/datasets) by clicking on the 'Fork' button on the repository's page. This creates a copy of the code under your GitHub user account.
2. Clone your fork to your local disk, and add the base repository as a remote:
```bash
git clone [email protected]:<your Github handle>/datasets.git
cd datasets
git remote add upstream https://github.com/huggingface/datasets.git
```
3. Create a new branch to hold your development changes:
```bash
git checkout -b a-descriptive-name-for-my-changes
```
**do not** work on the `main` branch.
4. Set up a development environment by running the following command in a virtual environment:
Simple setup with code formatting only (recommended)
```bash
pip install -e ".[quality]"
```
Advanced setup with all the optional dependencies
```bash
pip install -e ".[dev]"
```
(If datasets was already installed in the virtual environment, remove
it with `pip uninstall datasets` before reinstalling it in editable
mode with the `-e` flag.)
5. Develop the features on your branch.
6. Format your code. Run `black` and `ruff` so that your newly added files look nice with the following command:
```bash
make style
```
7. _(Optional)_ You can also use [`pre-commit`](https://pre-commit.com/) to format your code automatically each time run `git commit`, instead of running `make style` manually.
To do this, install `pre-commit` via `pip install pre-commit` and then run `pre-commit install` in the project's root directory to set up the hooks.
Note that if any files were formatted by `pre-commit` hooks during committing, you have to run `git commit` again .
8. Once you're happy with your contribution, add your changed files and make a commit to record your changes locally:
```bash
git add -u
git commit
```
It is a good idea to sync your copy of the code with the original
repository regularly. This way you can quickly account for changes:
```bash
git fetch upstream
git rebase upstream/main
```
9. Once you are satisfied, push the changes to your fork repo using:
```bash
git push -u origin a-descriptive-name-for-my-changes
```
Go the webpage of your fork on GitHub. Click on "Pull request" to send your to the project maintainers for review.
## Datasets on Hugging Face
### How to add a dataset on Hugging Face
You can share your dataset on https://huggingface.co/datasets directly using your account (no need to open a PR on GitHub), see the documentation:
* [Create a dataset and upload files on the website](https://huggingface.co/docs/datasets/upload_dataset)
* [Advanced guide using the CLI](https://huggingface.co/docs/datasets/share)
### How to contribute to the dataset cards
Improving the documentation of datasets is an ever-increasing effort, and we invite users to contribute by sharing their insights with the community in the `README.md` dataset cards provided for each dataset.
If you see that a dataset card is missing information that you are in a position to provide (as an author of the dataset or as an experienced user), the best thing you can do is to open a Pull Request on the Hugging Face Hub. To do, go to the "Files and versions" tab of the dataset page and edit the `README.md` file. We provide:
* a [template](https://github.com/huggingface/datasets/blob/main/templates/README.md)
* a [guide](https://github.com/huggingface/datasets/blob/main/templates/README_guide.md) describing what information should go into each of the paragraphs
* and if you need inspiration, we recommend looking through a [completed example](https://huggingface.co/datasets/eli5/blob/main/README.md)
If you are a **dataset author**... you know what to do, it is your dataset after all ;) ! We would especially appreciate if you could help us fill in information about the process of creating the dataset, and take a moment to reflect on its social impact and possible limitations if you haven't already done so in the dataset paper or in another data statement.
If you are a **user of a dataset**, the main source of information should be the dataset paper if it is available: we recommend pulling information from there into the relevant paragraphs of the template. We also eagerly welcome discussions on the [Considerations for Using the Data](https://github.com/huggingface/datasets/blob/main/templates/README_guide.md#considerations-for-using-the-data) based on existing scholarship or personal experience that would benefit the whole community.
Finally, if you want more information on the how and why of dataset cards, we strongly recommend reading the foundational works [Datasheets for Datasets](https://arxiv.org/abs/1803.09010) and [Data Statements for NLP](https://www.aclweb.org/anthology/Q18-1041/).
Thank you for your contribution!
## Code of conduct
This project adheres to the HuggingFace [code of conduct](CODE_OF_CONDUCT.md).
By participating, you are expected to abide by this code.
| datasets/CONTRIBUTING.md/0 | {
"file_path": "datasets/CONTRIBUTING.md",
"repo_id": "datasets",
"token_count": 1793
} |
# Cache management
When you download a dataset from Hugging Face, the data are stored locally on your computer.
Files from Hugging Face are stored as usual in the `huggingface_hub` cache, which is at `~/.cache/huggingface/hub` by default.
See the [Hub cache documentation](https://huggingface.co/docs/huggingface_hub/guides/manage-cache) for more details and how to change its location.
The Hub cache allows 🤗 Datasets to avoid re-downloading dataset files from Hugging Face every time you use them.
🤗 Datasets also has its own cache to store datasets converted in Arrow format (the format used by [`Dataset`] objects).
This guide focuses on the 🤗 Datasets cache and will show you how to:
- Change the cache directory.
- Control how a dataset is loaded from the cache.
- Clean up cache files in the directory.
- Enable or disable caching.
## Cache directory
The default 🤗 Datasets cache directory is `~/.cache/huggingface/datasets`. Change the cache location by setting the shell environment variable, `HF_HOME` to another directory:
```
$ export HF_HOME="/path/to/another/directory/datasets"
```
When you load a dataset, you also have the option to change where the data is cached. Change the `cache_dir` parameter to the path you want:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('username/dataset', cache_dir="/path/to/another/directory/datasets")
```
## Download mode
After you download a dataset, control how it is loaded by [`load_dataset`] with the `download_mode` parameter. By default, 🤗 Datasets will reuse a dataset if it exists. But if you need the original dataset without any processing functions applied, re-download the files as shown below:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('squad', download_mode='force_redownload')
```
Refer to [`DownloadMode`] for a full list of download modes.
## Cache files
Clean up the Arrow cache files in the directory with [`Dataset.cleanup_cache_files`]:
```py
# Returns the number of removed cache files
>>> dataset.cleanup_cache_files()
2
```
## Enable or disable caching
If you're using a cached file locally, it will automatically reload the dataset with any previous transforms you applied to the dataset. Disable this behavior by setting the argument `load_from_cache_file=False` in [`Dataset.map`]:
```py
>>> updated_dataset = small_dataset.map(add_prefix, load_from_cache_file=False)
```
In the example above, 🤗 Datasets will execute the function `add_prefix` over the entire dataset again instead of loading the dataset from its previous state.
Disable caching on a global scale with [`disable_caching`]:
```py
>>> from datasets import disable_caching
>>> disable_caching()
```
When you disable caching, 🤗 Datasets will no longer reload cached files when applying transforms to datasets. Any transform you apply on your dataset will be need to be reapplied.
<Tip>
If you want to reuse a dataset from scratch, try setting the `download_mode` parameter in [`load_dataset`] instead.
</Tip>
<a id='load_dataset_enhancing_performance'></a>
## Improve performance
Disabling the cache and copying the dataset in-memory will speed up dataset operations. There are two options for copying the dataset in-memory:
1. Set `datasets.config.IN_MEMORY_MAX_SIZE` to a nonzero value (in bytes) that fits in your RAM memory.
2. Set the environment variable `HF_DATASETS_IN_MEMORY_MAX_SIZE` to a nonzero value. Note that the first method takes higher precedence.
| datasets/docs/source/cache.mdx/0 | {
"file_path": "datasets/docs/source/cache.mdx",
"repo_id": "datasets",
"token_count": 988
} |
# Installation
Before you start, you'll need to setup your environment and install the appropriate packages. 🤗 Datasets is tested on **Python 3.7+**.
<Tip>
If you want to use 🤗 Datasets with TensorFlow or PyTorch, you'll need to install them separately. Refer to the [TensorFlow installation page](https://www.tensorflow.org/install/pip#tensorflow-2-packages-are-available) or the [PyTorch installation page](https://pytorch.org/get-started/locally/#start-locally) for the specific install command for your framework.
</Tip>
## Virtual environment
You should install 🤗 Datasets in a [virtual environment](https://docs.python.org/3/library/venv.html) to keep things tidy and avoid dependency conflicts.
1. Create and navigate to your project directory:
```bash
mkdir ~/my-project
cd ~/my-project
```
2. Start a virtual environment inside your directory:
```bash
python -m venv .env
```
3. Activate and deactivate the virtual environment with the following commands:
```bash
# Activate the virtual environment
source .env/bin/activate
# Deactivate the virtual environment
source .env/bin/deactivate
```
Once you've created your virtual environment, you can install 🤗 Datasets in it.
## pip
The most straightforward way to install 🤗 Datasets is with pip:
```bash
pip install datasets
```
Run the following command to check if 🤗 Datasets has been properly installed:
```bash
python -c "from datasets import load_dataset; print(load_dataset('squad', split='train')[0])"
```
This command downloads version 1 of the [Stanford Question Answering Dataset (SQuAD)](https://rajpurkar.github.io/SQuAD-explorer/), loads the training split, and prints the first training example. You should see:
```python
{'answers': {'answer_start': [515], 'text': ['Saint Bernadette Soubirous']}, 'context': 'Architecturally, the school has a Catholic character. Atop the Main Building\'s gold dome is a golden statue of the Virgin Mary. Immediately in front of the Main Building and facing it, is a copper statue of Christ with arms upraised with the legend "Venite Ad Me Omnes". Next to the Main Building is the Basilica of the Sacred Heart. Immediately behind the basilica is the Grotto, a Marian place of prayer and reflection. It is a replica of the grotto at Lourdes, France where the Virgin Mary reputedly appeared to Saint Bernadette Soubirous in 1858. At the end of the main drive (and in a direct line that connects through 3 statues and the Gold Dome), is a simple, modern stone statue of Mary.', 'id': '5733be284776f41900661182', 'question': 'To whom did the Virgin Mary allegedly appear in 1858 in Lourdes France?', 'title': 'University_of_Notre_Dame'}
```
## Audio
To work with audio datasets, you need to install the [`Audio`] feature as an extra dependency:
```bash
pip install datasets[audio]
```
<Tip warning={true}>
To decode mp3 files, you need to have at least version 1.1.0 of the `libsndfile` system library. Usually, it's bundled with the python [`soundfile`](https://github.com/bastibe/python-soundfile) package, which is installed as an extra audio dependency for 🤗 Datasets.
For Linux, the required version of `libsndfile` is bundled with `soundfile` starting from version 0.12.0. You can run the following command to determine which version of `libsndfile` is being used by `soundfile`:
```bash
python -c "import soundfile; print(soundfile.__libsndfile_version__)"
```
</Tip>
## Vision
To work with image datasets, you need to install the [`Image`] feature as an extra dependency:
```bash
pip install datasets[vision]
```
## source
Building 🤗 Datasets from source lets you make changes to the code base. To install from the source, clone the repository and install with the following commands:
```bash
git clone https://github.com/huggingface/datasets.git
cd datasets
pip install -e .
```
Again, you can check if 🤗 Datasets was properly installed with the following command:
```bash
python -c "from datasets import load_dataset; print(load_dataset('squad', split='train')[0])"
```
## conda
🤗 Datasets can also be installed from conda, a package management system:
```bash
conda install -c huggingface -c conda-forge datasets
```
| datasets/docs/source/installation.md/0 | {
"file_path": "datasets/docs/source/installation.md",
"repo_id": "datasets",
"token_count": 1236
} |
# Stream
Dataset streaming lets you work with a dataset without downloading it.
The data is streamed as you iterate over the dataset.
This is especially helpful when:
- You don't want to wait for an extremely large dataset to download.
- The dataset size exceeds the amount of available disk space on your computer.
- You want to quickly explore just a few samples of a dataset.
<div class="flex justify-center">
<img class="block dark:hidden" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/datasets/streaming.gif"/>
<img class="hidden dark:block" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/datasets/streaming-dark.gif"/>
</div>
For example, the English split of the [oscar-corpus/OSCAR-2201](https://huggingface.co/datasets/oscar-corpus/OSCAR-2201) dataset is 1.2 terabytes, but you can use it instantly with streaming. Stream a dataset by setting `streaming=True` in [`load_dataset`] as shown below:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('oscar-corpus/OSCAR-2201', 'en', split='train', streaming=True)
>>> print(next(iter(dataset)))
{'id': 0, 'text': 'Founded in 2015, Golden Bees is a leading programmatic recruitment platform dedicated to employers, HR agencies and job boards. The company has developed unique HR-custom technologies and predictive algorithms to identify and attract the best candidates for a job opportunity.', ...
```
Dataset streaming also lets you work with a dataset made of local files without doing any conversion.
In this case, the data is streamed from the local files as you iterate over the dataset.
This is especially helpful when:
- You don't want to wait for an extremely large local dataset to be converted to Arrow.
- The converted files size would exceed the amount of available disk space on your computer.
- You want to quickly explore just a few samples of a dataset.
For example, you can stream a local dataset of hundreds of compressed JSONL files like [oscar-corpus/OSCAR-2201](https://huggingface.co/datasets/oscar-corpus/OSCAR-2201) to use it instantly:
```py
>>> from datasets import load_dataset
>>> data_files = {'train': 'path/to/OSCAR-2201/compressed/en_meta/*.jsonl.gz'}
>>> dataset = load_dataset('json', data_files=data_files, split='train', streaming=True)
>>> print(next(iter(dataset)))
{'id': 0, 'text': 'Founded in 2015, Golden Bees is a leading programmatic recruitment platform dedicated to employers, HR agencies and job boards. The company has developed unique HR-custom technologies and predictive algorithms to identify and attract the best candidates for a job opportunity.', ...
```
Loading a dataset in streaming mode creates a new dataset type instance (instead of the classic [`Dataset`] object), known as an [`IterableDataset`].
This special type of dataset has its own set of processing methods shown below.
<Tip>
An [`IterableDataset`] is useful for iterative jobs like training a model.
You shouldn't use a [`IterableDataset`] for jobs that require random access to examples because you have to iterate all over it using a for loop. Getting the last example in an iterable dataset would require you to iterate over all the previous examples.
You can find more details in the [Dataset vs. IterableDataset guide](./about_mapstyle_vs_iterable).
</Tip>
## Convert from a Dataset
If you have an existing [`Dataset`] object, you can convert it to an [`IterableDataset`] with the [`~Dataset.to_iterable_dataset`] function. This is actually faster than setting the `streaming=True` argument in [`load_dataset`] because the data is streamed from local files.
```py
>>> from datasets import load_dataset
# faster 🐇
>>> dataset = load_dataset("food101")
>>> iterable_dataset = dataset.to_iterable_dataset()
# slower 🐢
>>> iterable_dataset = load_dataset("food101", streaming=True)
```
The [`~Dataset.to_iterable_dataset`] function supports sharding when the [`IterableDataset`] is instantiated. This is useful when working with big datasets, and you'd like to shuffle the dataset or to enable fast parallel loading with a PyTorch DataLoader.
```py
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("food101")
>>> iterable_dataset = dataset.to_iterable_dataset(num_shards=64) # shard the dataset
>>> iterable_dataset = iterable_dataset.shuffle(buffer_size=10_000) # shuffles the shards order and use a shuffle buffer when you start iterating
dataloader = torch.utils.data.DataLoader(iterable_dataset, num_workers=4) # assigns 64 / 4 = 16 shards from the shuffled list of shards to each worker when you start iterating
```
## Shuffle
Like a regular [`Dataset`] object, you can also shuffle a [`IterableDataset`] with [`IterableDataset.shuffle`].
The `buffer_size` argument controls the size of the buffer to randomly sample examples from. Let's say your dataset has one million examples, and you set the `buffer_size` to ten thousand. [`IterableDataset.shuffle`] will randomly select examples from the first ten thousand examples in the buffer. Selected examples in the buffer are replaced with new examples. By default, the buffer size is 1,000.
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('oscar', "unshuffled_deduplicated_en", split='train', streaming=True)
>>> shuffled_dataset = dataset.shuffle(seed=42, buffer_size=10_000)
```
<Tip>
[`IterableDataset.shuffle`] will also shuffle the order of the shards if the dataset is sharded into multiple files.
</Tip>
## Reshuffle
Sometimes you may want to reshuffle the dataset after each epoch. This will require you to set a different seed for each epoch. Use [`IterableDataset.set_epoch`] in between epochs to tell the dataset what epoch you're on.
Your seed effectively becomes: `initial seed + current epoch`.
```py
>>> for epoch in range(epochs):
... shuffled_dataset.set_epoch(epoch)
... for example in shuffled_dataset:
... ...
```
## Split dataset
You can split your dataset one of two ways:
- [`IterableDataset.take`] returns the first `n` examples in a dataset:
```py
>>> dataset = load_dataset('oscar', "unshuffled_deduplicated_en", split='train', streaming=True)
>>> dataset_head = dataset.take(2)
>>> list(dataset_head)
[{'id': 0, 'text': 'Mtendere Village was...'}, {'id': 1, 'text': 'Lily James cannot fight the music...'}]
```
- [`IterableDataset.skip`] omits the first `n` examples in a dataset and returns the remaining examples:
```py
>>> train_dataset = shuffled_dataset.skip(1000)
```
<Tip warning={true}>
`take` and `skip` prevent future calls to `shuffle` because they lock in the order of the shards. You should `shuffle` your dataset before splitting it.
</Tip>
<a id='interleave_datasets'></a>
### Shard
🤗 Datasets supports sharding to divide a very large dataset into a predefined number of chunks. Specify the `num_shards` parameter in [`~IterableDataset.shard`] to determine the number of shards to split the dataset into. You'll also need to provide the shard you want to return with the `index` parameter.
For example, the [amazon_polarity](https://huggingface.co/datasets/amazon_polarity) dataset has 4 shards (in this case they are 4 Parquet files):
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset("amazon_polarity", split="train", streaming=True)
>>> print(dataset)
IterableDataset({
features: ['label', 'title', 'content'],
num_shards: 4
})
```
After sharding the dataset into two chunks, the first one will only have 2 shards:
```py
>>> dataset.shard(num_shards=2, index=0)
IterableDataset({
features: ['label', 'title', 'content'],
num_shards: 2
})
```
If your dataset has `dataset.num_shards==1`, you should chunk it using [`IterableDataset.skip`] and [`IterableDataset.take`] instead.
## Interleave
[`interleave_datasets`] can combine an [`IterableDataset`] with other datasets. The combined dataset returns alternating examples from each of the original datasets.
```py
>>> from datasets import interleave_datasets
>>> en_dataset = load_dataset('oscar', "unshuffled_deduplicated_en", split='train', streaming=True, trust_remote_code=True)
>>> fr_dataset = load_dataset('oscar', "unshuffled_deduplicated_fr", split='train', streaming=True, trust_remote_code=True)
>>> multilingual_dataset = interleave_datasets([en_dataset, fr_dataset])
>>> list(multilingual_dataset.take(2))
[{'text': 'Mtendere Village was inspired by the vision...'}, {'text': "Média de débat d'idées, de culture et de littérature..."}]
```
Define sampling probabilities from each of the original datasets for more control over how each of them are sampled and combined. Set the `probabilities` argument with your desired sampling probabilities:
```py
>>> multilingual_dataset_with_oversampling = interleave_datasets([en_dataset, fr_dataset], probabilities=[0.8, 0.2], seed=42)
>>> list(multilingual_dataset_with_oversampling.take(2))
[{'text': 'Mtendere Village was inspired by the vision...'}, {'text': 'Lily James cannot fight the music...'}]
```
Around 80% of the final dataset is made of the `en_dataset`, and 20% of the `fr_dataset`.
You can also specify the `stopping_strategy`. The default strategy, `first_exhausted`, is a subsampling strategy, i.e the dataset construction is stopped as soon one of the dataset runs out of samples.
You can specify `stopping_strategy=all_exhausted` to execute an oversampling strategy. In this case, the dataset construction is stopped as soon as every samples in every dataset has been added at least once. In practice, it means that if a dataset is exhausted, it will return to the beginning of this dataset until the stop criterion has been reached.
Note that if no sampling probabilities are specified, the new dataset will have `max_length_datasets*nb_dataset samples`.
## Rename, remove, and cast
The following methods allow you to modify the columns of a dataset. These methods are useful for renaming or removing columns and changing columns to a new set of features.
### Rename
Use [`IterableDataset.rename_column`] when you need to rename a column in your dataset. Features associated with the original column are actually moved under the new column name, instead of just replacing the original column in-place.
Provide [`IterableDataset.rename_column`] with the name of the original column, and the new column name:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('mc4', 'en', streaming=True, split='train', trust_remote_code=True)
>>> dataset = dataset.rename_column("text", "content")
```
### Remove
When you need to remove one or more columns, give [`IterableDataset.remove_columns`] the name of the column to remove. Remove more than one column by providing a list of column names:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('mc4', 'en', streaming=True, split='train', trust_remote_code=True)
>>> dataset = dataset.remove_columns('timestamp')
```
### Cast
[`IterableDataset.cast`] changes the feature type of one or more columns. This method takes your new `Features` as its argument. The following sample code shows how to change the feature types of `ClassLabel` and `Value`:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('glue', 'mrpc', split='train', streaming=True)
>>> dataset.features
{'sentence1': Value(dtype='string', id=None),
'sentence2': Value(dtype='string', id=None),
'label': ClassLabel(names=['not_equivalent', 'equivalent'], id=None),
'idx': Value(dtype='int32', id=None)}
>>> from datasets import ClassLabel, Value
>>> new_features = dataset.features.copy()
>>> new_features["label"] = ClassLabel(names=['negative', 'positive'])
>>> new_features["idx"] = Value('int64')
>>> dataset = dataset.cast(new_features)
>>> dataset.features
{'sentence1': Value(dtype='string', id=None),
'sentence2': Value(dtype='string', id=None),
'label': ClassLabel(names=['negative', 'positive'], id=None),
'idx': Value(dtype='int64', id=None)}
```
<Tip>
Casting only works if the original feature type and new feature type are compatible. For example, you can cast a column with the feature type `Value('int32')` to `Value('bool')` if the original column only contains ones and zeros.
</Tip>
Use [`IterableDataset.cast_column`] to change the feature type of just one column. Pass the column name and its new feature type as arguments:
```py
>>> dataset.features
{'audio': Audio(sampling_rate=44100, mono=True, id=None)}
>>> dataset = dataset.cast_column("audio", Audio(sampling_rate=16000))
>>> dataset.features
{'audio': Audio(sampling_rate=16000, mono=True, id=None)}
```
## Map
Similar to the [`Dataset.map`] function for a regular [`Dataset`], 🤗 Datasets features [`IterableDataset.map`] for processing an [`IterableDataset`].
[`IterableDataset.map`] applies processing on-the-fly when examples are streamed.
It allows you to apply a processing function to each example in a dataset, independently or in batches. This function can even create new rows and columns.
The following example demonstrates how to tokenize a [`IterableDataset`]. The function needs to accept and output a `dict`:
```py
>>> def add_prefix(example):
... example['text'] = 'My text: ' + example['text']
... return example
```
Next, apply this function to the dataset with [`IterableDataset.map`]:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('oscar', 'unshuffled_deduplicated_en', streaming=True, split='train', trust_remote_code=True)
>>> updated_dataset = dataset.map(add_prefix)
>>> list(updated_dataset.take(3))
[{'id': 0, 'text': 'My text: Mtendere Village was inspired by...'},
{'id': 1, 'text': 'My text: Lily James cannot fight the music...'},
{'id': 2, 'text': 'My text: "I\'d love to help kickstart...'}]
```
Let's take a look at another example, except this time, you will remove a column with [`IterableDataset.map`]. When you remove a column, it is only removed after the example has been provided to the mapped function. This allows the mapped function to use the content of the columns before they are removed.
Specify the column to remove with the `remove_columns` argument in [`IterableDataset.map`]:
```py
>>> updated_dataset = dataset.map(add_prefix, remove_columns=["id"])
>>> list(updated_dataset.take(3))
[{'text': 'My text: Mtendere Village was inspired by...'},
{'text': 'My text: Lily James cannot fight the music...'},
{'text': 'My text: "I\'d love to help kickstart...'}]
```
### Batch processing
[`IterableDataset.map`] also supports working with batches of examples. Operate on batches by setting `batched=True`. The default batch size is 1000, but you can adjust it with the `batch_size` argument. This opens the door to many interesting applications such as tokenization, splitting long sentences into shorter chunks, and data augmentation.
#### Tokenization
```py
>>> from datasets import load_dataset
>>> from transformers import AutoTokenizer
>>> dataset = load_dataset("mc4", "en", streaming=True, split="train", trust_remote_code=True)
>>> tokenizer = AutoTokenizer.from_pretrained('distilbert-base-uncased')
>>> def encode(examples):
... return tokenizer(examples['text'], truncation=True, padding='max_length')
>>> dataset = dataset.map(encode, batched=True, remove_columns=["text", "timestamp", "url"])
>>> next(iter(dataset))
{'input_ids': [101, 8466, 1018, 1010, 4029, 2475, 2062, 18558, 3100, 2061, ...,1106, 3739, 102],
'attention_mask': [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, ..., 1, 1]}
```
<Tip>
See other examples of batch processing in the [batched map processing](./process#batch-processing) documentation. They work the same for iterable datasets.
</Tip>
### Filter
You can filter rows in the dataset based on a predicate function using [`Dataset.filter`]. It returns rows that match a specified condition:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset('oscar', 'unshuffled_deduplicated_en', streaming=True, split='train', trust_remote_code=True)
>>> start_with_ar = dataset.filter(lambda example: example['text'].startswith('Ar'))
>>> next(iter(start_with_ar))
{'id': 4, 'text': 'Are you looking for Number the Stars (Essential Modern Classics)?...'}
```
[`Dataset.filter`] can also filter by indices if you set `with_indices=True`:
```py
>>> even_dataset = dataset.filter(lambda example, idx: idx % 2 == 0, with_indices=True)
>>> list(even_dataset.take(3))
[{'id': 0, 'text': 'Mtendere Village was inspired by the vision of Chief Napoleon Dzombe, ...'},
{'id': 2, 'text': '"I\'d love to help kickstart continued development! And 0 EUR/month...'},
{'id': 4, 'text': 'Are you looking for Number the Stars (Essential Modern Classics)? Normally, ...'}]
```
## Batch
The `batch` method transforms your `IterableDataset` into an iterable of batches. This is particularly useful when you want to work with batches in your training loop or when using frameworks that expect batched inputs.
<Tip>
There is also a "Batch Processing" option when using the `map` function to apply a function to batches of data, which is discussed in the [Map section](#map) above. The `batch` method described here is different and provides a more direct way to create batches from your dataset.
</Tip>
You can use the `batch` method like this:
```python
from datasets import load_dataset
# Load a dataset in streaming mode
dataset = load_dataset("some_dataset", split="train", streaming=True)
# Create batches of 32 samples
batched_dataset = dataset.batch(batch_size=32)
# Iterate over the batched dataset
for batch in batched_dataset:
print(batch)
break
```
In this example, batched_dataset is still an IterableDataset, but each item yielded is now a batch of 32 samples instead of a single sample.
This batching is done on-the-fly as you iterate over the dataset, preserving the memory-efficient nature of IterableDataset.
The batch method also provides a drop_last_batch parameter.
When set to True, it will discard the last batch if it's smaller than the specified batch_size.
This can be useful in scenarios where your downstream processing requires all batches to be of the same size:
```python
batched_dataset = dataset.batch(batch_size=32, drop_last_batch=True)
```
## Stream in a training loop
[`IterableDataset`] can be integrated into a training loop. First, shuffle the dataset:
<frameworkcontent>
<pt>
```py
>>> seed, buffer_size = 42, 10_000
>>> dataset = dataset.shuffle(seed, buffer_size=buffer_size)
```
Lastly, create a simple training loop and start training:
```py
>>> import torch
>>> from torch.utils.data import DataLoader
>>> from transformers import AutoModelForMaskedLM, DataCollatorForLanguageModeling
>>> from tqdm import tqdm
>>> dataset = dataset.with_format("torch")
>>> dataloader = DataLoader(dataset, collate_fn=DataCollatorForLanguageModeling(tokenizer))
>>> device = 'cuda' if torch.cuda.is_available() else 'cpu'
>>> model = AutoModelForMaskedLM.from_pretrained("distilbert-base-uncased")
>>> model.train().to(device)
>>> optimizer = torch.optim.AdamW(params=model.parameters(), lr=1e-5)
>>> for epoch in range(3):
... dataset.set_epoch(epoch)
... for i, batch in enumerate(tqdm(dataloader, total=5)):
... if i == 5:
... break
... batch = {k: v.to(device) for k, v in batch.items()}
... outputs = model(**batch)
... loss = outputs[0]
... loss.backward()
... optimizer.step()
... optimizer.zero_grad()
... if i % 10 == 0:
... print(f"loss: {loss}")
```
</pt>
</frameworkcontent>
<!-- TODO: Write the TF content! -->
### Save a dataset checkpoint and resume iteration
If your training loop stops, you may want to restart the training from where it was. To do so you can save a checkpoint of your model and optimizers, as well as your data loader.
Iterable datasets don't provide random access to a specific example index to resume from, but you can use [`IterableDataset.state_dict`] and [`IterableDataset.load_state_dict`] to resume from a checkpoint instead, similarly to what you can do for models and optimizers:
```python
>>> iterable_dataset = Dataset.from_dict({"a": range(6)}).to_iterable_dataset(num_shards=3)
>>> for idx, example in enumerate(iterable_dataset):
... print(example)
... if idx == 2:
... state_dict = iterable_dataset.state_dict()
... print("checkpoint")
... break
>>> iterable_dataset.load_state_dict(state_dict)
>>> print(f"restart from checkpoint")
>>> for example in iterable_dataset:
... print(example)
```
Returns:
```
{'a': 0}
{'a': 1}
{'a': 2}
checkpoint
restart from checkpoint
{'a': 3}
{'a': 4}
{'a': 5}
```
Under the hood, the iterable dataset keeps track of the current shard being read and the example index in the current shard and it stores this info in the `state_dict`.
To resume from a checkpoint, the dataset skips all the shards that were previously read to restart from the current shard.
Then it reads the shard and skips examples until it reaches the exact example from the checkpoint.
Therefore restarting a dataset is quite fast, since it will not re-read the shards that have already been iterated on. Still, resuming a dataset is generally not instantaneous since it has to restart reading from the beginning of the current shard and skip examples until it reaches the checkpoint location.
This can be used with the `StatefulDataLoader` from `torchdata`:
```python
>>> from torchdata.stateful_dataloader import StatefulDataLoader
>>> iterable_dataset = load_dataset("deepmind/code_contests", streaming=True, split="train")
>>> dataloader = StatefulDataLoader(iterable_dataset, batch_size=32, num_workers=4)
>>> # checkpoint
>>> state_dict = dataloader.state_dict() # uses iterable_dataset.state_dict() under the hood
>>> # resume from checkpoint
>>> dataloader.load_state_dict(state_dict) # uses iterable_dataset.load_state_dict() under the hood
```
<Tip>
Resuming returns exactly where the checkpoint was saved except if `.shuffle()` is used: examples from shuffle buffers are lost when resuming and the buffers are refilled with new data.
</Tip>
| datasets/docs/source/stream.mdx/0 | {
"file_path": "datasets/docs/source/stream.mdx",
"repo_id": "datasets",
"token_count": 6827
} |
<!---
Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
# 🤗 Datasets Notebooks
You can find here a list of the official notebooks provided by Hugging Face.
Also, we would like to list here interesting content created by the community.
If you wrote some notebook(s) leveraging 🤗 Datasets and would like it to be listed here, please open a
Pull Request so it can be included under the Community notebooks.
## Hugging Face's notebooks 🤗
### Documentation notebooks
You can open any page of the documentation as a notebook in Colab (there is a button directly on said pages) but they are also listed here if you need them:
| Notebook | Description | | |
|:----------|:-------------|:-------------|------:|
| [Quickstart](https://github.com/huggingface/notebooks/blob/main/datasets_doc/en/quickstart.ipynb) | A quick presentation on integrating Datasets into a model training workflow |[](https://colab.research.google.com/github/huggingface/notebooks/blob/main/datasets_doc/en/quickstart.ipynb)| [](https://studiolab.sagemaker.aws/import/github/huggingface/notebooks/blob/main/datasets_doc/en/quickstart.ipynb)|
| datasets/notebooks/README.md/0 | {
"file_path": "datasets/notebooks/README.md",
"repo_id": "datasets",
"token_count": 534
} |
import importlib
import importlib.metadata
import logging
import os
import platform
from pathlib import Path
from typing import Optional
from huggingface_hub import constants
from packaging import version
logger = logging.getLogger(__name__.split(".", 1)[0]) # to avoid circular import from .utils.logging
# Datasets
S3_DATASETS_BUCKET_PREFIX = "https://s3.amazonaws.com/datasets.huggingface.co/datasets/datasets"
CLOUDFRONT_DATASETS_DISTRIB_PREFIX = "https://cdn-datasets.huggingface.co/datasets/datasets"
REPO_DATASETS_URL = "https://raw.githubusercontent.com/huggingface/datasets/{revision}/datasets/{path}/{name}"
# Hub
HF_ENDPOINT = os.environ.get("HF_ENDPOINT", "https://huggingface.co")
HUB_DATASETS_URL = HF_ENDPOINT + "/datasets/{repo_id}/resolve/{revision}/{path}"
HUB_DATASETS_HFFS_URL = "hf://datasets/{repo_id}@{revision}/{path}"
HUB_DEFAULT_VERSION = "main"
PY_VERSION = version.parse(platform.python_version())
# General environment variables accepted values for booleans
ENV_VARS_TRUE_VALUES = {"1", "ON", "YES", "TRUE"}
ENV_VARS_FALSE_VALUES = {"0", "OFF", "NO", "FALSE"}
ENV_VARS_TRUE_AND_AUTO_VALUES = ENV_VARS_TRUE_VALUES.union({"AUTO"})
ENV_VARS_FALSE_AND_AUTO_VALUES = ENV_VARS_FALSE_VALUES.union({"AUTO"})
# Imports
DILL_VERSION = version.parse(importlib.metadata.version("dill"))
FSSPEC_VERSION = version.parse(importlib.metadata.version("fsspec"))
PANDAS_VERSION = version.parse(importlib.metadata.version("pandas"))
PYARROW_VERSION = version.parse(importlib.metadata.version("pyarrow"))
HF_HUB_VERSION = version.parse(importlib.metadata.version("huggingface_hub"))
USE_TF = os.environ.get("USE_TF", "AUTO").upper()
USE_TORCH = os.environ.get("USE_TORCH", "AUTO").upper()
USE_JAX = os.environ.get("USE_JAX", "AUTO").upper()
TORCH_VERSION = "N/A"
TORCH_AVAILABLE = False
if USE_TORCH in ENV_VARS_TRUE_AND_AUTO_VALUES and USE_TF not in ENV_VARS_TRUE_VALUES:
TORCH_AVAILABLE = importlib.util.find_spec("torch") is not None
if TORCH_AVAILABLE:
try:
TORCH_VERSION = version.parse(importlib.metadata.version("torch"))
logger.info(f"PyTorch version {TORCH_VERSION} available.")
except importlib.metadata.PackageNotFoundError:
pass
else:
logger.info("Disabling PyTorch because USE_TF is set")
POLARS_VERSION = "N/A"
POLARS_AVAILABLE = importlib.util.find_spec("polars") is not None
if POLARS_AVAILABLE:
try:
POLARS_VERSION = version.parse(importlib.metadata.version("polars"))
logger.info(f"Polars version {POLARS_VERSION} available.")
except importlib.metadata.PackageNotFoundError:
pass
DUCKDB_VERSION = "N/A"
DUCKDB_AVAILABLE = importlib.util.find_spec("duckdb") is not None
if DUCKDB_AVAILABLE:
try:
DUCKDB_VERSION = version.parse(importlib.metadata.version("duckdb"))
logger.info(f"Duckdb version {DUCKDB_VERSION} available.")
except importlib.metadata.PackageNotFoundError:
pass
TF_VERSION = "N/A"
TF_AVAILABLE = False
if USE_TF in ENV_VARS_TRUE_AND_AUTO_VALUES and USE_TORCH not in ENV_VARS_TRUE_VALUES:
TF_AVAILABLE = importlib.util.find_spec("tensorflow") is not None
if TF_AVAILABLE:
# For the metadata, we have to look for both tensorflow and tensorflow-cpu
for package in [
"tensorflow",
"tensorflow-cpu",
"tensorflow-gpu",
"tf-nightly",
"tf-nightly-cpu",
"tf-nightly-gpu",
"intel-tensorflow",
"tensorflow-rocm",
"tensorflow-macos",
]:
try:
TF_VERSION = version.parse(importlib.metadata.version(package))
except importlib.metadata.PackageNotFoundError:
continue
else:
break
else:
TF_AVAILABLE = False
if TF_AVAILABLE:
if TF_VERSION.major < 2:
logger.info(f"TensorFlow found but with version {TF_VERSION}. `datasets` requires version 2 minimum.")
TF_AVAILABLE = False
else:
logger.info(f"TensorFlow version {TF_VERSION} available.")
else:
logger.info("Disabling Tensorflow because USE_TORCH is set")
JAX_VERSION = "N/A"
JAX_AVAILABLE = False
if USE_JAX in ENV_VARS_TRUE_AND_AUTO_VALUES:
JAX_AVAILABLE = importlib.util.find_spec("jax") is not None and importlib.util.find_spec("jaxlib") is not None
if JAX_AVAILABLE:
try:
JAX_VERSION = version.parse(importlib.metadata.version("jax"))
logger.info(f"JAX version {JAX_VERSION} available.")
except importlib.metadata.PackageNotFoundError:
pass
else:
logger.info("Disabling JAX because USE_JAX is set to False")
# Optional tools for data loading
SQLALCHEMY_AVAILABLE = importlib.util.find_spec("sqlalchemy") is not None
# Optional tools for feature decoding
PIL_AVAILABLE = importlib.util.find_spec("PIL") is not None
IS_OPUS_SUPPORTED = importlib.util.find_spec("soundfile") is not None and version.parse(
importlib.import_module("soundfile").__libsndfile_version__
) >= version.parse("1.0.31")
IS_MP3_SUPPORTED = importlib.util.find_spec("soundfile") is not None and version.parse(
importlib.import_module("soundfile").__libsndfile_version__
) >= version.parse("1.1.0")
DECORD_AVAILABLE = importlib.util.find_spec("decord") is not None
# Optional compression tools
RARFILE_AVAILABLE = importlib.util.find_spec("rarfile") is not None
ZSTANDARD_AVAILABLE = importlib.util.find_spec("zstandard") is not None
LZ4_AVAILABLE = importlib.util.find_spec("lz4") is not None
PY7ZR_AVAILABLE = importlib.util.find_spec("py7zr") is not None
# Cache location
DEFAULT_XDG_CACHE_HOME = "~/.cache"
XDG_CACHE_HOME = os.getenv("XDG_CACHE_HOME", DEFAULT_XDG_CACHE_HOME)
DEFAULT_HF_CACHE_HOME = os.path.join(XDG_CACHE_HOME, "huggingface")
HF_CACHE_HOME = os.path.expanduser(os.getenv("HF_HOME", DEFAULT_HF_CACHE_HOME))
DEFAULT_HF_DATASETS_CACHE = os.path.join(HF_CACHE_HOME, "datasets")
HF_DATASETS_CACHE = Path(os.getenv("HF_DATASETS_CACHE", DEFAULT_HF_DATASETS_CACHE))
DEFAULT_HF_MODULES_CACHE = os.path.join(HF_CACHE_HOME, "modules")
HF_MODULES_CACHE = Path(os.getenv("HF_MODULES_CACHE", DEFAULT_HF_MODULES_CACHE))
DOWNLOADED_DATASETS_DIR = "downloads"
DEFAULT_DOWNLOADED_DATASETS_PATH = os.path.join(HF_DATASETS_CACHE, DOWNLOADED_DATASETS_DIR)
DOWNLOADED_DATASETS_PATH = Path(os.getenv("HF_DATASETS_DOWNLOADED_DATASETS_PATH", DEFAULT_DOWNLOADED_DATASETS_PATH))
EXTRACTED_DATASETS_DIR = "extracted"
DEFAULT_EXTRACTED_DATASETS_PATH = os.path.join(DEFAULT_DOWNLOADED_DATASETS_PATH, EXTRACTED_DATASETS_DIR)
EXTRACTED_DATASETS_PATH = Path(os.getenv("HF_DATASETS_EXTRACTED_DATASETS_PATH", DEFAULT_EXTRACTED_DATASETS_PATH))
# Download count for the website
HF_UPDATE_DOWNLOAD_COUNTS = (
os.environ.get("HF_UPDATE_DOWNLOAD_COUNTS", "AUTO").upper() in ENV_VARS_TRUE_AND_AUTO_VALUES
)
# For downloads and to check remote files metadata
HF_DATASETS_MULTITHREADING_MAX_WORKERS = 16
# Remote dataset scripts support
__HF_DATASETS_TRUST_REMOTE_CODE = os.environ.get("HF_DATASETS_TRUST_REMOTE_CODE", "ask")
HF_DATASETS_TRUST_REMOTE_CODE: Optional[bool] = (
True
if __HF_DATASETS_TRUST_REMOTE_CODE.upper() in ENV_VARS_TRUE_VALUES
else False
if __HF_DATASETS_TRUST_REMOTE_CODE.upper() in ENV_VARS_FALSE_VALUES
else None
)
TIME_OUT_REMOTE_CODE = 15
# Dataset viewer API
USE_PARQUET_EXPORT = True
# Batch size constants. For more info, see:
# https://github.com/apache/arrow/blob/master/docs/source/cpp/arrays.rst#size-limitations-and-recommendations)
DEFAULT_MAX_BATCH_SIZE = 1000
# Size of the preloaded record batch in `Dataset.__iter__`
ARROW_READER_BATCH_SIZE_IN_DATASET_ITER = 10
# Max shard size in bytes (e.g. to shard parquet datasets in push_to_hub or download_and_prepare)
MAX_SHARD_SIZE = "500MB"
# Parquet configuration
PARQUET_ROW_GROUP_SIZE_FOR_AUDIO_DATASETS = 100
PARQUET_ROW_GROUP_SIZE_FOR_IMAGE_DATASETS = 100
PARQUET_ROW_GROUP_SIZE_FOR_BINARY_DATASETS = 100
PARQUET_ROW_GROUP_SIZE_FOR_VIDEO_DATASETS = 10
# Offline mode
_offline = os.environ.get("HF_DATASETS_OFFLINE")
HF_HUB_OFFLINE = constants.HF_HUB_OFFLINE if _offline is None else _offline.upper() in ENV_VARS_TRUE_VALUES
HF_DATASETS_OFFLINE = HF_HUB_OFFLINE # kept for backward-compatibility
# Here, `True` will disable progress bars globally without possibility of enabling it
# programmatically. `False` will enable them without possibility of disabling them.
# If environment variable is not set (None), then the user is free to enable/disable
# them programmatically.
# TL;DR: env variable has priority over code
__HF_DATASETS_DISABLE_PROGRESS_BARS = os.environ.get("HF_DATASETS_DISABLE_PROGRESS_BARS")
HF_DATASETS_DISABLE_PROGRESS_BARS: Optional[bool] = (
__HF_DATASETS_DISABLE_PROGRESS_BARS.upper() in ENV_VARS_TRUE_VALUES
if __HF_DATASETS_DISABLE_PROGRESS_BARS is not None
else None
)
# In-memory
DEFAULT_IN_MEMORY_MAX_SIZE = 0 # Disabled
IN_MEMORY_MAX_SIZE = float(os.environ.get("HF_DATASETS_IN_MEMORY_MAX_SIZE", DEFAULT_IN_MEMORY_MAX_SIZE))
# File names
DATASET_ARROW_FILENAME = "dataset.arrow"
DATASET_INDICES_FILENAME = "indices.arrow"
DATASET_STATE_JSON_FILENAME = "state.json"
DATASET_INFO_FILENAME = "dataset_info.json"
DATASETDICT_INFOS_FILENAME = "dataset_infos.json"
LICENSE_FILENAME = "LICENSE"
DATASETDICT_JSON_FILENAME = "dataset_dict.json"
METADATA_CONFIGS_FIELD = "configs"
REPOCARD_FILENAME = "README.md"
REPOYAML_FILENAME = ".huggingface.yaml"
MODULE_NAME_FOR_DYNAMIC_MODULES = "datasets_modules"
MAX_DATASET_CONFIG_ID_READABLE_LENGTH = 255
# Temporary cache directory prefix
TEMP_CACHE_DIR_PREFIX = "hf_datasets-"
# Streaming
STREAMING_READ_MAX_RETRIES = 20
STREAMING_READ_RETRY_INTERVAL = 5
# Datasets without script
DATA_FILES_MAX_NUMBER_FOR_MODULE_INFERENCE = 200
GLOBBED_DATA_FILES_MAX_NUMBER_FOR_MODULE_INFERENCE = 10
ARCHIVED_DATA_FILES_MAX_NUMBER_FOR_MODULE_INFERENCE = 200
# Progress bars
PBAR_REFRESH_TIME_INTERVAL = 0.05 # 20 progress updates per sec
# Maximum number of uploaded files per commit
UPLOADS_MAX_NUMBER_PER_COMMIT = 50
# Backward compatibiliy
MAX_TABLE_NBYTES_FOR_PICKLING = 4 << 30
| datasets/src/datasets/config.py/0 | {
"file_path": "datasets/src/datasets/config.py",
"repo_id": "datasets",
"token_count": 4285
} |
import os
from functools import partial
from typing import Optional
import fsspec
from fsspec.archive import AbstractArchiveFileSystem
class BaseCompressedFileFileSystem(AbstractArchiveFileSystem):
"""Read contents of compressed file as a filesystem with one file inside."""
root_marker = ""
protocol: str = (
None # protocol passed in prefix to the url. ex: "gzip", for gzip://file.txt::http://foo.bar/file.txt.gz
)
compression: str = None # compression type in fsspec. ex: "gzip"
extension: str = None # extension of the filename to strip. ex: "".gz" to get file.txt from file.txt.gz
def __init__(
self, fo: str = "", target_protocol: Optional[str] = None, target_options: Optional[dict] = None, **kwargs
):
"""
The compressed file system can be instantiated from any compressed file.
It reads the contents of compressed file as a filesystem with one file inside, as if it was an archive.
The single file inside the filesystem is named after the compresssed file,
without the compression extension at the end of the filename.
Args:
fo (:obj:``str``): Path to compressed file. Will fetch file using ``fsspec.open()``
mode (:obj:``str``): Currently, only 'rb' accepted
target_protocol(:obj:``str``, optional): To override the FS protocol inferred from a URL.
target_options (:obj:``dict``, optional): Kwargs passed when instantiating the target FS.
"""
super().__init__(self, **kwargs)
self.fo = fo.__fspath__() if hasattr(fo, "__fspath__") else fo
# always open as "rb" since fsspec can then use the TextIOWrapper to make it work for "r" mode
self._open_with_fsspec = partial(
fsspec.open,
self.fo,
mode="rb",
protocol=target_protocol,
compression=self.compression,
client_kwargs={
"requote_redirect_url": False, # see https://github.com/huggingface/datasets/pull/5459
"trust_env": True, # Enable reading proxy env variables.
**(target_options or {}).pop("client_kwargs", {}), # To avoid issues if it was already passed.
},
**(target_options or {}),
)
self.compressed_name = os.path.basename(self.fo.split("::")[0])
self.uncompressed_name = (
self.compressed_name[: self.compressed_name.rindex(".")]
if "." in self.compressed_name
else self.compressed_name
)
self.dir_cache = None
@classmethod
def _strip_protocol(cls, path):
# compressed file paths are always relative to the archive root
return super()._strip_protocol(path).lstrip("/")
def _get_dirs(self):
if self.dir_cache is None:
f = {**self._open_with_fsspec().fs.info(self.fo), "name": self.uncompressed_name}
self.dir_cache = {f["name"]: f}
def cat(self, path: str):
with self._open_with_fsspec().open() as f:
return f.read()
def _open(
self,
path: str,
mode: str = "rb",
block_size=None,
autocommit=True,
cache_options=None,
**kwargs,
):
path = self._strip_protocol(path)
if mode != "rb":
raise ValueError(f"Tried to read with mode {mode} on file {self.fo} opened with mode 'rb'")
return self._open_with_fsspec().open()
class Bz2FileSystem(BaseCompressedFileFileSystem):
"""Read contents of BZ2 file as a filesystem with one file inside."""
protocol = "bz2"
compression = "bz2"
extension = ".bz2"
class GzipFileSystem(BaseCompressedFileFileSystem):
"""Read contents of GZIP file as a filesystem with one file inside."""
protocol = "gzip"
compression = "gzip"
extension = ".gz"
class Lz4FileSystem(BaseCompressedFileFileSystem):
"""Read contents of LZ4 file as a filesystem with one file inside."""
protocol = "lz4"
compression = "lz4"
extension = ".lz4"
class XzFileSystem(BaseCompressedFileFileSystem):
"""Read contents of .xz (LZMA) file as a filesystem with one file inside."""
protocol = "xz"
compression = "xz"
extension = ".xz"
class ZstdFileSystem(BaseCompressedFileFileSystem):
"""
Read contents of .zstd file as a filesystem with one file inside.
"""
protocol = "zstd"
compression = "zstd"
extension = ".zst"
| datasets/src/datasets/filesystems/compression.py/0 | {
"file_path": "datasets/src/datasets/filesystems/compression.py",
"repo_id": "datasets",
"token_count": 1812
} |
import multiprocessing
import os
from typing import BinaryIO, Optional, Union
import fsspec
from .. import Dataset, Features, NamedSplit, config
from ..formatting import query_table
from ..packaged_modules.json.json import Json
from ..utils import tqdm as hf_tqdm
from ..utils.typing import NestedDataStructureLike, PathLike
from .abc import AbstractDatasetReader
class JsonDatasetReader(AbstractDatasetReader):
def __init__(
self,
path_or_paths: NestedDataStructureLike[PathLike],
split: Optional[NamedSplit] = None,
features: Optional[Features] = None,
cache_dir: str = None,
keep_in_memory: bool = False,
streaming: bool = False,
field: Optional[str] = None,
num_proc: Optional[int] = None,
**kwargs,
):
super().__init__(
path_or_paths,
split=split,
features=features,
cache_dir=cache_dir,
keep_in_memory=keep_in_memory,
streaming=streaming,
num_proc=num_proc,
**kwargs,
)
self.field = field
path_or_paths = path_or_paths if isinstance(path_or_paths, dict) else {self.split: path_or_paths}
self.builder = Json(
cache_dir=cache_dir,
data_files=path_or_paths,
features=features,
field=field,
**kwargs,
)
def read(self):
# Build iterable dataset
if self.streaming:
dataset = self.builder.as_streaming_dataset(split=self.split)
# Build regular (map-style) dataset
else:
download_config = None
download_mode = None
verification_mode = None
base_path = None
self.builder.download_and_prepare(
download_config=download_config,
download_mode=download_mode,
verification_mode=verification_mode,
base_path=base_path,
num_proc=self.num_proc,
)
dataset = self.builder.as_dataset(
split=self.split, verification_mode=verification_mode, in_memory=self.keep_in_memory
)
return dataset
class JsonDatasetWriter:
def __init__(
self,
dataset: Dataset,
path_or_buf: Union[PathLike, BinaryIO],
batch_size: Optional[int] = None,
num_proc: Optional[int] = None,
storage_options: Optional[dict] = None,
**to_json_kwargs,
):
if num_proc is not None and num_proc <= 0:
raise ValueError(f"num_proc {num_proc} must be an integer > 0.")
self.dataset = dataset
self.path_or_buf = path_or_buf
self.batch_size = batch_size if batch_size else config.DEFAULT_MAX_BATCH_SIZE
self.num_proc = num_proc
self.encoding = "utf-8"
self.storage_options = storage_options or {}
self.to_json_kwargs = to_json_kwargs
def write(self) -> int:
_ = self.to_json_kwargs.pop("path_or_buf", None)
orient = self.to_json_kwargs.pop("orient", "records")
lines = self.to_json_kwargs.pop("lines", True if orient == "records" else False)
if "index" not in self.to_json_kwargs and orient in ["split", "table"]:
self.to_json_kwargs["index"] = False
# Determine the default compression value based on self.path_or_buf type
default_compression = "infer" if isinstance(self.path_or_buf, (str, bytes, os.PathLike)) else None
compression = self.to_json_kwargs.pop("compression", default_compression)
if compression not in [None, "infer", "gzip", "bz2", "xz"]:
raise NotImplementedError(f"`datasets` currently does not support {compression} compression")
if not lines and self.batch_size < self.dataset.num_rows:
raise NotImplementedError(
"Output JSON will not be formatted correctly when lines = False and batch_size < number of rows in the dataset. Use pandas.DataFrame.to_json() instead."
)
if isinstance(self.path_or_buf, (str, bytes, os.PathLike)):
with fsspec.open(
self.path_or_buf, "wb", compression=compression, **(self.storage_options or {})
) as buffer:
written = self._write(file_obj=buffer, orient=orient, lines=lines, **self.to_json_kwargs)
else:
if compression:
raise NotImplementedError(
f"The compression parameter is not supported when writing to a buffer, but compression={compression}"
" was passed. Please provide a local path instead."
)
written = self._write(file_obj=self.path_or_buf, orient=orient, lines=lines, **self.to_json_kwargs)
return written
def _batch_json(self, args):
offset, orient, lines, to_json_kwargs = args
batch = query_table(
table=self.dataset.data,
key=slice(offset, offset + self.batch_size),
indices=self.dataset._indices,
)
json_str = batch.to_pandas().to_json(path_or_buf=None, orient=orient, lines=lines, **to_json_kwargs)
if not json_str.endswith("\n"):
json_str += "\n"
return json_str.encode(self.encoding)
def _write(
self,
file_obj: BinaryIO,
orient,
lines,
**to_json_kwargs,
) -> int:
"""Writes the pyarrow table as JSON lines to a binary file handle.
Caller is responsible for opening and closing the handle.
"""
written = 0
if self.num_proc is None or self.num_proc == 1:
for offset in hf_tqdm(
range(0, len(self.dataset), self.batch_size),
unit="ba",
desc="Creating json from Arrow format",
):
json_str = self._batch_json((offset, orient, lines, to_json_kwargs))
written += file_obj.write(json_str)
else:
num_rows, batch_size = len(self.dataset), self.batch_size
with multiprocessing.Pool(self.num_proc) as pool:
for json_str in hf_tqdm(
pool.imap(
self._batch_json,
[(offset, orient, lines, to_json_kwargs) for offset in range(0, num_rows, batch_size)],
),
total=(num_rows // batch_size) + 1 if num_rows % batch_size else num_rows // batch_size,
unit="ba",
desc="Creating json from Arrow format",
):
written += file_obj.write(json_str)
return written
| datasets/src/datasets/io/json.py/0 | {
"file_path": "datasets/src/datasets/io/json.py",
"repo_id": "datasets",
"token_count": 3162
} |
import copy
import os
from functools import partial
from itertools import groupby
from typing import TYPE_CHECKING, Any, Callable, Iterator, List, Optional, Tuple, TypeVar, Union
import numpy as np
import pyarrow as pa
import pyarrow.compute as pc
import pyarrow.types
from .utils.logging import get_logger
if TYPE_CHECKING:
from .features.features import Features, FeatureType
logger = get_logger(__name__)
def inject_arrow_table_documentation(arrow_table_method):
def wrapper(fn):
fn.__doc__ = arrow_table_method.__doc__ + (fn.__doc__ if fn.__doc__ is not None else "")
fn.__doc__ = fn.__doc__.replace("pyarrow.Table", "Table")
if hasattr(arrow_table_method, "__annotations__"):
fn.__annotations__ = arrow_table_method.__annotations__
return fn
return wrapper
def _in_memory_arrow_table_from_file(filename: str) -> pa.Table:
in_memory_stream = pa.input_stream(filename)
opened_stream = pa.ipc.open_stream(in_memory_stream)
pa_table = opened_stream.read_all()
return pa_table
def _in_memory_arrow_table_from_buffer(buffer: pa.Buffer) -> pa.Table:
stream = pa.BufferReader(buffer)
opened_stream = pa.ipc.open_stream(stream)
table = opened_stream.read_all()
return table
def _memory_mapped_record_batch_reader_from_file(filename: str) -> pa.RecordBatchStreamReader:
memory_mapped_stream = pa.memory_map(filename)
return pa.ipc.open_stream(memory_mapped_stream)
def read_schema_from_file(filename: str) -> pa.Schema:
"""
Infer arrow table schema from file without loading whole file into memory.
Usefull especially while having very big files.
"""
with pa.memory_map(filename) as memory_mapped_stream:
schema = pa.ipc.open_stream(memory_mapped_stream).schema
return schema
def _memory_mapped_arrow_table_from_file(filename: str) -> pa.Table:
opened_stream = _memory_mapped_record_batch_reader_from_file(filename)
pa_table = opened_stream.read_all()
return pa_table
def _deepcopy(x, memo: dict):
"""deepcopy a regular class instance"""
cls = x.__class__
result = cls.__new__(cls)
memo[id(x)] = result
for k, v in x.__dict__.items():
setattr(result, k, copy.deepcopy(v, memo))
return result
def _interpolation_search(arr: List[int], x: int) -> int:
"""
Return the position i of a sorted array so that arr[i] <= x < arr[i+1]
Args:
arr (`List[int]`): non-empty sorted list of integers
x (`int`): query
Returns:
`int`: the position i so that arr[i] <= x < arr[i+1]
Raises:
`IndexError`: if the array is empty or if the query is outside the array values
"""
i, j = 0, len(arr) - 1
while i < j and arr[i] <= x < arr[j]:
k = i + ((j - i) * (x - arr[i]) // (arr[j] - arr[i]))
if arr[k] <= x < arr[k + 1]:
return k
elif arr[k] < x:
i, j = k + 1, j
else:
i, j = i, k
raise IndexError(f"Invalid query '{x}' for size {arr[-1] if len(arr) else 'none'}.")
class IndexedTableMixin:
def __init__(self, table: pa.Table):
self._schema: pa.Schema = table.schema
self._batches: List[pa.RecordBatch] = [
recordbatch for recordbatch in table.to_batches() if len(recordbatch) > 0
]
self._offsets: np.ndarray = np.cumsum([0] + [len(b) for b in self._batches], dtype=np.int64)
def fast_gather(self, indices: Union[List[int], np.ndarray]) -> pa.Table:
"""
Create a pa.Table by gathering the records at the records at the specified indices. Should be faster
than pa.concat_tables(table.fast_slice(int(i) % table.num_rows, 1) for i in indices) since NumPy can compute
the binary searches in parallel, highly optimized C
"""
if not len(indices):
raise ValueError("Indices must be non-empty")
batch_indices = np.searchsorted(self._offsets, indices, side="right") - 1
return pa.Table.from_batches(
[
self._batches[batch_idx].slice(i - self._offsets[batch_idx], 1)
for batch_idx, i in zip(batch_indices, indices)
],
schema=self._schema,
)
def fast_slice(self, offset=0, length=None) -> pa.Table:
"""
Slice the Table using interpolation search.
The behavior is the same as `pyarrow.Table.slice` but it's significantly faster.
Interpolation search is used to find the start and end indexes of the batches we want to keep.
The batches to keep are then concatenated to form the sliced Table.
"""
if offset < 0:
raise IndexError("Offset must be non-negative")
elif offset >= self._offsets[-1] or (length is not None and length <= 0):
return pa.Table.from_batches([], schema=self._schema)
i = _interpolation_search(self._offsets, offset)
if length is None or length + offset >= self._offsets[-1]:
batches = self._batches[i:]
batches[0] = batches[0].slice(offset - self._offsets[i])
else:
j = _interpolation_search(self._offsets, offset + length - 1)
batches = self._batches[i : j + 1]
batches[-1] = batches[-1].slice(0, offset + length - self._offsets[j])
batches[0] = batches[0].slice(offset - self._offsets[i])
return pa.Table.from_batches(batches, schema=self._schema)
class Table(IndexedTableMixin):
"""
Wraps a pyarrow Table by using composition.
This is the base class for `InMemoryTable`, `MemoryMappedTable` and `ConcatenationTable`.
It implements all the basic attributes/methods of the pyarrow Table class except
the Table transforms: `slice, filter, flatten, combine_chunks, cast, add_column,
append_column, remove_column, set_column, rename_columns` and `drop`.
The implementation of these methods differs for the subclasses.
"""
def __init__(self, table: pa.Table):
super().__init__(table)
self.table = table
def __deepcopy__(self, memo: dict):
# arrow tables are immutable, so there's no need to copy self.table
# moreover calling deepcopy on a pyarrow table seems to make pa.total_allocated_bytes() decrease for some reason
# by adding it to the memo, self.table won't be copied
memo[id(self.table)] = self.table
# same for the recordbatches used by the index
memo[id(self._batches)] = list(self._batches)
return _deepcopy(self, memo)
def validate(self, *args, **kwargs):
"""
Perform validation checks. An exception is raised if validation fails.
By default only cheap validation checks are run. Pass `full=True`
for thorough validation checks (potentially `O(n)`).
Args:
full (`bool`, defaults to `False`):
If `True`, run expensive checks, otherwise cheap checks only.
Raises:
`pa.lib.ArrowInvalid`: if validation fails
"""
return self.table.validate(*args, **kwargs)
def equals(self, *args, **kwargs):
"""
Check if contents of two tables are equal.
Args:
other ([`~datasets.table.Table`]):
Table to compare against.
check_metadata `bool`, defaults to `False`):
Whether schema metadata equality should be checked as well.
Returns:
`bool`
"""
args = tuple(arg.table if isinstance(arg, Table) else arg for arg in args)
kwargs = {k: v.table if isinstance(v, Table) else v for k, v in kwargs}
return self.table.equals(*args, **kwargs)
def to_batches(self, *args, **kwargs):
"""
Convert Table to list of (contiguous) `RecordBatch` objects.
Args:
max_chunksize (`int`, defaults to `None`):
Maximum size for `RecordBatch` chunks. Individual chunks may be
smaller depending on the chunk layout of individual columns.
Returns:
`List[pyarrow.RecordBatch]`
"""
return self.table.to_batches(*args, **kwargs)
def to_pydict(self, *args, **kwargs):
"""
Convert the Table to a `dict` or `OrderedDict`.
Returns:
`dict`
"""
return self.table.to_pydict(*args, **kwargs)
def to_pylist(self, *args, **kwargs):
"""
Convert the Table to a list
Returns:
`list`
"""
return self.table.to_pylist(*args, **kwargs)
def to_pandas(self, *args, **kwargs):
"""
Convert to a pandas-compatible NumPy array or DataFrame, as appropriate.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
Arrow MemoryPool to use for allocations. Uses the default memory
pool is not passed.
strings_to_categorical (`bool`, defaults to `False`):
Encode string (UTF8) and binary types to `pandas.Categorical`.
categories (`list`, defaults to `empty`):
List of fields that should be returned as `pandas.Categorical`. Only
applies to table-like data structures.
zero_copy_only (`bool`, defaults to `False`):
Raise an `ArrowException` if this function call would require copying
the underlying data.
integer_object_nulls (`bool`, defaults to `False`):
Cast integers with nulls to objects.
date_as_object (`bool`, defaults to `True`):
Cast dates to objects. If `False`, convert to `datetime64[ns]` dtype.
timestamp_as_object (`bool`, defaults to `False`):
Cast non-nanosecond timestamps (`np.datetime64`) to objects. This is
useful if you have timestamps that don't fit in the normal date
range of nanosecond timestamps (1678 CE-2262 CE).
If `False`, all timestamps are converted to `datetime64[ns]` dtype.
use_threads (`bool`, defaults to `True`):
Whether to parallelize the conversion using multiple threads.
deduplicate_objects (`bool`, defaults to `False`):
Do not create multiple copies Python objects when created, to save
on memory use. Conversion will be slower.
ignore_metadata (`bool`, defaults to `False`):
If `True`, do not use the 'pandas' metadata to reconstruct the
DataFrame index, if present.
safe (`bool`, defaults to `True`):
For certain data types, a cast is needed in order to store the
data in a pandas DataFrame or Series (e.g. timestamps are always
stored as nanoseconds in pandas). This option controls whether it
is a safe cast or not.
split_blocks (`bool`, defaults to `False`):
If `True`, generate one internal "block" for each column when
creating a pandas.DataFrame from a `RecordBatch` or `Table`. While this
can temporarily reduce memory note that various pandas operations
can trigger "consolidation" which may balloon memory use.
self_destruct (`bool`, defaults to `False`):
EXPERIMENTAL: If `True`, attempt to deallocate the originating Arrow
memory while converting the Arrow object to pandas. If you use the
object after calling `to_pandas` with this option it will crash your
program.
types_mapper (`function`, defaults to `None`):
A function mapping a pyarrow DataType to a pandas `ExtensionDtype`.
This can be used to override the default pandas type for conversion
of built-in pyarrow types or in absence of `pandas_metadata` in the
Table schema. The function receives a pyarrow DataType and is
expected to return a pandas `ExtensionDtype` or `None` if the
default conversion should be used for that type. If you have
a dictionary mapping, you can pass `dict.get` as function.
Returns:
`pandas.Series` or `pandas.DataFrame`: `pandas.Series` or `pandas.DataFrame` depending on type of object
"""
return self.table.to_pandas(*args, **kwargs)
def to_string(self, *args, **kwargs):
return self.table.to_string(*args, **kwargs)
def to_reader(self, max_chunksize: Optional[int] = None):
"""
Convert the Table to a RecordBatchReader.
Note that this method is zero-copy, it merely exposes the same data under a different API.
Args:
max_chunksize (`int`, defaults to `None`)
Maximum size for RecordBatch chunks. Individual chunks may be smaller depending
on the chunk layout of individual columns.
Returns:
`pyarrow.RecordBatchReader`
"""
return self.table.to_reader(max_chunksize=max_chunksize)
def field(self, *args, **kwargs):
"""
Select a schema field by its column name or numeric index.
Args:
i (`Union[int, str]`):
The index or name of the field to retrieve.
Returns:
`pyarrow.Field`
"""
return self.table.field(*args, **kwargs)
def column(self, *args, **kwargs):
"""
Select a column by its column name, or numeric index.
Args:
i (`Union[int, str]`):
The index or name of the column to retrieve.
Returns:
`pyarrow.ChunkedArray`
"""
return self.table.column(*args, **kwargs)
def itercolumns(self, *args, **kwargs):
"""
Iterator over all columns in their numerical order.
Yields:
`pyarrow.ChunkedArray`
"""
return self.table.itercolumns(*args, **kwargs)
@property
def schema(self):
"""
Schema of the table and its columns.
Returns:
`pyarrow.Schema`
"""
return self.table.schema
@property
def columns(self):
"""
List of all columns in numerical order.
Returns:
`List[pa.ChunkedArray]`
"""
return self.table.columns
@property
def num_columns(self):
"""
Number of columns in this table.
Returns:
int
"""
return self.table.num_columns
@property
def num_rows(self):
"""
Number of rows in this table.
Due to the definition of a table, all columns have the same number of
rows.
Returns:
int
"""
return self.table.num_rows
@property
def shape(self):
"""
Dimensions of the table: (#rows, #columns).
Returns:
`(int, int)`: Number of rows and number of columns.
"""
return self.table.shape
@property
def nbytes(self):
"""
Total number of bytes consumed by the elements of the table.
"""
return self.table.nbytes
@property
def column_names(self):
"""
Names of the table's columns.
"""
return self.table.column_names
def __eq__(self, other):
return self.equals(other)
def __getitem__(self, i):
return self.table[i]
def __len__(self):
return len(self.table)
def __repr__(self):
return self.table.__repr__().replace("pyarrow.Table", self.__class__.__name__)
def __str__(self):
return self.table.__str__().replace("pyarrow.Table", self.__class__.__name__)
def slice(self, *args, **kwargs):
"""
Compute zero-copy slice of this Table.
Args:
offset (`int`, defaults to `0`):
Offset from start of table to slice.
length (`int`, defaults to `None`):
Length of slice (default is until end of table starting from
offset).
Returns:
`datasets.table.Table`
"""
raise NotImplementedError()
def filter(self, *args, **kwargs):
"""
Select records from a Table. See `pyarrow.compute.filter` for full usage.
"""
raise NotImplementedError()
def flatten(self, *args, **kwargs):
"""
Flatten this Table. Each column with a struct type is flattened
into one column per struct field. Other columns are left unchanged.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
raise NotImplementedError()
def combine_chunks(self, *args, **kwargs):
"""
Make a new table by combining the chunks this table has.
All the underlying chunks in the `ChunkedArray` of each column are
concatenated into zero or one chunk.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
raise NotImplementedError()
def cast(self, *args, **kwargs):
"""
Cast table values to another schema.
Args:
target_schema (`Schema`):
Schema to cast to, the names and order of fields must match.
safe (`bool`, defaults to `True`):
Check for overflows or other unsafe conversions.
Returns:
`datasets.table.Table`
"""
raise NotImplementedError()
def replace_schema_metadata(self, *args, **kwargs):
"""
EXPERIMENTAL: Create shallow copy of table by replacing schema
key-value metadata with the indicated new metadata (which may be None,
which deletes any existing metadata
Args:
metadata (`dict`, defaults to `None`):
Returns:
`datasets.table.Table`: shallow_copy
"""
raise NotImplementedError()
def add_column(self, *args, **kwargs):
"""
Add column to Table at position.
A new table is returned with the column added, the original table
object is left unchanged.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`: New table with the passed column added.
"""
raise NotImplementedError()
def append_column(self, *args, **kwargs):
"""
Append column at end of columns.
Args:
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`: New table with the passed column added.
"""
raise NotImplementedError()
def remove_column(self, *args, **kwargs):
"""
Create new Table with the indicated column removed.
Args:
i (`int`):
Index of column to remove.
Returns:
`datasets.table.Table`: New table without the column.
"""
raise NotImplementedError()
def set_column(self, *args, **kwargs):
"""
Replace column in Table at position.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`: New table with the passed column set.
"""
raise NotImplementedError()
def rename_columns(self, *args, **kwargs):
"""
Create new table with columns renamed to provided names.
"""
raise NotImplementedError()
def drop(self, *args, **kwargs):
"""
Drop one or more columns and return a new table.
Args:
columns (`List[str]`):
List of field names referencing existing columns.
Raises:
`KeyError` : if any of the passed columns name are not existing.
Returns:
`datasets.table.Table`: New table without the columns.
"""
raise NotImplementedError()
def select(self, *args, **kwargs):
"""
Select columns of the table.
Returns a new table with the specified columns, and metadata preserved.
Args:
columns (:obj:`Union[List[str], List[int]]`):
The column names or integer indices to select.
Returns:
`datasets.table.Table`: table with only a subset of the columns
"""
raise NotImplementedError()
class TableBlock(Table):
"""
`TableBlock` is the allowed class inside a `ConcanetationTable`.
Only `MemoryMappedTable` and `InMemoryTable` are `TableBlock`.
This is because we don't want a `ConcanetationTable` made out of other `ConcanetationTables`.
"""
pass
class InMemoryTable(TableBlock):
"""
The table is said in-memory when it is loaded into the user's RAM.
Pickling it does copy all the data using memory.
Its implementation is simple and uses the underlying pyarrow Table methods directly.
This is different from the `MemoryMapped` table, for which pickling doesn't copy all the
data in memory. For a `MemoryMapped`, unpickling instead reloads the table from the disk.
`InMemoryTable` must be used when data fit in memory, while `MemoryMapped` are reserved for
data bigger than memory or when you want the memory footprint of your application to
stay low.
"""
@classmethod
def from_file(cls, filename: str):
table = _in_memory_arrow_table_from_file(filename)
return cls(table)
@classmethod
def from_buffer(cls, buffer: pa.Buffer):
table = _in_memory_arrow_table_from_buffer(buffer)
return cls(table)
@classmethod
def from_pandas(cls, *args, **kwargs):
"""
Convert pandas.DataFrame to an Arrow Table.
The column types in the resulting Arrow Table are inferred from the
dtypes of the pandas.Series in the DataFrame. In the case of non-object
Series, the NumPy dtype is translated to its Arrow equivalent. In the
case of `object`, we need to guess the datatype by looking at the
Python objects in this Series.
Be aware that Series of the `object` dtype don't carry enough
information to always lead to a meaningful Arrow type. In the case that
we cannot infer a type, e.g. because the DataFrame is of length 0 or
the Series only contains `None/nan` objects, the type is set to
null. This behavior can be avoided by constructing an explicit schema
and passing it to this function.
Args:
df (`pandas.DataFrame`):
schema (`pyarrow.Schema`, *optional*):
The expected schema of the Arrow Table. This can be used to
indicate the type of columns if we cannot infer it automatically.
If passed, the output will have exactly this schema. Columns
specified in the schema that are not found in the DataFrame columns
or its index will raise an error. Additional columns or index
levels in the DataFrame which are not specified in the schema will
be ignored.
preserve_index (`bool`, *optional*):
Whether to store the index as an additional column in the resulting
`Table`. The default of None will store the index as a column,
except for RangeIndex which is stored as metadata only. Use
`preserve_index=True` to force it to be stored as a column.
nthreads (`int`, defaults to `None` (may use up to system CPU count threads))
If greater than 1, convert columns to Arrow in parallel using
indicated number of threads.
columns (`List[str]`, *optional*):
List of column to be converted. If `None`, use all columns.
safe (`bool`, defaults to `True`):
Check for overflows or other unsafe conversions,
Returns:
`datasets.table.Table`:
Examples:
```python
>>> import pandas as pd
>>> import pyarrow as pa
>>> df = pd.DataFrame({
... 'int': [1, 2],
... 'str': ['a', 'b']
... })
>>> pa.Table.from_pandas(df)
<pyarrow.lib.Table object at 0x7f05d1fb1b40>
```
"""
return cls(pa.Table.from_pandas(*args, **kwargs))
@classmethod
def from_arrays(cls, *args, **kwargs):
"""
Construct a Table from Arrow arrays.
Args:
arrays (`List[Union[pyarrow.Array, pyarrow.ChunkedArray]]`):
Equal-length arrays that should form the table.
names (`List[str]`, *optional*):
Names for the table columns. If not passed, schema must be passed.
schema (`Schema`, defaults to `None`):
Schema for the created table. If not passed, names must be passed.
metadata (`Union[dict, Mapping]`, defaults to `None`):
Optional metadata for the schema (if inferred).
Returns:
`datasets.table.Table`
"""
return cls(pa.Table.from_arrays(*args, **kwargs))
@classmethod
def from_pydict(cls, *args, **kwargs):
"""
Construct a Table from Arrow arrays or columns.
Args:
mapping (`Union[dict, Mapping]`):
A mapping of strings to Arrays or Python lists.
schema (`Schema`, defaults to `None`):
If not passed, will be inferred from the Mapping values
metadata (`Union[dict, Mapping]`, defaults to `None`):
Optional metadata for the schema (if inferred).
Returns:
`datasets.table.Table`
"""
return cls(pa.Table.from_pydict(*args, **kwargs))
@classmethod
def from_pylist(cls, mapping, *args, **kwargs):
"""
Construct a Table from list of rows / dictionaries.
Args:
mapping (`List[dict]`):
A mapping of strings to row values.
schema (`Schema`, defaults to `None`):
If not passed, will be inferred from the Mapping values
metadata (`Union[dict, Mapping]`, defaults to `None`):
Optional metadata for the schema (if inferred).
Returns:
`datasets.table.Table`
"""
return cls(pa.Table.from_pylist(mapping, *args, **kwargs))
@classmethod
def from_batches(cls, *args, **kwargs):
"""
Construct a Table from a sequence or iterator of Arrow `RecordBatches`.
Args:
batches (`Union[Sequence[pyarrow.RecordBatch], Iterator[pyarrow.RecordBatch]]`):
Sequence of `RecordBatch` to be converted, all schemas must be equal.
schema (`Schema`, defaults to `None`):
If not passed, will be inferred from the first `RecordBatch`.
Returns:
`datasets.table.Table`:
"""
return cls(pa.Table.from_batches(*args, **kwargs))
def slice(self, offset=0, length=None):
"""
Compute zero-copy slice of this Table.
Args:
offset (`int`, defaults to `0`):
Offset from start of table to slice.
length (`int`, defaults to `None`):
Length of slice (default is until end of table starting from
offset).
Returns:
`datasets.table.Table`
"""
# Use fast slicing here
return InMemoryTable(self.fast_slice(offset=offset, length=length))
def filter(self, *args, **kwargs):
"""
Select records from a Table. See `pyarrow.compute.filter` for full usage.
"""
return InMemoryTable(self.table.filter(*args, **kwargs))
def flatten(self, *args, **kwargs):
"""
Flatten this Table. Each column with a struct type is flattened
into one column per struct field. Other columns are left unchanged.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
return InMemoryTable(table_flatten(self.table, *args, **kwargs))
def combine_chunks(self, *args, **kwargs):
"""
Make a new table by combining the chunks this table has.
All the underlying chunks in the `ChunkedArray` of each column are
concatenated into zero or one chunk.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
return InMemoryTable(self.table.combine_chunks(*args, **kwargs))
def cast(self, *args, **kwargs):
"""
Cast table values to another schema.
Args:
target_schema (`Schema`):
Schema to cast to, the names and order of fields must match.
safe (`bool`, defaults to `True`):
Check for overflows or other unsafe conversions.
Returns:
`datasets.table.Table`
"""
return InMemoryTable(table_cast(self.table, *args, **kwargs))
def replace_schema_metadata(self, *args, **kwargs):
"""
EXPERIMENTAL: Create shallow copy of table by replacing schema
key-value metadata with the indicated new metadata (which may be `None`,
which deletes any existing metadata).
Args:
metadata (`dict`, defaults to `None`):
Returns:
`datasets.table.Table`: shallow_copy
"""
return InMemoryTable(self.table.replace_schema_metadata(*args, **kwargs))
def add_column(self, *args, **kwargs):
"""
Add column to Table at position.
A new table is returned with the column added, the original table
object is left unchanged.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`: New table with the passed column added.
"""
return InMemoryTable(self.table.add_column(*args, **kwargs))
def append_column(self, *args, **kwargs):
"""
Append column at end of columns.
Args:
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`:
New table with the passed column added.
"""
return InMemoryTable(self.table.append_column(*args, **kwargs))
def remove_column(self, *args, **kwargs):
"""
Create new Table with the indicated column removed.
Args:
i (`int`):
Index of column to remove.
Returns:
`datasets.table.Table`:
New table without the column.
"""
return InMemoryTable(self.table.remove_column(*args, **kwargs))
def set_column(self, *args, **kwargs):
"""
Replace column in Table at position.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`:
New table with the passed column set.
"""
return InMemoryTable(self.table.set_column(*args, **kwargs))
def rename_columns(self, *args, **kwargs):
"""
Create new table with columns renamed to provided names.
"""
return InMemoryTable(self.table.rename_columns(*args, **kwargs))
def drop(self, *args, **kwargs):
"""
Drop one or more columns and return a new table.
Args:
columns (`List[str]`):
List of field names referencing existing columns.
Raises:
`KeyError` : if any of the passed columns name are not existing.
Returns:
`datasets.table.Table`:
New table without the columns.
"""
return InMemoryTable(self.table.drop(*args, **kwargs))
def select(self, *args, **kwargs):
"""
Select columns of the table.
Returns a new table with the specified columns, and metadata preserved.
Args:
columns (:obj:`Union[List[str], List[int]]`):
The column names or integer indices to select.
Returns:
:class:`datasets.table.Table`: New table with the specified columns, and metadata preserved.
"""
return InMemoryTable(self.table.select(*args, **kwargs))
# The MemoryMappedTable needs replays to properly reload tables from the disk
Replay = Tuple[str, tuple, dict]
class MemoryMappedTable(TableBlock):
"""
The table is said memory mapped when it doesn't use the user's RAM but loads the data
from the disk instead.
Pickling it doesn't copy the data into memory.
Instead, only the path to the memory mapped arrow file is pickled, as well as the list
of transforms to "replay" when reloading the table from the disk.
Its implementation requires to store an history of all the transforms that were applied
to the underlying pyarrow Table, so that they can be "replayed" when reloading the Table
from the disk.
This is different from the `InMemoryTable` table, for which pickling does copy all the
data in memory.
`InMemoryTable` must be used when data fit in memory, while `MemoryMapped` are reserved for
data bigger than memory or when you want the memory footprint of your application to
stay low.
"""
def __init__(self, table: pa.Table, path: str, replays: Optional[List[Replay]] = None):
super().__init__(table)
self.path = os.path.abspath(path)
self.replays: List[Replay] = replays if replays is not None else []
@classmethod
def from_file(cls, filename: str, replays=None):
table = _memory_mapped_arrow_table_from_file(filename)
table = cls._apply_replays(table, replays)
return cls(table, filename, replays)
def __getstate__(self):
return {"path": self.path, "replays": self.replays}
def __setstate__(self, state):
path = state["path"]
replays = state["replays"]
table = _memory_mapped_arrow_table_from_file(path)
table = self._apply_replays(table, replays)
MemoryMappedTable.__init__(self, table, path=path, replays=replays)
@staticmethod
def _apply_replays(table: pa.Table, replays: Optional[List[Replay]] = None) -> pa.Table:
if replays is not None:
for name, args, kwargs in replays:
if name == "cast":
table = table_cast(table, *args, **kwargs)
elif name == "flatten":
table = table_flatten(table, *args, **kwargs)
else:
table = getattr(table, name)(*args, **kwargs)
return table
def _append_replay(self, replay: Replay) -> List[Replay]:
replays = copy.deepcopy(self.replays)
replays.append(replay)
return replays
def slice(self, offset=0, length=None):
"""
Compute zero-copy slice of this Table.
Args:
offset (`int`, defaults to `0`):
Offset from start of table to slice.
length (`int`, defaults to `None`):
Length of slice (default is until end of table starting from
offset).
Returns:
`datasets.table.Table`
"""
replay = ("slice", (offset, length), {})
replays = self._append_replay(replay)
# Use fast slicing here
return MemoryMappedTable(self.fast_slice(offset=offset, length=length), self.path, replays)
def filter(self, *args, **kwargs):
"""
Select records from a Table. See `pyarrow.compute.filter` for full usage.
"""
replay = ("filter", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.filter(*args, **kwargs), self.path, replays)
def flatten(self, *args, **kwargs):
"""
Flatten this Table. Each column with a struct type is flattened
into one column per struct field. Other columns are left unchanged.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
replay = ("flatten", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(table_flatten(self.table, *args, **kwargs), self.path, replays)
def combine_chunks(self, *args, **kwargs):
"""
Make a new table by combining the chunks this table has.
All the underlying chunks in the ChunkedArray of each column are
concatenated into zero or one chunk.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
replay = ("combine_chunks", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.combine_chunks(*args, **kwargs), self.path, replays)
def cast(self, *args, **kwargs):
"""
Cast table values to another schema
Args:
target_schema (`Schema`):
Schema to cast to, the names and order of fields must match.
safe (`bool`, defaults to `True`):
Check for overflows or other unsafe conversions.
Returns:
`datasets.table.Table`
"""
replay = ("cast", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(table_cast(self.table, *args, **kwargs), self.path, replays)
def replace_schema_metadata(self, *args, **kwargs):
"""
EXPERIMENTAL: Create shallow copy of table by replacing schema
key-value metadata with the indicated new metadata (which may be None,
which deletes any existing metadata.
Args:
metadata (`dict`, defaults to `None`):
Returns:
`datasets.table.Table`: shallow_copy
"""
replay = ("replace_schema_metadata", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.replace_schema_metadata(*args, **kwargs), self.path, replays)
def add_column(self, *args, **kwargs):
"""
Add column to Table at position.
A new table is returned with the column added, the original table
object is left unchanged.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`: New table with the passed column added.
"""
replay = ("add_column", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.add_column(*args, **kwargs), self.path, replays)
def append_column(self, *args, **kwargs):
"""
Append column at end of columns.
Args:
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`:
New table with the passed column added.
"""
replay = ("append_column", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.append_column(*args, **kwargs), self.path, replays)
def remove_column(self, *args, **kwargs):
"""
Create new Table with the indicated column removed.
Args:
i (`int`):
Index of column to remove.
Returns:
`datasets.table.Table`:
New table without the column.
"""
replay = ("remove_column", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.remove_column(*args, **kwargs), self.path, replays)
def set_column(self, *args, **kwargs):
"""
Replace column in Table at position.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`:
New table with the passed column set.
"""
replay = ("set_column", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.set_column(*args, **kwargs), self.path, replays)
def rename_columns(self, *args, **kwargs):
"""
Create new table with columns renamed to provided names.
"""
replay = ("rename_columns", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.rename_columns(*args, **kwargs), self.path, replays)
def drop(self, *args, **kwargs):
"""
Drop one or more columns and return a new table.
Args:
columns (`List[str]`):
List of field names referencing existing columns.
Raises:
`KeyError` : if any of the passed columns name are not existing.
Returns:
`datasets.table.Table`:
New table without the columns.
"""
replay = ("drop", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.drop(*args, **kwargs), self.path, replays)
def select(self, *args, **kwargs):
"""
Select columns of the table.
Returns a new table with the specified columns, and metadata preserved.
Args:
columns (:obj:`Union[List[str], List[int]]`):
The column names or integer indices to select.
Returns:
:class:`datasets.table.Table`: New table with the specified columns, and metadata preserved.
"""
replay = ("select", copy.deepcopy(args), copy.deepcopy(kwargs))
replays = self._append_replay(replay)
return MemoryMappedTable(self.table.select(*args, **kwargs), self.path, replays)
# A ConcatenationTable is the concatenation of several tables.
# The ``blocks`` attributes stores a list of list of blocks.
# The first axis concatenates the tables along the axis 0 (it appends rows),
# while the second axis concatenates tables along the axis 1 (it appends columns).
TableBlockContainer = TypeVar("TableBlockContainer", TableBlock, List[TableBlock], List[List[TableBlock]])
class ConcatenationTable(Table):
"""
The table comes from the concatenation of several tables called blocks.
It enables concatenation on both axis 0 (append rows) and axis 1 (append columns).
The underlying tables are called "blocks" and can be either `InMemoryTable`
or `MemoryMappedTable` objects.
This allows to combine tables that come from memory or that are memory mapped.
When a `ConcatenationTable` is pickled, then each block is pickled:
- the `InMemoryTable` objects are pickled by copying all the data in memory.
- the MemoryMappedTable objects are pickled without copying the data into memory.
Instead, only the path to the memory mapped arrow file is pickled, as well as the list
of transforms to "replays" when reloading the table from the disk.
Its implementation requires to store each block separately.
The `blocks` attributes stores a list of list of blocks.
The first axis concatenates the tables along the axis 0 (it appends rows),
while the second axis concatenates tables along the axis 1 (it appends columns).
If some columns are missing when concatenating on axis 0, they are filled with null values.
This is done using `pyarrow.concat_tables(tables, promote=True)`.
You can access the fully combined table by accessing the `ConcatenationTable.table` attribute,
and the blocks by accessing the `ConcatenationTable.blocks` attribute.
"""
def __init__(self, table: pa.Table, blocks: List[List[TableBlock]]):
super().__init__(table)
self.blocks = blocks
# Check that all the blocks have the right type.
# Only InMemoryTable and MemoryMappedTable are allowed.
for subtables in blocks:
for subtable in subtables:
if not isinstance(subtable, TableBlock):
raise TypeError(
"The blocks of a ConcatenationTable must be InMemoryTable or MemoryMappedTable objects"
f", but got {_short_str(subtable)}."
)
def __getstate__(self):
return {"blocks": self.blocks, "schema": self.table.schema}
def __setstate__(self, state):
blocks = state["blocks"]
schema = state["schema"]
table = self._concat_blocks_horizontally_and_vertically(blocks)
if schema is not None and table.schema != schema:
# We fix the columns by concatenating with an empty table with the right columns
empty_table = pa.Table.from_batches([], schema=schema)
# We set promote_options="default" to fill missing columns with null values
table = pa.concat_tables([table, empty_table], promote_options="default")
ConcatenationTable.__init__(self, table, blocks=blocks)
@staticmethod
def _concat_blocks(blocks: List[Union[TableBlock, pa.Table]], axis: int = 0) -> pa.Table:
pa_tables = [table.table if hasattr(table, "table") else table for table in blocks]
if axis == 0:
# We set promote_options="default" to fill missing columns with null values
return pa.concat_tables(pa_tables, promote_options="default")
elif axis == 1:
for i, table in enumerate(pa_tables):
if i == 0:
pa_table = table
else:
for name, col in zip(table.column_names, table.columns):
pa_table = pa_table.append_column(name, col)
return pa_table
else:
raise ValueError("'axis' must be either 0 or 1")
@classmethod
def _concat_blocks_horizontally_and_vertically(cls, blocks: List[List[TableBlock]]) -> pa.Table:
pa_tables_to_concat_vertically = []
for i, tables in enumerate(blocks):
if not tables:
continue
pa_table_horizontally_concatenated = cls._concat_blocks(tables, axis=1)
pa_tables_to_concat_vertically.append(pa_table_horizontally_concatenated)
return cls._concat_blocks(pa_tables_to_concat_vertically, axis=0)
@classmethod
def _merge_blocks(cls, blocks: TableBlockContainer, axis: Optional[int] = None) -> TableBlockContainer:
if axis is not None:
merged_blocks = []
for is_in_memory, block_group in groupby(blocks, key=lambda x: isinstance(x, InMemoryTable)):
if is_in_memory:
block_group = [InMemoryTable(cls._concat_blocks(list(block_group), axis=axis))]
merged_blocks += list(block_group)
else: # both
merged_blocks = [cls._merge_blocks(row_block, axis=1) for row_block in blocks]
if all(len(row_block) == 1 for row_block in merged_blocks):
merged_blocks = cls._merge_blocks(
[block for row_block in merged_blocks for block in row_block], axis=0
)
return merged_blocks
@classmethod
def _consolidate_blocks(cls, blocks: TableBlockContainer) -> TableBlockContainer:
if isinstance(blocks, TableBlock):
return blocks
elif isinstance(blocks[0], TableBlock):
return cls._merge_blocks(blocks, axis=0)
else:
return cls._merge_blocks(blocks)
@classmethod
def from_blocks(cls, blocks: TableBlockContainer) -> "ConcatenationTable":
blocks = cls._consolidate_blocks(blocks)
if isinstance(blocks, TableBlock):
table = blocks
return cls(table.table, [[table]])
elif isinstance(blocks[0], TableBlock):
table = cls._concat_blocks(blocks, axis=0)
blocks = [[t] for t in blocks]
return cls(table, blocks)
else:
table = cls._concat_blocks_horizontally_and_vertically(blocks)
return cls(table, blocks)
@classmethod
def from_tables(cls, tables: List[Union[pa.Table, Table]], axis: int = 0) -> "ConcatenationTable":
"""Create `ConcatenationTable` from list of tables.
Args:
tables (list of `Table` or list of `pyarrow.Table`):
List of tables.
axis (`{0, 1}`, defaults to `0`, meaning over rows):
Axis to concatenate over, where `0` means over rows (vertically) and `1` means over columns
(horizontally).
<Added version="1.6.0"/>
"""
def to_blocks(table: Union[pa.Table, Table]) -> List[List[TableBlock]]:
if isinstance(table, pa.Table):
return [[InMemoryTable(table)]]
elif isinstance(table, ConcatenationTable):
return copy.deepcopy(table.blocks)
else:
return [[table]]
def _slice_row_block(row_block: List[TableBlock], length: int) -> Tuple[List[TableBlock], List[TableBlock]]:
sliced = [table.slice(0, length) for table in row_block]
remainder = [table.slice(length, len(row_block[0]) - length) for table in row_block]
return sliced, remainder
def _split_both_like(
result: List[List[TableBlock]], blocks: List[List[TableBlock]]
) -> Tuple[List[List[TableBlock]], List[List[TableBlock]]]:
"""
Make sure each row_block contain the same num_rows to be able to concatenate them on axis=1.
To do so, we modify both blocks sets to have the same row_blocks boundaries.
For example, if `result` has 2 row_blocks of 3 rows and `blocks` has 3 row_blocks of 2 rows,
we modify both to have 4 row_blocks of size 2, 1, 1 and 2:
[ x x x | x x x ]
+ [ y y | y y | y y ]
-----------------------------
= [ x x | x | x | x x ]
[ y y | y | y | y y ]
"""
result, blocks = list(result), list(blocks)
new_result, new_blocks = [], []
while result and blocks:
# we slice the longest row block to save two row blocks of same length
# and we replace the long row block by its remainder if necessary
if len(result[0][0]) > len(blocks[0][0]):
new_blocks.append(blocks[0])
sliced, result[0] = _slice_row_block(result[0], len(blocks.pop(0)[0]))
new_result.append(sliced)
elif len(result[0][0]) < len(blocks[0][0]):
new_result.append(result[0])
sliced, blocks[0] = _slice_row_block(blocks[0], len(result.pop(0)[0]))
new_blocks.append(sliced)
else:
new_result.append(result.pop(0))
new_blocks.append(blocks.pop(0))
if result or blocks:
raise ValueError("Failed to concatenate on axis=1 because tables don't have the same number of rows")
return new_result, new_blocks
def _extend_blocks(
result: List[List[TableBlock]], blocks: List[List[TableBlock]], axis: int = 0
) -> List[List[TableBlock]]:
if axis == 0:
result.extend(blocks)
elif axis == 1:
# We make sure each row_block have the same num_rows
result, blocks = _split_both_like(result, blocks)
for i, row_block in enumerate(blocks):
result[i].extend(row_block)
return result
blocks = to_blocks(tables[0])
for table in tables[1:]:
table_blocks = to_blocks(table)
blocks = _extend_blocks(blocks, table_blocks, axis=axis)
return cls.from_blocks(blocks)
@property
def _slices(self):
offset = 0
for tables in self.blocks:
length = len(tables[0])
yield (offset, length)
offset += length
def slice(self, offset=0, length=None):
"""
Compute zero-copy slice of this Table.
Args:
offset (`int`, defaults to `0`):
Offset from start of table to slice.
length (`int`, defaults to `None`):
Length of slice (default is until end of table starting from
offset).
Returns:
`datasets.table.Table`
"""
table = self.table.slice(offset, length=length)
length = length if length is not None else self.num_rows - offset
blocks = []
for tables in self.blocks:
n_rows = len(tables[0])
if length == 0:
break
elif n_rows <= offset:
offset = offset - n_rows
elif n_rows <= offset + length:
blocks.append([t.slice(offset) for t in tables])
length, offset = length + offset - n_rows, 0
else:
blocks.append([t.slice(offset, length) for t in tables])
length, offset = 0, 0
return ConcatenationTable(table, blocks)
def filter(self, mask, *args, **kwargs):
"""
Select records from a Table. See `pyarrow.compute.filter` for full usage.
"""
table = self.table.filter(mask, *args, **kwargs)
blocks = []
for (offset, length), tables in zip(self._slices, self.blocks):
submask = mask.slice(offset, length)
blocks.append([t.filter(submask, *args, **kwargs) for t in tables])
return ConcatenationTable(table, blocks)
def flatten(self, *args, **kwargs):
"""
Flatten this Table. Each column with a struct type is flattened
into one column per struct field. Other columns are left unchanged.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
table = table_flatten(self.table, *args, **kwargs)
blocks = []
for tables in self.blocks:
blocks.append([t.flatten(*args, **kwargs) for t in tables])
return ConcatenationTable(table, blocks)
def combine_chunks(self, *args, **kwargs):
"""
Make a new table by combining the chunks this table has.
All the underlying chunks in the `ChunkedArray` of each column are
concatenated into zero or one chunk.
Args:
memory_pool (`MemoryPool`, defaults to `None`):
For memory allocations, if required, otherwise use default pool.
Returns:
`datasets.table.Table`
"""
table = self.table.combine_chunks(*args, **kwargs)
blocks = []
for tables in self.blocks:
blocks.append([t.combine_chunks(*args, **kwargs) for t in tables])
return ConcatenationTable(table, blocks)
def cast(self, target_schema, *args, **kwargs):
"""
Cast table values to another schema.
Args:
target_schema (`Schema`):
Schema to cast to, the names and order of fields must match.
safe (`bool`, defaults to `True`):
Check for overflows or other unsafe conversions.
Returns:
`datasets.table.Table`
"""
from .features import Features
table = table_cast(self.table, target_schema, *args, **kwargs)
target_features = Features.from_arrow_schema(target_schema)
blocks = []
for subtables in self.blocks:
new_tables = []
fields = list(target_schema)
for subtable in subtables:
subfields = []
for name in subtable.column_names:
subfields.append(fields.pop(next(i for i, field in enumerate(fields) if field.name == name)))
subfeatures = Features({subfield.name: target_features[subfield.name] for subfield in subfields})
subschema = subfeatures.arrow_schema
new_tables.append(subtable.cast(subschema, *args, **kwargs))
blocks.append(new_tables)
return ConcatenationTable(table, blocks)
def replace_schema_metadata(self, *args, **kwargs):
"""
EXPERIMENTAL: Create shallow copy of table by replacing schema
key-value metadata with the indicated new metadata (which may be `None`,
which deletes any existing metadata).
Args:
metadata (`dict`, defaults to `None`):
Returns:
`datasets.table.Table`: shallow_copy
"""
table = self.table.replace_schema_metadata(*args, **kwargs)
blocks = []
for tables in self.blocks:
blocks.append([t.replace_schema_metadata(*args, **kwargs) for t in tables])
return ConcatenationTable(table, self.blocks)
def add_column(self, *args, **kwargs):
"""
Add column to Table at position.
A new table is returned with the column added, the original table
object is left unchanged.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`: New table with the passed column added.
"""
raise NotImplementedError()
def append_column(self, *args, **kwargs):
"""
Append column at end of columns.
Args:
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`:
New table with the passed column added.
"""
raise NotImplementedError()
def remove_column(self, i, *args, **kwargs):
"""
Create new Table with the indicated column removed.
Args:
i (`int`):
Index of column to remove.
Returns:
`datasets.table.Table`:
New table without the column.
"""
table = self.table.remove_column(i, *args, **kwargs)
name = self.table.column_names[i]
blocks = []
for tables in self.blocks:
blocks.append(
[
t.remove_column(t.column_names.index(name), *args, **kwargs) if name in t.column_names else t
for t in tables
]
)
return ConcatenationTable(table, blocks)
def set_column(self, *args, **kwargs):
"""
Replace column in Table at position.
Args:
i (`int`):
Index to place the column at.
field_ (`Union[str, pyarrow.Field]`):
If a string is passed then the type is deduced from the column
data.
column (`Union[pyarrow.Array, List[pyarrow.Array]]`):
Column data.
Returns:
`datasets.table.Table`:
New table with the passed column set.
"""
raise NotImplementedError()
def rename_columns(self, names, *args, **kwargs):
"""
Create new table with columns renamed to provided names.
"""
table = self.table.rename_columns(names, *args, **kwargs)
names = dict(zip(self.table.column_names, names))
blocks = []
for tables in self.blocks:
blocks.append(
[t.rename_columns([names[name] for name in t.column_names], *args, **kwargs) for t in tables]
)
return ConcatenationTable(table, blocks)
def drop(self, columns, *args, **kwargs):
"""
Drop one or more columns and return a new table.
Args:
columns (`List[str]`):
List of field names referencing existing columns.
Raises:
`KeyError` : if any of the passed columns name are not existing.
Returns:
`datasets.table.Table`:
New table without the columns.
"""
table = self.table.drop(columns, *args, **kwargs)
blocks = []
for tables in self.blocks:
blocks.append([t.drop([c for c in columns if c in t.column_names], *args, **kwargs) for t in tables])
return ConcatenationTable(table, blocks)
def select(self, columns, *args, **kwargs):
"""
Select columns of the table.
Returns a new table with the specified columns, and metadata preserved.
Args:
columns (:obj:`Union[List[str], List[int]]`):
The column names or integer indices to select.
Returns:
:class:`datasets.table.Table`: New table with the specified columns, and metadata preserved.
"""
table = self.table.select(columns, *args, **kwargs)
blocks = []
for tables in self.blocks:
blocks.append([t.select([c for c in columns if c in t.column_names], *args, **kwargs) for t in tables])
return ConcatenationTable(table, blocks)
def concat_tables(tables: List[Table], axis: int = 0) -> Table:
"""
Concatenate tables.
Args:
tables (list of `Table`):
List of tables to be concatenated.
axis (`{0, 1}`, defaults to `0`, meaning over rows):
Axis to concatenate over, where `0` means over rows (vertically) and `1` means over columns
(horizontally).
<Added version="1.6.0"/>
Returns:
`datasets.table.Table`:
If the number of input tables is > 1, then the returned table is a `datasets.table.ConcatenationTable`.
Otherwise if there's only one table, it is returned as is.
"""
tables = list(tables)
if len(tables) == 1:
return tables[0]
return ConcatenationTable.from_tables(tables, axis=axis)
def list_table_cache_files(table: Table) -> List[str]:
"""
Get the cache files that are loaded by the table.
Cache file are used when parts of the table come from the disk via memory mapping.
Returns:
`List[str]`:
A list of paths to the cache files loaded by the table.
"""
if isinstance(table, ConcatenationTable):
cache_files = []
for subtables in table.blocks:
for subtable in subtables:
cache_files += list_table_cache_files(subtable)
return cache_files
elif isinstance(table, MemoryMappedTable):
return [table.path]
else:
return []
def _wrap_for_chunked_arrays(func):
"""Apply the function on each chunk of a `pyarrow.ChunkedArray`, or on the array directly"""
def wrapper(array, *args, **kwargs):
if isinstance(array, pa.ChunkedArray):
return pa.chunked_array([func(chunk, *args, **kwargs) for chunk in array.chunks])
else:
return func(array, *args, **kwargs)
return wrapper
def _are_list_values_of_length(array: pa.ListArray, length: int) -> bool:
"""Check if all the sub-lists of a `pa.ListArray` have the specified length."""
return pc.all(pc.equal(array.value_lengths(), length)).as_py() or array.null_count == len(array)
def _combine_list_array_offsets_with_mask(array: pa.ListArray) -> pa.Array:
"""Add the null bitmap to the offsets of a `pa.ListArray`."""
offsets = array.offsets
if array.null_count > 0:
offsets = pa.concat_arrays(
[
pc.replace_with_mask(offsets[:-1], array.is_null(), pa.nulls(len(array), pa.int32())),
offsets[-1:],
]
)
return offsets
def _storage_type(type: pa.DataType) -> pa.DataType:
"""Convert a (possibly nested) `pa.ExtensionType` to its storage type."""
if isinstance(type, pa.ExtensionType):
return _storage_type(type.storage_type)
elif isinstance(type, pa.StructType):
return pa.struct([pa.field(field.name, _storage_type(field.type)) for field in type])
elif isinstance(type, pa.ListType):
return pa.list_(_storage_type(type.value_type))
elif isinstance(type, pa.FixedSizeListType):
return pa.list_(_storage_type(type.value_type), type.list_size)
return type
def _short_str(value: Any) -> str:
out = str(value)
if len(out) > 3000:
out = out[:1500] + "\n...\n" + out[-1500:]
return out
@_wrap_for_chunked_arrays
def array_cast(
array: pa.Array, pa_type: pa.DataType, allow_primitive_to_str: bool = True, allow_decimal_to_str: bool = True
) -> Union[pa.Array, pa.FixedSizeListArray, pa.ListArray, pa.StructArray, pa.ExtensionArray]:
"""Improved version of `pa.Array.cast`
It supports casting `pa.StructArray` objects to re-order the fields.
It also let you control certain aspects of the casting, e.g. whether
to disable casting primitives (`booleans`, `floats` or `ints`) or
disable casting decimals to strings.
Args:
array (`pa.Array`):
PyArrow array to cast
pa_type (`pa.DataType`):
Target PyArrow type
allow_primitive_to_str (`bool`, defaults to `True`):
Whether to allow casting primitives to strings.
Defaults to `True`.
allow_decimal_to_str (`bool`, defaults to `True`):
Whether to allow casting decimals to strings.
Defaults to `True`.
Raises:
`pa.ArrowInvalidError`: if the arrow data casting fails
`TypeError`: if the target type is not supported according, e.g.
- if a field is missing
- if casting from primitives to strings and `allow_primitive_to_str` is `False`
- if casting from decimals to strings and `allow_decimal_to_str` is `False`
Returns:
`List[pyarrow.Array]`: the casted array
"""
_c = partial(array_cast, allow_primitive_to_str=allow_primitive_to_str, allow_decimal_to_str=allow_decimal_to_str)
if isinstance(array, pa.ExtensionArray):
array = array.storage
if isinstance(pa_type, pa.ExtensionType):
return pa_type.wrap_array(_c(array, pa_type.storage_type))
elif array.type == pa_type:
return array
elif pa.types.is_struct(array.type):
if pa.types.is_struct(pa_type) and ({field.name for field in pa_type} == {field.name for field in array.type}):
if array.type.num_fields == 0:
return array
arrays = [_c(array.field(field.name), field.type) for field in pa_type]
return pa.StructArray.from_arrays(arrays, fields=list(pa_type), mask=array.is_null())
elif pa.types.is_list(array.type) or pa.types.is_large_list(array.type):
if pa.types.is_fixed_size_list(pa_type):
if _are_list_values_of_length(array, pa_type.list_size):
if array.null_count > 0:
# Ensure each null value in the array translates to [null] * pa_type.list_size in the array's values array
array_type = array.type
storage_type = _storage_type(array_type)
if array_type != storage_type:
# Temporarily convert to the storage type to support extension types in the slice operation
array = _c(array, storage_type)
array = pc.list_slice(array, 0, pa_type.list_size, return_fixed_size_list=True)
array = _c(array, array_type)
else:
array = pc.list_slice(array, 0, pa_type.list_size, return_fixed_size_list=True)
array_values = array.values
return pa.FixedSizeListArray.from_arrays(
_c(array_values, pa_type.value_type), pa_type.list_size, mask=array.is_null()
)
else:
array_values = array.values[
array.offset * pa_type.list_size : (array.offset + len(array)) * pa_type.list_size
]
return pa.FixedSizeListArray.from_arrays(_c(array_values, pa_type.value_type), pa_type.list_size)
elif pa.types.is_list(pa_type):
# Merge offsets with the null bitmap to avoid the "Null bitmap with offsets slice not supported" ArrowNotImplementedError
array_offsets = _combine_list_array_offsets_with_mask(array)
return pa.ListArray.from_arrays(array_offsets, _c(array.values, pa_type.value_type))
elif pa.types.is_large_list(pa_type):
# Merge offsets with the null bitmap to avoid the "Null bitmap with offsets slice not supported" ArrowNotImplementedError
array_offsets = _combine_list_array_offsets_with_mask(array)
return pa.LargeListArray.from_arrays(array_offsets, _c(array.values, pa_type.value_type))
elif pa.types.is_fixed_size_list(array.type):
if pa.types.is_fixed_size_list(pa_type):
if pa_type.list_size == array.type.list_size:
array_values = array.values[
array.offset * array.type.list_size : (array.offset + len(array)) * array.type.list_size
]
return pa.FixedSizeListArray.from_arrays(
_c(array_values, pa_type.value_type), pa_type.list_size, mask=array.is_null()
)
elif pa.types.is_list(pa_type):
array_offsets = (np.arange(len(array) + 1) + array.offset) * array.type.list_size
return pa.ListArray.from_arrays(array_offsets, _c(array.values, pa_type.value_type), mask=array.is_null())
elif pa.types.is_large_list(pa_type):
array_offsets = (np.arange(len(array) + 1) + array.offset) * array.type.list_size
return pa.LargeListArray.from_arrays(
array_offsets, _c(array.values, pa_type.value_type), mask=array.is_null()
)
else:
if pa.types.is_string(pa_type):
if not allow_primitive_to_str and pa.types.is_primitive(array.type):
raise TypeError(
f"Couldn't cast array of type {_short_str(array.type)} to {_short_str(pa_type)} "
f"since allow_primitive_to_str is set to {allow_primitive_to_str} "
)
if not allow_decimal_to_str and pa.types.is_decimal(array.type):
raise TypeError(
f"Couldn't cast array of type {_short_str(array.type)} to {_short_str(pa_type)} "
f"and allow_decimal_to_str is set to {allow_decimal_to_str}"
)
if pa.types.is_null(pa_type) and not pa.types.is_null(array.type):
raise TypeError(f"Couldn't cast array of type {_short_str(array.type)} to {_short_str(pa_type)}")
return array.cast(pa_type)
raise TypeError(f"Couldn't cast array of type {_short_str(array.type)} to {_short_str(pa_type)}")
@_wrap_for_chunked_arrays
def cast_array_to_feature(
array: pa.Array, feature: "FeatureType", allow_primitive_to_str: bool = True, allow_decimal_to_str: bool = True
) -> pa.Array:
"""Cast an array to the arrow type that corresponds to the requested feature type.
For custom features like [`Audio`] or [`Image`], it takes into account the "cast_storage" methods
they defined to enable casting from other arrow types.
Args:
array (`pa.Array`):
The PyArrow array to cast.
feature (`datasets.features.FeatureType`):
The target feature type.
allow_primitive_to_str (`bool`, defaults to `True`):
Whether to allow casting primitives to strings.
Defaults to `True`.
allow_decimal_to_str (`bool`, defaults to `True`):
Whether to allow casting decimals to strings.
Defaults to `True`.
Raises:
`pa.ArrowInvalidError`: if the arrow data casting fails
`TypeError`: if the target type is not supported according, e.g.
- if a field is missing
- if casting from primitives and `allow_primitive_to_str` is `False`
- if casting from decimals and `allow_decimal_to_str` is `False`
Returns:
array (`pyarrow.Array`): the casted array
"""
from .features.features import LargeList, Sequence, get_nested_type
_c = partial(
cast_array_to_feature,
allow_primitive_to_str=allow_primitive_to_str,
allow_decimal_to_str=allow_decimal_to_str,
)
if isinstance(array, pa.ExtensionArray):
array = array.storage
if hasattr(feature, "cast_storage"):
return feature.cast_storage(array)
elif pa.types.is_struct(array.type):
# feature must be a dict or Sequence(subfeatures_dict)
if isinstance(feature, Sequence) and isinstance(feature.feature, dict):
sequence_kwargs = vars(feature).copy()
feature = sequence_kwargs.pop("feature")
feature = {name: Sequence(subfeature, **sequence_kwargs) for name, subfeature in feature.items()}
if isinstance(feature, dict) and (array_fields := {field.name for field in array.type}) <= set(feature):
null_array = pa.array([None] * len(array))
arrays = [
_c(array.field(name) if name in array_fields else null_array, subfeature)
for name, subfeature in feature.items()
]
return pa.StructArray.from_arrays(arrays, names=list(feature), mask=array.is_null())
elif pa.types.is_list(array.type) or pa.types.is_large_list(array.type):
# feature must be either [subfeature] or LargeList(subfeature) or Sequence(subfeature)
if isinstance(feature, list):
casted_array_values = _c(array.values, feature[0])
if pa.types.is_list(array.type) and casted_array_values.type == array.values.type:
# Both array and feature have equal list type and values (within the list) type
return array
else:
# Merge offsets with the null bitmap to avoid the "Null bitmap with offsets slice not supported" ArrowNotImplementedError
array_offsets = _combine_list_array_offsets_with_mask(array)
return pa.ListArray.from_arrays(array_offsets, casted_array_values)
elif isinstance(feature, LargeList):
casted_array_values = _c(array.values, feature.feature)
if pa.types.is_large_list(array.type) and casted_array_values.type == array.values.type:
# Both array and feature have equal large_list type and values (within the list) type
return array
else:
# Merge offsets with the null bitmap to avoid the "Null bitmap with offsets slice not supported" ArrowNotImplementedError
array_offsets = _combine_list_array_offsets_with_mask(array)
return pa.LargeListArray.from_arrays(array_offsets, casted_array_values)
elif isinstance(feature, Sequence):
if feature.length > -1:
if _are_list_values_of_length(array, feature.length):
if array.null_count > 0:
# Ensure each null value in the array translates to [null] * pa_type.list_size in the array's values array
array_type = array.type
storage_type = _storage_type(array_type)
if array_type != storage_type:
# Temporarily convert to the storage type to support extension types in the slice operation
array = array_cast(
array,
storage_type,
allow_primitive_to_str=allow_primitive_to_str,
allow_decimal_to_str=allow_decimal_to_str,
)
array = pc.list_slice(array, 0, feature.length, return_fixed_size_list=True)
array = array_cast(
array,
array_type,
allow_primitive_to_str=allow_primitive_to_str,
allow_decimal_to_str=allow_decimal_to_str,
)
else:
array = pc.list_slice(array, 0, feature.length, return_fixed_size_list=True)
array_values = array.values
casted_array_values = _c(array_values, feature.feature)
return pa.FixedSizeListArray.from_arrays(
casted_array_values, feature.length, mask=array.is_null()
)
else:
array_values = array.values[
array.offset * feature.length : (array.offset + len(array)) * feature.length
]
return pa.FixedSizeListArray.from_arrays(_c(array_values, feature.feature), feature.length)
else:
casted_array_values = _c(array.values, feature.feature)
if pa.types.is_list(array.type) and casted_array_values.type == array.values.type:
# Both array and feature have equal list type and values (within the list) type
return array
else:
# Merge offsets with the null bitmap to avoid the "Null bitmap with offsets slice not supported" ArrowNotImplementedError
array_offsets = _combine_list_array_offsets_with_mask(array)
return pa.ListArray.from_arrays(array_offsets, casted_array_values)
elif pa.types.is_fixed_size_list(array.type):
# feature must be either [subfeature] or Sequence(subfeature)
if isinstance(feature, list):
array_offsets = (np.arange(len(array) + 1) + array.offset) * array.type.list_size
return pa.ListArray.from_arrays(array_offsets, _c(array.values, feature[0]), mask=array.is_null())
elif isinstance(feature, LargeList):
array_offsets = (np.arange(len(array) + 1) + array.offset) * array.type.list_size
return pa.LargeListArray.from_arrays(
array_offsets, _c(array.values, feature.feature), mask=array.is_null()
)
elif isinstance(feature, Sequence):
if feature.length > -1:
if feature.length == array.type.list_size:
array_values = array.values[
array.offset * array.type.list_size : (array.offset + len(array)) * array.type.list_size
]
casted_array_values = _c(array_values, feature.feature)
return pa.FixedSizeListArray.from_arrays(casted_array_values, feature.length, mask=array.is_null())
else:
array_offsets = (np.arange(len(array) + 1) + array.offset) * array.type.list_size
return pa.ListArray.from_arrays(array_offsets, _c(array.values, feature.feature), mask=array.is_null())
if pa.types.is_null(array.type):
return array_cast(
array,
get_nested_type(feature),
allow_primitive_to_str=allow_primitive_to_str,
allow_decimal_to_str=allow_decimal_to_str,
)
elif not isinstance(feature, (Sequence, dict, list, tuple)):
return array_cast(
array,
feature(),
allow_primitive_to_str=allow_primitive_to_str,
allow_decimal_to_str=allow_decimal_to_str,
)
raise TypeError(f"Couldn't cast array of type\n{_short_str(array.type)}\nto\n{_short_str(feature)}")
@_wrap_for_chunked_arrays
def embed_array_storage(array: pa.Array, feature: "FeatureType"):
"""Embed data into an arrays's storage.
For custom features like Audio or Image, it takes into account the "embed_storage" methods
they define to embed external data (e.g. an image file) into an array.
<Added version="2.4.0"/>
Args:
array (`pa.Array`):
The PyArrow array in which to embed data.
feature (`datasets.features.FeatureType`):
Array features.
Raises:
`TypeError`: if the target type is not supported according, e.g.
- if a field is missing
Returns:
array (`pyarrow.Array`): the casted array
"""
from .features import Sequence
_e = embed_array_storage
if isinstance(array, pa.ExtensionArray):
array = array.storage
if hasattr(feature, "embed_storage"):
return feature.embed_storage(array)
elif pa.types.is_struct(array.type):
# feature must be a dict or Sequence(subfeatures_dict)
if isinstance(feature, Sequence) and isinstance(feature.feature, dict):
feature = {
name: Sequence(subfeature, length=feature.length) for name, subfeature in feature.feature.items()
}
if isinstance(feature, dict):
arrays = [_e(array.field(name), subfeature) for name, subfeature in feature.items()]
return pa.StructArray.from_arrays(arrays, names=list(feature), mask=array.is_null())
elif pa.types.is_list(array.type):
# feature must be either [subfeature] or Sequence(subfeature)
# Merge offsets with the null bitmap to avoid the "Null bitmap with offsets slice not supported" ArrowNotImplementedError
array_offsets = _combine_list_array_offsets_with_mask(array)
if isinstance(feature, list):
return pa.ListArray.from_arrays(array_offsets, _e(array.values, feature[0]))
if isinstance(feature, Sequence) and feature.length == -1:
return pa.ListArray.from_arrays(array_offsets, _e(array.values, feature.feature))
elif pa.types.is_large_list(array.type):
# feature must be LargeList(subfeature)
# Merge offsets with the null bitmap to avoid the "Null bitmap with offsets slice not supported" ArrowNotImplementedError
array_offsets = _combine_list_array_offsets_with_mask(array)
return pa.LargeListArray.from_arrays(array_offsets, _e(array.values, feature.feature))
elif pa.types.is_fixed_size_list(array.type):
# feature must be Sequence(subfeature)
if isinstance(feature, Sequence) and feature.length > -1:
array_values = array.values[
array.offset * array.type.list_size : (array.offset + len(array)) * array.type.list_size
]
embedded_array_values = _e(array_values, feature.feature)
return pa.FixedSizeListArray.from_arrays(embedded_array_values, feature.length, mask=array.is_null())
if not isinstance(feature, (Sequence, dict, list, tuple)):
return array
raise TypeError(f"Couldn't embed array of type\n{_short_str(array.type)}\nwith\n{_short_str(feature)}")
class CastError(ValueError):
"""When it's not possible to cast an Arrow table to a specific schema or set of features"""
def __init__(self, *args, table_column_names: List[str], requested_column_names: List[str]) -> None:
super().__init__(*args)
self.table_column_names = table_column_names
self.requested_column_names = requested_column_names
def __reduce__(self):
# Fix unpickling: TypeError: __init__() missing 2 required keyword-only arguments: 'table_column_names' and 'requested_column_names'
return partial(
CastError, table_column_names=self.table_column_names, requested_column_names=self.requested_column_names
), ()
def details(self):
new_columns = set(self.table_column_names) - set(self.requested_column_names)
missing_columns = set(self.requested_column_names) - set(self.table_column_names)
if new_columns and missing_columns:
return f"there are {len(new_columns)} new columns ({_short_str(new_columns)}) and {len(missing_columns)} missing columns ({_short_str(missing_columns)})."
elif new_columns:
return f"there are {len(new_columns)} new columns ({_short_str(new_columns)})"
else:
return f"there are {len(missing_columns)} missing columns ({_short_str(missing_columns)})"
def cast_table_to_features(table: pa.Table, features: "Features"):
"""Cast a table to the arrow schema that corresponds to the requested features.
Args:
table (`pyarrow.Table`):
PyArrow table to cast.
features ([`Features`]):
Target features.
Returns:
table (`pyarrow.Table`): the casted table
"""
if sorted(table.column_names) != sorted(features):
raise CastError(
f"Couldn't cast\n{_short_str(table.schema)}\nto\n{_short_str(features)}\nbecause column names don't match",
table_column_names=table.column_names,
requested_column_names=list(features),
)
arrays = [cast_array_to_feature(table[name], feature) for name, feature in features.items()]
return pa.Table.from_arrays(arrays, schema=features.arrow_schema)
def cast_table_to_schema(table: pa.Table, schema: pa.Schema):
"""Cast a table to the arrow schema. Different from `cast_table_to_features`, this method can preserve nullability.
Args:
table (`pa.Table`):
PyArrow table to cast.
features ([`Features`]):
Target features.
Returns:
`pa.Table`: the casted table
"""
from .features import Features
features = Features.from_arrow_schema(schema)
table_column_names = set(table.column_names)
if not table_column_names <= set(schema.names):
raise CastError(
f"Couldn't cast\n{_short_str(table.schema)}\nto\n{_short_str(features)}\nbecause column names don't match",
table_column_names=table.column_names,
requested_column_names=list(features),
)
arrays = [
cast_array_to_feature(
table[name] if name in table_column_names else pa.array([None] * len(table), type=schema.field(name).type),
feature,
)
for name, feature in features.items()
]
return pa.Table.from_arrays(arrays, schema=schema)
def embed_table_storage(table: pa.Table):
"""Embed external data into a table's storage.
<Added version="2.4.0"/>
Args:
table (`pyarrow.Table`):
PyArrow table in which to embed data.
Returns:
table (`pyarrow.Table`): the table with embedded data
"""
from .features.features import Features, require_storage_embed
features = Features.from_arrow_schema(table.schema)
arrays = [
embed_array_storage(table[name], feature) if require_storage_embed(feature) else table[name]
for name, feature in features.items()
]
return pa.Table.from_arrays(arrays, schema=features.arrow_schema)
def table_cast(table: pa.Table, schema: pa.Schema):
"""Improved version of `pa.Table.cast`.
It supports casting to feature types stored in the schema metadata.
Args:
table (`pyarrow.Table`):
PyArrow table to cast.
schema (`pyarrow.Schema`):
Target PyArrow schema.
Returns:
table (`pyarrow.Table`): the casted table
"""
if table.schema != schema:
return cast_table_to_schema(table, schema)
elif table.schema.metadata != schema.metadata:
return table.replace_schema_metadata(schema.metadata)
else:
return table
def table_flatten(table: pa.Table):
"""Improved version of `pa.Table.flatten`.
It behaves as `pa.Table.flatten` in a sense it does 1-step flatten of the columns with a struct type into one column per struct field,
but updates the metadata and skips decodable features unless the `decode` attribute of these features is set to False.
Args:
table (`pa.Table`):
PyArrow table to flatten.
Returns:
`Table`: the flattened table
"""
from .features import Features
features = Features.from_arrow_schema(table.schema)
if any(hasattr(subfeature, "flatten") and subfeature.flatten() == subfeature for subfeature in features.values()):
flat_arrays = []
flat_column_names = []
for field in table.schema:
array = table.column(field.name)
subfeature = features[field.name]
if pa.types.is_struct(field.type) and (
not hasattr(subfeature, "flatten") or subfeature.flatten() != subfeature
):
flat_arrays.extend(array.flatten())
flat_column_names.extend([f"{field.name}.{subfield.name}" for subfield in field.type])
else:
flat_arrays.append(array)
flat_column_names.append(field.name)
flat_table = pa.Table.from_arrays(
flat_arrays,
names=flat_column_names,
)
else:
flat_table = table.flatten()
# Preserve complex types in the metadata
flat_features = features.flatten(max_depth=2)
flat_features = Features({column_name: flat_features[column_name] for column_name in flat_table.column_names})
return flat_table.replace_schema_metadata(flat_features.arrow_schema.metadata)
def table_visitor(table: pa.Table, function: Callable[[pa.Array], None]):
"""Visit all arrays in a table and apply a function to them.
Args:
table (`pyarrow.Table`):
PyArrow table to visit.
function (`Callable[[pa.Array], None]`):
Function to apply to each array.
"""
from .features import Features, Sequence
features = Features.from_arrow_schema(table.schema)
def _visit(array, feature):
if isinstance(array, pa.ChunkedArray):
for chunk in array.chunks:
_visit(chunk, feature)
else:
if isinstance(array, pa.ExtensionArray):
array = array.storage
function(array, feature)
if pa.types.is_struct(array.type) and not hasattr(feature, "cast_storage"):
if isinstance(feature, Sequence) and isinstance(feature.feature, dict):
feature = {
name: Sequence(subfeature, length=feature.length)
for name, subfeature in feature.feature.items()
}
for name, subfeature in feature.items():
_visit(array.field(name), subfeature)
elif pa.types.is_list(array.type):
if isinstance(feature, list):
_visit(array.values, feature[0])
elif isinstance(feature, Sequence):
_visit(array.values, feature.feature)
for name, feature in features.items():
_visit(table[name], feature)
def table_iter(table: Table, batch_size: int, drop_last_batch=False) -> Iterator[pa.Table]:
"""Iterate over sub-tables of size `batch_size`.
Args:
table (`pyarrow.Table`):
PyArrow table to iterate over.
batch_size (`int`):
Size of each sub-table to yield.
drop_last_batch (`bool`, defaults to `False`):
Drop the last batch if it is smaller than `batch_size`.
"""
chunks_buffer = []
chunks_buffer_size = 0
for chunk in table.to_reader(max_chunksize=batch_size):
if len(chunk) == 0:
continue
elif chunks_buffer_size + len(chunk) < batch_size:
chunks_buffer.append(chunk)
chunks_buffer_size += len(chunk)
continue
elif chunks_buffer_size + len(chunk) == batch_size:
chunks_buffer.append(chunk)
yield pa.Table.from_batches(chunks_buffer)
chunks_buffer = []
chunks_buffer_size = 0
else:
cropped_chunk_length = batch_size - chunks_buffer_size
chunks_buffer.append(chunk.slice(0, cropped_chunk_length))
yield pa.Table.from_batches(chunks_buffer)
chunks_buffer = [chunk.slice(cropped_chunk_length, len(chunk) - cropped_chunk_length)]
chunks_buffer_size = len(chunk) - cropped_chunk_length
if not drop_last_batch and chunks_buffer:
yield pa.Table.from_batches(chunks_buffer)
| datasets/src/datasets/table.py/0 | {
"file_path": "datasets/src/datasets/table.py",
"repo_id": "datasets",
"token_count": 41887
} |
# Copyright 2020 The HuggingFace Datasets Authors and the TensorFlow Datasets Authors.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# Lint as: python3
"""Some python utils function and classes."""
import copy
import functools
import itertools
import multiprocessing.pool
import os
import queue
import re
import types
import warnings
from contextlib import contextmanager
from dataclasses import fields, is_dataclass
from multiprocessing import Manager
from pathlib import Path
from queue import Empty
from shutil import disk_usage
from typing import Any, Callable, Dict, Iterable, List, Optional, Set, Tuple, TypeVar, Union
from urllib.parse import urlparse
import multiprocess
import multiprocess.pool
import numpy as np
from tqdm.auto import tqdm
from .. import config
from ..parallel import parallel_map
from . import logging
from . import tqdm as hf_tqdm
from ._dill import ( # noqa: F401 # imported for backward compatibility. TODO: remove in 3.0.0
Pickler,
dump,
dumps,
pklregister,
)
from ._filelock import FileLock
try: # pragma: no branch
import typing_extensions as _typing_extensions
from typing_extensions import Final, Literal
except ImportError:
_typing_extensions = Literal = Final = None
logger = logging.get_logger(__name__)
# NOTE: When used on an instance method, the cache is shared across all
# instances and IS NOT per-instance.
# See
# https://stackoverflow.com/questions/14946264/python-lru-cache-decorator-per-instance
# For @property methods, use @memoized_property below.
memoize = functools.lru_cache
def size_str(size_in_bytes):
"""Returns a human readable size string.
If size_in_bytes is None, then returns "Unknown size".
For example `size_str(1.5 * datasets.units.GiB) == "1.50 GiB"`.
Args:
size_in_bytes: `int` or `None`, the size, in bytes, that we want to
format as a human-readable size string.
"""
if not size_in_bytes:
return "Unknown size"
_NAME_LIST = [("PiB", 2**50), ("TiB", 2**40), ("GiB", 2**30), ("MiB", 2**20), ("KiB", 2**10)]
size_in_bytes = float(size_in_bytes)
for name, size_bytes in _NAME_LIST:
value = size_in_bytes / size_bytes
if value >= 1.0:
return f"{value:.2f} {name}"
return f"{int(size_in_bytes)} bytes"
def convert_file_size_to_int(size: Union[int, str]) -> int:
"""
Converts a size expressed as a string with digits an unit (like `"50MB"`) to an integer (in bytes).
Args:
size (`int` or `str`): The size to convert. Will be directly returned if an `int`.
Example:
```py
>>> convert_file_size_to_int("1MiB")
1048576
```
"""
if isinstance(size, int):
return size
if size.upper().endswith("PIB"):
return int(size[:-3]) * (2**50)
if size.upper().endswith("TIB"):
return int(size[:-3]) * (2**40)
if size.upper().endswith("GIB"):
return int(size[:-3]) * (2**30)
if size.upper().endswith("MIB"):
return int(size[:-3]) * (2**20)
if size.upper().endswith("KIB"):
return int(size[:-3]) * (2**10)
if size.upper().endswith("PB"):
int_size = int(size[:-2]) * (10**15)
return int_size // 8 if size.endswith("b") else int_size
if size.upper().endswith("TB"):
int_size = int(size[:-2]) * (10**12)
return int_size // 8 if size.endswith("b") else int_size
if size.upper().endswith("GB"):
int_size = int(size[:-2]) * (10**9)
return int_size // 8 if size.endswith("b") else int_size
if size.upper().endswith("MB"):
int_size = int(size[:-2]) * (10**6)
return int_size // 8 if size.endswith("b") else int_size
if size.upper().endswith("KB"):
int_size = int(size[:-2]) * (10**3)
return int_size // 8 if size.endswith("b") else int_size
raise ValueError(f"`size={size}` is not in a valid format. Use an integer followed by the unit, e.g., '5GB'.")
def glob_pattern_to_regex(pattern):
# partially taken from fsspec:
# https://github.com/fsspec/filesystem_spec/blob/697d0f8133d8a5fbc3926e4761d7ecd51337ce50/fsspec/asyn.py#L735
return (
pattern.replace("\\", r"\\")
.replace(".", r"\.")
.replace("*", ".*")
.replace("+", r"\+")
.replace("//", "/")
.replace("(", r"\(")
.replace(")", r"\)")
.replace("|", r"\|")
.replace("^", r"\^")
.replace("$", r"\$")
.rstrip("/")
.replace("?", ".")
)
def string_to_dict(string: str, pattern: str) -> Dict[str, str]:
"""Un-format a string using a python f-string pattern.
From https://stackoverflow.com/a/36838374
Example::
>>> p = 'hello, my name is {name} and I am a {age} year old {what}'
>>> s = p.format(name='cody', age=18, what='quarterback')
>>> s
'hello, my name is cody and I am a 18 year old quarterback'
>>> string_to_dict(s, p)
{'age': '18', 'name': 'cody', 'what': 'quarterback'}
Args:
string (str): input string
pattern (str): pattern formatted like a python f-string
Returns:
Dict[str, str]: dictionary of variable -> value, retrieved from the input using the pattern
Raises:
ValueError: if the string doesn't match the pattern
"""
regex = re.sub(r"{(.+?)}", r"(?P<_\1>.+)", pattern)
result = re.search(regex, string)
if result is None:
raise ValueError(f"String {string} doesn't match the pattern {pattern}")
values = list(result.groups())
keys = re.findall(r"{(.+?)}", pattern)
_dict = dict(zip(keys, values))
return _dict
def asdict(obj):
"""Convert an object to its dictionary representation recursively.
<Added version="2.4.0"/>
"""
# Implementation based on https://docs.python.org/3/library/dataclasses.html#dataclasses.asdict
def _is_dataclass_instance(obj):
# https://docs.python.org/3/library/dataclasses.html#dataclasses.is_dataclass
return is_dataclass(obj) and not isinstance(obj, type)
def _asdict_inner(obj):
if _is_dataclass_instance(obj):
result = {}
for f in fields(obj):
value = _asdict_inner(getattr(obj, f.name))
if not f.init or value != f.default or f.metadata.get("include_in_asdict_even_if_is_default", False):
result[f.name] = value
return result
elif isinstance(obj, tuple) and hasattr(obj, "_fields"):
# obj is a namedtuple
return type(obj)(*[_asdict_inner(v) for v in obj])
elif isinstance(obj, (list, tuple)):
# Assume we can create an object of this type by passing in a
# generator (which is not true for namedtuples, handled
# above).
return type(obj)(_asdict_inner(v) for v in obj)
elif isinstance(obj, dict):
return {_asdict_inner(k): _asdict_inner(v) for k, v in obj.items()}
else:
return copy.deepcopy(obj)
if not isinstance(obj, dict) and not _is_dataclass_instance(obj):
raise TypeError(f"{obj} is not a dict or a dataclass")
return _asdict_inner(obj)
@contextmanager
def temporary_assignment(obj, attr, value):
"""Temporarily assign obj.attr to value."""
original = getattr(obj, attr, None)
setattr(obj, attr, value)
try:
yield
finally:
setattr(obj, attr, original)
@contextmanager
def temp_seed(seed: int, set_pytorch=False, set_tensorflow=False):
"""Temporarily set the random seed. This works for python numpy, pytorch and tensorflow."""
np_state = np.random.get_state()
np.random.seed(seed)
if set_pytorch and config.TORCH_AVAILABLE:
import torch
torch_state = torch.random.get_rng_state()
torch.random.manual_seed(seed)
if torch.cuda.is_available():
torch_cuda_states = torch.cuda.get_rng_state_all()
torch.cuda.manual_seed_all(seed)
if set_tensorflow and config.TF_AVAILABLE:
import tensorflow as tf
from tensorflow.python.eager import context as tfpycontext
tf_state = tf.random.get_global_generator()
temp_gen = tf.random.Generator.from_seed(seed)
tf.random.set_global_generator(temp_gen)
if not tf.executing_eagerly():
raise ValueError("Setting random seed for TensorFlow is only available in eager mode")
tf_context = tfpycontext.context() # eager mode context
tf_seed = tf_context._seed
tf_rng_initialized = hasattr(tf_context, "_rng")
if tf_rng_initialized:
tf_rng = tf_context._rng
tf_context._set_global_seed(seed)
try:
yield
finally:
np.random.set_state(np_state)
if set_pytorch and config.TORCH_AVAILABLE:
torch.random.set_rng_state(torch_state)
if torch.cuda.is_available():
torch.cuda.set_rng_state_all(torch_cuda_states)
if set_tensorflow and config.TF_AVAILABLE:
tf.random.set_global_generator(tf_state)
tf_context._seed = tf_seed
if tf_rng_initialized:
tf_context._rng = tf_rng
else:
delattr(tf_context, "_rng")
def unique_values(values):
"""Iterate over iterable and return only unique values in order."""
seen = set()
for value in values:
if value not in seen:
seen.add(value)
yield value
def no_op_if_value_is_null(func):
"""If the value is None, return None, else call `func`."""
def wrapper(value):
return func(value) if value is not None else None
return wrapper
def first_non_null_value(iterable):
"""Return the index and the value of the first non-null value in the iterable. If all values are None, return -1 as index."""
for i, value in enumerate(iterable):
if value is not None:
return i, value
return -1, None
def zip_dict(*dicts):
"""Iterate over items of dictionaries grouped by their keys."""
for key in unique_values(itertools.chain(*dicts)): # set merge all keys
# Will raise KeyError if the dict don't have the same keys
yield key, tuple(d[key] for d in dicts)
class NonMutableDict(dict):
"""Dict where keys can only be added but not modified.
Will raise an error if the user try to overwrite one key. The error message
can be customized during construction. It will be formatted using {key} for
the overwritten key.
"""
def __init__(self, *args, **kwargs):
self._error_msg = kwargs.pop(
"error_msg",
"Try to overwrite existing key: {key}",
)
if kwargs:
raise ValueError("NonMutableDict cannot be initialized with kwargs.")
super().__init__(*args, **kwargs)
def __setitem__(self, key, value):
if key in self:
raise ValueError(self._error_msg.format(key=key))
return super().__setitem__(key, value)
def update(self, other):
if any(k in self for k in other):
raise ValueError(self._error_msg.format(key=set(self) & set(other)))
return super().update(other)
class classproperty(property): # pylint: disable=invalid-name
"""Descriptor to be used as decorator for @classmethods."""
def __get__(self, obj, objtype=None):
return self.fget.__get__(None, objtype)()
def _single_map_nested(args):
"""Apply a function recursively to each element of a nested data struct."""
function, data_struct, batched, batch_size, types, rank, disable_tqdm, desc = args
# Singleton first to spare some computation
if not isinstance(data_struct, dict) and not isinstance(data_struct, types):
if batched:
return function([data_struct])[0]
else:
return function(data_struct)
if (
batched
and not isinstance(data_struct, dict)
and isinstance(data_struct, types)
and all(not isinstance(v, (dict, types)) for v in data_struct)
):
return [mapped_item for batch in iter_batched(data_struct, batch_size) for mapped_item in function(batch)]
# Reduce logging to keep things readable in multiprocessing with tqdm
if rank is not None and logging.get_verbosity() < logging.WARNING:
logging.set_verbosity_warning()
# Print at least one thing to fix tqdm in notebooks in multiprocessing
# see https://github.com/tqdm/tqdm/issues/485#issuecomment-473338308
if rank is not None and not disable_tqdm and any("notebook" in tqdm_cls.__name__ for tqdm_cls in tqdm.__mro__):
print(" ", end="", flush=True)
# Loop over single examples or batches and write to buffer/file if examples are to be updated
pbar_iterable = data_struct.items() if isinstance(data_struct, dict) else data_struct
pbar_desc = (desc + " " if desc is not None else "") + "#" + str(rank) if rank is not None else desc
with hf_tqdm(pbar_iterable, disable=disable_tqdm, position=rank, unit="obj", desc=pbar_desc) as pbar:
if isinstance(data_struct, dict):
return {
k: _single_map_nested((function, v, batched, batch_size, types, None, True, None)) for k, v in pbar
}
else:
mapped = [_single_map_nested((function, v, batched, batch_size, types, None, True, None)) for v in pbar]
if isinstance(data_struct, list):
return mapped
elif isinstance(data_struct, tuple):
return tuple(mapped)
else:
return np.array(mapped)
def map_nested(
function: Callable[[Any], Any],
data_struct: Any,
dict_only: bool = False,
map_list: bool = True,
map_tuple: bool = False,
map_numpy: bool = False,
num_proc: Optional[int] = None,
parallel_min_length: int = 2,
batched: bool = False,
batch_size: Optional[int] = 1000,
types: Optional[tuple] = None,
disable_tqdm: bool = True,
desc: Optional[str] = None,
) -> Any:
"""Apply a function recursively to each element of a nested data struct.
Use multiprocessing if num_proc > 1 and the length of data_struct is greater than or equal to
`parallel_min_length`.
<Changed version="2.5.0">
Before version 2.5.0, multiprocessing was not used if `num_proc` was greater than or equal to ``len(iterable)``.
Now, if `num_proc` is greater than or equal to ``len(iterable)``, `num_proc` is set to ``len(iterable)`` and
multiprocessing is used.
</Changed>
Args:
function (`Callable`): Function to be applied to `data_struct`.
data_struct (`Any`): Data structure to apply `function` to.
dict_only (`bool`, default `False`): Whether only apply `function` recursively to `dict` values in
`data_struct`.
map_list (`bool`, default `True`): Whether also apply `function` recursively to `list` elements (besides `dict`
values).
map_tuple (`bool`, default `False`): Whether also apply `function` recursively to `tuple` elements (besides
`dict` values).
map_numpy (`bool, default `False`): Whether also apply `function` recursively to `numpy.array` elements (besides
`dict` values).
num_proc (`int`, *optional*): Number of processes.
The level in the data struct used for multiprocessing is the first level that has smaller sub-structs,
starting from the root.
parallel_min_length (`int`, default `2`): Minimum length of `data_struct` required for parallel
processing.
<Added version="2.5.0"/>
batched (`bool`, defaults to `False`):
Provide batch of items to `function`.
<Added version="2.19.0"/>
batch_size (`int`, *optional*, defaults to `1000`):
Number of items per batch provided to `function` if `batched=True`.
If `batch_size <= 0` or `batch_size == None`, provide the full iterable as a single batch to `function`.
<Added version="2.19.0"/>
types (`tuple`, *optional*): Additional types (besides `dict` values) to apply `function` recursively to their
elements.
disable_tqdm (`bool`, default `True`): Whether to disable the tqdm progressbar.
desc (`str`, *optional*): Prefix for the tqdm progressbar.
Returns:
`Any`
"""
if types is None:
types = []
if not dict_only:
if map_list:
types.append(list)
if map_tuple:
types.append(tuple)
if map_numpy:
types.append(np.ndarray)
types = tuple(types)
# Singleton
if not isinstance(data_struct, dict) and not isinstance(data_struct, types):
if batched:
data_struct = [data_struct]
mapped = function(data_struct)
if batched:
mapped = mapped[0]
return mapped
iterable = list(data_struct.values()) if isinstance(data_struct, dict) else data_struct
if num_proc is None:
num_proc = 1
if any(isinstance(v, types) and len(v) > len(iterable) for v in iterable):
mapped = [
map_nested(
function=function,
data_struct=obj,
num_proc=num_proc,
parallel_min_length=parallel_min_length,
batched=batched,
batch_size=batch_size,
types=types,
)
for obj in iterable
]
elif num_proc != -1 and num_proc <= 1 or len(iterable) < parallel_min_length:
if batched:
if batch_size is None or batch_size <= 0:
batch_size = max(len(iterable) // num_proc + int(len(iterable) % num_proc > 0), 1)
iterable = list(iter_batched(iterable, batch_size))
mapped = [
_single_map_nested((function, obj, batched, batch_size, types, None, True, None))
for obj in hf_tqdm(iterable, disable=disable_tqdm, desc=desc)
]
if batched:
mapped = [mapped_item for mapped_batch in mapped for mapped_item in mapped_batch]
else:
with warnings.catch_warnings():
warnings.filterwarnings(
"ignore",
message=".* is experimental and might be subject to breaking changes in the future\\.$",
category=UserWarning,
)
if batched:
if batch_size is None or batch_size <= 0:
batch_size = len(iterable) // num_proc + int(len(iterable) % num_proc > 0)
iterable = list(iter_batched(iterable, batch_size))
mapped = parallel_map(
function, iterable, num_proc, batched, batch_size, types, disable_tqdm, desc, _single_map_nested
)
if batched:
mapped = [mapped_item for mapped_batch in mapped for mapped_item in mapped_batch]
if isinstance(data_struct, dict):
return dict(zip(data_struct.keys(), mapped))
else:
if isinstance(data_struct, list):
return mapped
elif isinstance(data_struct, tuple):
return tuple(mapped)
else:
return np.array(mapped)
class NestedDataStructure:
def __init__(self, data=None):
self.data = data if data is not None else []
def flatten(self, data=None):
data = data if data is not None else self.data
if isinstance(data, dict):
return self.flatten(list(data.values()))
elif isinstance(data, (list, tuple)):
return [flattened for item in data for flattened in self.flatten(item)]
else:
return [data]
def has_sufficient_disk_space(needed_bytes, directory="."):
try:
free_bytes = disk_usage(os.path.abspath(directory)).free
except OSError:
return True
return needed_bytes < free_bytes
def _convert_github_url(url_path: str) -> Tuple[str, Optional[str]]:
"""Convert a link to a file on a github repo in a link to the raw github object."""
parsed = urlparse(url_path)
sub_directory = None
if parsed.scheme in ("http", "https", "s3") and parsed.netloc == "github.com":
if "blob" in url_path:
if not url_path.endswith(".py"):
raise ValueError(f"External import from github at {url_path} should point to a file ending with '.py'")
url_path = url_path.replace("blob", "raw") # Point to the raw file
else:
# Parse github url to point to zip
github_path = parsed.path[1:]
repo_info, branch = github_path.split("/tree/") if "/tree/" in github_path else (github_path, "master")
repo_owner, repo_name = repo_info.split("/")
url_path = f"https://github.com/{repo_owner}/{repo_name}/archive/{branch}.zip"
sub_directory = f"{repo_name}-{branch}"
return url_path, sub_directory
def lock_importable_file(importable_local_file: str) -> FileLock:
# Check the directory with a unique name in our dataset folder
# path is: ./datasets/dataset_name/hash_from_code/script.py
# we use a hash as subdirectory_name to be able to have multiple versions of a dataset processing file together
importable_directory_path = str(Path(importable_local_file).resolve().parent.parent)
lock_path = importable_directory_path + ".lock"
return FileLock(lock_path)
def get_imports(file_path: str) -> Tuple[str, str, str, str]:
"""Find whether we should import or clone additional files for a given processing script.
And list the import.
We allow:
- library dependencies,
- local dependencies and
- external dependencies whose url is specified with a comment starting from "# From:' followed by the raw url to a file, an archive or a github repository.
external dependencies will be downloaded (and extracted if needed in the dataset folder).
We also add an `__init__.py` to each sub-folder of a downloaded folder so the user can import from them in the script.
Note that only direct import in the dataset processing script will be handled
We don't recursively explore the additional import to download further files.
Example::
import tensorflow
import .c4_utils
import .clicr.dataset-code.build_json_dataset # From: https://raw.githubusercontent.com/clips/clicr/master/dataset-code/build_json_dataset
"""
lines = []
with open(file_path, encoding="utf-8") as f:
lines.extend(f.readlines())
logger.debug(f"Checking {file_path} for additional imports.")
imports: List[Tuple[str, str, str, Optional[str]]] = []
is_in_docstring = False
for line in lines:
docstr_start_match = re.findall(r'[\s\S]*?"""[\s\S]*?', line)
if len(docstr_start_match) == 1:
# flip True <=> False only if doctstring
# starts at line without finishing
is_in_docstring = not is_in_docstring
if is_in_docstring:
# import statements in doctstrings should
# not be added as required dependencies
continue
match = re.match(r"^import\s+(\.?)([^\s\.]+)[^#\r\n]*(?:#\s+From:\s+)?([^\r\n]*)", line, flags=re.MULTILINE)
if match is None:
match = re.match(
r"^from\s+(\.?)([^\s\.]+)(?:[^\s]*)\s+import\s+[^#\r\n]*(?:#\s+From:\s+)?([^\r\n]*)",
line,
flags=re.MULTILINE,
)
if match is None:
continue
if match.group(1):
# The import starts with a '.', we will download the relevant file
if any(imp[1] == match.group(2) for imp in imports):
# We already have this import
continue
if match.group(3):
# The import has a comment with 'From:', we'll retrieve it from the given url
url_path = match.group(3)
url_path, sub_directory = _convert_github_url(url_path)
imports.append(("external", match.group(2), url_path, sub_directory))
elif match.group(2):
# The import should be at the same place as the file
imports.append(("internal", match.group(2), match.group(2), None))
else:
if match.group(3):
# The import has a comment with `From: git+https:...`, asks user to pip install from git.
url_path = match.group(3)
imports.append(("library", match.group(2), url_path, None))
else:
imports.append(("library", match.group(2), match.group(2), None))
return imports
def copyfunc(func):
result = types.FunctionType(func.__code__, func.__globals__, func.__name__, func.__defaults__, func.__closure__)
result.__kwdefaults__ = func.__kwdefaults__
return result
Y = TypeVar("Y")
def _write_generator_to_queue(queue: queue.Queue, func: Callable[..., Iterable[Y]], kwargs: dict) -> int:
for i, result in enumerate(func(**kwargs)):
queue.put(result)
return i
def _get_pool_pid(pool: Union[multiprocessing.pool.Pool, multiprocess.pool.Pool]) -> Set[int]:
return {f.pid for f in pool._pool}
def iflatmap_unordered(
pool: Union[multiprocessing.pool.Pool, multiprocess.pool.Pool],
func: Callable[..., Iterable[Y]],
*,
kwargs_iterable: Iterable[dict],
) -> Iterable[Y]:
initial_pool_pid = _get_pool_pid(pool)
pool_changed = False
manager_cls = Manager if isinstance(pool, multiprocessing.pool.Pool) else multiprocess.Manager
with manager_cls() as manager:
queue = manager.Queue()
async_results = [
pool.apply_async(_write_generator_to_queue, (queue, func, kwargs)) for kwargs in kwargs_iterable
]
try:
while True:
try:
yield queue.get(timeout=0.05)
except Empty:
if all(async_result.ready() for async_result in async_results) and queue.empty():
break
if _get_pool_pid(pool) != initial_pool_pid:
pool_changed = True
# One of the subprocesses has died. We should not wait forever.
raise RuntimeError(
"One of the subprocesses has abruptly died during map operation."
"To debug the error, disable multiprocessing."
)
finally:
if not pool_changed:
# we get the result in case there's an error to raise
[async_result.get(timeout=0.05) for async_result in async_results]
T = TypeVar("T")
def iter_batched(iterable: Iterable[T], n: int) -> Iterable[List[T]]:
if n < 1:
raise ValueError(f"Invalid batch size {n}")
batch = []
for item in iterable:
batch.append(item)
if len(batch) == n:
yield batch
batch = []
if batch:
yield batch
| datasets/src/datasets/utils/py_utils.py/0 | {
"file_path": "datasets/src/datasets/utils/py_utils.py",
"repo_id": "datasets",
"token_count": 11710
} |
# Copyright 2020 The HuggingFace Datasets Authors and the current dataset script contributor.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# TODO: Address all TODOs and remove all explanatory comments
"""TODO: Add a description here."""
import csv
import json
import os
import datasets
# TODO: Add BibTeX citation
# Find for instance the citation on arxiv or on the dataset repo/website
_CITATION = """\
@InProceedings{huggingface:dataset,
title = {A great new dataset},
author={huggingface, Inc.
},
year={2020}
}
"""
# TODO: Add description of the dataset here
# You can copy an official description
_DESCRIPTION = """\
This new dataset is designed to solve this great NLP task and is crafted with a lot of care.
"""
# TODO: Add a link to an official homepage for the dataset here
_HOMEPAGE = ""
# TODO: Add the licence for the dataset here if you can find it
_LICENSE = ""
# TODO: Add link to the official dataset URLs here
# The HuggingFace Datasets library doesn't host the datasets but only points to the original files.
# This can be an arbitrary nested dict/list of URLs (see below in `_split_generators` method)
_URLS = {
"first_domain": "https://huggingface.co/great-new-dataset-first_domain.zip",
"second_domain": "https://huggingface.co/great-new-dataset-second_domain.zip",
}
# TODO: Name of the dataset usually matches the script name with CamelCase instead of snake_case
class NewDataset(datasets.GeneratorBasedBuilder):
"""TODO: Short description of my dataset."""
VERSION = datasets.Version("1.1.0")
# This is an example of a dataset with multiple configurations.
# If you don't want/need to define several sub-sets in your dataset,
# just remove the BUILDER_CONFIG_CLASS and the BUILDER_CONFIGS attributes.
# If you need to make complex sub-parts in the datasets with configurable options
# You can create your own builder configuration class to store attribute, inheriting from datasets.BuilderConfig
# BUILDER_CONFIG_CLASS = MyBuilderConfig
# You will be able to load one or the other configurations in the following list with
# data = datasets.load_dataset('my_dataset', 'first_domain')
# data = datasets.load_dataset('my_dataset', 'second_domain')
BUILDER_CONFIGS = [
datasets.BuilderConfig(name="first_domain", version=VERSION, description="This part of my dataset covers a first domain"),
datasets.BuilderConfig(name="second_domain", version=VERSION, description="This part of my dataset covers a second domain"),
]
DEFAULT_CONFIG_NAME = "first_domain" # It's not mandatory to have a default configuration. Just use one if it make sense.
def _info(self):
# TODO: This method specifies the datasets.DatasetInfo object which contains informations and typings for the dataset
if self.config.name == "first_domain": # This is the name of the configuration selected in BUILDER_CONFIGS above
features = datasets.Features(
{
"sentence": datasets.Value("string"),
"option1": datasets.Value("string"),
"answer": datasets.Value("string")
# These are the features of your dataset like images, labels ...
}
)
else: # This is an example to show how to have different features for "first_domain" and "second_domain"
features = datasets.Features(
{
"sentence": datasets.Value("string"),
"option2": datasets.Value("string"),
"second_domain_answer": datasets.Value("string")
# These are the features of your dataset like images, labels ...
}
)
return datasets.DatasetInfo(
# This is the description that will appear on the datasets page.
description=_DESCRIPTION,
# This defines the different columns of the dataset and their types
features=features, # Here we define them above because they are different between the two configurations
# If there's a common (input, target) tuple from the features, uncomment supervised_keys line below and
# specify them. They'll be used if as_supervised=True in builder.as_dataset.
# supervised_keys=("sentence", "label"),
# Homepage of the dataset for documentation
homepage=_HOMEPAGE,
# License for the dataset if available
license=_LICENSE,
# Citation for the dataset
citation=_CITATION,
)
def _split_generators(self, dl_manager):
# TODO: This method is tasked with downloading/extracting the data and defining the splits depending on the configuration
# If several configurations are possible (listed in BUILDER_CONFIGS), the configuration selected by the user is in self.config.name
# dl_manager is a datasets.download.DownloadManager that can be used to download and extract URLS
# It can accept any type or nested list/dict and will give back the same structure with the url replaced with path to local files.
# By default the archives will be extracted and a path to a cached folder where they are extracted is returned instead of the archive
urls = _URLS[self.config.name]
data_dir = dl_manager.download_and_extract(urls)
return [
datasets.SplitGenerator(
name=datasets.Split.TRAIN,
# These kwargs will be passed to _generate_examples
gen_kwargs={
"filepath": os.path.join(data_dir, "train.jsonl"),
"split": "train",
},
),
datasets.SplitGenerator(
name=datasets.Split.VALIDATION,
# These kwargs will be passed to _generate_examples
gen_kwargs={
"filepath": os.path.join(data_dir, "dev.jsonl"),
"split": "dev",
},
),
datasets.SplitGenerator(
name=datasets.Split.TEST,
# These kwargs will be passed to _generate_examples
gen_kwargs={
"filepath": os.path.join(data_dir, "test.jsonl"),
"split": "test"
},
),
]
# method parameters are unpacked from `gen_kwargs` as given in `_split_generators`
def _generate_examples(self, filepath, split):
# TODO: This method handles input defined in _split_generators to yield (key, example) tuples from the dataset.
# The `key` is for legacy reasons (tfds) and is not important in itself, but must be unique for each example.
with open(filepath, encoding="utf-8") as f:
for key, row in enumerate(f):
data = json.loads(row)
if self.config.name == "first_domain":
# Yields examples as (key, example) tuples
yield key, {
"sentence": data["sentence"],
"option1": data["option1"],
"answer": "" if split == "test" else data["answer"],
}
else:
yield key, {
"sentence": data["sentence"],
"option2": data["option2"],
"second_domain_answer": "" if split == "test" else data["second_domain_answer"],
}
| datasets/templates/new_dataset_script.py/0 | {
"file_path": "datasets/templates/new_dataset_script.py",
"repo_id": "datasets",
"token_count": 3156
} |
import io
import json
import fsspec
import pytest
from datasets import Dataset, DatasetDict, Features, NamedSplit, Value
from datasets.io.json import JsonDatasetReader, JsonDatasetWriter
from ..utils import assert_arrow_memory_doesnt_increase, assert_arrow_memory_increases
def _check_json_dataset(dataset, expected_features):
assert isinstance(dataset, Dataset)
assert dataset.num_rows == 4
assert dataset.num_columns == 3
assert dataset.column_names == ["col_1", "col_2", "col_3"]
for feature, expected_dtype in expected_features.items():
assert dataset.features[feature].dtype == expected_dtype
@pytest.mark.parametrize("keep_in_memory", [False, True])
def test_dataset_from_json_keep_in_memory(keep_in_memory, jsonl_path, tmp_path):
cache_dir = tmp_path / "cache"
expected_features = {"col_1": "string", "col_2": "int64", "col_3": "float64"}
with assert_arrow_memory_increases() if keep_in_memory else assert_arrow_memory_doesnt_increase():
dataset = JsonDatasetReader(jsonl_path, cache_dir=cache_dir, keep_in_memory=keep_in_memory).read()
_check_json_dataset(dataset, expected_features)
@pytest.mark.parametrize(
"features",
[
None,
{"col_1": "string", "col_2": "int64", "col_3": "float64"},
{"col_1": "string", "col_2": "string", "col_3": "string"},
{"col_1": "int32", "col_2": "int32", "col_3": "int32"},
{"col_1": "float32", "col_2": "float32", "col_3": "float32"},
],
)
def test_dataset_from_json_features(features, jsonl_path, tmp_path):
cache_dir = tmp_path / "cache"
default_expected_features = {"col_1": "string", "col_2": "int64", "col_3": "float64"}
expected_features = features.copy() if features else default_expected_features
features = (
Features({feature: Value(dtype) for feature, dtype in features.items()}) if features is not None else None
)
dataset = JsonDatasetReader(jsonl_path, features=features, cache_dir=cache_dir).read()
_check_json_dataset(dataset, expected_features)
@pytest.mark.parametrize(
"features",
[
None,
{"col_3": "float64", "col_1": "string", "col_2": "int64"},
],
)
def test_dataset_from_json_with_unsorted_column_names(features, jsonl_312_path, tmp_path):
cache_dir = tmp_path / "cache"
default_expected_features = {"col_3": "float64", "col_1": "string", "col_2": "int64"}
expected_features = features.copy() if features else default_expected_features
features = (
Features({feature: Value(dtype) for feature, dtype in features.items()}) if features is not None else None
)
dataset = JsonDatasetReader(jsonl_312_path, features=features, cache_dir=cache_dir).read()
assert isinstance(dataset, Dataset)
assert dataset.num_rows == 2
assert dataset.num_columns == 3
assert dataset.column_names == ["col_3", "col_1", "col_2"]
for feature, expected_dtype in expected_features.items():
assert dataset.features[feature].dtype == expected_dtype
def test_dataset_from_json_with_mismatched_features(jsonl_312_path, tmp_path):
# jsonl_312_path features are {"col_3": "float64", "col_1": "string", "col_2": "int64"}
features = {"col_2": "int64", "col_3": "float64", "col_1": "string"}
expected_features = features.copy()
features = (
Features({feature: Value(dtype) for feature, dtype in features.items()}) if features is not None else None
)
cache_dir = tmp_path / "cache"
dataset = JsonDatasetReader(jsonl_312_path, features=features, cache_dir=cache_dir).read()
assert isinstance(dataset, Dataset)
assert dataset.num_rows == 2
assert dataset.num_columns == 3
assert dataset.column_names == ["col_2", "col_3", "col_1"]
for feature, expected_dtype in expected_features.items():
assert dataset.features[feature].dtype == expected_dtype
@pytest.mark.parametrize("split", [None, NamedSplit("train"), "train", "test"])
def test_dataset_from_json_split(split, jsonl_path, tmp_path):
cache_dir = tmp_path / "cache"
expected_features = {"col_1": "string", "col_2": "int64", "col_3": "float64"}
dataset = JsonDatasetReader(jsonl_path, cache_dir=cache_dir, split=split).read()
_check_json_dataset(dataset, expected_features)
assert dataset.split == split if split else "train"
@pytest.mark.parametrize("path_type", [str, list])
def test_dataset_from_json_path_type(path_type, jsonl_path, tmp_path):
if issubclass(path_type, str):
path = jsonl_path
elif issubclass(path_type, list):
path = [jsonl_path]
cache_dir = tmp_path / "cache"
expected_features = {"col_1": "string", "col_2": "int64", "col_3": "float64"}
dataset = JsonDatasetReader(path, cache_dir=cache_dir).read()
_check_json_dataset(dataset, expected_features)
def _check_json_datasetdict(dataset_dict, expected_features, splits=("train",)):
assert isinstance(dataset_dict, DatasetDict)
for split in splits:
dataset = dataset_dict[split]
assert dataset.num_rows == 4
assert dataset.num_columns == 3
assert dataset.column_names == ["col_1", "col_2", "col_3"]
for feature, expected_dtype in expected_features.items():
assert dataset.features[feature].dtype == expected_dtype
@pytest.mark.parametrize("keep_in_memory", [False, True])
def test_datasetdict_from_json_keep_in_memory(keep_in_memory, jsonl_path, tmp_path):
cache_dir = tmp_path / "cache"
expected_features = {"col_1": "string", "col_2": "int64", "col_3": "float64"}
with assert_arrow_memory_increases() if keep_in_memory else assert_arrow_memory_doesnt_increase():
dataset = JsonDatasetReader({"train": jsonl_path}, cache_dir=cache_dir, keep_in_memory=keep_in_memory).read()
_check_json_datasetdict(dataset, expected_features)
@pytest.mark.parametrize(
"features",
[
None,
{"col_1": "string", "col_2": "int64", "col_3": "float64"},
{"col_1": "string", "col_2": "string", "col_3": "string"},
{"col_1": "int32", "col_2": "int32", "col_3": "int32"},
{"col_1": "float32", "col_2": "float32", "col_3": "float32"},
],
)
def test_datasetdict_from_json_features(features, jsonl_path, tmp_path):
cache_dir = tmp_path / "cache"
default_expected_features = {"col_1": "string", "col_2": "int64", "col_3": "float64"}
expected_features = features.copy() if features else default_expected_features
features = (
Features({feature: Value(dtype) for feature, dtype in features.items()}) if features is not None else None
)
dataset = JsonDatasetReader({"train": jsonl_path}, features=features, cache_dir=cache_dir).read()
_check_json_datasetdict(dataset, expected_features)
@pytest.mark.parametrize("split", [None, NamedSplit("train"), "train", "test"])
def test_datasetdict_from_json_splits(split, jsonl_path, tmp_path):
if split:
path = {split: jsonl_path}
else:
split = "train"
path = {"train": jsonl_path, "test": jsonl_path}
cache_dir = tmp_path / "cache"
expected_features = {"col_1": "string", "col_2": "int64", "col_3": "float64"}
dataset = JsonDatasetReader(path, cache_dir=cache_dir).read()
_check_json_datasetdict(dataset, expected_features, splits=list(path.keys()))
assert all(dataset[split].split == split for split in path.keys())
def load_json(buffer):
return json.load(buffer)
def load_json_lines(buffer):
return [json.loads(line) for line in buffer]
class TestJsonDatasetWriter:
@pytest.mark.parametrize("lines, load_json_function", [(True, load_json_lines), (False, load_json)])
def test_dataset_to_json_lines(self, lines, load_json_function, dataset):
with io.BytesIO() as buffer:
JsonDatasetWriter(dataset, buffer, lines=lines).write()
buffer.seek(0)
exported_content = load_json_function(buffer)
assert isinstance(exported_content, list)
assert isinstance(exported_content[0], dict)
assert len(exported_content) == 10
@pytest.mark.parametrize(
"orient, container, keys, len_at",
[
("records", list, {"tokens", "labels", "answers", "id"}, None),
("split", dict, {"columns", "data"}, "data"),
("index", dict, set("0123456789"), None),
("columns", dict, {"tokens", "labels", "answers", "id"}, "tokens"),
("values", list, None, None),
("table", dict, {"schema", "data"}, "data"),
],
)
def test_dataset_to_json_orient(self, orient, container, keys, len_at, dataset):
with io.BytesIO() as buffer:
JsonDatasetWriter(dataset, buffer, lines=False, orient=orient).write()
buffer.seek(0)
exported_content = load_json(buffer)
assert isinstance(exported_content, container)
if keys:
if container is dict:
assert exported_content.keys() == keys
else:
assert exported_content[0].keys() == keys
else:
assert not hasattr(exported_content, "keys") and not hasattr(exported_content[0], "keys")
if len_at:
assert len(exported_content[len_at]) == 10
else:
assert len(exported_content) == 10
@pytest.mark.parametrize("lines, load_json_function", [(True, load_json_lines), (False, load_json)])
def test_dataset_to_json_lines_multiproc(self, lines, load_json_function, dataset):
with io.BytesIO() as buffer:
JsonDatasetWriter(dataset, buffer, lines=lines, num_proc=2).write()
buffer.seek(0)
exported_content = load_json_function(buffer)
assert isinstance(exported_content, list)
assert isinstance(exported_content[0], dict)
assert len(exported_content) == 10
@pytest.mark.parametrize(
"orient, container, keys, len_at",
[
("records", list, {"tokens", "labels", "answers", "id"}, None),
("split", dict, {"columns", "data"}, "data"),
("index", dict, set("0123456789"), None),
("columns", dict, {"tokens", "labels", "answers", "id"}, "tokens"),
("values", list, None, None),
("table", dict, {"schema", "data"}, "data"),
],
)
def test_dataset_to_json_orient_multiproc(self, orient, container, keys, len_at, dataset):
with io.BytesIO() as buffer:
JsonDatasetWriter(dataset, buffer, lines=False, orient=orient, num_proc=2).write()
buffer.seek(0)
exported_content = load_json(buffer)
assert isinstance(exported_content, container)
if keys:
if container is dict:
assert exported_content.keys() == keys
else:
assert exported_content[0].keys() == keys
else:
assert not hasattr(exported_content, "keys") and not hasattr(exported_content[0], "keys")
if len_at:
assert len(exported_content[len_at]) == 10
else:
assert len(exported_content) == 10
def test_dataset_to_json_orient_invalidproc(self, dataset):
with pytest.raises(ValueError):
with io.BytesIO() as buffer:
JsonDatasetWriter(dataset, buffer, num_proc=0)
@pytest.mark.parametrize("compression, extension", [("gzip", "gz"), ("bz2", "bz2"), ("xz", "xz")])
def test_dataset_to_json_compression(self, shared_datadir, tmp_path_factory, extension, compression, dataset):
path = tmp_path_factory.mktemp("data") / f"test.json.{extension}"
original_path = str(shared_datadir / f"test_file.json.{extension}")
JsonDatasetWriter(dataset, path, compression=compression).write()
with fsspec.open(path, "rb", compression="infer") as f:
exported_content = f.read()
with fsspec.open(original_path, "rb", compression="infer") as f:
original_content = f.read()
assert exported_content == original_content
def test_dataset_to_json_fsspec(self, dataset, mockfs):
dataset_path = "mock://my_dataset.json"
writer = JsonDatasetWriter(dataset, dataset_path, storage_options=mockfs.storage_options)
assert writer.write() > 0
assert mockfs.isfile(dataset_path)
with fsspec.open(dataset_path, "rb", **mockfs.storage_options) as f:
assert f.read()
| datasets/tests/io/test_json.py/0 | {
"file_path": "datasets/tests/io/test_json.py",
"repo_id": "datasets",
"token_count": 5153
} |
import textwrap
import pyarrow as pa
import pytest
from datasets import Features, Image
from datasets.builder import InvalidConfigName
from datasets.data_files import DataFilesList
from datasets.packaged_modules.text.text import Text, TextConfig
from ..utils import require_pil
@pytest.fixture
def text_file(tmp_path):
filename = tmp_path / "text.txt"
data = textwrap.dedent(
"""\
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur.
Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum.
Second paragraph:
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur.
Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum.
"""
)
with open(filename, "w", encoding="utf-8") as f:
f.write(data)
return str(filename)
@pytest.fixture
def text_file_with_image(tmp_path, image_file):
filename = tmp_path / "text_with_image.txt"
with open(filename, "w", encoding="utf-8") as f:
f.write(image_file)
return str(filename)
def test_config_raises_when_invalid_name() -> None:
with pytest.raises(InvalidConfigName, match="Bad characters"):
_ = TextConfig(name="name-with-*-invalid-character")
@pytest.mark.parametrize("data_files", ["str_path", ["str_path"], DataFilesList(["str_path"], [()])])
def test_config_raises_when_invalid_data_files(data_files) -> None:
with pytest.raises(ValueError, match="Expected a DataFilesDict"):
_ = TextConfig(name="name", data_files=data_files)
@pytest.mark.parametrize("keep_linebreaks", [True, False])
def test_text_linebreaks(text_file, keep_linebreaks):
with open(text_file, encoding="utf-8") as f:
expected_content = f.read().splitlines(keepends=keep_linebreaks)
text = Text(keep_linebreaks=keep_linebreaks, encoding="utf-8")
generator = text._generate_tables([[text_file]])
generated_content = pa.concat_tables([table for _, table in generator]).to_pydict()["text"]
assert generated_content == expected_content
@require_pil
def test_text_cast_image(text_file_with_image):
with open(text_file_with_image, encoding="utf-8") as f:
image_file = f.read().splitlines()[0]
text = Text(encoding="utf-8", features=Features({"image": Image()}))
generator = text._generate_tables([[text_file_with_image]])
pa_table = pa.concat_tables([table for _, table in generator])
assert pa_table.schema.field("image").type == Image()()
generated_content = pa_table.to_pydict()["image"]
assert generated_content == [{"path": image_file, "bytes": None}]
@pytest.mark.parametrize("sample_by", ["line", "paragraph", "document"])
def test_text_sample_by(sample_by, text_file):
with open(text_file, encoding="utf-8") as f:
expected_content = f.read()
if sample_by == "line":
expected_content = expected_content.splitlines()
elif sample_by == "paragraph":
expected_content = expected_content.split("\n\n")
elif sample_by == "document":
expected_content = [expected_content]
text = Text(sample_by=sample_by, encoding="utf-8", chunksize=100)
generator = text._generate_tables([[text_file]])
generated_content = pa.concat_tables([table for _, table in generator]).to_pydict()["text"]
assert generated_content == expected_content
| datasets/tests/packaged_modules/test_text.py/0 | {
"file_path": "datasets/tests/packaged_modules/test_text.py",
"repo_id": "datasets",
"token_count": 1494
} |
import importlib
import os
import fsspec
import pytest
from fsspec import register_implementation
from fsspec.core import url_to_fs
from fsspec.registry import _registry as _fsspec_registry
from datasets.filesystems import COMPRESSION_FILESYSTEMS, is_remote_filesystem
from .utils import require_lz4, require_zstandard
def test_mockfs(mockfs):
assert "mock" in _fsspec_registry
assert "bz2" in _fsspec_registry
def test_non_mockfs():
assert "mock" not in _fsspec_registry
assert "bz2" in _fsspec_registry
def test_is_remote_filesystem(mockfs):
is_remote = is_remote_filesystem(mockfs)
assert is_remote is True
fs = fsspec.filesystem("file")
is_remote = is_remote_filesystem(fs)
assert is_remote is False
@pytest.mark.parametrize("compression_fs_class", COMPRESSION_FILESYSTEMS)
def test_compression_filesystems(compression_fs_class, gz_file, bz2_file, lz4_file, zstd_file, xz_file, text_file):
input_paths = {"gzip": gz_file, "xz": xz_file, "zstd": zstd_file, "bz2": bz2_file, "lz4": lz4_file}
input_path = input_paths[compression_fs_class.protocol]
if input_path is None:
reason = f"for '{compression_fs_class.protocol}' compression protocol, "
if compression_fs_class.protocol == "lz4":
reason += require_lz4.kwargs["reason"]
elif compression_fs_class.protocol == "zstd":
reason += require_zstandard.kwargs["reason"]
pytest.skip(reason)
fs = fsspec.filesystem(compression_fs_class.protocol, fo=input_path)
assert isinstance(fs, compression_fs_class)
expected_filename = os.path.basename(input_path)
expected_filename = expected_filename[: expected_filename.rindex(".")]
assert fs.glob("*") == [expected_filename]
with fs.open(expected_filename, "r", encoding="utf-8") as f, open(text_file, encoding="utf-8") as expected_file:
assert f.read() == expected_file.read()
@pytest.mark.parametrize("protocol", ["zip", "gzip"])
def test_fs_isfile(protocol, zip_jsonl_path, jsonl_gz_path):
compressed_file_paths = {"zip": zip_jsonl_path, "gzip": jsonl_gz_path}
compressed_file_path = compressed_file_paths[protocol]
member_file_path = "dataset.jsonl"
path = f"{protocol}://{member_file_path}::{compressed_file_path}"
fs, *_ = url_to_fs(path)
assert fs.isfile(member_file_path)
assert not fs.isfile("non_existing_" + member_file_path)
def test_fs_overwrites():
protocol = "bz2"
# Import module
import datasets.filesystems
# Overwrite protocol and reload
register_implementation(protocol, None, clobber=True)
with pytest.warns(UserWarning) as warning_info:
importlib.reload(datasets.filesystems)
assert len(warning_info) == 1
assert (
str(warning_info[0].message)
== f"A filesystem protocol was already set for {protocol} and will be overwritten."
)
| datasets/tests/test_filesystem.py/0 | {
"file_path": "datasets/tests/test_filesystem.py",
"repo_id": "datasets",
"token_count": 1145
} |
import inspect
import pytest
from datasets.splits import Split, SplitDict, SplitInfo
from datasets.utils.py_utils import asdict
@pytest.mark.parametrize(
"split_dict",
[
SplitDict(),
SplitDict({"train": SplitInfo(name="train", num_bytes=1337, num_examples=42, dataset_name="my_dataset")}),
SplitDict({"train": SplitInfo(name="train", num_bytes=1337, num_examples=42)}),
SplitDict({"train": SplitInfo()}),
],
)
def test_split_dict_to_yaml_list(split_dict: SplitDict):
split_dict_yaml_list = split_dict._to_yaml_list()
assert len(split_dict_yaml_list) == len(split_dict)
reloaded = SplitDict._from_yaml_list(split_dict_yaml_list)
for split_name, split_info in split_dict.items():
# dataset_name field is deprecated, and is therefore not part of the YAML dump
split_info.dataset_name = None
# the split name of split_dict takes over the name of the split info object
split_info.name = split_name
assert split_dict == reloaded
@pytest.mark.parametrize(
"split_info", [SplitInfo(), SplitInfo(dataset_name=None), SplitInfo(dataset_name="my_dataset")]
)
def test_split_dict_asdict_has_dataset_name(split_info):
# For backward compatibility, we need asdict(split_dict) to return split info dictrionaries with the "dataset_name"
# field even if it's deprecated. This way old versionso of `datasets` can still reload dataset_infos.json files
split_dict_asdict = asdict(SplitDict({"train": split_info}))
assert "dataset_name" in split_dict_asdict["train"]
assert split_dict_asdict["train"]["dataset_name"] == split_info.dataset_name
def test_named_split_inequality():
# Used while building the docs, when set as a default parameter value in a function signature
assert Split.TRAIN != inspect.Parameter.empty
| datasets/tests/test_splits.py/0 | {
"file_path": "datasets/tests/test_splits.py",
"repo_id": "datasets",
"token_count": 678
} |
import argparse
import sys
sys.path.append(".")
from base_classes import IPAdapterTextToImageBenchmark # noqa: E402
IP_ADAPTER_CKPTS = {
# because original SD v1.5 has been taken down.
"Lykon/DreamShaper": ("h94/IP-Adapter", "ip-adapter_sd15.bin"),
"stabilityai/stable-diffusion-xl-base-1.0": ("h94/IP-Adapter", "ip-adapter_sdxl.bin"),
}
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--ckpt",
type=str,
default="rstabilityai/stable-diffusion-xl-base-1.0",
choices=list(IP_ADAPTER_CKPTS.keys()),
)
parser.add_argument("--batch_size", type=int, default=1)
parser.add_argument("--num_inference_steps", type=int, default=50)
parser.add_argument("--model_cpu_offload", action="store_true")
parser.add_argument("--run_compile", action="store_true")
args = parser.parse_args()
args.ip_adapter_id = IP_ADAPTER_CKPTS[args.ckpt]
benchmark_pipe = IPAdapterTextToImageBenchmark(args)
args.ckpt = f"{args.ckpt} (IP-Adapter)"
benchmark_pipe.benchmark(args)
| diffusers/benchmarks/benchmark_ip_adapters.py/0 | {
"file_path": "diffusers/benchmarks/benchmark_ip_adapters.py",
"repo_id": "diffusers",
"token_count": 450
} |
FROM nvidia/cuda:12.1.0-runtime-ubuntu20.04
LABEL maintainer="Hugging Face"
LABEL repository="diffusers"
ENV DEBIAN_FRONTEND=noninteractive
RUN apt-get -y update \
&& apt-get install -y software-properties-common \
&& add-apt-repository ppa:deadsnakes/ppa
RUN apt install -y bash \
build-essential \
git \
git-lfs \
curl \
ca-certificates \
libsndfile1-dev \
libgl1 \
python3.10 \
python3.10-dev \
python3-pip \
python3.10-venv && \
rm -rf /var/lib/apt/lists
# make sure to use venv
RUN python3.10 -m venv /opt/venv
ENV PATH="/opt/venv/bin:$PATH"
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
RUN python3.10 -m pip install --no-cache-dir --upgrade pip uv==0.1.11 && \
python3.10 -m uv pip install --no-cache-dir \
torch \
torchvision \
torchaudio \
invisible_watermark && \
python3.10 -m pip install --no-cache-dir \
accelerate \
datasets \
hf-doc-builder \
huggingface-hub \
hf_transfer \
Jinja2 \
librosa \
numpy==1.26.4 \
scipy \
tensorboard \
transformers \
pytorch-lightning \
hf_transfer
CMD ["/bin/bash"]
| diffusers/docker/diffusers-pytorch-cuda/Dockerfile/0 | {
"file_path": "diffusers/docker/diffusers-pytorch-cuda/Dockerfile",
"repo_id": "diffusers",
"token_count": 518
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# PEFT
Diffusers supports loading adapters such as [LoRA](../../using-diffusers/loading_adapters) with the [PEFT](https://huggingface.co/docs/peft/index) library with the [`~loaders.peft.PeftAdapterMixin`] class. This allows modeling classes in Diffusers like [`UNet2DConditionModel`], [`SD3Transformer2DModel`] to operate with an adapter.
<Tip>
Refer to the [Inference with PEFT](../../tutorials/using_peft_for_inference.md) tutorial for an overview of how to use PEFT in Diffusers for inference.
</Tip>
## PeftAdapterMixin
[[autodoc]] loaders.peft.PeftAdapterMixin
| diffusers/docs/source/en/api/loaders/peft.md/0 | {
"file_path": "diffusers/docs/source/en/api/loaders/peft.md",
"repo_id": "diffusers",
"token_count": 332
} |
<!-- Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License. -->
# AutoencoderKLLTXVideo
The 3D variational autoencoder (VAE) model with KL loss used in [LTX](https://huggingface.co/Lightricks/LTX-Video) was introduced by Lightricks.
The model can be loaded with the following code snippet.
```python
from diffusers import AutoencoderKLLTXVideo
vae = AutoencoderKLLTXVideo.from_pretrained("Lightricks/LTX-Video", subfolder="vae", torch_dtype=torch.float32).to("cuda")
```
## AutoencoderKLLTXVideo
[[autodoc]] AutoencoderKLLTXVideo
- decode
- encode
- all
## AutoencoderKLOutput
[[autodoc]] models.autoencoders.autoencoder_kl.AutoencoderKLOutput
## DecoderOutput
[[autodoc]] models.autoencoders.vae.DecoderOutput
| diffusers/docs/source/en/api/models/autoencoderkl_ltx_video.md/0 | {
"file_path": "diffusers/docs/source/en/api/models/autoencoderkl_ltx_video.md",
"repo_id": "diffusers",
"token_count": 386
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Stable Cascade
This model is built upon the [Würstchen](https://openreview.net/forum?id=gU58d5QeGv) architecture and its main
difference to other models like Stable Diffusion is that it is working at a much smaller latent space. Why is this
important? The smaller the latent space, the **faster** you can run inference and the **cheaper** the training becomes.
How small is the latent space? Stable Diffusion uses a compression factor of 8, resulting in a 1024x1024 image being
encoded to 128x128. Stable Cascade achieves a compression factor of 42, meaning that it is possible to encode a
1024x1024 image to 24x24, while maintaining crisp reconstructions. The text-conditional model is then trained in the
highly compressed latent space. Previous versions of this architecture, achieved a 16x cost reduction over Stable
Diffusion 1.5.
Therefore, this kind of model is well suited for usages where efficiency is important. Furthermore, all known extensions
like finetuning, LoRA, ControlNet, IP-Adapter, LCM etc. are possible with this method as well.
The original codebase can be found at [Stability-AI/StableCascade](https://github.com/Stability-AI/StableCascade).
## Model Overview
Stable Cascade consists of three models: Stage A, Stage B and Stage C, representing a cascade to generate images,
hence the name "Stable Cascade".
Stage A & B are used to compress images, similar to what the job of the VAE is in Stable Diffusion.
However, with this setup, a much higher compression of images can be achieved. While the Stable Diffusion models use a
spatial compression factor of 8, encoding an image with resolution of 1024 x 1024 to 128 x 128, Stable Cascade achieves
a compression factor of 42. This encodes a 1024 x 1024 image to 24 x 24, while being able to accurately decode the
image. This comes with the great benefit of cheaper training and inference. Furthermore, Stage C is responsible
for generating the small 24 x 24 latents given a text prompt.
The Stage C model operates on the small 24 x 24 latents and denoises the latents conditioned on text prompts. The model is also the largest component in the Cascade pipeline and is meant to be used with the `StableCascadePriorPipeline`
The Stage B and Stage A models are used with the `StableCascadeDecoderPipeline` and are responsible for generating the final image given the small 24 x 24 latents.
<Tip warning={true}>
There are some restrictions on data types that can be used with the Stable Cascade models. The official checkpoints for the `StableCascadePriorPipeline` do not support the `torch.float16` data type. Please use `torch.bfloat16` instead.
In order to use the `torch.bfloat16` data type with the `StableCascadeDecoderPipeline` you need to have PyTorch 2.2.0 or higher installed. This also means that using the `StableCascadeCombinedPipeline` with `torch.bfloat16` requires PyTorch 2.2.0 or higher, since it calls the `StableCascadeDecoderPipeline` internally.
If it is not possible to install PyTorch 2.2.0 or higher in your environment, the `StableCascadeDecoderPipeline` can be used on its own with the `torch.float16` data type. You can download the full precision or `bf16` variant weights for the pipeline and cast the weights to `torch.float16`.
</Tip>
## Usage example
```python
import torch
from diffusers import StableCascadeDecoderPipeline, StableCascadePriorPipeline
prompt = "an image of a shiba inu, donning a spacesuit and helmet"
negative_prompt = ""
prior = StableCascadePriorPipeline.from_pretrained("stabilityai/stable-cascade-prior", variant="bf16", torch_dtype=torch.bfloat16)
decoder = StableCascadeDecoderPipeline.from_pretrained("stabilityai/stable-cascade", variant="bf16", torch_dtype=torch.float16)
prior.enable_model_cpu_offload()
prior_output = prior(
prompt=prompt,
height=1024,
width=1024,
negative_prompt=negative_prompt,
guidance_scale=4.0,
num_images_per_prompt=1,
num_inference_steps=20
)
decoder.enable_model_cpu_offload()
decoder_output = decoder(
image_embeddings=prior_output.image_embeddings.to(torch.float16),
prompt=prompt,
negative_prompt=negative_prompt,
guidance_scale=0.0,
output_type="pil",
num_inference_steps=10
).images[0]
decoder_output.save("cascade.png")
```
## Using the Lite Versions of the Stage B and Stage C models
```python
import torch
from diffusers import (
StableCascadeDecoderPipeline,
StableCascadePriorPipeline,
StableCascadeUNet,
)
prompt = "an image of a shiba inu, donning a spacesuit and helmet"
negative_prompt = ""
prior_unet = StableCascadeUNet.from_pretrained("stabilityai/stable-cascade-prior", subfolder="prior_lite")
decoder_unet = StableCascadeUNet.from_pretrained("stabilityai/stable-cascade", subfolder="decoder_lite")
prior = StableCascadePriorPipeline.from_pretrained("stabilityai/stable-cascade-prior", prior=prior_unet)
decoder = StableCascadeDecoderPipeline.from_pretrained("stabilityai/stable-cascade", decoder=decoder_unet)
prior.enable_model_cpu_offload()
prior_output = prior(
prompt=prompt,
height=1024,
width=1024,
negative_prompt=negative_prompt,
guidance_scale=4.0,
num_images_per_prompt=1,
num_inference_steps=20
)
decoder.enable_model_cpu_offload()
decoder_output = decoder(
image_embeddings=prior_output.image_embeddings,
prompt=prompt,
negative_prompt=negative_prompt,
guidance_scale=0.0,
output_type="pil",
num_inference_steps=10
).images[0]
decoder_output.save("cascade.png")
```
## Loading original checkpoints with `from_single_file`
Loading the original format checkpoints is supported via `from_single_file` method in the StableCascadeUNet.
```python
import torch
from diffusers import (
StableCascadeDecoderPipeline,
StableCascadePriorPipeline,
StableCascadeUNet,
)
prompt = "an image of a shiba inu, donning a spacesuit and helmet"
negative_prompt = ""
prior_unet = StableCascadeUNet.from_single_file(
"https://huggingface.co/stabilityai/stable-cascade/resolve/main/stage_c_bf16.safetensors",
torch_dtype=torch.bfloat16
)
decoder_unet = StableCascadeUNet.from_single_file(
"https://huggingface.co/stabilityai/stable-cascade/blob/main/stage_b_bf16.safetensors",
torch_dtype=torch.bfloat16
)
prior = StableCascadePriorPipeline.from_pretrained("stabilityai/stable-cascade-prior", prior=prior_unet, torch_dtype=torch.bfloat16)
decoder = StableCascadeDecoderPipeline.from_pretrained("stabilityai/stable-cascade", decoder=decoder_unet, torch_dtype=torch.bfloat16)
prior.enable_model_cpu_offload()
prior_output = prior(
prompt=prompt,
height=1024,
width=1024,
negative_prompt=negative_prompt,
guidance_scale=4.0,
num_images_per_prompt=1,
num_inference_steps=20
)
decoder.enable_model_cpu_offload()
decoder_output = decoder(
image_embeddings=prior_output.image_embeddings,
prompt=prompt,
negative_prompt=negative_prompt,
guidance_scale=0.0,
output_type="pil",
num_inference_steps=10
).images[0]
decoder_output.save("cascade-single-file.png")
```
## Uses
### Direct Use
The model is intended for research purposes for now. Possible research areas and tasks include
- Research on generative models.
- Safe deployment of models which have the potential to generate harmful content.
- Probing and understanding the limitations and biases of generative models.
- Generation of artworks and use in design and other artistic processes.
- Applications in educational or creative tools.
Excluded uses are described below.
### Out-of-Scope Use
The model was not trained to be factual or true representations of people or events,
and therefore using the model to generate such content is out-of-scope for the abilities of this model.
The model should not be used in any way that violates Stability AI's [Acceptable Use Policy](https://stability.ai/use-policy).
## Limitations and Bias
### Limitations
- Faces and people in general may not be generated properly.
- The autoencoding part of the model is lossy.
## StableCascadeCombinedPipeline
[[autodoc]] StableCascadeCombinedPipeline
- all
- __call__
## StableCascadePriorPipeline
[[autodoc]] StableCascadePriorPipeline
- all
- __call__
## StableCascadePriorPipelineOutput
[[autodoc]] pipelines.stable_cascade.pipeline_stable_cascade_prior.StableCascadePriorPipelineOutput
## StableCascadeDecoderPipeline
[[autodoc]] StableCascadeDecoderPipeline
- all
- __call__
| diffusers/docs/source/en/api/pipelines/stable_cascade.md/0 | {
"file_path": "diffusers/docs/source/en/api/pipelines/stable_cascade.md",
"repo_id": "diffusers",
"token_count": 2836
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# DPMSolverMultistepInverse
`DPMSolverMultistepInverse` is the inverted scheduler from [DPM-Solver: A Fast ODE Solver for Diffusion Probabilistic Model Sampling in Around 10 Steps](https://huggingface.co/papers/2206.00927) and [DPM-Solver++: Fast Solver for Guided Sampling of Diffusion Probabilistic Models](https://huggingface.co/papers/2211.01095) by Cheng Lu, Yuhao Zhou, Fan Bao, Jianfei Chen, Chongxuan Li, and Jun Zhu.
The implementation is mostly based on the DDIM inversion definition of [Null-text Inversion for Editing Real Images using Guided Diffusion Models](https://huggingface.co/papers/2211.09794) and notebook implementation of the [`DiffEdit`] latent inversion from [Xiang-cd/DiffEdit-stable-diffusion](https://github.com/Xiang-cd/DiffEdit-stable-diffusion/blob/main/diffedit.ipynb).
## Tips
Dynamic thresholding from [Imagen](https://huggingface.co/papers/2205.11487) is supported, and for pixel-space
diffusion models, you can set both `algorithm_type="dpmsolver++"` and `thresholding=True` to use the dynamic
thresholding. This thresholding method is unsuitable for latent-space diffusion models such as
Stable Diffusion.
## DPMSolverMultistepInverseScheduler
[[autodoc]] DPMSolverMultistepInverseScheduler
## SchedulerOutput
[[autodoc]] schedulers.scheduling_utils.SchedulerOutput
| diffusers/docs/source/en/api/schedulers/multistep_dpm_solver_inverse.md/0 | {
"file_path": "diffusers/docs/source/en/api/schedulers/multistep_dpm_solver_inverse.md",
"repo_id": "diffusers",
"token_count": 547
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Evaluating Diffusion Models
<a target="_blank" href="https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/evaluation.ipynb">
<img src="https://colab.research.google.com/assets/colab-badge.svg" alt="Open In Colab"/>
</a>
Evaluation of generative models like [Stable Diffusion](https://huggingface.co/docs/diffusers/stable_diffusion) is subjective in nature. But as practitioners and researchers, we often have to make careful choices amongst many different possibilities. So, when working with different generative models (like GANs, Diffusion, etc.), how do we choose one over the other?
Qualitative evaluation of such models can be error-prone and might incorrectly influence a decision.
However, quantitative metrics don't necessarily correspond to image quality. So, usually, a combination
of both qualitative and quantitative evaluations provides a stronger signal when choosing one model
over the other.
In this document, we provide a non-exhaustive overview of qualitative and quantitative methods to evaluate Diffusion models. For quantitative methods, we specifically focus on how to implement them alongside `diffusers`.
The methods shown in this document can also be used to evaluate different [noise schedulers](https://huggingface.co/docs/diffusers/main/en/api/schedulers/overview) keeping the underlying generation model fixed.
## Scenarios
We cover Diffusion models with the following pipelines:
- Text-guided image generation (such as the [`StableDiffusionPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/text2img)).
- Text-guided image generation, additionally conditioned on an input image (such as the [`StableDiffusionImg2ImgPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/img2img) and [`StableDiffusionInstructPix2PixPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/pix2pix)).
- Class-conditioned image generation models (such as the [`DiTPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/dit)).
## Qualitative Evaluation
Qualitative evaluation typically involves human assessment of generated images. Quality is measured across aspects such as compositionality, image-text alignment, and spatial relations. Common prompts provide a degree of uniformity for subjective metrics.
DrawBench and PartiPrompts are prompt datasets used for qualitative benchmarking. DrawBench and PartiPrompts were introduced by [Imagen](https://imagen.research.google/) and [Parti](https://parti.research.google/) respectively.
From the [official Parti website](https://parti.research.google/):
> PartiPrompts (P2) is a rich set of over 1600 prompts in English that we release as part of this work. P2 can be used to measure model capabilities across various categories and challenge aspects.
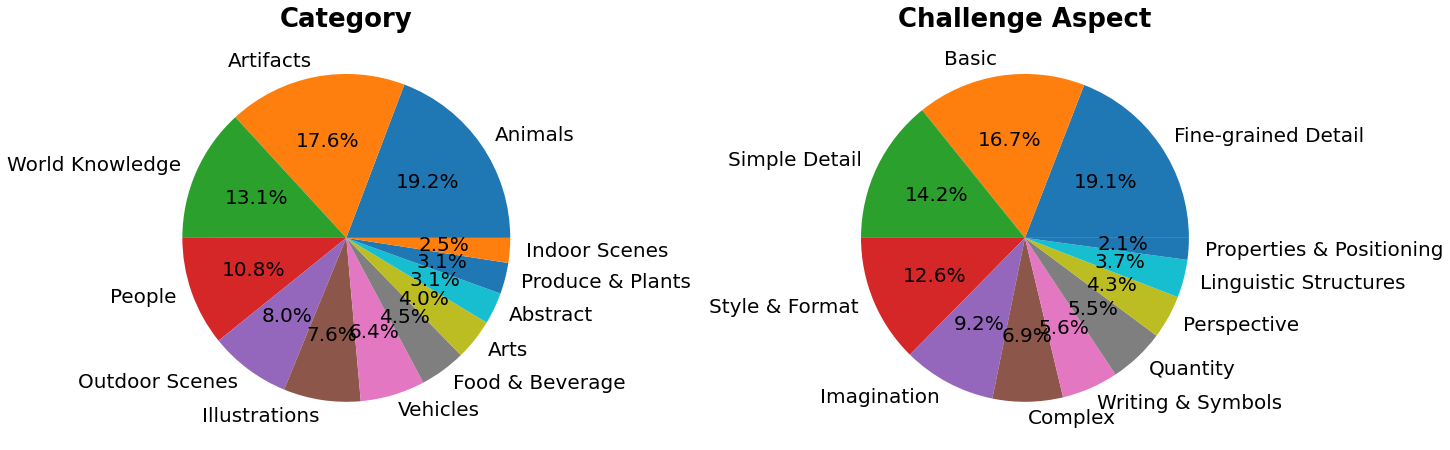
PartiPrompts has the following columns:
- Prompt
- Category of the prompt (such as “Abstract”, “World Knowledge”, etc.)
- Challenge reflecting the difficulty (such as “Basic”, “Complex”, “Writing & Symbols”, etc.)
These benchmarks allow for side-by-side human evaluation of different image generation models.
For this, the 🧨 Diffusers team has built **Open Parti Prompts**, which is a community-driven qualitative benchmark based on Parti Prompts to compare state-of-the-art open-source diffusion models:
- [Open Parti Prompts Game](https://huggingface.co/spaces/OpenGenAI/open-parti-prompts): For 10 parti prompts, 4 generated images are shown and the user selects the image that suits the prompt best.
- [Open Parti Prompts Leaderboard](https://huggingface.co/spaces/OpenGenAI/parti-prompts-leaderboard): The leaderboard comparing the currently best open-sourced diffusion models to each other.
To manually compare images, let’s see how we can use `diffusers` on a couple of PartiPrompts.
Below we show some prompts sampled across different challenges: Basic, Complex, Linguistic Structures, Imagination, and Writing & Symbols. Here we are using PartiPrompts as a [dataset](https://huggingface.co/datasets/nateraw/parti-prompts).
```python
from datasets import load_dataset
# prompts = load_dataset("nateraw/parti-prompts", split="train")
# prompts = prompts.shuffle()
# sample_prompts = [prompts[i]["Prompt"] for i in range(5)]
# Fixing these sample prompts in the interest of reproducibility.
sample_prompts = [
"a corgi",
"a hot air balloon with a yin-yang symbol, with the moon visible in the daytime sky",
"a car with no windows",
"a cube made of porcupine",
'The saying "BE EXCELLENT TO EACH OTHER" written on a red brick wall with a graffiti image of a green alien wearing a tuxedo. A yellow fire hydrant is on a sidewalk in the foreground.',
]
```
Now we can use these prompts to generate some images using Stable Diffusion ([v1-4 checkpoint](https://huggingface.co/CompVis/stable-diffusion-v1-4)):
```python
import torch
seed = 0
generator = torch.manual_seed(seed)
images = sd_pipeline(sample_prompts, num_images_per_prompt=1, generator=generator).images
```

We can also set `num_images_per_prompt` accordingly to compare different images for the same prompt. Running the same pipeline but with a different checkpoint ([v1-5](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5)), yields:

Once several images are generated from all the prompts using multiple models (under evaluation), these results are presented to human evaluators for scoring. For
more details on the DrawBench and PartiPrompts benchmarks, refer to their respective papers.
<Tip>
It is useful to look at some inference samples while a model is training to measure the
training progress. In our [training scripts](https://github.com/huggingface/diffusers/tree/main/examples/), we support this utility with additional support for
logging to TensorBoard and Weights & Biases.
</Tip>
## Quantitative Evaluation
In this section, we will walk you through how to evaluate three different diffusion pipelines using:
- CLIP score
- CLIP directional similarity
- FID
### Text-guided image generation
[CLIP score](https://arxiv.org/abs/2104.08718) measures the compatibility of image-caption pairs. Higher CLIP scores imply higher compatibility 🔼. The CLIP score is a quantitative measurement of the qualitative concept "compatibility". Image-caption pair compatibility can also be thought of as the semantic similarity between the image and the caption. CLIP score was found to have high correlation with human judgement.
Let's first load a [`StableDiffusionPipeline`]:
```python
from diffusers import StableDiffusionPipeline
import torch
model_ckpt = "CompVis/stable-diffusion-v1-4"
sd_pipeline = StableDiffusionPipeline.from_pretrained(model_ckpt, torch_dtype=torch.float16).to("cuda")
```
Generate some images with multiple prompts:
```python
prompts = [
"a photo of an astronaut riding a horse on mars",
"A high tech solarpunk utopia in the Amazon rainforest",
"A pikachu fine dining with a view to the Eiffel Tower",
"A mecha robot in a favela in expressionist style",
"an insect robot preparing a delicious meal",
"A small cabin on top of a snowy mountain in the style of Disney, artstation",
]
images = sd_pipeline(prompts, num_images_per_prompt=1, output_type="np").images
print(images.shape)
# (6, 512, 512, 3)
```
And then, we calculate the CLIP score.
```python
from torchmetrics.functional.multimodal import clip_score
from functools import partial
clip_score_fn = partial(clip_score, model_name_or_path="openai/clip-vit-base-patch16")
def calculate_clip_score(images, prompts):
images_int = (images * 255).astype("uint8")
clip_score = clip_score_fn(torch.from_numpy(images_int).permute(0, 3, 1, 2), prompts).detach()
return round(float(clip_score), 4)
sd_clip_score = calculate_clip_score(images, prompts)
print(f"CLIP score: {sd_clip_score}")
# CLIP score: 35.7038
```
In the above example, we generated one image per prompt. If we generated multiple images per prompt, we would have to take the average score from the generated images per prompt.
Now, if we wanted to compare two checkpoints compatible with the [`StableDiffusionPipeline`] we should pass a generator while calling the pipeline. First, we generate images with a
fixed seed with the [v1-4 Stable Diffusion checkpoint](https://huggingface.co/CompVis/stable-diffusion-v1-4):
```python
seed = 0
generator = torch.manual_seed(seed)
images = sd_pipeline(prompts, num_images_per_prompt=1, generator=generator, output_type="np").images
```
Then we load the [v1-5 checkpoint](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5) to generate images:
```python
model_ckpt_1_5 = "stable-diffusion-v1-5/stable-diffusion-v1-5"
sd_pipeline_1_5 = StableDiffusionPipeline.from_pretrained(model_ckpt_1_5, torch_dtype=torch.float16).to("cuda")
images_1_5 = sd_pipeline_1_5(prompts, num_images_per_prompt=1, generator=generator, output_type="np").images
```
And finally, we compare their CLIP scores:
```python
sd_clip_score_1_4 = calculate_clip_score(images, prompts)
print(f"CLIP Score with v-1-4: {sd_clip_score_1_4}")
# CLIP Score with v-1-4: 34.9102
sd_clip_score_1_5 = calculate_clip_score(images_1_5, prompts)
print(f"CLIP Score with v-1-5: {sd_clip_score_1_5}")
# CLIP Score with v-1-5: 36.2137
```
It seems like the [v1-5](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5) checkpoint performs better than its predecessor. Note, however, that the number of prompts we used to compute the CLIP scores is quite low. For a more practical evaluation, this number should be way higher, and the prompts should be diverse.
<Tip warning={true}>
By construction, there are some limitations in this score. The captions in the training dataset
were crawled from the web and extracted from `alt` and similar tags associated an image on the internet.
They are not necessarily representative of what a human being would use to describe an image. Hence we
had to "engineer" some prompts here.
</Tip>
### Image-conditioned text-to-image generation
In this case, we condition the generation pipeline with an input image as well as a text prompt. Let's take the [`StableDiffusionInstructPix2PixPipeline`], as an example. It takes an edit instruction as an input prompt and an input image to be edited.
Here is one example:
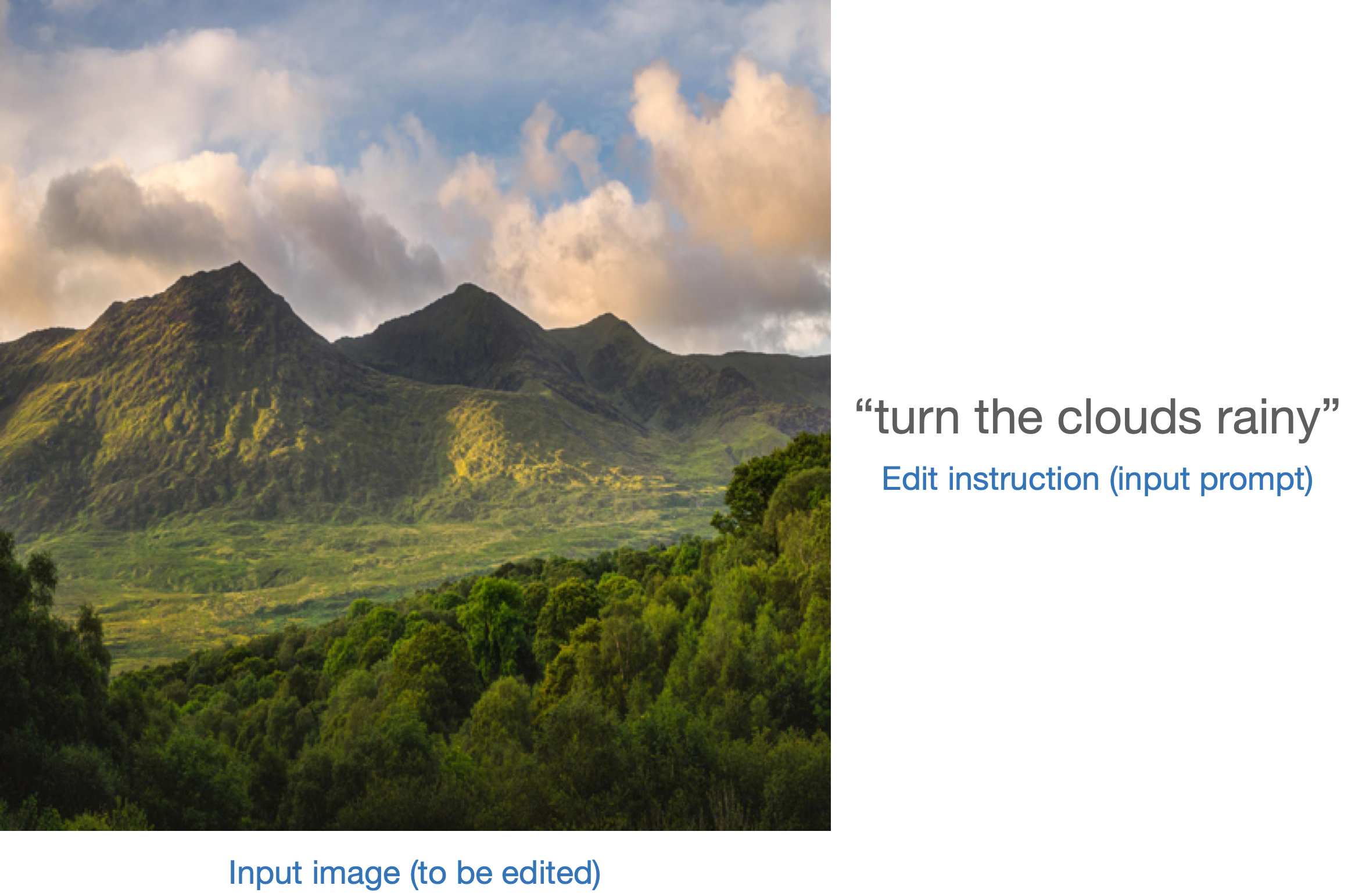
One strategy to evaluate such a model is to measure the consistency of the change between the two images (in [CLIP](https://huggingface.co/docs/transformers/model_doc/clip) space) with the change between the two image captions (as shown in [CLIP-Guided Domain Adaptation of Image Generators](https://arxiv.org/abs/2108.00946)). This is referred to as the "**CLIP directional similarity**".
- Caption 1 corresponds to the input image (image 1) that is to be edited.
- Caption 2 corresponds to the edited image (image 2). It should reflect the edit instruction.
Following is a pictorial overview:
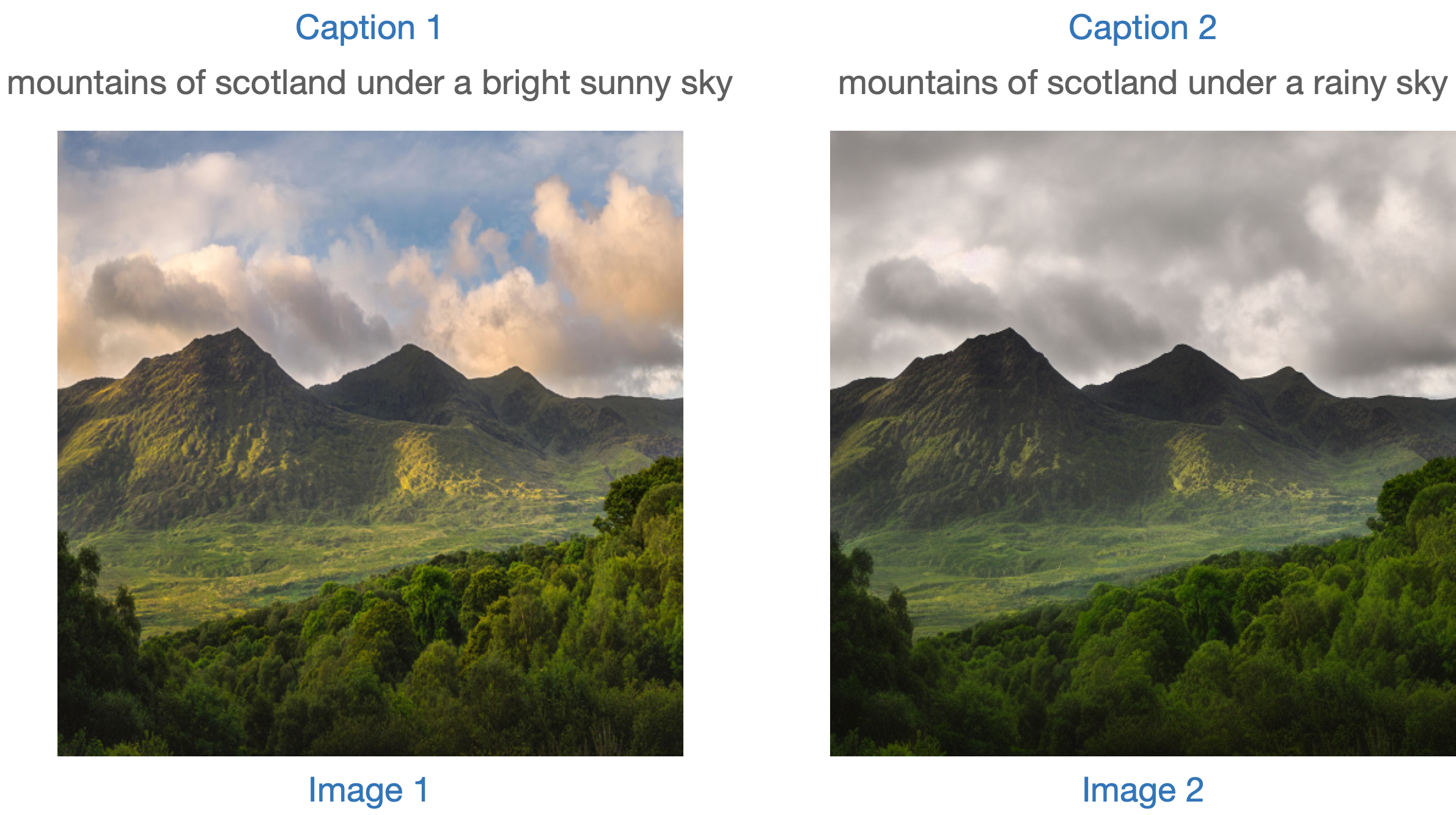
We have prepared a mini dataset to implement this metric. Let's first load the dataset.
```python
from datasets import load_dataset
dataset = load_dataset("sayakpaul/instructpix2pix-demo", split="train")
dataset.features
```
```bash
{'input': Value(dtype='string', id=None),
'edit': Value(dtype='string', id=None),
'output': Value(dtype='string', id=None),
'image': Image(decode=True, id=None)}
```
Here we have:
- `input` is a caption corresponding to the `image`.
- `edit` denotes the edit instruction.
- `output` denotes the modified caption reflecting the `edit` instruction.
Let's take a look at a sample.
```python
idx = 0
print(f"Original caption: {dataset[idx]['input']}")
print(f"Edit instruction: {dataset[idx]['edit']}")
print(f"Modified caption: {dataset[idx]['output']}")
```
```bash
Original caption: 2. FAROE ISLANDS: An archipelago of 18 mountainous isles in the North Atlantic Ocean between Norway and Iceland, the Faroe Islands has 'everything you could hope for', according to Big 7 Travel. It boasts 'crystal clear waterfalls, rocky cliffs that seem to jut out of nowhere and velvety green hills'
Edit instruction: make the isles all white marble
Modified caption: 2. WHITE MARBLE ISLANDS: An archipelago of 18 mountainous white marble isles in the North Atlantic Ocean between Norway and Iceland, the White Marble Islands has 'everything you could hope for', according to Big 7 Travel. It boasts 'crystal clear waterfalls, rocky cliffs that seem to jut out of nowhere and velvety green hills'
```
And here is the image:
```python
dataset[idx]["image"]
```

We will first edit the images of our dataset with the edit instruction and compute the directional similarity.
Let's first load the [`StableDiffusionInstructPix2PixPipeline`]:
```python
from diffusers import StableDiffusionInstructPix2PixPipeline
instruct_pix2pix_pipeline = StableDiffusionInstructPix2PixPipeline.from_pretrained(
"timbrooks/instruct-pix2pix", torch_dtype=torch.float16
).to("cuda")
```
Now, we perform the edits:
```python
import numpy as np
def edit_image(input_image, instruction):
image = instruct_pix2pix_pipeline(
instruction,
image=input_image,
output_type="np",
generator=generator,
).images[0]
return image
input_images = []
original_captions = []
modified_captions = []
edited_images = []
for idx in range(len(dataset)):
input_image = dataset[idx]["image"]
edit_instruction = dataset[idx]["edit"]
edited_image = edit_image(input_image, edit_instruction)
input_images.append(np.array(input_image))
original_captions.append(dataset[idx]["input"])
modified_captions.append(dataset[idx]["output"])
edited_images.append(edited_image)
```
To measure the directional similarity, we first load CLIP's image and text encoders:
```python
from transformers import (
CLIPTokenizer,
CLIPTextModelWithProjection,
CLIPVisionModelWithProjection,
CLIPImageProcessor,
)
clip_id = "openai/clip-vit-large-patch14"
tokenizer = CLIPTokenizer.from_pretrained(clip_id)
text_encoder = CLIPTextModelWithProjection.from_pretrained(clip_id).to("cuda")
image_processor = CLIPImageProcessor.from_pretrained(clip_id)
image_encoder = CLIPVisionModelWithProjection.from_pretrained(clip_id).to("cuda")
```
Notice that we are using a particular CLIP checkpoint, i.e., `openai/clip-vit-large-patch14`. This is because the Stable Diffusion pre-training was performed with this CLIP variant. For more details, refer to the [documentation](https://huggingface.co/docs/transformers/model_doc/clip).
Next, we prepare a PyTorch `nn.Module` to compute directional similarity:
```python
import torch.nn as nn
import torch.nn.functional as F
class DirectionalSimilarity(nn.Module):
def __init__(self, tokenizer, text_encoder, image_processor, image_encoder):
super().__init__()
self.tokenizer = tokenizer
self.text_encoder = text_encoder
self.image_processor = image_processor
self.image_encoder = image_encoder
def preprocess_image(self, image):
image = self.image_processor(image, return_tensors="pt")["pixel_values"]
return {"pixel_values": image.to("cuda")}
def tokenize_text(self, text):
inputs = self.tokenizer(
text,
max_length=self.tokenizer.model_max_length,
padding="max_length",
truncation=True,
return_tensors="pt",
)
return {"input_ids": inputs.input_ids.to("cuda")}
def encode_image(self, image):
preprocessed_image = self.preprocess_image(image)
image_features = self.image_encoder(**preprocessed_image).image_embeds
image_features = image_features / image_features.norm(dim=1, keepdim=True)
return image_features
def encode_text(self, text):
tokenized_text = self.tokenize_text(text)
text_features = self.text_encoder(**tokenized_text).text_embeds
text_features = text_features / text_features.norm(dim=1, keepdim=True)
return text_features
def compute_directional_similarity(self, img_feat_one, img_feat_two, text_feat_one, text_feat_two):
sim_direction = F.cosine_similarity(img_feat_two - img_feat_one, text_feat_two - text_feat_one)
return sim_direction
def forward(self, image_one, image_two, caption_one, caption_two):
img_feat_one = self.encode_image(image_one)
img_feat_two = self.encode_image(image_two)
text_feat_one = self.encode_text(caption_one)
text_feat_two = self.encode_text(caption_two)
directional_similarity = self.compute_directional_similarity(
img_feat_one, img_feat_two, text_feat_one, text_feat_two
)
return directional_similarity
```
Let's put `DirectionalSimilarity` to use now.
```python
dir_similarity = DirectionalSimilarity(tokenizer, text_encoder, image_processor, image_encoder)
scores = []
for i in range(len(input_images)):
original_image = input_images[i]
original_caption = original_captions[i]
edited_image = edited_images[i]
modified_caption = modified_captions[i]
similarity_score = dir_similarity(original_image, edited_image, original_caption, modified_caption)
scores.append(float(similarity_score.detach().cpu()))
print(f"CLIP directional similarity: {np.mean(scores)}")
# CLIP directional similarity: 0.0797976553440094
```
Like the CLIP Score, the higher the CLIP directional similarity, the better it is.
It should be noted that the `StableDiffusionInstructPix2PixPipeline` exposes two arguments, namely, `image_guidance_scale` and `guidance_scale` that let you control the quality of the final edited image. We encourage you to experiment with these two arguments and see the impact of that on the directional similarity.
We can extend the idea of this metric to measure how similar the original image and edited version are. To do that, we can just do `F.cosine_similarity(img_feat_two, img_feat_one)`. For these kinds of edits, we would still want the primary semantics of the images to be preserved as much as possible, i.e., a high similarity score.
We can use these metrics for similar pipelines such as the [`StableDiffusionPix2PixZeroPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/pix2pix_zero#diffusers.StableDiffusionPix2PixZeroPipeline).
<Tip>
Both CLIP score and CLIP direction similarity rely on the CLIP model, which can make the evaluations biased.
</Tip>
***Extending metrics like IS, FID (discussed later), or KID can be difficult*** when the model under evaluation was pre-trained on a large image-captioning dataset (such as the [LAION-5B dataset](https://laion.ai/blog/laion-5b/)). This is because underlying these metrics is an InceptionNet (pre-trained on the ImageNet-1k dataset) used for extracting intermediate image features. The pre-training dataset of Stable Diffusion may have limited overlap with the pre-training dataset of InceptionNet, so it is not a good candidate here for feature extraction.
***Using the above metrics helps evaluate models that are class-conditioned. For example, [DiT](https://huggingface.co/docs/diffusers/main/en/api/pipelines/dit). It was pre-trained being conditioned on the ImageNet-1k classes.***
### Class-conditioned image generation
Class-conditioned generative models are usually pre-trained on a class-labeled dataset such as [ImageNet-1k](https://huggingface.co/datasets/imagenet-1k). Popular metrics for evaluating these models include Fréchet Inception Distance (FID), Kernel Inception Distance (KID), and Inception Score (IS). In this document, we focus on FID ([Heusel et al.](https://arxiv.org/abs/1706.08500)). We show how to compute it with the [`DiTPipeline`](https://huggingface.co/docs/diffusers/api/pipelines/dit), which uses the [DiT model](https://arxiv.org/abs/2212.09748) under the hood.
FID aims to measure how similar are two datasets of images. As per [this resource](https://mmgeneration.readthedocs.io/en/latest/quick_run.html#fid):
> Fréchet Inception Distance is a measure of similarity between two datasets of images. It was shown to correlate well with the human judgment of visual quality and is most often used to evaluate the quality of samples of Generative Adversarial Networks. FID is calculated by computing the Fréchet distance between two Gaussians fitted to feature representations of the Inception network.
These two datasets are essentially the dataset of real images and the dataset of fake images (generated images in our case). FID is usually calculated with two large datasets. However, for this document, we will work with two mini datasets.
Let's first download a few images from the ImageNet-1k training set:
```python
from zipfile import ZipFile
import requests
def download(url, local_filepath):
r = requests.get(url)
with open(local_filepath, "wb") as f:
f.write(r.content)
return local_filepath
dummy_dataset_url = "https://hf.co/datasets/sayakpaul/sample-datasets/resolve/main/sample-imagenet-images.zip"
local_filepath = download(dummy_dataset_url, dummy_dataset_url.split("/")[-1])
with ZipFile(local_filepath, "r") as zipper:
zipper.extractall(".")
```
```python
from PIL import Image
import os
import numpy as np
dataset_path = "sample-imagenet-images"
image_paths = sorted([os.path.join(dataset_path, x) for x in os.listdir(dataset_path)])
real_images = [np.array(Image.open(path).convert("RGB")) for path in image_paths]
```
These are 10 images from the following ImageNet-1k classes: "cassette_player", "chain_saw" (x2), "church", "gas_pump" (x3), "parachute" (x2), and "tench".
<p align="center">
<img src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/evaluation_diffusion_models/real-images.png" alt="real-images"><br>
<em>Real images.</em>
</p>
Now that the images are loaded, let's apply some lightweight pre-processing on them to use them for FID calculation.
```python
from torchvision.transforms import functional as F
import torch
def preprocess_image(image):
image = torch.tensor(image).unsqueeze(0)
image = image.permute(0, 3, 1, 2) / 255.0
return F.center_crop(image, (256, 256))
real_images = torch.cat([preprocess_image(image) for image in real_images])
print(real_images.shape)
# torch.Size([10, 3, 256, 256])
```
We now load the [`DiTPipeline`](https://huggingface.co/docs/diffusers/api/pipelines/dit) to generate images conditioned on the above-mentioned classes.
```python
from diffusers import DiTPipeline, DPMSolverMultistepScheduler
dit_pipeline = DiTPipeline.from_pretrained("facebook/DiT-XL-2-256", torch_dtype=torch.float16)
dit_pipeline.scheduler = DPMSolverMultistepScheduler.from_config(dit_pipeline.scheduler.config)
dit_pipeline = dit_pipeline.to("cuda")
seed = 0
generator = torch.manual_seed(seed)
words = [
"cassette player",
"chainsaw",
"chainsaw",
"church",
"gas pump",
"gas pump",
"gas pump",
"parachute",
"parachute",
"tench",
]
class_ids = dit_pipeline.get_label_ids(words)
output = dit_pipeline(class_labels=class_ids, generator=generator, output_type="np")
fake_images = output.images
fake_images = torch.tensor(fake_images)
fake_images = fake_images.permute(0, 3, 1, 2)
print(fake_images.shape)
# torch.Size([10, 3, 256, 256])
```
Now, we can compute the FID using [`torchmetrics`](https://torchmetrics.readthedocs.io/).
```python
from torchmetrics.image.fid import FrechetInceptionDistance
fid = FrechetInceptionDistance(normalize=True)
fid.update(real_images, real=True)
fid.update(fake_images, real=False)
print(f"FID: {float(fid.compute())}")
# FID: 177.7147216796875
```
The lower the FID, the better it is. Several things can influence FID here:
- Number of images (both real and fake)
- Randomness induced in the diffusion process
- Number of inference steps in the diffusion process
- The scheduler being used in the diffusion process
For the last two points, it is, therefore, a good practice to run the evaluation across different seeds and inference steps, and then report an average result.
<Tip warning={true}>
FID results tend to be fragile as they depend on a lot of factors:
* The specific Inception model used during computation.
* The implementation accuracy of the computation.
* The image format (not the same if we start from PNGs vs JPGs).
Keeping that in mind, FID is often most useful when comparing similar runs, but it is
hard to reproduce paper results unless the authors carefully disclose the FID
measurement code.
These points apply to other related metrics too, such as KID and IS.
</Tip>
As a final step, let's visually inspect the `fake_images`.
<p align="center">
<img src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/evaluation_diffusion_models/fake-images.png" alt="fake-images"><br>
<em>Fake images.</em>
</p>
| diffusers/docs/source/en/conceptual/evaluation.md/0 | {
"file_path": "diffusers/docs/source/en/conceptual/evaluation.md",
"repo_id": "diffusers",
"token_count": 8359
} |
# T-GATE
[T-GATE](https://github.com/HaozheLiu-ST/T-GATE/tree/main) accelerates inference for [Stable Diffusion](../api/pipelines/stable_diffusion/overview), [PixArt](../api/pipelines/pixart), and [Latency Consistency Model](../api/pipelines/latent_consistency_models.md) pipelines by skipping the cross-attention calculation once it converges. This method doesn't require any additional training and it can speed up inference from 10-50%. T-GATE is also compatible with other optimization methods like [DeepCache](./deepcache).
Before you begin, make sure you install T-GATE.
```bash
pip install tgate
pip install -U torch diffusers transformers accelerate DeepCache
```
To use T-GATE with a pipeline, you need to use its corresponding loader.
| Pipeline | T-GATE Loader |
|---|---|
| PixArt | TgatePixArtLoader |
| Stable Diffusion XL | TgateSDXLLoader |
| Stable Diffusion XL + DeepCache | TgateSDXLDeepCacheLoader |
| Stable Diffusion | TgateSDLoader |
| Stable Diffusion + DeepCache | TgateSDDeepCacheLoader |
Next, create a `TgateLoader` with a pipeline, the gate step (the time step to stop calculating the cross attention), and the number of inference steps. Then call the `tgate` method on the pipeline with a prompt, gate step, and the number of inference steps.
Let's see how to enable this for several different pipelines.
<hfoptions id="pipelines">
<hfoption id="PixArt">
Accelerate `PixArtAlphaPipeline` with T-GATE:
```py
import torch
from diffusers import PixArtAlphaPipeline
from tgate import TgatePixArtLoader
pipe = PixArtAlphaPipeline.from_pretrained("PixArt-alpha/PixArt-XL-2-1024-MS", torch_dtype=torch.float16)
gate_step = 8
inference_step = 25
pipe = TgatePixArtLoader(
pipe,
gate_step=gate_step,
num_inference_steps=inference_step,
).to("cuda")
image = pipe.tgate(
"An alpaca made of colorful building blocks, cyberpunk.",
gate_step=gate_step,
num_inference_steps=inference_step,
).images[0]
```
</hfoption>
<hfoption id="Stable Diffusion XL">
Accelerate `StableDiffusionXLPipeline` with T-GATE:
```py
import torch
from diffusers import StableDiffusionXLPipeline
from diffusers import DPMSolverMultistepScheduler
from tgate import TgateSDXLLoader
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
torch_dtype=torch.float16,
variant="fp16",
use_safetensors=True,
)
pipe.scheduler = DPMSolverMultistepScheduler.from_config(pipe.scheduler.config)
gate_step = 10
inference_step = 25
pipe = TgateSDXLLoader(
pipe,
gate_step=gate_step,
num_inference_steps=inference_step,
).to("cuda")
image = pipe.tgate(
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
gate_step=gate_step,
num_inference_steps=inference_step
).images[0]
```
</hfoption>
<hfoption id="StableDiffusionXL with DeepCache">
Accelerate `StableDiffusionXLPipeline` with [DeepCache](https://github.com/horseee/DeepCache) and T-GATE:
```py
import torch
from diffusers import StableDiffusionXLPipeline
from diffusers import DPMSolverMultistepScheduler
from tgate import TgateSDXLDeepCacheLoader
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
torch_dtype=torch.float16,
variant="fp16",
use_safetensors=True,
)
pipe.scheduler = DPMSolverMultistepScheduler.from_config(pipe.scheduler.config)
gate_step = 10
inference_step = 25
pipe = TgateSDXLDeepCacheLoader(
pipe,
cache_interval=3,
cache_branch_id=0,
).to("cuda")
image = pipe.tgate(
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
gate_step=gate_step,
num_inference_steps=inference_step
).images[0]
```
</hfoption>
<hfoption id="Latent Consistency Model">
Accelerate `latent-consistency/lcm-sdxl` with T-GATE:
```py
import torch
from diffusers import StableDiffusionXLPipeline
from diffusers import UNet2DConditionModel, LCMScheduler
from diffusers import DPMSolverMultistepScheduler
from tgate import TgateSDXLLoader
unet = UNet2DConditionModel.from_pretrained(
"latent-consistency/lcm-sdxl",
torch_dtype=torch.float16,
variant="fp16",
)
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
unet=unet,
torch_dtype=torch.float16,
variant="fp16",
)
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
gate_step = 1
inference_step = 4
pipe = TgateSDXLLoader(
pipe,
gate_step=gate_step,
num_inference_steps=inference_step,
lcm=True
).to("cuda")
image = pipe.tgate(
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
gate_step=gate_step,
num_inference_steps=inference_step
).images[0]
```
</hfoption>
</hfoptions>
T-GATE also supports [`StableDiffusionPipeline`] and [PixArt-alpha/PixArt-LCM-XL-2-1024-MS](https://hf.co/PixArt-alpha/PixArt-LCM-XL-2-1024-MS).
## Benchmarks
| Model | MACs | Param | Latency | Zero-shot 10K-FID on MS-COCO |
|-----------------------|----------|-----------|---------|---------------------------|
| SD-1.5 | 16.938T | 859.520M | 7.032s | 23.927 |
| SD-1.5 w/ T-GATE | 9.875T | 815.557M | 4.313s | 20.789 |
| SD-2.1 | 38.041T | 865.785M | 16.121s | 22.609 |
| SD-2.1 w/ T-GATE | 22.208T | 815.433 M | 9.878s | 19.940 |
| SD-XL | 149.438T | 2.570B | 53.187s | 24.628 |
| SD-XL w/ T-GATE | 84.438T | 2.024B | 27.932s | 22.738 |
| Pixart-Alpha | 107.031T | 611.350M | 61.502s | 38.669 |
| Pixart-Alpha w/ T-GATE | 65.318T | 462.585M | 37.867s | 35.825 |
| DeepCache (SD-XL) | 57.888T | - | 19.931s | 23.755 |
| DeepCache w/ T-GATE | 43.868T | - | 14.666s | 23.999 |
| LCM (SD-XL) | 11.955T | 2.570B | 3.805s | 25.044 |
| LCM w/ T-GATE | 11.171T | 2.024B | 3.533s | 25.028 |
| LCM (Pixart-Alpha) | 8.563T | 611.350M | 4.733s | 36.086 |
| LCM w/ T-GATE | 7.623T | 462.585M | 4.543s | 37.048 |
The latency is tested on an NVIDIA 1080TI, MACs and Params are calculated with [calflops](https://github.com/MrYxJ/calculate-flops.pytorch), and the FID is calculated with [PytorchFID](https://github.com/mseitzer/pytorch-fid).
| diffusers/docs/source/en/optimization/tgate.md/0 | {
"file_path": "diffusers/docs/source/en/optimization/tgate.md",
"repo_id": "diffusers",
"token_count": 2963
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Accelerate inference of text-to-image diffusion models
Diffusion models are slower than their GAN counterparts because of the iterative and sequential reverse diffusion process. There are several techniques that can address this limitation such as progressive timestep distillation ([LCM LoRA](../using-diffusers/inference_with_lcm_lora)), model compression ([SSD-1B](https://huggingface.co/segmind/SSD-1B)), and reusing adjacent features of the denoiser ([DeepCache](../optimization/deepcache)).
However, you don't necessarily need to use these techniques to speed up inference. With PyTorch 2 alone, you can accelerate the inference latency of text-to-image diffusion pipelines by up to 3x. This tutorial will show you how to progressively apply the optimizations found in PyTorch 2 to reduce inference latency. You'll use the [Stable Diffusion XL (SDXL)](../using-diffusers/sdxl) pipeline in this tutorial, but these techniques are applicable to other text-to-image diffusion pipelines too.
Make sure you're using the latest version of Diffusers:
```bash
pip install -U diffusers
```
Then upgrade the other required libraries too:
```bash
pip install -U transformers accelerate peft
```
Install [PyTorch nightly](https://pytorch.org/) to benefit from the latest and fastest kernels:
```bash
pip3 install --pre torch --index-url https://download.pytorch.org/whl/nightly/cu121
```
> [!TIP]
> The results reported below are from a 80GB 400W A100 with its clock rate set to the maximum.
> If you're interested in the full benchmarking code, take a look at [huggingface/diffusion-fast](https://github.com/huggingface/diffusion-fast).
## Baseline
Let's start with a baseline. Disable reduced precision and the [`scaled_dot_product_attention` (SDPA)](../optimization/torch2.0#scaled-dot-product-attention) function which is automatically used by Diffusers:
```python
from diffusers import StableDiffusionXLPipeline
# Load the pipeline in full-precision and place its model components on CUDA.
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0"
).to("cuda")
# Run the attention ops without SDPA.
pipe.unet.set_default_attn_processor()
pipe.vae.set_default_attn_processor()
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipe(prompt, num_inference_steps=30).images[0]
```
This default setup takes 7.36 seconds.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/sayakpaul/sample-datasets/resolve/main/progressive-acceleration-sdxl/SDXL%2C_Batch_Size%3A_1%2C_Steps%3A_30_0.png" width=500>
</div>
## bfloat16
Enable the first optimization, reduced precision or more specifically bfloat16. There are several benefits of using reduced precision:
* Using a reduced numerical precision (such as float16 or bfloat16) for inference doesn’t affect the generation quality but significantly improves latency.
* The benefits of using bfloat16 compared to float16 are hardware dependent, but modern GPUs tend to favor bfloat16.
* bfloat16 is much more resilient when used with quantization compared to float16, but more recent versions of the quantization library ([torchao](https://github.com/pytorch-labs/ao)) we used don't have numerical issues with float16.
```python
from diffusers import StableDiffusionXLPipeline
import torch
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.bfloat16
).to("cuda")
# Run the attention ops without SDPA.
pipe.unet.set_default_attn_processor()
pipe.vae.set_default_attn_processor()
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipe(prompt, num_inference_steps=30).images[0]
```
bfloat16 reduces the latency from 7.36 seconds to 4.63 seconds.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/sayakpaul/sample-datasets/resolve/main/progressive-acceleration-sdxl/SDXL%2C_Batch_Size%3A_1%2C_Steps%3A_30_1.png" width=500>
</div>
<Tip>
In our later experiments with float16, recent versions of torchao do not incur numerical problems from float16.
</Tip>
Take a look at the [Speed up inference](../optimization/fp16) guide to learn more about running inference with reduced precision.
## SDPA
Attention blocks are intensive to run. But with PyTorch's [`scaled_dot_product_attention`](../optimization/torch2.0#scaled-dot-product-attention) function, it is a lot more efficient. This function is used by default in Diffusers so you don't need to make any changes to the code.
```python
from diffusers import StableDiffusionXLPipeline
import torch
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.bfloat16
).to("cuda")
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipe(prompt, num_inference_steps=30).images[0]
```
Scaled dot product attention improves the latency from 4.63 seconds to 3.31 seconds.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/sayakpaul/sample-datasets/resolve/main/progressive-acceleration-sdxl/SDXL%2C_Batch_Size%3A_1%2C_Steps%3A_30_2.png" width=500>
</div>
## torch.compile
PyTorch 2 includes `torch.compile` which uses fast and optimized kernels. In Diffusers, the UNet and VAE are usually compiled because these are the most compute-intensive modules. First, configure a few compiler flags (refer to the [full list](https://github.com/pytorch/pytorch/blob/main/torch/_inductor/config.py) for more options):
```python
from diffusers import StableDiffusionXLPipeline
import torch
torch._inductor.config.conv_1x1_as_mm = True
torch._inductor.config.coordinate_descent_tuning = True
torch._inductor.config.epilogue_fusion = False
torch._inductor.config.coordinate_descent_check_all_directions = True
```
It is also important to change the UNet and VAE's memory layout to "channels_last" when compiling them to ensure maximum speed.
```python
pipe.unet.to(memory_format=torch.channels_last)
pipe.vae.to(memory_format=torch.channels_last)
```
Now compile and perform inference:
```python
# Compile the UNet and VAE.
pipe.unet = torch.compile(pipe.unet, mode="max-autotune", fullgraph=True)
pipe.vae.decode = torch.compile(pipe.vae.decode, mode="max-autotune", fullgraph=True)
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
# First call to `pipe` is slow, subsequent ones are faster.
image = pipe(prompt, num_inference_steps=30).images[0]
```
`torch.compile` offers different backends and modes. For maximum inference speed, use "max-autotune" for the inductor backend. “max-autotune” uses CUDA graphs and optimizes the compilation graph specifically for latency. CUDA graphs greatly reduces the overhead of launching GPU operations by using a mechanism to launch multiple GPU operations through a single CPU operation.
Using SDPA attention and compiling both the UNet and VAE cuts the latency from 3.31 seconds to 2.54 seconds.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/sayakpaul/sample-datasets/resolve/main/progressive-acceleration-sdxl/SDXL%2C_Batch_Size%3A_1%2C_Steps%3A_30_3.png" width=500>
</div>
> [!TIP]
> From PyTorch 2.3.1, you can control the caching behavior of `torch.compile()`. This is particularly beneficial for compilation modes like `"max-autotune"` which performs a grid-search over several compilation flags to find the optimal configuration. Learn more in the [Compile Time Caching in torch.compile](https://pytorch.org/tutorials/recipes/torch_compile_caching_tutorial.html) tutorial.
### Prevent graph breaks
Specifying `fullgraph=True` ensures there are no graph breaks in the underlying model to take full advantage of `torch.compile` without any performance degradation. For the UNet and VAE, this means changing how you access the return variables.
```diff
- latents = unet(
- latents, timestep=timestep, encoder_hidden_states=prompt_embeds
-).sample
+ latents = unet(
+ latents, timestep=timestep, encoder_hidden_states=prompt_embeds, return_dict=False
+)[0]
```
### Remove GPU sync after compilation
During the iterative reverse diffusion process, the `step()` function is [called](https://github.com/huggingface/diffusers/blob/1d686bac8146037e97f3fd8c56e4063230f71751/src/diffusers/pipelines/stable_diffusion_xl/pipeline_stable_diffusion_xl.py#L1228) on the scheduler each time after the denoiser predicts the less noisy latent embeddings. Inside `step()`, the `sigmas` variable is [indexed](https://github.com/huggingface/diffusers/blob/1d686bac8146037e97f3fd8c56e4063230f71751/src/diffusers/schedulers/scheduling_euler_discrete.py#L476) which when placed on the GPU, causes a communication sync between the CPU and GPU. This introduces latency and it becomes more evident when the denoiser has already been compiled.
But if the `sigmas` array always [stays on the CPU](https://github.com/huggingface/diffusers/blob/35a969d297cba69110d175ee79c59312b9f49e1e/src/diffusers/schedulers/scheduling_euler_discrete.py#L240), the CPU and GPU sync doesn’t occur and you don't get any latency. In general, any CPU and GPU communication sync should be none or be kept to a bare minimum because it can impact inference latency.
## Combine the attention block's projection matrices
The UNet and VAE in SDXL use Transformer-like blocks which consists of attention blocks and feed-forward blocks.
In an attention block, the input is projected into three sub-spaces using three different projection matrices – Q, K, and V. These projections are performed separately on the input. But we can horizontally combine the projection matrices into a single matrix and perform the projection in one step. This increases the size of the matrix multiplications of the input projections and improves the impact of quantization.
You can combine the projection matrices with just a single line of code:
```python
pipe.fuse_qkv_projections()
```
This provides a minor improvement from 2.54 seconds to 2.52 seconds.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/sayakpaul/sample-datasets/resolve/main/progressive-acceleration-sdxl/SDXL%2C_Batch_Size%3A_1%2C_Steps%3A_30_4.png" width=500>
</div>
<Tip warning={true}>
Support for [`~StableDiffusionXLPipeline.fuse_qkv_projections`] is limited and experimental. It's not available for many non-Stable Diffusion pipelines such as [Kandinsky](../using-diffusers/kandinsky). You can refer to this [PR](https://github.com/huggingface/diffusers/pull/6179) to get an idea about how to enable this for the other pipelines.
</Tip>
## Dynamic quantization
You can also use the ultra-lightweight PyTorch quantization library, [torchao](https://github.com/pytorch-labs/ao) (commit SHA `54bcd5a10d0abbe7b0c045052029257099f83fd9`), to apply [dynamic int8 quantization](https://pytorch.org/tutorials/recipes/recipes/dynamic_quantization.html) to the UNet and VAE. Quantization adds additional conversion overhead to the model that is hopefully made up for by faster matmuls (dynamic quantization). If the matmuls are too small, these techniques may degrade performance.
First, configure all the compiler tags:
```python
from diffusers import StableDiffusionXLPipeline
import torch
# Notice the two new flags at the end.
torch._inductor.config.conv_1x1_as_mm = True
torch._inductor.config.coordinate_descent_tuning = True
torch._inductor.config.epilogue_fusion = False
torch._inductor.config.coordinate_descent_check_all_directions = True
torch._inductor.config.force_fuse_int_mm_with_mul = True
torch._inductor.config.use_mixed_mm = True
```
Certain linear layers in the UNet and VAE don’t benefit from dynamic int8 quantization. You can filter out those layers with the [`dynamic_quant_filter_fn`](https://github.com/huggingface/diffusion-fast/blob/0f169640b1db106fe6a479f78c1ed3bfaeba3386/utils/pipeline_utils.py#L16) shown below.
```python
def dynamic_quant_filter_fn(mod, *args):
return (
isinstance(mod, torch.nn.Linear)
and mod.in_features > 16
and (mod.in_features, mod.out_features)
not in [
(1280, 640),
(1920, 1280),
(1920, 640),
(2048, 1280),
(2048, 2560),
(2560, 1280),
(256, 128),
(2816, 1280),
(320, 640),
(512, 1536),
(512, 256),
(512, 512),
(640, 1280),
(640, 1920),
(640, 320),
(640, 5120),
(640, 640),
(960, 320),
(960, 640),
]
)
def conv_filter_fn(mod, *args):
return (
isinstance(mod, torch.nn.Conv2d) and mod.kernel_size == (1, 1) and 128 in [mod.in_channels, mod.out_channels]
)
```
Finally, apply all the optimizations discussed so far:
```python
# SDPA + bfloat16.
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.bfloat16
).to("cuda")
# Combine attention projection matrices.
pipe.fuse_qkv_projections()
# Change the memory layout.
pipe.unet.to(memory_format=torch.channels_last)
pipe.vae.to(memory_format=torch.channels_last)
```
Since dynamic quantization is only limited to the linear layers, convert the appropriate pointwise convolution layers into linear layers to maximize its benefit.
```python
from torchao import swap_conv2d_1x1_to_linear
swap_conv2d_1x1_to_linear(pipe.unet, conv_filter_fn)
swap_conv2d_1x1_to_linear(pipe.vae, conv_filter_fn)
```
Apply dynamic quantization:
```python
from torchao import apply_dynamic_quant
apply_dynamic_quant(pipe.unet, dynamic_quant_filter_fn)
apply_dynamic_quant(pipe.vae, dynamic_quant_filter_fn)
```
Finally, compile and perform inference:
```python
pipe.unet = torch.compile(pipe.unet, mode="max-autotune", fullgraph=True)
pipe.vae.decode = torch.compile(pipe.vae.decode, mode="max-autotune", fullgraph=True)
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipe(prompt, num_inference_steps=30).images[0]
```
Applying dynamic quantization improves the latency from 2.52 seconds to 2.43 seconds.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/sayakpaul/sample-datasets/resolve/main/progressive-acceleration-sdxl/SDXL%2C_Batch_Size%3A_1%2C_Steps%3A_30_5.png" width=500>
</div>
| diffusers/docs/source/en/tutorials/fast_diffusion.md/0 | {
"file_path": "diffusers/docs/source/en/tutorials/fast_diffusion.md",
"repo_id": "diffusers",
"token_count": 4972
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Latent Consistency Model
[[open-in-colab]]
[Latent Consistency Models (LCMs)](https://hf.co/papers/2310.04378) enable fast high-quality image generation by directly predicting the reverse diffusion process in the latent rather than pixel space. In other words, LCMs try to predict the noiseless image from the noisy image in contrast to typical diffusion models that iteratively remove noise from the noisy image. By avoiding the iterative sampling process, LCMs are able to generate high-quality images in 2-4 steps instead of 20-30 steps.
LCMs are distilled from pretrained models which requires ~32 hours of A100 compute. To speed this up, [LCM-LoRAs](https://hf.co/papers/2311.05556) train a [LoRA adapter](https://huggingface.co/docs/peft/conceptual_guides/adapter#low-rank-adaptation-lora) which have much fewer parameters to train compared to the full model. The LCM-LoRA can be plugged into a diffusion model once it has been trained.
This guide will show you how to use LCMs and LCM-LoRAs for fast inference on tasks and how to use them with other adapters like ControlNet or T2I-Adapter.
> [!TIP]
> LCMs and LCM-LoRAs are available for Stable Diffusion v1.5, Stable Diffusion XL, and the SSD-1B model. You can find their checkpoints on the [Latent Consistency](https://hf.co/collections/latent-consistency/latent-consistency-models-weights-654ce61a95edd6dffccef6a8) Collections.
## Text-to-image
<hfoptions id="lcm-text2img">
<hfoption id="LCM">
To use LCMs, you need to load the LCM checkpoint for your supported model into [`UNet2DConditionModel`] and replace the scheduler with the [`LCMScheduler`]. Then you can use the pipeline as usual, and pass a text prompt to generate an image in just 4 steps.
A couple of notes to keep in mind when using LCMs are:
* Typically, batch size is doubled inside the pipeline for classifier-free guidance. But LCM applies guidance with guidance embeddings and doesn't need to double the batch size, which leads to faster inference. The downside is that negative prompts don't work with LCM because they don't have any effect on the denoising process.
* The ideal range for `guidance_scale` is [3., 13.] because that is what the UNet was trained with. However, disabling `guidance_scale` with a value of 1.0 is also effective in most cases.
```python
from diffusers import StableDiffusionXLPipeline, UNet2DConditionModel, LCMScheduler
import torch
unet = UNet2DConditionModel.from_pretrained(
"latent-consistency/lcm-sdxl",
torch_dtype=torch.float16,
variant="fp16",
)
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", unet=unet, torch_dtype=torch.float16, variant="fp16",
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
prompt = "Self-portrait oil painting, a beautiful cyborg with golden hair, 8k"
generator = torch.manual_seed(0)
image = pipe(
prompt=prompt, num_inference_steps=4, generator=generator, guidance_scale=8.0
).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm/lcm_full_sdxl_t2i.png"/>
</div>
</hfoption>
<hfoption id="LCM-LoRA">
To use LCM-LoRAs, you need to replace the scheduler with the [`LCMScheduler`] and load the LCM-LoRA weights with the [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] method. Then you can use the pipeline as usual, and pass a text prompt to generate an image in just 4 steps.
A couple of notes to keep in mind when using LCM-LoRAs are:
* Typically, batch size is doubled inside the pipeline for classifier-free guidance. But LCM applies guidance with guidance embeddings and doesn't need to double the batch size, which leads to faster inference. The downside is that negative prompts don't work with LCM because they don't have any effect on the denoising process.
* You could use guidance with LCM-LoRAs, but it is very sensitive to high `guidance_scale` values and can lead to artifacts in the generated image. The best values we've found are between [1.0, 2.0].
* Replace [stabilityai/stable-diffusion-xl-base-1.0](https://hf.co/stabilityai/stable-diffusion-xl-base-1.0) with any finetuned model. For example, try using the [animagine-xl](https://huggingface.co/Linaqruf/animagine-xl) checkpoint to generate anime images with SDXL.
```py
import torch
from diffusers import DiffusionPipeline, LCMScheduler
pipe = DiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
variant="fp16",
torch_dtype=torch.float16
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights("latent-consistency/lcm-lora-sdxl")
prompt = "Self-portrait oil painting, a beautiful cyborg with golden hair, 8k"
generator = torch.manual_seed(42)
image = pipe(
prompt=prompt, num_inference_steps=4, generator=generator, guidance_scale=1.0
).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm/lcm_sdxl_t2i.png"/>
</div>
</hfoption>
</hfoptions>
## Image-to-image
<hfoptions id="lcm-img2img">
<hfoption id="LCM">
To use LCMs for image-to-image, you need to load the LCM checkpoint for your supported model into [`UNet2DConditionModel`] and replace the scheduler with the [`LCMScheduler`]. Then you can use the pipeline as usual, and pass a text prompt and initial image to generate an image in just 4 steps.
> [!TIP]
> Experiment with different values for `num_inference_steps`, `strength`, and `guidance_scale` to get the best results.
```python
import torch
from diffusers import AutoPipelineForImage2Image, UNet2DConditionModel, LCMScheduler
from diffusers.utils import load_image
unet = UNet2DConditionModel.from_pretrained(
"SimianLuo/LCM_Dreamshaper_v7",
subfolder="unet",
torch_dtype=torch.float16,
)
pipe = AutoPipelineForImage2Image.from_pretrained(
"Lykon/dreamshaper-7",
unet=unet,
torch_dtype=torch.float16,
variant="fp16",
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
init_image = load_image("https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/img2img-init.png")
prompt = "Astronauts in a jungle, cold color palette, muted colors, detailed, 8k"
generator = torch.manual_seed(0)
image = pipe(
prompt,
image=init_image,
num_inference_steps=4,
guidance_scale=7.5,
strength=0.5,
generator=generator
).images[0]
image
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/img2img-init.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">initial image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm-img2img.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">generated image</figcaption>
</div>
</div>
</hfoption>
<hfoption id="LCM-LoRA">
To use LCM-LoRAs for image-to-image, you need to replace the scheduler with the [`LCMScheduler`] and load the LCM-LoRA weights with the [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] method. Then you can use the pipeline as usual, and pass a text prompt and initial image to generate an image in just 4 steps.
> [!TIP]
> Experiment with different values for `num_inference_steps`, `strength`, and `guidance_scale` to get the best results.
```py
import torch
from diffusers import AutoPipelineForImage2Image, LCMScheduler
from diffusers.utils import make_image_grid, load_image
pipe = AutoPipelineForImage2Image.from_pretrained(
"Lykon/dreamshaper-7",
torch_dtype=torch.float16,
variant="fp16",
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights("latent-consistency/lcm-lora-sdv1-5")
init_image = load_image("https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/img2img-init.png")
prompt = "Astronauts in a jungle, cold color palette, muted colors, detailed, 8k"
generator = torch.manual_seed(0)
image = pipe(
prompt,
image=init_image,
num_inference_steps=4,
guidance_scale=1,
strength=0.6,
generator=generator
).images[0]
image
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/img2img-init.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">initial image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm-lora-img2img.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">generated image</figcaption>
</div>
</div>
</hfoption>
</hfoptions>
## Inpainting
To use LCM-LoRAs for inpainting, you need to replace the scheduler with the [`LCMScheduler`] and load the LCM-LoRA weights with the [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] method. Then you can use the pipeline as usual, and pass a text prompt, initial image, and mask image to generate an image in just 4 steps.
```py
import torch
from diffusers import AutoPipelineForInpainting, LCMScheduler
from diffusers.utils import load_image, make_image_grid
pipe = AutoPipelineForInpainting.from_pretrained(
"runwayml/stable-diffusion-inpainting",
torch_dtype=torch.float16,
variant="fp16",
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights("latent-consistency/lcm-lora-sdv1-5")
init_image = load_image("https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/inpaint.png")
mask_image = load_image("https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/inpaint_mask.png")
prompt = "concept art digital painting of an elven castle, inspired by lord of the rings, highly detailed, 8k"
generator = torch.manual_seed(0)
image = pipe(
prompt=prompt,
image=init_image,
mask_image=mask_image,
generator=generator,
num_inference_steps=4,
guidance_scale=4,
).images[0]
image
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/inpaint.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">initial image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm-lora-inpaint.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">generated image</figcaption>
</div>
</div>
## Adapters
LCMs are compatible with adapters like LoRA, ControlNet, T2I-Adapter, and AnimateDiff. You can bring the speed of LCMs to these adapters to generate images in a certain style or condition the model on another input like a canny image.
### LoRA
[LoRA](../using-diffusers/loading_adapters#lora) adapters can be rapidly finetuned to learn a new style from just a few images and plugged into a pretrained model to generate images in that style.
<hfoptions id="lcm-lora">
<hfoption id="LCM">
Load the LCM checkpoint for your supported model into [`UNet2DConditionModel`] and replace the scheduler with the [`LCMScheduler`]. Then you can use the [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] method to load the LoRA weights into the LCM and generate a styled image in a few steps.
```python
from diffusers import StableDiffusionXLPipeline, UNet2DConditionModel, LCMScheduler
import torch
unet = UNet2DConditionModel.from_pretrained(
"latent-consistency/lcm-sdxl",
torch_dtype=torch.float16,
variant="fp16",
)
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", unet=unet, torch_dtype=torch.float16, variant="fp16",
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights("TheLastBen/Papercut_SDXL", weight_name="papercut.safetensors", adapter_name="papercut")
prompt = "papercut, a cute fox"
generator = torch.manual_seed(0)
image = pipe(
prompt=prompt, num_inference_steps=4, generator=generator, guidance_scale=8.0
).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm/lcm_full_sdx_lora_mix.png"/>
</div>
</hfoption>
<hfoption id="LCM-LoRA">
Replace the scheduler with the [`LCMScheduler`]. Then you can use the [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] method to load the LCM-LoRA weights and the style LoRA you want to use. Combine both LoRA adapters with the [`~loaders.UNet2DConditionLoadersMixin.set_adapters`] method and generate a styled image in a few steps.
```py
import torch
from diffusers import DiffusionPipeline, LCMScheduler
pipe = DiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
variant="fp16",
torch_dtype=torch.float16
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights("latent-consistency/lcm-lora-sdxl", adapter_name="lcm")
pipe.load_lora_weights("TheLastBen/Papercut_SDXL", weight_name="papercut.safetensors", adapter_name="papercut")
pipe.set_adapters(["lcm", "papercut"], adapter_weights=[1.0, 0.8])
prompt = "papercut, a cute fox"
generator = torch.manual_seed(0)
image = pipe(prompt, num_inference_steps=4, guidance_scale=1, generator=generator).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm/lcm_sdx_lora_mix.png"/>
</div>
</hfoption>
</hfoptions>
### ControlNet
[ControlNet](./controlnet) are adapters that can be trained on a variety of inputs like canny edge, pose estimation, or depth. The ControlNet can be inserted into the pipeline to provide additional conditioning and control to the model for more accurate generation.
You can find additional ControlNet models trained on other inputs in [lllyasviel's](https://hf.co/lllyasviel) repository.
<hfoptions id="lcm-controlnet">
<hfoption id="LCM">
Load a ControlNet model trained on canny images and pass it to the [`ControlNetModel`]. Then you can load a LCM model into [`StableDiffusionControlNetPipeline`] and replace the scheduler with the [`LCMScheduler`]. Now pass the canny image to the pipeline and generate an image.
> [!TIP]
> Experiment with different values for `num_inference_steps`, `controlnet_conditioning_scale`, `cross_attention_kwargs`, and `guidance_scale` to get the best results.
```python
import torch
import cv2
import numpy as np
from PIL import Image
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel, LCMScheduler
from diffusers.utils import load_image, make_image_grid
image = load_image(
"https://hf.co/datasets/huggingface/documentation-images/resolve/main/diffusers/input_image_vermeer.png"
).resize((512, 512))
image = np.array(image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image)
controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-canny", torch_dtype=torch.float16)
pipe = StableDiffusionControlNetPipeline.from_pretrained(
"SimianLuo/LCM_Dreamshaper_v7",
controlnet=controlnet,
torch_dtype=torch.float16,
safety_checker=None,
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
generator = torch.manual_seed(0)
image = pipe(
"the mona lisa",
image=canny_image,
num_inference_steps=4,
generator=generator,
).images[0]
make_image_grid([canny_image, image], rows=1, cols=2)
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm/lcm_full_sdv1-5_controlnet.png"/>
</div>
</hfoption>
<hfoption id="LCM-LoRA">
Load a ControlNet model trained on canny images and pass it to the [`ControlNetModel`]. Then you can load a Stable Diffusion v1.5 model into [`StableDiffusionControlNetPipeline`] and replace the scheduler with the [`LCMScheduler`]. Use the [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] method to load the LCM-LoRA weights, and pass the canny image to the pipeline and generate an image.
> [!TIP]
> Experiment with different values for `num_inference_steps`, `controlnet_conditioning_scale`, `cross_attention_kwargs`, and `guidance_scale` to get the best results.
```py
import torch
import cv2
import numpy as np
from PIL import Image
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel, LCMScheduler
from diffusers.utils import load_image
image = load_image(
"https://hf.co/datasets/huggingface/documentation-images/resolve/main/diffusers/input_image_vermeer.png"
).resize((512, 512))
image = np.array(image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image)
controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-canny", torch_dtype=torch.float16)
pipe = StableDiffusionControlNetPipeline.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5",
controlnet=controlnet,
torch_dtype=torch.float16,
safety_checker=None,
variant="fp16"
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights("latent-consistency/lcm-lora-sdv1-5")
generator = torch.manual_seed(0)
image = pipe(
"the mona lisa",
image=canny_image,
num_inference_steps=4,
guidance_scale=1.5,
controlnet_conditioning_scale=0.8,
cross_attention_kwargs={"scale": 1},
generator=generator,
).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm/lcm_sdv1-5_controlnet.png"/>
</div>
</hfoption>
</hfoptions>
### T2I-Adapter
[T2I-Adapter](./t2i_adapter) is an even more lightweight adapter than ControlNet, that provides an additional input to condition a pretrained model with. It is faster than ControlNet but the results may be slightly worse.
You can find additional T2I-Adapter checkpoints trained on other inputs in [TencentArc's](https://hf.co/TencentARC) repository.
<hfoptions id="lcm-t2i">
<hfoption id="LCM">
Load a T2IAdapter trained on canny images and pass it to the [`StableDiffusionXLAdapterPipeline`]. Then load a LCM checkpoint into [`UNet2DConditionModel`] and replace the scheduler with the [`LCMScheduler`]. Now pass the canny image to the pipeline and generate an image.
```python
import torch
import cv2
import numpy as np
from PIL import Image
from diffusers import StableDiffusionXLAdapterPipeline, UNet2DConditionModel, T2IAdapter, LCMScheduler
from diffusers.utils import load_image, make_image_grid
# detect the canny map in low resolution to avoid high-frequency details
image = load_image(
"https://hf.co/datasets/huggingface/documentation-images/resolve/main/diffusers/input_image_vermeer.png"
).resize((384, 384))
image = np.array(image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image).resize((1024, 1216))
adapter = T2IAdapter.from_pretrained("TencentARC/t2i-adapter-canny-sdxl-1.0", torch_dtype=torch.float16, varient="fp16").to("cuda")
unet = UNet2DConditionModel.from_pretrained(
"latent-consistency/lcm-sdxl",
torch_dtype=torch.float16,
variant="fp16",
)
pipe = StableDiffusionXLAdapterPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
unet=unet,
adapter=adapter,
torch_dtype=torch.float16,
variant="fp16",
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
prompt = "the mona lisa, 4k picture, high quality"
negative_prompt = "extra digit, fewer digits, cropped, worst quality, low quality, glitch, deformed, mutated, ugly, disfigured"
generator = torch.manual_seed(0)
image = pipe(
prompt=prompt,
negative_prompt=negative_prompt,
image=canny_image,
num_inference_steps=4,
guidance_scale=5,
adapter_conditioning_scale=0.8,
adapter_conditioning_factor=1,
generator=generator,
).images[0]
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm-t2i.png"/>
</div>
</hfoption>
<hfoption id="LCM-LoRA">
Load a T2IAdapter trained on canny images and pass it to the [`StableDiffusionXLAdapterPipeline`]. Replace the scheduler with the [`LCMScheduler`], and use the [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] method to load the LCM-LoRA weights. Pass the canny image to the pipeline and generate an image.
```py
import torch
import cv2
import numpy as np
from PIL import Image
from diffusers import StableDiffusionXLAdapterPipeline, UNet2DConditionModel, T2IAdapter, LCMScheduler
from diffusers.utils import load_image, make_image_grid
# detect the canny map in low resolution to avoid high-frequency details
image = load_image(
"https://hf.co/datasets/huggingface/documentation-images/resolve/main/diffusers/input_image_vermeer.png"
).resize((384, 384))
image = np.array(image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image).resize((1024, 1024))
adapter = T2IAdapter.from_pretrained("TencentARC/t2i-adapter-canny-sdxl-1.0", torch_dtype=torch.float16, varient="fp16").to("cuda")
pipe = StableDiffusionXLAdapterPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
adapter=adapter,
torch_dtype=torch.float16,
variant="fp16",
).to("cuda")
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights("latent-consistency/lcm-lora-sdxl")
prompt = "the mona lisa, 4k picture, high quality"
negative_prompt = "extra digit, fewer digits, cropped, worst quality, low quality, glitch, deformed, mutated, ugly, disfigured"
generator = torch.manual_seed(0)
image = pipe(
prompt=prompt,
negative_prompt=negative_prompt,
image=canny_image,
num_inference_steps=4,
guidance_scale=1.5,
adapter_conditioning_scale=0.8,
adapter_conditioning_factor=1,
generator=generator,
).images[0]
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm-lora-t2i.png"/>
</div>
</hfoption>
</hfoptions>
### AnimateDiff
[AnimateDiff](../api/pipelines/animatediff) is an adapter that adds motion to an image. It can be used with most Stable Diffusion models, effectively turning them into "video generation" models. Generating good results with a video model usually requires generating multiple frames (16-24), which can be very slow with a regular Stable Diffusion model. LCM-LoRA can speed up this process by only taking 4-8 steps for each frame.
Load a [`AnimateDiffPipeline`] and pass a [`MotionAdapter`] to it. Then replace the scheduler with the [`LCMScheduler`], and combine both LoRA adapters with the [`~loaders.UNet2DConditionLoadersMixin.set_adapters`] method. Now you can pass a prompt to the pipeline and generate an animated image.
```py
import torch
from diffusers import MotionAdapter, AnimateDiffPipeline, DDIMScheduler, LCMScheduler
from diffusers.utils import export_to_gif
adapter = MotionAdapter.from_pretrained("guoyww/animatediff-motion-adapter-v1-5")
pipe = AnimateDiffPipeline.from_pretrained(
"frankjoshua/toonyou_beta6",
motion_adapter=adapter,
).to("cuda")
# set scheduler
pipe.scheduler = LCMScheduler.from_config(pipe.scheduler.config)
# load LCM-LoRA
pipe.load_lora_weights("latent-consistency/lcm-lora-sdv1-5", adapter_name="lcm")
pipe.load_lora_weights("guoyww/animatediff-motion-lora-zoom-in", weight_name="diffusion_pytorch_model.safetensors", adapter_name="motion-lora")
pipe.set_adapters(["lcm", "motion-lora"], adapter_weights=[0.55, 1.2])
prompt = "best quality, masterpiece, 1girl, looking at viewer, blurry background, upper body, contemporary, dress"
generator = torch.manual_seed(0)
frames = pipe(
prompt=prompt,
num_inference_steps=5,
guidance_scale=1.25,
cross_attention_kwargs={"scale": 1},
num_frames=24,
generator=generator
).frames[0]
export_to_gif(frames, "animation.gif")
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lcm-lora-animatediff.gif"/>
</div>
| diffusers/docs/source/en/using-diffusers/inference_with_lcm.md/0 | {
"file_path": "diffusers/docs/source/en/using-diffusers/inference_with_lcm.md",
"repo_id": "diffusers",
"token_count": 9016
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Stable Diffusion XL
[[open-in-colab]]
[Stable Diffusion XL](https://huggingface.co/papers/2307.01952) (SDXL) is a powerful text-to-image generation model that iterates on the previous Stable Diffusion models in three key ways:
1. the UNet is 3x larger and SDXL combines a second text encoder (OpenCLIP ViT-bigG/14) with the original text encoder to significantly increase the number of parameters
2. introduces size and crop-conditioning to preserve training data from being discarded and gain more control over how a generated image should be cropped
3. introduces a two-stage model process; the *base* model (can also be run as a standalone model) generates an image as an input to the *refiner* model which adds additional high-quality details
This guide will show you how to use SDXL for text-to-image, image-to-image, and inpainting.
Before you begin, make sure you have the following libraries installed:
```py
# uncomment to install the necessary libraries in Colab
#!pip install -q diffusers transformers accelerate invisible-watermark>=0.2.0
```
<Tip warning={true}>
We recommend installing the [invisible-watermark](https://pypi.org/project/invisible-watermark/) library to help identify images that are generated. If the invisible-watermark library is installed, it is used by default. To disable the watermarker:
```py
pipeline = StableDiffusionXLPipeline.from_pretrained(..., add_watermarker=False)
```
</Tip>
## Load model checkpoints
Model weights may be stored in separate subfolders on the Hub or locally, in which case, you should use the [`~StableDiffusionXLPipeline.from_pretrained`] method:
```py
from diffusers import StableDiffusionXLPipeline, StableDiffusionXLImg2ImgPipeline
import torch
pipeline = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
refiner = StableDiffusionXLImg2ImgPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-refiner-1.0", torch_dtype=torch.float16, use_safetensors=True, variant="fp16"
).to("cuda")
```
You can also use the [`~StableDiffusionXLPipeline.from_single_file`] method to load a model checkpoint stored in a single file format (`.ckpt` or `.safetensors`) from the Hub or locally:
```py
from diffusers import StableDiffusionXLPipeline, StableDiffusionXLImg2ImgPipeline
import torch
pipeline = StableDiffusionXLPipeline.from_single_file(
"https://huggingface.co/stabilityai/stable-diffusion-xl-base-1.0/blob/main/sd_xl_base_1.0.safetensors",
torch_dtype=torch.float16
).to("cuda")
refiner = StableDiffusionXLImg2ImgPipeline.from_single_file(
"https://huggingface.co/stabilityai/stable-diffusion-xl-refiner-1.0/blob/main/sd_xl_refiner_1.0.safetensors", torch_dtype=torch.float16
).to("cuda")
```
## Text-to-image
For text-to-image, pass a text prompt. By default, SDXL generates a 1024x1024 image for the best results. You can try setting the `height` and `width` parameters to 768x768 or 512x512, but anything below 512x512 is not likely to work.
```py
from diffusers import AutoPipelineForText2Image
import torch
pipeline_text2image = AutoPipelineForText2Image.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipeline_text2image(prompt=prompt).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-text2img.png" alt="generated image of an astronaut in a jungle"/>
</div>
## Image-to-image
For image-to-image, SDXL works especially well with image sizes between 768x768 and 1024x1024. Pass an initial image, and a text prompt to condition the image with:
```py
from diffusers import AutoPipelineForImage2Image
from diffusers.utils import load_image, make_image_grid
# use from_pipe to avoid consuming additional memory when loading a checkpoint
pipeline = AutoPipelineForImage2Image.from_pipe(pipeline_text2image).to("cuda")
url = "https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-text2img.png"
init_image = load_image(url)
prompt = "a dog catching a frisbee in the jungle"
image = pipeline(prompt, image=init_image, strength=0.8, guidance_scale=10.5).images[0]
make_image_grid([init_image, image], rows=1, cols=2)
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-img2img.png" alt="generated image of a dog catching a frisbee in a jungle"/>
</div>
## Inpainting
For inpainting, you'll need the original image and a mask of what you want to replace in the original image. Create a prompt to describe what you want to replace the masked area with.
```py
from diffusers import AutoPipelineForInpainting
from diffusers.utils import load_image, make_image_grid
# use from_pipe to avoid consuming additional memory when loading a checkpoint
pipeline = AutoPipelineForInpainting.from_pipe(pipeline_text2image).to("cuda")
img_url = "https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-text2img.png"
mask_url = "https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-inpaint-mask.png"
init_image = load_image(img_url)
mask_image = load_image(mask_url)
prompt = "A deep sea diver floating"
image = pipeline(prompt=prompt, image=init_image, mask_image=mask_image, strength=0.85, guidance_scale=12.5).images[0]
make_image_grid([init_image, mask_image, image], rows=1, cols=3)
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-inpaint.png" alt="generated image of a deep sea diver in a jungle"/>
</div>
## Refine image quality
SDXL includes a [refiner model](https://huggingface.co/stabilityai/stable-diffusion-xl-refiner-1.0) specialized in denoising low-noise stage images to generate higher-quality images from the base model. There are two ways to use the refiner:
1. use the base and refiner models together to produce a refined image
2. use the base model to produce an image, and subsequently use the refiner model to add more details to the image (this is how SDXL was originally trained)
### Base + refiner model
When you use the base and refiner model together to generate an image, this is known as an [*ensemble of expert denoisers*](https://research.nvidia.com/labs/dir/eDiff-I/). The ensemble of expert denoisers approach requires fewer overall denoising steps versus passing the base model's output to the refiner model, so it should be significantly faster to run. However, you won't be able to inspect the base model's output because it still contains a large amount of noise.
As an ensemble of expert denoisers, the base model serves as the expert during the high-noise diffusion stage and the refiner model serves as the expert during the low-noise diffusion stage. Load the base and refiner model:
```py
from diffusers import DiffusionPipeline
import torch
base = DiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
refiner = DiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-refiner-1.0",
text_encoder_2=base.text_encoder_2,
vae=base.vae,
torch_dtype=torch.float16,
use_safetensors=True,
variant="fp16",
).to("cuda")
```
To use this approach, you need to define the number of timesteps for each model to run through their respective stages. For the base model, this is controlled by the [`denoising_end`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/stable_diffusion_xl#diffusers.StableDiffusionXLPipeline.__call__.denoising_end) parameter and for the refiner model, it is controlled by the [`denoising_start`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/stable_diffusion_xl#diffusers.StableDiffusionXLImg2ImgPipeline.__call__.denoising_start) parameter.
<Tip>
The `denoising_end` and `denoising_start` parameters should be a float between 0 and 1. These parameters are represented as a proportion of discrete timesteps as defined by the scheduler. If you're also using the `strength` parameter, it'll be ignored because the number of denoising steps is determined by the discrete timesteps the model is trained on and the declared fractional cutoff.
</Tip>
Let's set `denoising_end=0.8` so the base model performs the first 80% of denoising the **high-noise** timesteps and set `denoising_start=0.8` so the refiner model performs the last 20% of denoising the **low-noise** timesteps. The base model output should be in **latent** space instead of a PIL image.
```py
prompt = "A majestic lion jumping from a big stone at night"
image = base(
prompt=prompt,
num_inference_steps=40,
denoising_end=0.8,
output_type="latent",
).images
image = refiner(
prompt=prompt,
num_inference_steps=40,
denoising_start=0.8,
image=image,
).images[0]
image
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lion_base.png" alt="generated image of a lion on a rock at night" />
<figcaption class="mt-2 text-center text-sm text-gray-500">default base model</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lion_refined.png" alt="generated image of a lion on a rock at night in higher quality" />
<figcaption class="mt-2 text-center text-sm text-gray-500">ensemble of expert denoisers</figcaption>
</div>
</div>
The refiner model can also be used for inpainting in the [`StableDiffusionXLInpaintPipeline`]:
```py
from diffusers import StableDiffusionXLInpaintPipeline
from diffusers.utils import load_image, make_image_grid
import torch
base = StableDiffusionXLInpaintPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
refiner = StableDiffusionXLInpaintPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-refiner-1.0",
text_encoder_2=base.text_encoder_2,
vae=base.vae,
torch_dtype=torch.float16,
use_safetensors=True,
variant="fp16",
).to("cuda")
img_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png"
mask_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png"
init_image = load_image(img_url)
mask_image = load_image(mask_url)
prompt = "A majestic tiger sitting on a bench"
num_inference_steps = 75
high_noise_frac = 0.7
image = base(
prompt=prompt,
image=init_image,
mask_image=mask_image,
num_inference_steps=num_inference_steps,
denoising_end=high_noise_frac,
output_type="latent",
).images
image = refiner(
prompt=prompt,
image=image,
mask_image=mask_image,
num_inference_steps=num_inference_steps,
denoising_start=high_noise_frac,
).images[0]
make_image_grid([init_image, mask_image, image.resize((512, 512))], rows=1, cols=3)
```
This ensemble of expert denoisers method works well for all available schedulers!
### Base to refiner model
SDXL gets a boost in image quality by using the refiner model to add additional high-quality details to the fully-denoised image from the base model, in an image-to-image setting.
Load the base and refiner models:
```py
from diffusers import DiffusionPipeline
import torch
base = DiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
refiner = DiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-refiner-1.0",
text_encoder_2=base.text_encoder_2,
vae=base.vae,
torch_dtype=torch.float16,
use_safetensors=True,
variant="fp16",
).to("cuda")
```
<Tip warning={true}>
You can use SDXL refiner with a different base model. For example, you can use the [Hunyuan-DiT](../../api/pipelines/hunyuandit) or [PixArt-Sigma](../../api/pipelines/pixart_sigma) pipelines to generate images with better prompt adherence. Once you have generated an image, you can pass it to the SDXL refiner model to enhance final generation quality.
</Tip>
Generate an image from the base model, and set the model output to **latent** space:
```py
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = base(prompt=prompt, output_type="latent").images[0]
```
Pass the generated image to the refiner model:
```py
image = refiner(prompt=prompt, image=image[None, :]).images[0]
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/sd_xl/init_image.png" alt="generated image of an astronaut riding a green horse on Mars" />
<figcaption class="mt-2 text-center text-sm text-gray-500">base model</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/sd_xl/refined_image.png" alt="higher quality generated image of an astronaut riding a green horse on Mars" />
<figcaption class="mt-2 text-center text-sm text-gray-500">base model + refiner model</figcaption>
</div>
</div>
For inpainting, load the base and the refiner model in the [`StableDiffusionXLInpaintPipeline`], remove the `denoising_end` and `denoising_start` parameters, and choose a smaller number of inference steps for the refiner.
## Micro-conditioning
SDXL training involves several additional conditioning techniques, which are referred to as *micro-conditioning*. These include original image size, target image size, and cropping parameters. The micro-conditionings can be used at inference time to create high-quality, centered images.
<Tip>
You can use both micro-conditioning and negative micro-conditioning parameters thanks to classifier-free guidance. They are available in the [`StableDiffusionXLPipeline`], [`StableDiffusionXLImg2ImgPipeline`], [`StableDiffusionXLInpaintPipeline`], and [`StableDiffusionXLControlNetPipeline`].
</Tip>
### Size conditioning
There are two types of size conditioning:
- [`original_size`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/stable_diffusion_xl#diffusers.StableDiffusionXLPipeline.__call__.original_size) conditioning comes from upscaled images in the training batch (because it would be wasteful to discard the smaller images which make up almost 40% of the total training data). This way, SDXL learns that upscaling artifacts are not supposed to be present in high-resolution images. During inference, you can use `original_size` to indicate the original image resolution. Using the default value of `(1024, 1024)` produces higher-quality images that resemble the 1024x1024 images in the dataset. If you choose to use a lower resolution, such as `(256, 256)`, the model still generates 1024x1024 images, but they'll look like the low resolution images (simpler patterns, blurring) in the dataset.
- [`target_size`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/stable_diffusion_xl#diffusers.StableDiffusionXLPipeline.__call__.target_size) conditioning comes from finetuning SDXL to support different image aspect ratios. During inference, if you use the default value of `(1024, 1024)`, you'll get an image that resembles the composition of square images in the dataset. We recommend using the same value for `target_size` and `original_size`, but feel free to experiment with other options!
🤗 Diffusers also lets you specify negative conditions about an image's size to steer generation away from certain image resolutions:
```py
from diffusers import StableDiffusionXLPipeline
import torch
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipe(
prompt=prompt,
negative_original_size=(512, 512),
negative_target_size=(1024, 1024),
).images[0]
```
<div class="flex flex-col justify-center">
<img src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/sd_xl/negative_conditions.png"/>
<figcaption class="text-center">Images negatively conditioned on image resolutions of (128, 128), (256, 256), and (512, 512).</figcaption>
</div>
### Crop conditioning
Images generated by previous Stable Diffusion models may sometimes appear to be cropped. This is because images are actually cropped during training so that all the images in a batch have the same size. By conditioning on crop coordinates, SDXL *learns* that no cropping - coordinates `(0, 0)` - usually correlates with centered subjects and complete faces (this is the default value in 🤗 Diffusers). You can experiment with different coordinates if you want to generate off-centered compositions!
```py
from diffusers import StableDiffusionXLPipeline
import torch
pipeline = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipeline(prompt=prompt, crops_coords_top_left=(256, 0)).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-cropped.png" alt="generated image of an astronaut in a jungle, slightly cropped"/>
</div>
You can also specify negative cropping coordinates to steer generation away from certain cropping parameters:
```py
from diffusers import StableDiffusionXLPipeline
import torch
pipe = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
image = pipe(
prompt=prompt,
negative_original_size=(512, 512),
negative_crops_coords_top_left=(0, 0),
negative_target_size=(1024, 1024),
).images[0]
image
```
## Use a different prompt for each text-encoder
SDXL uses two text-encoders, so it is possible to pass a different prompt to each text-encoder, which can [improve quality](https://github.com/huggingface/diffusers/issues/4004#issuecomment-1627764201). Pass your original prompt to `prompt` and the second prompt to `prompt_2` (use `negative_prompt` and `negative_prompt_2` if you're using negative prompts):
```py
from diffusers import StableDiffusionXLPipeline
import torch
pipeline = StableDiffusionXLPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, variant="fp16", use_safetensors=True
).to("cuda")
# prompt is passed to OAI CLIP-ViT/L-14
prompt = "Astronaut in a jungle, cold color palette, muted colors, detailed, 8k"
# prompt_2 is passed to OpenCLIP-ViT/bigG-14
prompt_2 = "Van Gogh painting"
image = pipeline(prompt=prompt, prompt_2=prompt_2).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/sdxl-double-prompt.png" alt="generated image of an astronaut in a jungle in the style of a van gogh painting"/>
</div>
The dual text-encoders also support textual inversion embeddings that need to be loaded separately as explained in the [SDXL textual inversion](textual_inversion_inference#stable-diffusion-xl) section.
## Optimizations
SDXL is a large model, and you may need to optimize memory to get it to run on your hardware. Here are some tips to save memory and speed up inference.
1. Offload the model to the CPU with [`~StableDiffusionXLPipeline.enable_model_cpu_offload`] for out-of-memory errors:
```diff
- base.to("cuda")
- refiner.to("cuda")
+ base.enable_model_cpu_offload()
+ refiner.enable_model_cpu_offload()
```
2. Use `torch.compile` for ~20% speed-up (you need `torch>=2.0`):
```diff
+ base.unet = torch.compile(base.unet, mode="reduce-overhead", fullgraph=True)
+ refiner.unet = torch.compile(refiner.unet, mode="reduce-overhead", fullgraph=True)
```
3. Enable [xFormers](../optimization/xformers) to run SDXL if `torch<2.0`:
```diff
+ base.enable_xformers_memory_efficient_attention()
+ refiner.enable_xformers_memory_efficient_attention()
```
## Other resources
If you're interested in experimenting with a minimal version of the [`UNet2DConditionModel`] used in SDXL, take a look at the [minSDXL](https://github.com/cloneofsimo/minSDXL) implementation which is written in PyTorch and directly compatible with 🤗 Diffusers.
| diffusers/docs/source/en/using-diffusers/sdxl.md/0 | {
"file_path": "diffusers/docs/source/en/using-diffusers/sdxl.md",
"repo_id": "diffusers",
"token_count": 7092
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# AutoPipeline
Diffusersは様々なタスクをこなすことができ、テキストから画像、画像から画像、画像の修復など、複数のタスクに対して同じように事前学習された重みを再利用することができます。しかし、ライブラリや拡散モデルに慣れていない場合、どのタスクにどのパイプラインを使えばいいのかがわかりにくいかもしれません。例えば、 [stable-diffusion-v1-5/stable-diffusion-v1-5](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5) チェックポイントをテキストから画像に変換するために使用している場合、それぞれ[`StableDiffusionImg2ImgPipeline`]クラスと[`StableDiffusionInpaintPipeline`]クラスでチェックポイントをロードすることで、画像から画像や画像の修復にも使えることを知らない可能性もあります。
`AutoPipeline` クラスは、🤗 Diffusers の様々なパイプラインをよりシンプルするために設計されています。この汎用的でタスク重視のパイプラインによってタスクそのものに集中することができます。`AutoPipeline` は、使用するべき正しいパイプラインクラスを自動的に検出するため、特定のパイプラインクラス名を知らなくても、タスクのチェックポイントを簡単にロードできます。
<Tip>
どのタスクがサポートされているかは、[AutoPipeline](../api/pipelines/auto_pipeline) のリファレンスをご覧ください。現在、text-to-image、image-to-image、inpaintingをサポートしています。
</Tip>
このチュートリアルでは、`AutoPipeline` を使用して、事前に学習された重みが与えられたときに、特定のタスクを読み込むためのパイプラインクラスを自動的に推測する方法を示します。
## タスクに合わせてAutoPipeline を選択する
まずはチェックポイントを選ぶことから始めましょう。例えば、 [stable-diffusion-v1-5/stable-diffusion-v1-5](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5) チェックポイントでテキストから画像への変換したいなら、[`AutoPipelineForText2Image`]を使います:
```py
from diffusers import AutoPipelineForText2Image
import torch
pipeline = AutoPipelineForText2Image.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5", torch_dtype=torch.float16, use_safetensors=True
).to("cuda")
prompt = "peasant and dragon combat, wood cutting style, viking era, bevel with rune"
image = pipeline(prompt, num_inference_steps=25).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/autopipeline-text2img.png" alt="generated image of peasant fighting dragon in wood cutting style"/>
</div>
[`AutoPipelineForText2Image`] を具体的に見ていきましょう:
1. [`model_index.json`](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5/blob/main/model_index.json) ファイルから `"stable-diffusion"` クラスを自動的に検出します。
2. `"stable-diffusion"` のクラス名に基づいて、テキストから画像へ変換する [`StableDiffusionPipeline`] を読み込みます。
同様に、画像から画像へ変換する場合、[`AutoPipelineForImage2Image`] は `model_index.json` ファイルから `"stable-diffusion"` チェックポイントを検出し、対応する [`StableDiffusionImg2ImgPipeline`] を読み込みます。また、入力画像にノイズの量やバリエーションの追加を決めるための強さなど、パイプラインクラスに固有の追加引数を渡すこともできます:
```py
from diffusers import AutoPipelineForImage2Image
import torch
import requests
from PIL import Image
from io import BytesIO
pipeline = AutoPipelineForImage2Image.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5",
torch_dtype=torch.float16,
use_safetensors=True,
).to("cuda")
prompt = "a portrait of a dog wearing a pearl earring"
url = "https://upload.wikimedia.org/wikipedia/commons/thumb/0/0f/1665_Girl_with_a_Pearl_Earring.jpg/800px-1665_Girl_with_a_Pearl_Earring.jpg"
response = requests.get(url)
image = Image.open(BytesIO(response.content)).convert("RGB")
image.thumbnail((768, 768))
image = pipeline(prompt, image, num_inference_steps=200, strength=0.75, guidance_scale=10.5).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/autopipeline-img2img.png" alt="generated image of a vermeer portrait of a dog wearing a pearl earring"/>
</div>
また、画像の修復を行いたい場合は、 [`AutoPipelineForInpainting`] が、同様にベースとなる[`StableDiffusionInpaintPipeline`]クラスを読み込みます:
```py
from diffusers import AutoPipelineForInpainting
from diffusers.utils import load_image
import torch
pipeline = AutoPipelineForInpainting.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", torch_dtype=torch.float16, use_safetensors=True
).to("cuda")
img_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png"
mask_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png"
init_image = load_image(img_url).convert("RGB")
mask_image = load_image(mask_url).convert("RGB")
prompt = "A majestic tiger sitting on a bench"
image = pipeline(prompt, image=init_image, mask_image=mask_image, num_inference_steps=50, strength=0.80).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/autopipeline-inpaint.png" alt="generated image of a tiger sitting on a bench"/>
</div>
サポートされていないチェックポイントを読み込もうとすると、エラーになります:
```py
from diffusers import AutoPipelineForImage2Image
import torch
pipeline = AutoPipelineForImage2Image.from_pretrained(
"openai/shap-e-img2img", torch_dtype=torch.float16, use_safetensors=True
)
"ValueError: AutoPipeline can't find a pipeline linked to ShapEImg2ImgPipeline for None"
```
## 複数のパイプラインを使用する
いくつかのワークフローや多くのパイプラインを読み込む場合、不要なメモリを使ってしまう再読み込みをするよりも、チェックポイントから同じコンポーネントを再利用する方がメモリ効率が良いです。たとえば、テキストから画像への変換にチェックポイントを使い、画像から画像への変換にまたチェックポイントを使いたい場合、[from_pipe()](https://huggingface.co/docs/diffusers/v0.25.1/en/api/pipelines/auto_pipeline#diffusers.AutoPipelineForImage2Image.from_pipe) メソッドを使用します。このメソッドは、以前読み込まれたパイプラインのコンポーネントを使うことで追加のメモリを消費することなく、新しいパイプラインを作成します。
[from_pipe()](https://huggingface.co/docs/diffusers/v0.25.1/en/api/pipelines/auto_pipeline#diffusers.AutoPipelineForImage2Image.from_pipe) メソッドは、元のパイプラインクラスを検出し、実行したいタスクに対応する新しいパイプラインクラスにマッピングします。例えば、テキストから画像への`"stable-diffusion"` クラスのパイプラインを読み込む場合:
```py
from diffusers import AutoPipelineForText2Image, AutoPipelineForImage2Image
import torch
pipeline_text2img = AutoPipelineForText2Image.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5", torch_dtype=torch.float16, use_safetensors=True
)
print(type(pipeline_text2img))
"<class 'diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline'>"
```
そして、[from_pipe()] (https://huggingface.co/docs/diffusers/v0.25.1/en/api/pipelines/auto_pipeline#diffusers.AutoPipelineForImage2Image.from_pipe)は、もとの`"stable-diffusion"` パイプラインのクラスである [`StableDiffusionImg2ImgPipeline`] にマップします:
```py
pipeline_img2img = AutoPipelineForImage2Image.from_pipe(pipeline_text2img)
print(type(pipeline_img2img))
"<class 'diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_img2img.StableDiffusionImg2ImgPipeline'>"
```
元のパイプラインにオプションとして引数(セーフティチェッカーの無効化など)を渡した場合、この引数も新しいパイプラインに渡されます:
```py
from diffusers import AutoPipelineForText2Image, AutoPipelineForImage2Image
import torch
pipeline_text2img = AutoPipelineForText2Image.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5",
torch_dtype=torch.float16,
use_safetensors=True,
requires_safety_checker=False,
).to("cuda")
pipeline_img2img = AutoPipelineForImage2Image.from_pipe(pipeline_text2img)
print(pipeline_img2img.config.requires_safety_checker)
"False"
```
新しいパイプラインの動作を変更したい場合は、元のパイプラインの引数や設定を上書きすることができます。例えば、セーフティチェッカーをオンに戻し、`strength` 引数を追加します:
```py
pipeline_img2img = AutoPipelineForImage2Image.from_pipe(pipeline_text2img, requires_safety_checker=True, strength=0.3)
print(pipeline_img2img.config.requires_safety_checker)
"True"
```
| diffusers/docs/source/ja/tutorials/autopipeline.md/0 | {
"file_path": "diffusers/docs/source/ja/tutorials/autopipeline.md",
"repo_id": "diffusers",
"token_count": 4154
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# 추론을 위한 OpenVINO 사용 방법
🤗 [Optimum](https://github.com/huggingface/optimum-intel)은 OpenVINO와 호환되는 Stable Diffusion 파이프라인을 제공합니다.
이제 다양한 Intel 프로세서에서 OpenVINO Runtime으로 쉽게 추론을 수행할 수 있습니다. ([여기](https://docs.openvino.ai/latest/openvino_docs_OV_UG_supported_plugins_Supported_Devices.html)서 지원되는 전 기기 목록을 확인하세요).
## 설치
다음 명령어로 🤗 Optimum을 설치합니다:
```sh
pip install optimum["openvino"]
```
## Stable Diffusion 추론
OpenVINO 모델을 불러오고 OpenVINO 런타임으로 추론을 실행하려면 `StableDiffusionPipeline`을 `OVStableDiffusionPipeline`으로 교체해야 합니다. PyTorch 모델을 불러오고 즉시 OpenVINO 형식으로 변환하려는 경우 `export=True`로 설정합니다.
```python
from optimum.intel.openvino import OVStableDiffusionPipeline
model_id = "stable-diffusion-v1-5/stable-diffusion-v1-5"
pipe = OVStableDiffusionPipeline.from_pretrained(model_id, export=True)
prompt = "a photo of an astronaut riding a horse on mars"
images = pipe(prompt).images[0]
```
[Optimum 문서](https://huggingface.co/docs/optimum/intel/inference#export-and-inference-of-stable-diffusion-models)에서 (정적 reshaping과 모델 컴파일 등의) 더 많은 예시들을 찾을 수 있습니다.
| diffusers/docs/source/ko/optimization/open_vino.md/0 | {
"file_path": "diffusers/docs/source/ko/optimization/open_vino.md",
"repo_id": "diffusers",
"token_count": 927
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Textual-Inversion
[[open-in-colab]]
[textual-inversion](https://arxiv.org/abs/2208.01618)은 소수의 예시 이미지에서 새로운 콘셉트를 포착하는 기법입니다. 이 기술은 원래 [Latent Diffusion](https://github.com/CompVis/latent-diffusion)에서 시연되었지만, 이후 [Stable Diffusion](https://huggingface.co/docs/diffusers/main/en/conceptual/stable_diffusion)과 같은 유사한 다른 모델에도 적용되었습니다. 학습된 콘셉트는 text-to-image 파이프라인에서 생성된 이미지를 더 잘 제어하는 데 사용할 수 있습니다. 이 모델은 텍스트 인코더의 임베딩 공간에서 새로운 '단어'를 학습하여 개인화된 이미지 생성을 위한 텍스트 프롬프트 내에서 사용됩니다.
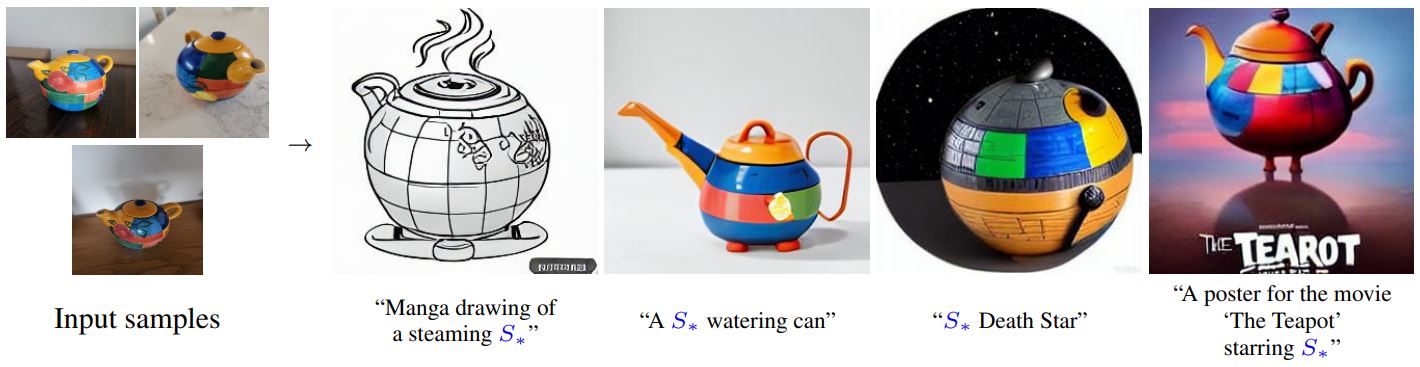
<small>By using just 3-5 images you can teach new concepts to a model such as Stable Diffusion for personalized image generation <a href="https://github.com/rinongal/textual_inversion">(image source)</a>.</small>
이 가이드에서는 textual-inversion으로 [`stable-diffusion-v1-5/stable-diffusion-v1-5`](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5) 모델을 학습하는 방법을 설명합니다. 이 가이드에서 사용된 모든 textual-inversion 학습 스크립트는 [여기](https://github.com/huggingface/diffusers/tree/main/examples/textual_inversion)에서 확인할 수 있습니다. 내부적으로 어떻게 작동하는지 자세히 살펴보고 싶으시다면 해당 링크를 참조해주시기 바랍니다.
<Tip>
[Stable Diffusion Textual Inversion Concepts Library](https://huggingface.co/sd-concepts-library)에는 커뮤니티에서 제작한 학습된 textual-inversion 모델들이 있습니다. 시간이 지남에 따라 더 많은 콘셉트들이 추가되어 유용한 리소스로 성장할 것입니다!
</Tip>
시작하기 전에 학습을 위한 의존성 라이브러리들을 설치해야 합니다:
```bash
pip install diffusers accelerate transformers
```
의존성 라이브러리들의 설치가 완료되면, [🤗Accelerate](https://github.com/huggingface/accelerate/) 환경을 초기화시킵니다.
```bash
accelerate config
```
별도의 설정없이, 기본 🤗Accelerate 환경을 설정하려면 다음과 같이 하세요:
```bash
accelerate config default
```
또는 사용 중인 환경이 노트북과 같은 대화형 셸을 지원하지 않는다면, 다음과 같이 사용할 수 있습니다:
```py
from accelerate.utils import write_basic_config
write_basic_config()
```
마지막으로, Memory-Efficient Attention을 통해 메모리 사용량을 줄이기 위해 [xFormers](https://huggingface.co/docs/diffusers/main/en/training/optimization/xformers)를 설치합니다. xFormers를 설치한 후, 학습 스크립트에 `--enable_xformers_memory_efficient_attention` 인자를 추가합니다. xFormers는 Flax에서 지원되지 않습니다.
## 허브에 모델 업로드하기
모델을 허브에 저장하려면, 학습 스크립트에 다음 인자를 추가해야 합니다.
```bash
--push_to_hub
```
## 체크포인트 저장 및 불러오기
학습중에 모델의 체크포인트를 정기적으로 저장하는 것이 좋습니다. 이렇게 하면 어떤 이유로든 학습이 중단된 경우 저장된 체크포인트에서 학습을 다시 시작할 수 있습니다. 학습 스크립트에 다음 인자를 전달하면 500단계마다 전체 학습 상태가 `output_dir`의 하위 폴더에 체크포인트로서 저장됩니다.
```bash
--checkpointing_steps=500
```
저장된 체크포인트에서 학습을 재개하려면, 학습 스크립트와 재개할 특정 체크포인트에 다음 인자를 전달하세요.
```bash
--resume_from_checkpoint="checkpoint-1500"
```
## 파인 튜닝
학습용 데이터셋으로 [고양이 장난감 데이터셋](https://huggingface.co/datasets/diffusers/cat_toy_example)을 다운로드하여 디렉토리에 저장하세요. 여러분만의 고유한 데이터셋을 사용하고자 한다면, [학습용 데이터셋 만들기](https://huggingface.co/docs/diffusers/training/create_dataset) 가이드를 살펴보시기 바랍니다.
```py
from huggingface_hub import snapshot_download
local_dir = "./cat"
snapshot_download(
"diffusers/cat_toy_example", local_dir=local_dir, repo_type="dataset", ignore_patterns=".gitattributes"
)
```
모델의 리포지토리 ID(또는 모델 가중치가 포함된 디렉터리 경로)를 `MODEL_NAME` 환경 변수에 할당하고, 해당 값을 [`pretrained_model_name_or_path`](https://huggingface.co/docs/diffusers/en/api/diffusion_pipeline#diffusers.DiffusionPipeline.from_pretrained.pretrained_model_name_or_path) 인자에 전달합니다. 그리고 이미지가 포함된 디렉터리 경로를 `DATA_DIR` 환경 변수에 할당합니다.
이제 [학습 스크립트](https://github.com/huggingface/diffusers/blob/main/examples/textual_inversion/textual_inversion.py)를 실행할 수 있습니다. 스크립트는 다음 파일을 생성하고 리포지토리에 저장합니다.
- `learned_embeds.bin`
- `token_identifier.txt`
- `type_of_concept.txt`.
<Tip>
💡V100 GPU 1개를 기준으로 전체 학습에는 최대 1시간이 걸립니다. 학습이 완료되기를 기다리는 동안 궁금한 점이 있으면 아래 섹션에서 [textual-inversion이 어떻게 작동하는지](https://huggingface.co/docs/diffusers/training/text_inversion#how-it-works) 자유롭게 확인하세요 !
</Tip>
<frameworkcontent>
<pt>
```bash
export MODEL_NAME="stable-diffusion-v1-5/stable-diffusion-v1-5"
export DATA_DIR="./cat"
accelerate launch textual_inversion.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--train_data_dir=$DATA_DIR \
--learnable_property="object" \
--placeholder_token="<cat-toy>" --initializer_token="toy" \
--resolution=512 \
--train_batch_size=1 \
--gradient_accumulation_steps=4 \
--max_train_steps=3000 \
--learning_rate=5.0e-04 --scale_lr \
--lr_scheduler="constant" \
--lr_warmup_steps=0 \
--output_dir="textual_inversion_cat" \
--push_to_hub
```
<Tip>
💡학습 성능을 올리기 위해, 플레이스홀더 토큰(`<cat-toy>`)을 (단일한 임베딩 벡터가 아닌) 복수의 임베딩 벡터로 표현하는 것 역시 고려할 있습니다. 이러한 트릭이 모델이 보다 복잡한 이미지의 스타일(앞서 말한 콘셉트)을 더 잘 캡처하는 데 도움이 될 수 있습니다. 복수의 임베딩 벡터 학습을 활성화하려면 다음 옵션을 전달하십시오.
```bash
--num_vectors=5
```
</Tip>
</pt>
<jax>
TPU에 액세스할 수 있는 경우, [Flax 학습 스크립트](https://github.com/huggingface/diffusers/blob/main/examples/textual_inversion/textual_inversion_flax.py)를 사용하여 더 빠르게 모델을 학습시켜보세요. (물론 GPU에서도 작동합니다.) 동일한 설정에서 Flax 학습 스크립트는 PyTorch 학습 스크립트보다 최소 70% 더 빨라야 합니다! ⚡️
시작하기 앞서 Flax에 대한 의존성 라이브러리들을 설치해야 합니다.
```bash
pip install -U -r requirements_flax.txt
```
모델의 리포지토리 ID(또는 모델 가중치가 포함된 디렉터리 경로)를 `MODEL_NAME` 환경 변수에 할당하고, 해당 값을 [`pretrained_model_name_or_path`](https://huggingface.co/docs/diffusers/en/api/diffusion_pipeline#diffusers.DiffusionPipeline.from_pretrained.pretrained_model_name_or_path) 인자에 전달합니다.
그런 다음 [학습 스크립트](https://github.com/huggingface/diffusers/blob/main/examples/textual_inversion/textual_inversion_flax.py)를 시작할 수 있습니다.
```bash
export MODEL_NAME="duongna/stable-diffusion-v1-4-flax"
export DATA_DIR="./cat"
python textual_inversion_flax.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--train_data_dir=$DATA_DIR \
--learnable_property="object" \
--placeholder_token="<cat-toy>" --initializer_token="toy" \
--resolution=512 \
--train_batch_size=1 \
--max_train_steps=3000 \
--learning_rate=5.0e-04 --scale_lr \
--output_dir="textual_inversion_cat" \
--push_to_hub
```
</jax>
</frameworkcontent>
### 중간 로깅
모델의 학습 진행 상황을 추적하는 데 관심이 있는 경우, 학습 과정에서 생성된 이미지를 저장할 수 있습니다. 학습 스크립트에 다음 인수를 추가하여 중간 로깅을 활성화합니다.
- `validation_prompt` : 샘플을 생성하는 데 사용되는 프롬프트(기본값은 `None`으로 설정되며, 이 때 중간 로깅은 비활성화됨)
- `num_validation_images` : 생성할 샘플 이미지 수
- `validation_steps` : `validation_prompt`로부터 샘플 이미지를 생성하기 전 스텝의 수
```bash
--validation_prompt="A <cat-toy> backpack"
--num_validation_images=4
--validation_steps=100
```
## 추론
모델을 학습한 후에는, 해당 모델을 [`StableDiffusionPipeline`]을 사용하여 추론에 사용할 수 있습니다.
textual-inversion 스크립트는 기본적으로 textual-inversion을 통해 얻어진 임베딩 벡터만을 저장합니다. 해당 임베딩 벡터들은 텍스트 인코더의 임베딩 행렬에 추가되어 있습습니다.
<frameworkcontent>
<pt>
<Tip>
💡 커뮤니티는 [sd-concepts-library](https://huggingface.co/sd-concepts-library) 라는 대규모의 textual-inversion 임베딩 벡터 라이브러리를 만들었습니다. textual-inversion 임베딩을 밑바닥부터 학습하는 대신, 해당 라이브러리에 본인이 찾는 textual-inversion 임베딩이 이미 추가되어 있지 않은지를 확인하는 것도 좋은 방법이 될 것 같습니다.
</Tip>
textual-inversion 임베딩 벡터을 불러오기 위해서는, 먼저 해당 임베딩 벡터를 학습할 때 사용한 모델을 불러와야 합니다. 여기서는 [`stable-diffusion-v1-5/stable-diffusion-v1-5`](https://huggingface.co/docs/diffusers/training/stable-diffusion-v1-5/stable-diffusion-v1-5) 모델이 사용되었다고 가정하고 불러오겠습니다.
```python
from diffusers import StableDiffusionPipeline
import torch
model_id = "stable-diffusion-v1-5/stable-diffusion-v1-5"
pipe = StableDiffusionPipeline.from_pretrained(model_id, torch_dtype=torch.float16).to("cuda")
```
다음으로 `TextualInversionLoaderMixin.load_textual_inversion` 함수를 통해, textual-inversion 임베딩 벡터를 불러와야 합니다. 여기서 우리는 이전의 `<cat-toy>` 예제의 임베딩을 불러올 것입니다.
```python
pipe.load_textual_inversion("sd-concepts-library/cat-toy")
```
이제 플레이스홀더 토큰(`<cat-toy>`)이 잘 동작하는지를 확인하는 파이프라인을 실행할 수 있습니다.
```python
prompt = "A <cat-toy> backpack"
image = pipe(prompt, num_inference_steps=50).images[0]
image.save("cat-backpack.png")
```
`TextualInversionLoaderMixin.load_textual_inversion`은 Diffusers 형식으로 저장된 텍스트 임베딩 벡터를 로드할 수 있을 뿐만 아니라, [Automatic1111](https://github.com/AUTOMATIC1111/stable-diffusion-webui) 형식으로 저장된 임베딩 벡터도 로드할 수 있습니다. 이렇게 하려면, 먼저 [civitAI](https://civitai.com/models/3036?modelVersionId=8387)에서 임베딩 벡터를 다운로드한 다음 로컬에서 불러와야 합니다.
```python
pipe.load_textual_inversion("./charturnerv2.pt")
```
</pt>
<jax>
현재 Flax에 대한 `load_textual_inversion` 함수는 없습니다. 따라서 학습 후 textual-inversion 임베딩 벡터가 모델의 일부로서 저장되었는지를 확인해야 합니다. 그런 다음은 다른 Flax 모델과 마찬가지로 실행할 수 있습니다.
```python
import jax
import numpy as np
from flax.jax_utils import replicate
from flax.training.common_utils import shard
from diffusers import FlaxStableDiffusionPipeline
model_path = "path-to-your-trained-model"
pipeline, params = FlaxStableDiffusionPipeline.from_pretrained(model_path, dtype=jax.numpy.bfloat16)
prompt = "A <cat-toy> backpack"
prng_seed = jax.random.PRNGKey(0)
num_inference_steps = 50
num_samples = jax.device_count()
prompt = num_samples * [prompt]
prompt_ids = pipeline.prepare_inputs(prompt)
# shard inputs and rng
params = replicate(params)
prng_seed = jax.random.split(prng_seed, jax.device_count())
prompt_ids = shard(prompt_ids)
images = pipeline(prompt_ids, params, prng_seed, num_inference_steps, jit=True).images
images = pipeline.numpy_to_pil(np.asarray(images.reshape((num_samples,) + images.shape[-3:])))
image.save("cat-backpack.png")
```
</jax>
</frameworkcontent>
## 작동 방식
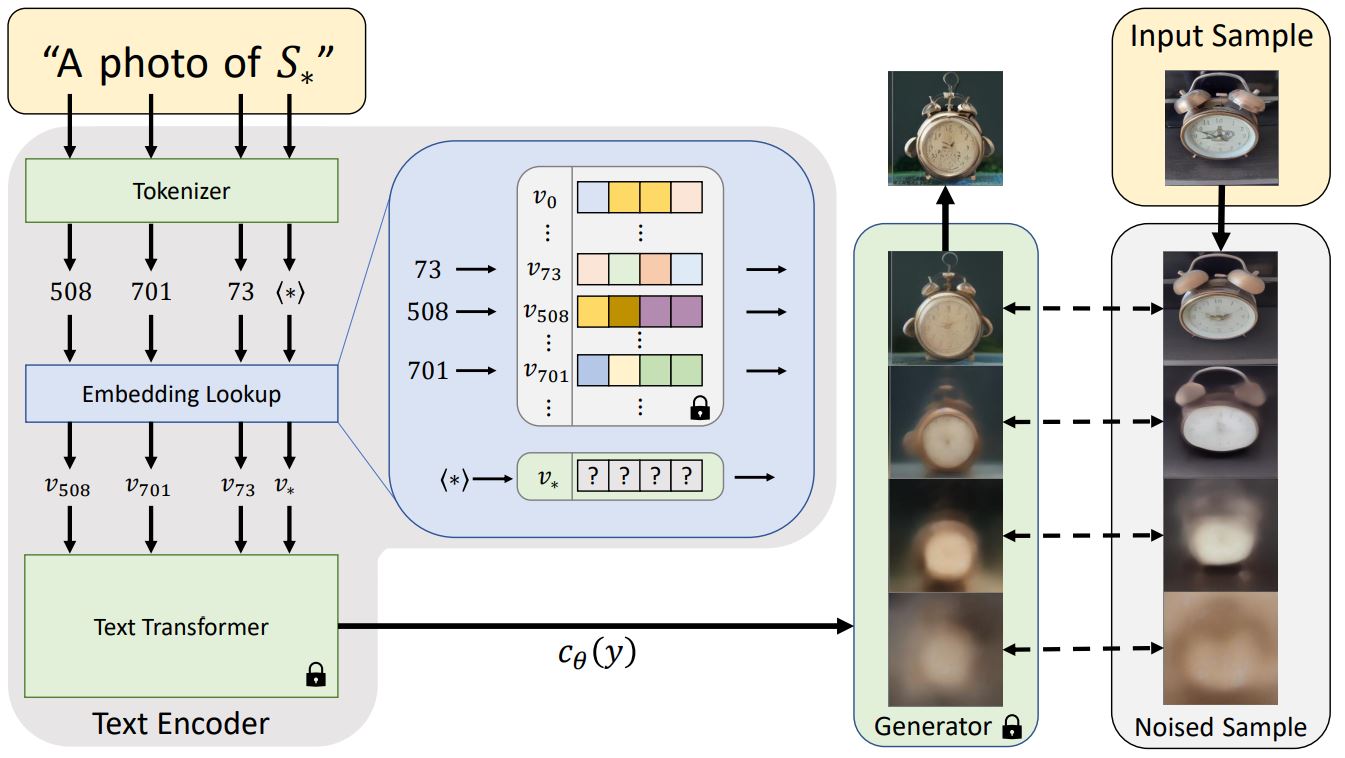
<small>Architecture overview from the Textual Inversion <a href="https://textual-inversion.github.io/">blog post.</a></small>
일반적으로 텍스트 프롬프트는 모델에 전달되기 전에 임베딩으로 토큰화됩니다. textual-inversion은 비슷한 작업을 수행하지만, 위 다이어그램의 특수 토큰 `S*`로부터 새로운 토큰 임베딩 `v*`를 학습합니다. 모델의 아웃풋은 디퓨전 모델을 조정하는 데 사용되며, 디퓨전 모델이 단 몇 개의 예제 이미지에서 신속하고 새로운 콘셉트를 이해하는 데 도움을 줍니다.
이를 위해 textual-inversion은 제너레이터 모델과 학습용 이미지의 노이즈 버전을 사용합니다. 제너레이터는 노이즈가 적은 버전의 이미지를 예측하려고 시도하며 토큰 임베딩 `v*`은 제너레이터의 성능에 따라 최적화됩니다. 토큰 임베딩이 새로운 콘셉트를 성공적으로 포착하면 디퓨전 모델에 더 유용한 정보를 제공하고 노이즈가 적은 더 선명한 이미지를 생성하는 데 도움이 됩니다. 이러한 최적화 프로세스는 일반적으로 다양한 프롬프트와 이미지에 수천 번에 노출됨으로써 이루어집니다.
| diffusers/docs/source/ko/training/text_inversion.md/0 | {
"file_path": "diffusers/docs/source/ko/training/text_inversion.md",
"repo_id": "diffusers",
"token_count": 9110
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# 스케줄러
diffusion 파이프라인은 diffusion 모델, 스케줄러 등의 컴포넌트들로 구성됩니다. 그리고 파이프라인 안의 일부 컴포넌트를 다른 컴포넌트로 교체하는 식의 커스터마이징 역시 가능합니다. 이와 같은 컴포넌트 커스터마이징의 가장 대표적인 예시가 바로 [스케줄러](../api/schedulers/overview.md)를 교체하는 것입니다.
스케쥴러는 다음과 같이 diffusion 시스템의 전반적인 디노이징 프로세스를 정의합니다.
- 디노이징 스텝을 얼마나 가져가야 할까?
- 확률적으로(stochastic) 혹은 확정적으로(deterministic)?
- 디노이징 된 샘플을 찾아내기 위해 어떤 알고리즘을 사용해야 할까?
이러한 프로세스는 다소 난해하고, 디노이징 속도와 디노이징 퀄리티 사이의 트레이드 오프를 정의해야 하는 문제가 될 수 있습니다. 주어진 파이프라인에 어떤 스케줄러가 가장 적합한지를 정량적으로 판단하는 것은 매우 어려운 일입니다. 이로 인해 일단 해당 스케줄러를 직접 사용하여, 생성되는 이미지를 직접 눈으로 보며, 정성적으로 성능을 판단해보는 것이 추천되곤 합니다.
## 파이프라인 불러오기
먼저 스테이블 diffusion 파이프라인을 불러오도록 해보겠습니다. 물론 스테이블 diffusion을 사용하기 위해서는, 허깅페이스 허브에 등록된 사용자여야 하며, 관련 [라이센스](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5)에 동의해야 한다는 점을 잊지 말아주세요.
*역자 주: 다만, 현재 신규로 생성한 허깅페이스 계정에 대해서는 라이센스 동의를 요구하지 않는 것으로 보입니다!*
```python
from huggingface_hub import login
from diffusers import DiffusionPipeline
import torch
# first we need to login with our access token
login()
# Now we can download the pipeline
pipeline = DiffusionPipeline.from_pretrained("stable-diffusion-v1-5/stable-diffusion-v1-5", torch_dtype=torch.float16)
```
다음으로, GPU로 이동합니다.
```python
pipeline.to("cuda")
```
## 스케줄러 액세스
스케줄러는 언제나 파이프라인의 컴포넌트로서 존재하며, 일반적으로 파이프라인 인스턴스 내에 `scheduler`라는 이름의 속성(property)으로 정의되어 있습니다.
```python
pipeline.scheduler
```
**Output**:
```
PNDMScheduler {
"_class_name": "PNDMScheduler",
"_diffusers_version": "0.8.0.dev0",
"beta_end": 0.012,
"beta_schedule": "scaled_linear",
"beta_start": 0.00085,
"clip_sample": false,
"num_train_timesteps": 1000,
"set_alpha_to_one": false,
"skip_prk_steps": true,
"steps_offset": 1,
"trained_betas": null
}
```
출력 결과를 통해, 우리는 해당 스케줄러가 [`PNDMScheduler`]의 인스턴스라는 것을 알 수 있습니다. 이제 [`PNDMScheduler`]와 다른 스케줄러들의 성능을 비교해보도록 하겠습니다. 먼저 테스트에 사용할 프롬프트를 다음과 같이 정의해보도록 하겠습니다.
```python
prompt = "A photograph of an astronaut riding a horse on Mars, high resolution, high definition."
```
다음으로 유사한 이미지 생성을 보장하기 위해서, 다음과 같이 랜덤시드를 고정해주도록 하겠습니다.
```python
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_pndm.png" width="400"/>
<br>
</p>
## 스케줄러 교체하기
다음으로 파이프라인의 스케줄러를 다른 스케줄러로 교체하는 방법에 대해 알아보겠습니다. 모든 스케줄러는 [`SchedulerMixin.compatibles`]라는 속성(property)을 갖고 있습니다. 해당 속성은 **호환 가능한** 스케줄러들에 대한 정보를 담고 있습니다.
```python
pipeline.scheduler.compatibles
```
**Output**:
```
[diffusers.schedulers.scheduling_lms_discrete.LMSDiscreteScheduler,
diffusers.schedulers.scheduling_ddim.DDIMScheduler,
diffusers.schedulers.scheduling_dpmsolver_multistep.DPMSolverMultistepScheduler,
diffusers.schedulers.scheduling_euler_discrete.EulerDiscreteScheduler,
diffusers.schedulers.scheduling_pndm.PNDMScheduler,
diffusers.schedulers.scheduling_ddpm.DDPMScheduler,
diffusers.schedulers.scheduling_euler_ancestral_discrete.EulerAncestralDiscreteScheduler]
```
호환되는 스케줄러들을 살펴보면 아래와 같습니다.
- [`LMSDiscreteScheduler`],
- [`DDIMScheduler`],
- [`DPMSolverMultistepScheduler`],
- [`EulerDiscreteScheduler`],
- [`PNDMScheduler`],
- [`DDPMScheduler`],
- [`EulerAncestralDiscreteScheduler`].
앞서 정의했던 프롬프트를 사용해서 각각의 스케줄러들을 비교해보도록 하겠습니다.
먼저 파이프라인 안의 스케줄러를 바꾸기 위해 [`ConfigMixin.config`] 속성과 [`ConfigMixin.from_config`] 메서드를 활용해보려고 합니다.
```python
pipeline.scheduler.config
```
**Output**:
```
FrozenDict([('num_train_timesteps', 1000),
('beta_start', 0.00085),
('beta_end', 0.012),
('beta_schedule', 'scaled_linear'),
('trained_betas', None),
('skip_prk_steps', True),
('set_alpha_to_one', False),
('steps_offset', 1),
('_class_name', 'PNDMScheduler'),
('_diffusers_version', '0.8.0.dev0'),
('clip_sample', False)])
```
기존 스케줄러의 config를 호환 가능한 다른 스케줄러에 이식하는 것 역시 가능합니다.
다음 예시는 기존 스케줄러(`pipeline.scheduler`)를 다른 종류의 스케줄러(`DDIMScheduler`)로 바꾸는 코드입니다. 기존 스케줄러가 갖고 있던 config를 `.from_config` 메서드의 인자로 전달하는 것을 확인할 수 있습니다.
```python
from diffusers import DDIMScheduler
pipeline.scheduler = DDIMScheduler.from_config(pipeline.scheduler.config)
```
이제 파이프라인을 실행해서 두 스케줄러 사이의 생성된 이미지의 퀄리티를 비교해봅시다.
```python
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_ddim.png" width="400"/>
<br>
</p>
## 스케줄러들 비교해보기
지금까지는 [`PNDMScheduler`]와 [`DDIMScheduler`] 스케줄러를 실행해보았습니다. 아직 비교해볼 스케줄러들이 더 많이 남아있으니 계속 비교해보도록 하겠습니다.
[`LMSDiscreteScheduler`]을 일반적으로 더 좋은 결과를 보여줍니다.
```python
from diffusers import LMSDiscreteScheduler
pipeline.scheduler = LMSDiscreteScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_lms.png" width="400"/>
<br>
</p>
[`EulerDiscreteScheduler`]와 [`EulerAncestralDiscreteScheduler`] 고작 30번의 inference step만으로도 높은 퀄리티의 이미지를 생성하는 것을 알 수 있습니다.
```python
from diffusers import EulerDiscreteScheduler
pipeline.scheduler = EulerDiscreteScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator, num_inference_steps=30).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_euler_discrete.png" width="400"/>
<br>
</p>
```python
from diffusers import EulerAncestralDiscreteScheduler
pipeline.scheduler = EulerAncestralDiscreteScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator, num_inference_steps=30).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_euler_ancestral.png" width="400"/>
<br>
</p>
지금 이 문서를 작성하는 현시점 기준에선, [`DPMSolverMultistepScheduler`]가 시간 대비 가장 좋은 품질의 이미지를 생성하는 것 같습니다. 20번 정도의 스텝만으로도 실행될 수 있습니다.
```python
from diffusers import DPMSolverMultistepScheduler
pipeline.scheduler = DPMSolverMultistepScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator, num_inference_steps=20).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_dpm.png" width="400"/>
<br>
</p>
보시다시피 생성된 이미지들은 매우 비슷하고, 비슷한 퀄리티를 보이는 것 같습니다. 실제로 어떤 스케줄러를 선택할 것인가는 종종 특정 이용 사례에 기반해서 결정되곤 합니다. 결국 여러 종류의 스케줄러를 직접 실행시켜보고 눈으로 직접 비교해서 판단하는 게 좋은 선택일 것 같습니다.
## Flax에서 스케줄러 교체하기
JAX/Flax 사용자인 경우 기본 파이프라인 스케줄러를 변경할 수도 있습니다. 다음은 Flax Stable Diffusion 파이프라인과 초고속 [DDPM-Solver++ 스케줄러를](../api/schedulers/multistep_dpm_solver) 사용하여 추론을 실행하는 방법에 대한 예시입니다 .
```Python
import jax
import numpy as np
from flax.jax_utils import replicate
from flax.training.common_utils import shard
from diffusers import FlaxStableDiffusionPipeline, FlaxDPMSolverMultistepScheduler
model_id = "stable-diffusion-v1-5/stable-diffusion-v1-5"
scheduler, scheduler_state = FlaxDPMSolverMultistepScheduler.from_pretrained(
model_id,
subfolder="scheduler"
)
pipeline, params = FlaxStableDiffusionPipeline.from_pretrained(
model_id,
scheduler=scheduler,
variant="bf16",
dtype=jax.numpy.bfloat16,
)
params["scheduler"] = scheduler_state
# Generate 1 image per parallel device (8 on TPUv2-8 or TPUv3-8)
prompt = "a photo of an astronaut riding a horse on mars"
num_samples = jax.device_count()
prompt_ids = pipeline.prepare_inputs([prompt] * num_samples)
prng_seed = jax.random.PRNGKey(0)
num_inference_steps = 25
# shard inputs and rng
params = replicate(params)
prng_seed = jax.random.split(prng_seed, jax.device_count())
prompt_ids = shard(prompt_ids)
images = pipeline(prompt_ids, params, prng_seed, num_inference_steps, jit=True).images
images = pipeline.numpy_to_pil(np.asarray(images.reshape((num_samples,) + images.shape[-3:])))
```
<Tip warning={true}>
다음 Flax 스케줄러는 *아직* Flax Stable Diffusion 파이프라인과 호환되지 않습니다.
- `FlaxLMSDiscreteScheduler`
- `FlaxDDPMScheduler`
</Tip>
| diffusers/docs/source/ko/using-diffusers/schedulers.md/0 | {
"file_path": "diffusers/docs/source/ko/using-diffusers/schedulers.md",
"repo_id": "diffusers",
"token_count": 6923
} |
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# 安装
在你正在使用的任意深度学习框架中安装 🤗 Diffusers 。
🤗 Diffusers已在Python 3.8+、PyTorch 1.7.0+和Flax上进行了测试。按照下面的安装说明,针对你正在使用的深度学习框架进行安装:
- [PyTorch](https://pytorch.org/get-started/locally/) installation instructions.
- [Flax](https://flax.readthedocs.io/en/latest/) installation instructions.
## 使用pip安装
你需要在[虚拟环境](https://docs.python.org/3/library/venv.html)中安装 🤗 Diffusers 。
如果你对 Python 虚拟环境不熟悉,可以看看这个[教程](https://packaging.python.org/guides/installing-using-pip-and-virtual-environments/).
在虚拟环境中,你可以轻松管理不同的项目,避免依赖项之间的兼容性问题。
首先,在你的项目目录下创建一个虚拟环境:
```bash
python -m venv .env
```
激活虚拟环境:
```bash
source .env/bin/activate
```
现在,你就可以安装 🤗 Diffusers了!使用下边这个命令:
**PyTorch**
```bash
pip install diffusers["torch"]
```
**Flax**
```bash
pip install diffusers["flax"]
```
## 从源代码安装
在从源代码安装 `diffusers` 之前,确保你已经安装了 `torch` 和 `accelerate`。
`torch`的安装教程可以看 `torch` [文档](https://pytorch.org/get-started/locally/#start-locally).
安装 `accelerate`
```bash
pip install accelerate
```
从源码安装 🤗 Diffusers 需要使用以下命令:
```bash
pip install git+https://github.com/huggingface/diffusers
```
这个命令安装的是最新的 `main`版本,而不是最近的`stable`版。
`main`是一直和最新进展保持一致的。比如,上次发布的正式版中有bug,在`main`中可以看到这个bug被修复了,但是新的正式版此时尚未推出。
但是这也意味着 `main`版本不保证是稳定的。
我们努力保持`main`版本正常运行,大多数问题都能在几个小时或一天之内解决
如果你遇到了问题,可以提 [Issue](https://github.com/huggingface/transformers/issues),这样我们就能更快修复问题了。
## 可修改安装
如果你想做以下两件事,那你可能需要一个可修改代码的安装方式:
* 使用 `main`版本的源代码。
* 为 🤗 Diffusers 贡献,需要测试代码中的变化。
使用以下命令克隆并安装 🤗 Diffusers:
```bash
git clone https://github.com/huggingface/diffusers.git
cd diffusers
```
**PyTorch**
```sh
pip install -e ".[torch]"
```
**Flax**
```sh
pip install -e ".[flax]"
```
这些命令将连接到你克隆的版本库和你的 Python 库路径。
现在,不只是在通常的库路径,Python 还会在你克隆的文件夹内寻找包。
例如,如果你的 Python 包通常安装在 `~/anaconda3/envs/main/lib/python3.10/Site-packages/`,Python 也会搜索你克隆到的文件夹。`~/diffusers/`。
<Tip warning={true}>
如果你想继续使用这个库,你必须保留 `diffusers` 文件夹。
</Tip>
现在你可以用下面的命令轻松地将你克隆的 🤗 Diffusers 库更新到最新版本。
```bash
cd ~/diffusers/
git pull
```
你的Python环境将在下次运行时找到`main`版本的 🤗 Diffusers。
## 注意 Telemetry 日志
我们的库会在使用`from_pretrained()`请求期间收集 telemetry 信息。这些数据包括Diffusers和PyTorch/Flax的版本,请求的模型或管道类,以及预训练检查点的路径(如果它被托管在Hub上的话)。
这些使用数据有助于我们调试问题并确定新功能的开发优先级。
Telemetry 数据仅在从 HuggingFace Hub 中加载模型和管道时发送,而不会在本地使用期间收集。
我们知道,并不是每个人都想分享这些的信息,我们尊重您的隐私,
因此您可以通过在终端中设置 `DISABLE_TELEMETRY` 环境变量从而禁用 Telemetry 数据收集:
Linux/MacOS :
```bash
export DISABLE_TELEMETRY=YES
```
Windows :
```bash
set DISABLE_TELEMETRY=YES
``` | diffusers/docs/source/zh/installation.md/0 | {
"file_path": "diffusers/docs/source/zh/installation.md",
"repo_id": "diffusers",
"token_count": 2457
} |
# Copyright 2024 The HuggingFace Team.
# All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import logging
import math
import os
import random
import shutil
from datetime import timedelta
from pathlib import Path
from typing import List, Optional, Tuple, Union
import torch
import transformers
from accelerate import Accelerator, DistributedType
from accelerate.logging import get_logger
from accelerate.utils import DistributedDataParallelKwargs, InitProcessGroupKwargs, ProjectConfiguration, set_seed
from huggingface_hub import create_repo, upload_folder
from peft import LoraConfig, get_peft_model_state_dict, set_peft_model_state_dict
from torch.utils.data import DataLoader, Dataset
from torchvision import transforms
from tqdm.auto import tqdm
from transformers import AutoTokenizer, T5EncoderModel, T5Tokenizer
import diffusers
from diffusers import (
AutoencoderKLCogVideoX,
CogVideoXDPMScheduler,
CogVideoXImageToVideoPipeline,
CogVideoXTransformer3DModel,
)
from diffusers.models.embeddings import get_3d_rotary_pos_embed
from diffusers.optimization import get_scheduler
from diffusers.pipelines.cogvideo.pipeline_cogvideox import get_resize_crop_region_for_grid
from diffusers.training_utils import cast_training_params, free_memory
from diffusers.utils import (
check_min_version,
convert_unet_state_dict_to_peft,
export_to_video,
is_wandb_available,
load_image,
)
from diffusers.utils.hub_utils import load_or_create_model_card, populate_model_card
from diffusers.utils.torch_utils import is_compiled_module
if is_wandb_available():
import wandb
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
check_min_version("0.33.0.dev0")
logger = get_logger(__name__)
def get_args():
parser = argparse.ArgumentParser(description="Simple example of a training script for CogVideoX.")
# Model information
parser.add_argument(
"--pretrained_model_name_or_path",
type=str,
default=None,
required=True,
help="Path to pretrained model or model identifier from huggingface.co/models.",
)
parser.add_argument(
"--revision",
type=str,
default=None,
required=False,
help="Revision of pretrained model identifier from huggingface.co/models.",
)
parser.add_argument(
"--variant",
type=str,
default=None,
help="Variant of the model files of the pretrained model identifier from huggingface.co/models, 'e.g.' fp16",
)
parser.add_argument(
"--cache_dir",
type=str,
default=None,
help="The directory where the downloaded models and datasets will be stored.",
)
# Dataset information
parser.add_argument(
"--dataset_name",
type=str,
default=None,
help=(
"The name of the Dataset (from the HuggingFace hub) containing the training data of instance images (could be your own, possibly private,"
" dataset). It can also be a path pointing to a local copy of a dataset in your filesystem,"
" or to a folder containing files that 🤗 Datasets can understand."
),
)
parser.add_argument(
"--dataset_config_name",
type=str,
default=None,
help="The config of the Dataset, leave as None if there's only one config.",
)
parser.add_argument(
"--instance_data_root",
type=str,
default=None,
help=("A folder containing the training data."),
)
parser.add_argument(
"--video_column",
type=str,
default="video",
help="The column of the dataset containing videos. Or, the name of the file in `--instance_data_root` folder containing the line-separated path to video data.",
)
parser.add_argument(
"--caption_column",
type=str,
default="text",
help="The column of the dataset containing the instance prompt for each video. Or, the name of the file in `--instance_data_root` folder containing the line-separated instance prompts.",
)
parser.add_argument(
"--id_token", type=str, default=None, help="Identifier token appended to the start of each prompt if provided."
)
parser.add_argument(
"--dataloader_num_workers",
type=int,
default=0,
help=(
"Number of subprocesses to use for data loading. 0 means that the data will be loaded in the main process."
),
)
# Validation
parser.add_argument(
"--validation_prompt",
type=str,
default=None,
help="One or more prompt(s) that is used during validation to verify that the model is learning. Multiple validation prompts should be separated by the '--validation_prompt_seperator' string.",
)
parser.add_argument(
"--validation_images",
type=str,
default=None,
help="One or more image path(s) that is used during validation to verify that the model is learning. Multiple validation paths should be separated by the '--validation_prompt_seperator' string. These should correspond to the order of the validation prompts.",
)
parser.add_argument(
"--validation_prompt_separator",
type=str,
default=":::",
help="String that separates multiple validation prompts",
)
parser.add_argument(
"--num_validation_videos",
type=int,
default=1,
help="Number of videos that should be generated during validation per `validation_prompt`.",
)
parser.add_argument(
"--validation_epochs",
type=int,
default=50,
help=(
"Run validation every X epochs. Validation consists of running the prompt `args.validation_prompt` multiple times: `args.num_validation_videos`."
),
)
parser.add_argument(
"--guidance_scale",
type=float,
default=6,
help="The guidance scale to use while sampling validation videos.",
)
parser.add_argument(
"--use_dynamic_cfg",
action="store_true",
default=False,
help="Whether or not to use the default cosine dynamic guidance schedule when sampling validation videos.",
)
# Training information
parser.add_argument("--seed", type=int, default=None, help="A seed for reproducible training.")
parser.add_argument(
"--rank",
type=int,
default=128,
help=("The dimension of the LoRA update matrices."),
)
parser.add_argument(
"--lora_alpha",
type=float,
default=128,
help=("The scaling factor to scale LoRA weight update. The actual scaling factor is `lora_alpha / rank`"),
)
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16"],
help=(
"Whether to use mixed precision. Choose between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >="
" 1.10.and an Nvidia Ampere GPU. Default to the value of accelerate config of the current system or the"
" flag passed with the `accelerate.launch` command. Use this argument to override the accelerate config."
),
)
parser.add_argument(
"--output_dir",
type=str,
default="cogvideox-i2v-lora",
help="The output directory where the model predictions and checkpoints will be written.",
)
parser.add_argument(
"--height",
type=int,
default=480,
help="All input videos are resized to this height.",
)
parser.add_argument(
"--width",
type=int,
default=720,
help="All input videos are resized to this width.",
)
parser.add_argument("--fps", type=int, default=8, help="All input videos will be used at this FPS.")
parser.add_argument(
"--max_num_frames", type=int, default=49, help="All input videos will be truncated to these many frames."
)
parser.add_argument(
"--skip_frames_start",
type=int,
default=0,
help="Number of frames to skip from the beginning of each input video. Useful if training data contains intro sequences.",
)
parser.add_argument(
"--skip_frames_end",
type=int,
default=0,
help="Number of frames to skip from the end of each input video. Useful if training data contains outro sequences.",
)
parser.add_argument(
"--random_flip",
action="store_true",
help="whether to randomly flip videos horizontally",
)
parser.add_argument(
"--train_batch_size", type=int, default=4, help="Batch size (per device) for the training dataloader."
)
parser.add_argument("--num_train_epochs", type=int, default=1)
parser.add_argument(
"--max_train_steps",
type=int,
default=None,
help="Total number of training steps to perform. If provided, overrides `--num_train_epochs`.",
)
parser.add_argument(
"--checkpointing_steps",
type=int,
default=500,
help=(
"Save a checkpoint of the training state every X updates. These checkpoints can be used both as final"
" checkpoints in case they are better than the last checkpoint, and are also suitable for resuming"
" training using `--resume_from_checkpoint`."
),
)
parser.add_argument(
"--checkpoints_total_limit",
type=int,
default=None,
help=("Max number of checkpoints to store."),
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help=(
"Whether training should be resumed from a previous checkpoint. Use a path saved by"
' `--checkpointing_steps`, or `"latest"` to automatically select the last available checkpoint.'
),
)
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="Number of updates steps to accumulate before performing a backward/update pass.",
)
parser.add_argument(
"--gradient_checkpointing",
action="store_true",
help="Whether or not to use gradient checkpointing to save memory at the expense of slower backward pass.",
)
parser.add_argument(
"--learning_rate",
type=float,
default=1e-4,
help="Initial learning rate (after the potential warmup period) to use.",
)
parser.add_argument(
"--scale_lr",
action="store_true",
default=False,
help="Scale the learning rate by the number of GPUs, gradient accumulation steps, and batch size.",
)
parser.add_argument(
"--lr_scheduler",
type=str,
default="constant",
help=(
'The scheduler type to use. Choose between ["linear", "cosine", "cosine_with_restarts", "polynomial",'
' "constant", "constant_with_warmup"]'
),
)
parser.add_argument(
"--lr_warmup_steps", type=int, default=500, help="Number of steps for the warmup in the lr scheduler."
)
parser.add_argument(
"--lr_num_cycles",
type=int,
default=1,
help="Number of hard resets of the lr in cosine_with_restarts scheduler.",
)
parser.add_argument("--lr_power", type=float, default=1.0, help="Power factor of the polynomial scheduler.")
parser.add_argument(
"--enable_slicing",
action="store_true",
default=False,
help="Whether or not to use VAE slicing for saving memory.",
)
parser.add_argument(
"--enable_tiling",
action="store_true",
default=False,
help="Whether or not to use VAE tiling for saving memory.",
)
parser.add_argument(
"--noised_image_dropout",
type=float,
default=0.05,
help="Image condition dropout probability.",
)
# Optimizer
parser.add_argument(
"--optimizer",
type=lambda s: s.lower(),
default="adam",
choices=["adam", "adamw", "prodigy"],
help=("The optimizer type to use."),
)
parser.add_argument(
"--use_8bit_adam",
action="store_true",
help="Whether or not to use 8-bit Adam from bitsandbytes. Ignored if optimizer is not set to AdamW",
)
parser.add_argument(
"--adam_beta1", type=float, default=0.9, help="The beta1 parameter for the Adam and Prodigy optimizers."
)
parser.add_argument(
"--adam_beta2", type=float, default=0.95, help="The beta2 parameter for the Adam and Prodigy optimizers."
)
parser.add_argument(
"--prodigy_beta3",
type=float,
default=None,
help="Coefficients for computing the Prodigy optimizer's stepsize using running averages. If set to None, uses the value of square root of beta2.",
)
parser.add_argument("--prodigy_decouple", action="store_true", help="Use AdamW style decoupled weight decay")
parser.add_argument("--adam_weight_decay", type=float, default=1e-04, help="Weight decay to use for unet params")
parser.add_argument(
"--adam_epsilon",
type=float,
default=1e-08,
help="Epsilon value for the Adam optimizer and Prodigy optimizers.",
)
parser.add_argument("--max_grad_norm", default=1.0, type=float, help="Max gradient norm.")
parser.add_argument("--prodigy_use_bias_correction", action="store_true", help="Turn on Adam's bias correction.")
parser.add_argument(
"--prodigy_safeguard_warmup",
action="store_true",
help="Remove lr from the denominator of D estimate to avoid issues during warm-up stage.",
)
# Other information
parser.add_argument("--tracker_name", type=str, default=None, help="Project tracker name")
parser.add_argument("--push_to_hub", action="store_true", help="Whether or not to push the model to the Hub.")
parser.add_argument("--hub_token", type=str, default=None, help="The token to use to push to the Model Hub.")
parser.add_argument(
"--hub_model_id",
type=str,
default=None,
help="The name of the repository to keep in sync with the local `output_dir`.",
)
parser.add_argument(
"--logging_dir",
type=str,
default="logs",
help="Directory where logs are stored.",
)
parser.add_argument(
"--allow_tf32",
action="store_true",
help=(
"Whether or not to allow TF32 on Ampere GPUs. Can be used to speed up training. For more information, see"
" https://pytorch.org/docs/stable/notes/cuda.html#tensorfloat-32-tf32-on-ampere-devices"
),
)
parser.add_argument(
"--report_to",
type=str,
default=None,
help=(
'The integration to report the results and logs to. Supported platforms are `"tensorboard"`'
' (default), `"wandb"` and `"comet_ml"`. Use `"all"` to report to all integrations.'
),
)
parser.add_argument("--nccl_timeout", type=int, default=600, help="NCCL backend timeout in seconds.")
return parser.parse_args()
class VideoDataset(Dataset):
def __init__(
self,
instance_data_root: Optional[str] = None,
dataset_name: Optional[str] = None,
dataset_config_name: Optional[str] = None,
caption_column: str = "text",
video_column: str = "video",
height: int = 480,
width: int = 720,
fps: int = 8,
max_num_frames: int = 49,
skip_frames_start: int = 0,
skip_frames_end: int = 0,
cache_dir: Optional[str] = None,
id_token: Optional[str] = None,
) -> None:
super().__init__()
self.instance_data_root = Path(instance_data_root) if instance_data_root is not None else None
self.dataset_name = dataset_name
self.dataset_config_name = dataset_config_name
self.caption_column = caption_column
self.video_column = video_column
self.height = height
self.width = width
self.fps = fps
self.max_num_frames = max_num_frames
self.skip_frames_start = skip_frames_start
self.skip_frames_end = skip_frames_end
self.cache_dir = cache_dir
self.id_token = id_token or ""
if dataset_name is not None:
self.instance_prompts, self.instance_video_paths = self._load_dataset_from_hub()
else:
self.instance_prompts, self.instance_video_paths = self._load_dataset_from_local_path()
self.instance_prompts = [self.id_token + prompt for prompt in self.instance_prompts]
self.num_instance_videos = len(self.instance_video_paths)
if self.num_instance_videos != len(self.instance_prompts):
raise ValueError(
f"Expected length of instance prompts and videos to be the same but found {len(self.instance_prompts)=} and {len(self.instance_video_paths)=}. Please ensure that the number of caption prompts and videos match in your dataset."
)
self.instance_videos = self._preprocess_data()
def __len__(self):
return self.num_instance_videos
def __getitem__(self, index):
return {
"instance_prompt": self.instance_prompts[index],
"instance_video": self.instance_videos[index],
}
def _load_dataset_from_hub(self):
try:
from datasets import load_dataset
except ImportError:
raise ImportError(
"You are trying to load your data using the datasets library. If you wish to train using custom "
"captions please install the datasets library: `pip install datasets`. If you wish to load a "
"local folder containing images only, specify --instance_data_root instead."
)
# Downloading and loading a dataset from the hub. See more about loading custom images at
# https://huggingface.co/docs/datasets/v2.0.0/en/dataset_script
dataset = load_dataset(
self.dataset_name,
self.dataset_config_name,
cache_dir=self.cache_dir,
)
column_names = dataset["train"].column_names
if self.video_column is None:
video_column = column_names[0]
logger.info(f"`video_column` defaulting to {video_column}")
else:
video_column = self.video_column
if video_column not in column_names:
raise ValueError(
f"`--video_column` value '{video_column}' not found in dataset columns. Dataset columns are: {', '.join(column_names)}"
)
if self.caption_column is None:
caption_column = column_names[1]
logger.info(f"`caption_column` defaulting to {caption_column}")
else:
caption_column = self.caption_column
if self.caption_column not in column_names:
raise ValueError(
f"`--caption_column` value '{self.caption_column}' not found in dataset columns. Dataset columns are: {', '.join(column_names)}"
)
instance_prompts = dataset["train"][caption_column]
instance_videos = [Path(self.instance_data_root, filepath) for filepath in dataset["train"][video_column]]
return instance_prompts, instance_videos
def _load_dataset_from_local_path(self):
if not self.instance_data_root.exists():
raise ValueError("Instance videos root folder does not exist")
prompt_path = self.instance_data_root.joinpath(self.caption_column)
video_path = self.instance_data_root.joinpath(self.video_column)
if not prompt_path.exists() or not prompt_path.is_file():
raise ValueError(
"Expected `--caption_column` to be path to a file in `--instance_data_root` containing line-separated text prompts."
)
if not video_path.exists() or not video_path.is_file():
raise ValueError(
"Expected `--video_column` to be path to a file in `--instance_data_root` containing line-separated paths to video data in the same directory."
)
with open(prompt_path, "r", encoding="utf-8") as file:
instance_prompts = [line.strip() for line in file.readlines() if len(line.strip()) > 0]
with open(video_path, "r", encoding="utf-8") as file:
instance_videos = [
self.instance_data_root.joinpath(line.strip()) for line in file.readlines() if len(line.strip()) > 0
]
if any(not path.is_file() for path in instance_videos):
raise ValueError(
"Expected '--video_column' to be a path to a file in `--instance_data_root` containing line-separated paths to video data but found atleast one path that is not a valid file."
)
return instance_prompts, instance_videos
def _preprocess_data(self):
try:
import decord
except ImportError:
raise ImportError(
"The `decord` package is required for loading the video dataset. Install with `pip install decord`"
)
decord.bridge.set_bridge("torch")
videos = []
train_transforms = transforms.Compose(
[
transforms.Lambda(lambda x: x / 255.0 * 2.0 - 1.0),
]
)
for filename in self.instance_video_paths:
video_reader = decord.VideoReader(uri=filename.as_posix(), width=self.width, height=self.height)
video_num_frames = len(video_reader)
start_frame = min(self.skip_frames_start, video_num_frames)
end_frame = max(0, video_num_frames - self.skip_frames_end)
if end_frame <= start_frame:
frames = video_reader.get_batch([start_frame])
elif end_frame - start_frame <= self.max_num_frames:
frames = video_reader.get_batch(list(range(start_frame, end_frame)))
else:
indices = list(range(start_frame, end_frame, (end_frame - start_frame) // self.max_num_frames))
frames = video_reader.get_batch(indices)
# Ensure that we don't go over the limit
frames = frames[: self.max_num_frames]
selected_num_frames = frames.shape[0]
# Choose first (4k + 1) frames as this is how many is required by the VAE
remainder = (3 + (selected_num_frames % 4)) % 4
if remainder != 0:
frames = frames[:-remainder]
selected_num_frames = frames.shape[0]
assert (selected_num_frames - 1) % 4 == 0
# Training transforms
frames = frames.float()
frames = torch.stack([train_transforms(frame) for frame in frames], dim=0)
videos.append(frames.permute(0, 3, 1, 2).contiguous()) # [F, C, H, W]
return videos
def save_model_card(
repo_id: str,
videos=None,
base_model: str = None,
validation_prompt=None,
repo_folder=None,
fps=8,
):
widget_dict = []
if videos is not None:
for i, video in enumerate(videos):
video_path = f"final_video_{i}.mp4"
export_to_video(video, os.path.join(repo_folder, video_path, fps=fps))
widget_dict.append(
{"text": validation_prompt if validation_prompt else " ", "output": {"url": video_path}},
)
model_description = f"""
# CogVideoX LoRA - {repo_id}
<Gallery />
## Model description
These are {repo_id} LoRA weights for {base_model}.
The weights were trained using the [CogVideoX Diffusers trainer](https://github.com/huggingface/diffusers/blob/main/examples/cogvideo/train_cogvideox_image_to_video_lora.py).
Was LoRA for the text encoder enabled? No.
## Download model
[Download the *.safetensors LoRA]({repo_id}/tree/main) in the Files & versions tab.
## Use it with the [🧨 diffusers library](https://github.com/huggingface/diffusers)
```py
import torch
from diffusers import CogVideoXImageToVideoPipeline
from diffusers.utils import load_image, export_to_video
pipe = CogVideoXImageToVideoPipeline.from_pretrained("THUDM/CogVideoX-5b", torch_dtype=torch.bfloat16).to("cuda")
pipe.load_lora_weights("{repo_id}", weight_name="pytorch_lora_weights.safetensors", adapter_name=["cogvideox-i2v-lora"])
# The LoRA adapter weights are determined by what was used for training.
# In this case, we assume `--lora_alpha` is 32 and `--rank` is 64.
# It can be made lower or higher from what was used in training to decrease or amplify the effect
# of the LoRA upto a tolerance, beyond which one might notice no effect at all or overflows.
pipe.set_adapters(["cogvideox-i2v-lora"], [32 / 64])
image = load_image("/path/to/image")
video = pipe(image=image, "{validation_prompt}", guidance_scale=6, use_dynamic_cfg=True).frames[0]
export_to_video(video, "output.mp4", fps=8)
```
For more details, including weighting, merging and fusing LoRAs, check the [documentation on loading LoRAs in diffusers](https://huggingface.co/docs/diffusers/main/en/using-diffusers/loading_adapters)
## License
Please adhere to the licensing terms as described [here](https://huggingface.co/THUDM/CogVideoX-5b-I2V/blob/main/LICENSE).
"""
model_card = load_or_create_model_card(
repo_id_or_path=repo_id,
from_training=True,
license="other",
base_model=base_model,
prompt=validation_prompt,
model_description=model_description,
widget=widget_dict,
)
tags = [
"image-to-video",
"diffusers-training",
"diffusers",
"lora",
"cogvideox",
"cogvideox-diffusers",
"template:sd-lora",
]
model_card = populate_model_card(model_card, tags=tags)
model_card.save(os.path.join(repo_folder, "README.md"))
def log_validation(
pipe,
args,
accelerator,
pipeline_args,
epoch,
is_final_validation: bool = False,
):
logger.info(
f"Running validation... \n Generating {args.num_validation_videos} videos with prompt: {pipeline_args['prompt']}."
)
# We train on the simplified learning objective. If we were previously predicting a variance, we need the scheduler to ignore it
scheduler_args = {}
if "variance_type" in pipe.scheduler.config:
variance_type = pipe.scheduler.config.variance_type
if variance_type in ["learned", "learned_range"]:
variance_type = "fixed_small"
scheduler_args["variance_type"] = variance_type
pipe.scheduler = CogVideoXDPMScheduler.from_config(pipe.scheduler.config, **scheduler_args)
pipe = pipe.to(accelerator.device)
# pipe.set_progress_bar_config(disable=True)
# run inference
generator = torch.Generator(device=accelerator.device).manual_seed(args.seed) if args.seed else None
videos = []
for _ in range(args.num_validation_videos):
video = pipe(**pipeline_args, generator=generator, output_type="np").frames[0]
videos.append(video)
for tracker in accelerator.trackers:
phase_name = "test" if is_final_validation else "validation"
if tracker.name == "wandb":
video_filenames = []
for i, video in enumerate(videos):
prompt = (
pipeline_args["prompt"][:25]
.replace(" ", "_")
.replace(" ", "_")
.replace("'", "_")
.replace('"', "_")
.replace("/", "_")
)
filename = os.path.join(args.output_dir, f"{phase_name}_video_{i}_{prompt}.mp4")
export_to_video(video, filename, fps=8)
video_filenames.append(filename)
tracker.log(
{
phase_name: [
wandb.Video(filename, caption=f"{i}: {pipeline_args['prompt']}")
for i, filename in enumerate(video_filenames)
]
}
)
del pipe
free_memory()
return videos
def _get_t5_prompt_embeds(
tokenizer: T5Tokenizer,
text_encoder: T5EncoderModel,
prompt: Union[str, List[str]],
num_videos_per_prompt: int = 1,
max_sequence_length: int = 226,
device: Optional[torch.device] = None,
dtype: Optional[torch.dtype] = None,
text_input_ids=None,
):
prompt = [prompt] if isinstance(prompt, str) else prompt
batch_size = len(prompt)
if tokenizer is not None:
text_inputs = tokenizer(
prompt,
padding="max_length",
max_length=max_sequence_length,
truncation=True,
add_special_tokens=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
else:
if text_input_ids is None:
raise ValueError("`text_input_ids` must be provided when the tokenizer is not specified.")
prompt_embeds = text_encoder(text_input_ids.to(device))[0]
prompt_embeds = prompt_embeds.to(dtype=dtype, device=device)
# duplicate text embeddings for each generation per prompt, using mps friendly method
_, seq_len, _ = prompt_embeds.shape
prompt_embeds = prompt_embeds.repeat(1, num_videos_per_prompt, 1)
prompt_embeds = prompt_embeds.view(batch_size * num_videos_per_prompt, seq_len, -1)
return prompt_embeds
def encode_prompt(
tokenizer: T5Tokenizer,
text_encoder: T5EncoderModel,
prompt: Union[str, List[str]],
num_videos_per_prompt: int = 1,
max_sequence_length: int = 226,
device: Optional[torch.device] = None,
dtype: Optional[torch.dtype] = None,
text_input_ids=None,
):
prompt = [prompt] if isinstance(prompt, str) else prompt
prompt_embeds = _get_t5_prompt_embeds(
tokenizer,
text_encoder,
prompt=prompt,
num_videos_per_prompt=num_videos_per_prompt,
max_sequence_length=max_sequence_length,
device=device,
dtype=dtype,
text_input_ids=text_input_ids,
)
return prompt_embeds
def compute_prompt_embeddings(
tokenizer, text_encoder, prompt, max_sequence_length, device, dtype, requires_grad: bool = False
):
if requires_grad:
prompt_embeds = encode_prompt(
tokenizer,
text_encoder,
prompt,
num_videos_per_prompt=1,
max_sequence_length=max_sequence_length,
device=device,
dtype=dtype,
)
else:
with torch.no_grad():
prompt_embeds = encode_prompt(
tokenizer,
text_encoder,
prompt,
num_videos_per_prompt=1,
max_sequence_length=max_sequence_length,
device=device,
dtype=dtype,
)
return prompt_embeds
def prepare_rotary_positional_embeddings(
height: int,
width: int,
num_frames: int,
vae_scale_factor_spatial: int = 8,
patch_size: int = 2,
attention_head_dim: int = 64,
device: Optional[torch.device] = None,
base_height: int = 480,
base_width: int = 720,
) -> Tuple[torch.Tensor, torch.Tensor]:
grid_height = height // (vae_scale_factor_spatial * patch_size)
grid_width = width // (vae_scale_factor_spatial * patch_size)
base_size_width = base_width // (vae_scale_factor_spatial * patch_size)
base_size_height = base_height // (vae_scale_factor_spatial * patch_size)
grid_crops_coords = get_resize_crop_region_for_grid((grid_height, grid_width), base_size_width, base_size_height)
freqs_cos, freqs_sin = get_3d_rotary_pos_embed(
embed_dim=attention_head_dim,
crops_coords=grid_crops_coords,
grid_size=(grid_height, grid_width),
temporal_size=num_frames,
device=device,
)
return freqs_cos, freqs_sin
def get_optimizer(args, params_to_optimize, use_deepspeed: bool = False):
# Use DeepSpeed optimzer
if use_deepspeed:
from accelerate.utils import DummyOptim
return DummyOptim(
params_to_optimize,
lr=args.learning_rate,
betas=(args.adam_beta1, args.adam_beta2),
eps=args.adam_epsilon,
weight_decay=args.adam_weight_decay,
)
# Optimizer creation
supported_optimizers = ["adam", "adamw", "prodigy"]
if args.optimizer not in supported_optimizers:
logger.warning(
f"Unsupported choice of optimizer: {args.optimizer}. Supported optimizers include {supported_optimizers}. Defaulting to AdamW"
)
args.optimizer = "adamw"
if args.use_8bit_adam and args.optimizer.lower() not in ["adam", "adamw"]:
logger.warning(
f"use_8bit_adam is ignored when optimizer is not set to 'Adam' or 'AdamW'. Optimizer was "
f"set to {args.optimizer.lower()}"
)
if args.use_8bit_adam:
try:
import bitsandbytes as bnb
except ImportError:
raise ImportError(
"To use 8-bit Adam, please install the bitsandbytes library: `pip install bitsandbytes`."
)
if args.optimizer.lower() == "adamw":
optimizer_class = bnb.optim.AdamW8bit if args.use_8bit_adam else torch.optim.AdamW
optimizer = optimizer_class(
params_to_optimize,
betas=(args.adam_beta1, args.adam_beta2),
eps=args.adam_epsilon,
weight_decay=args.adam_weight_decay,
)
elif args.optimizer.lower() == "adam":
optimizer_class = bnb.optim.Adam8bit if args.use_8bit_adam else torch.optim.Adam
optimizer = optimizer_class(
params_to_optimize,
betas=(args.adam_beta1, args.adam_beta2),
eps=args.adam_epsilon,
weight_decay=args.adam_weight_decay,
)
elif args.optimizer.lower() == "prodigy":
try:
import prodigyopt
except ImportError:
raise ImportError("To use Prodigy, please install the prodigyopt library: `pip install prodigyopt`")
optimizer_class = prodigyopt.Prodigy
if args.learning_rate <= 0.1:
logger.warning(
"Learning rate is too low. When using prodigy, it's generally better to set learning rate around 1.0"
)
optimizer = optimizer_class(
params_to_optimize,
betas=(args.adam_beta1, args.adam_beta2),
beta3=args.prodigy_beta3,
weight_decay=args.adam_weight_decay,
eps=args.adam_epsilon,
decouple=args.prodigy_decouple,
use_bias_correction=args.prodigy_use_bias_correction,
safeguard_warmup=args.prodigy_safeguard_warmup,
)
return optimizer
def main(args):
if args.report_to == "wandb" and args.hub_token is not None:
raise ValueError(
"You cannot use both --report_to=wandb and --hub_token due to a security risk of exposing your token."
" Please use `huggingface-cli login` to authenticate with the Hub."
)
if torch.backends.mps.is_available() and args.mixed_precision == "bf16":
# due to pytorch#99272, MPS does not yet support bfloat16.
raise ValueError(
"Mixed precision training with bfloat16 is not supported on MPS. Please use fp16 (recommended) or fp32 instead."
)
logging_dir = Path(args.output_dir, args.logging_dir)
accelerator_project_config = ProjectConfiguration(project_dir=args.output_dir, logging_dir=logging_dir)
ddp_kwargs = DistributedDataParallelKwargs(find_unused_parameters=True)
init_kwargs = InitProcessGroupKwargs(backend="nccl", timeout=timedelta(seconds=args.nccl_timeout))
accelerator = Accelerator(
gradient_accumulation_steps=args.gradient_accumulation_steps,
mixed_precision=args.mixed_precision,
log_with=args.report_to,
project_config=accelerator_project_config,
kwargs_handlers=[ddp_kwargs, init_kwargs],
)
# Disable AMP for MPS.
if torch.backends.mps.is_available():
accelerator.native_amp = False
if args.report_to == "wandb":
if not is_wandb_available():
raise ImportError("Make sure to install wandb if you want to use it for logging during training.")
# Make one log on every process with the configuration for debugging.
logging.basicConfig(
format="%(asctime)s - %(levelname)s - %(name)s - %(message)s",
datefmt="%m/%d/%Y %H:%M:%S",
level=logging.INFO,
)
logger.info(accelerator.state, main_process_only=False)
if accelerator.is_local_main_process:
transformers.utils.logging.set_verbosity_warning()
diffusers.utils.logging.set_verbosity_info()
else:
transformers.utils.logging.set_verbosity_error()
diffusers.utils.logging.set_verbosity_error()
# If passed along, set the training seed now.
if args.seed is not None:
set_seed(args.seed)
# Handle the repository creation
if accelerator.is_main_process:
if args.output_dir is not None:
os.makedirs(args.output_dir, exist_ok=True)
if args.push_to_hub:
repo_id = create_repo(
repo_id=args.hub_model_id or Path(args.output_dir).name,
exist_ok=True,
).repo_id
# Prepare models and scheduler
tokenizer = AutoTokenizer.from_pretrained(
args.pretrained_model_name_or_path, subfolder="tokenizer", revision=args.revision
)
text_encoder = T5EncoderModel.from_pretrained(
args.pretrained_model_name_or_path, subfolder="text_encoder", revision=args.revision
)
# CogVideoX-2b weights are stored in float16
# CogVideoX-5b and CogVideoX-5b-I2V weights are stored in bfloat16
load_dtype = torch.bfloat16 if "5b" in args.pretrained_model_name_or_path.lower() else torch.float16
transformer = CogVideoXTransformer3DModel.from_pretrained(
args.pretrained_model_name_or_path,
subfolder="transformer",
torch_dtype=load_dtype,
revision=args.revision,
variant=args.variant,
)
vae = AutoencoderKLCogVideoX.from_pretrained(
args.pretrained_model_name_or_path, subfolder="vae", revision=args.revision, variant=args.variant
)
scheduler = CogVideoXDPMScheduler.from_pretrained(args.pretrained_model_name_or_path, subfolder="scheduler")
if args.enable_slicing:
vae.enable_slicing()
if args.enable_tiling:
vae.enable_tiling()
# We only train the additional adapter LoRA layers
text_encoder.requires_grad_(False)
transformer.requires_grad_(False)
vae.requires_grad_(False)
# For mixed precision training we cast all non-trainable weights (vae, text_encoder and transformer) to half-precision
# as these weights are only used for inference, keeping weights in full precision is not required.
weight_dtype = torch.float32
if accelerator.state.deepspeed_plugin:
# DeepSpeed is handling precision, use what's in the DeepSpeed config
if (
"fp16" in accelerator.state.deepspeed_plugin.deepspeed_config
and accelerator.state.deepspeed_plugin.deepspeed_config["fp16"]["enabled"]
):
weight_dtype = torch.float16
if (
"bf16" in accelerator.state.deepspeed_plugin.deepspeed_config
and accelerator.state.deepspeed_plugin.deepspeed_config["bf16"]["enabled"]
):
weight_dtype = torch.float16
else:
if accelerator.mixed_precision == "fp16":
weight_dtype = torch.float16
elif accelerator.mixed_precision == "bf16":
weight_dtype = torch.bfloat16
if torch.backends.mps.is_available() and weight_dtype == torch.bfloat16:
# due to pytorch#99272, MPS does not yet support bfloat16.
raise ValueError(
"Mixed precision training with bfloat16 is not supported on MPS. Please use fp16 (recommended) or fp32 instead."
)
text_encoder.to(accelerator.device, dtype=weight_dtype)
transformer.to(accelerator.device, dtype=weight_dtype)
vae.to(accelerator.device, dtype=weight_dtype)
if args.gradient_checkpointing:
transformer.enable_gradient_checkpointing()
# now we will add new LoRA weights to the attention layers
transformer_lora_config = LoraConfig(
r=args.rank,
lora_alpha=args.lora_alpha,
init_lora_weights=True,
target_modules=["to_k", "to_q", "to_v", "to_out.0"],
)
transformer.add_adapter(transformer_lora_config)
def unwrap_model(model):
model = accelerator.unwrap_model(model)
model = model._orig_mod if is_compiled_module(model) else model
return model
# create custom saving & loading hooks so that `accelerator.save_state(...)` serializes in a nice format
def save_model_hook(models, weights, output_dir):
if accelerator.is_main_process:
transformer_lora_layers_to_save = None
for model in models:
if isinstance(model, type(unwrap_model(transformer))):
transformer_lora_layers_to_save = get_peft_model_state_dict(model)
else:
raise ValueError(f"unexpected save model: {model.__class__}")
# make sure to pop weight so that corresponding model is not saved again
weights.pop()
CogVideoXImageToVideoPipeline.save_lora_weights(
output_dir,
transformer_lora_layers=transformer_lora_layers_to_save,
)
def load_model_hook(models, input_dir):
transformer_ = None
while len(models) > 0:
model = models.pop()
if isinstance(model, type(unwrap_model(transformer))):
transformer_ = model
else:
raise ValueError(f"Unexpected save model: {model.__class__}")
lora_state_dict = CogVideoXImageToVideoPipeline.lora_state_dict(input_dir)
transformer_state_dict = {
f'{k.replace("transformer.", "")}': v for k, v in lora_state_dict.items() if k.startswith("transformer.")
}
transformer_state_dict = convert_unet_state_dict_to_peft(transformer_state_dict)
incompatible_keys = set_peft_model_state_dict(transformer_, transformer_state_dict, adapter_name="default")
if incompatible_keys is not None:
# check only for unexpected keys
unexpected_keys = getattr(incompatible_keys, "unexpected_keys", None)
if unexpected_keys:
logger.warning(
f"Loading adapter weights from state_dict led to unexpected keys not found in the model: "
f" {unexpected_keys}. "
)
# Make sure the trainable params are in float32. This is again needed since the base models
# are in `weight_dtype`. More details:
# https://github.com/huggingface/diffusers/pull/6514#discussion_r1449796804
if args.mixed_precision == "fp16":
# only upcast trainable parameters (LoRA) into fp32
cast_training_params([transformer_])
accelerator.register_save_state_pre_hook(save_model_hook)
accelerator.register_load_state_pre_hook(load_model_hook)
# Enable TF32 for faster training on Ampere GPUs,
# cf https://pytorch.org/docs/stable/notes/cuda.html#tensorfloat-32-tf32-on-ampere-devices
if args.allow_tf32 and torch.cuda.is_available():
torch.backends.cuda.matmul.allow_tf32 = True
if args.scale_lr:
args.learning_rate = (
args.learning_rate * args.gradient_accumulation_steps * args.train_batch_size * accelerator.num_processes
)
# Make sure the trainable params are in float32.
if args.mixed_precision == "fp16":
# only upcast trainable parameters (LoRA) into fp32
cast_training_params([transformer], dtype=torch.float32)
transformer_lora_parameters = list(filter(lambda p: p.requires_grad, transformer.parameters()))
# Optimization parameters
transformer_parameters_with_lr = {"params": transformer_lora_parameters, "lr": args.learning_rate}
params_to_optimize = [transformer_parameters_with_lr]
use_deepspeed_optimizer = (
accelerator.state.deepspeed_plugin is not None
and "optimizer" in accelerator.state.deepspeed_plugin.deepspeed_config
)
use_deepspeed_scheduler = (
accelerator.state.deepspeed_plugin is not None
and "scheduler" in accelerator.state.deepspeed_plugin.deepspeed_config
)
optimizer = get_optimizer(args, params_to_optimize, use_deepspeed=use_deepspeed_optimizer)
# Dataset and DataLoader
train_dataset = VideoDataset(
instance_data_root=args.instance_data_root,
dataset_name=args.dataset_name,
dataset_config_name=args.dataset_config_name,
caption_column=args.caption_column,
video_column=args.video_column,
height=args.height,
width=args.width,
fps=args.fps,
max_num_frames=args.max_num_frames,
skip_frames_start=args.skip_frames_start,
skip_frames_end=args.skip_frames_end,
cache_dir=args.cache_dir,
id_token=args.id_token,
)
def encode_video(video):
video = video.to(accelerator.device, dtype=vae.dtype).unsqueeze(0)
video = video.permute(0, 2, 1, 3, 4) # [B, C, F, H, W]
image = video[:, :, :1].clone()
latent_dist = vae.encode(video).latent_dist
image_noise_sigma = torch.normal(mean=-3.0, std=0.5, size=(1,), device=image.device)
image_noise_sigma = torch.exp(image_noise_sigma).to(dtype=image.dtype)
noisy_image = image + torch.randn_like(image) * image_noise_sigma[:, None, None, None, None]
image_latent_dist = vae.encode(noisy_image).latent_dist
return latent_dist, image_latent_dist
train_dataset.instance_prompts = [
compute_prompt_embeddings(
tokenizer,
text_encoder,
[prompt],
transformer.config.max_text_seq_length,
accelerator.device,
weight_dtype,
requires_grad=False,
)
for prompt in train_dataset.instance_prompts
]
train_dataset.instance_videos = [encode_video(video) for video in train_dataset.instance_videos]
def collate_fn(examples):
videos = []
images = []
for example in examples:
latent_dist, image_latent_dist = example["instance_video"]
video_latents = latent_dist.sample() * vae.config.scaling_factor
image_latents = image_latent_dist.sample() * vae.config.scaling_factor
video_latents = video_latents.permute(0, 2, 1, 3, 4)
image_latents = image_latents.permute(0, 2, 1, 3, 4)
padding_shape = (video_latents.shape[0], video_latents.shape[1] - 1, *video_latents.shape[2:])
latent_padding = image_latents.new_zeros(padding_shape)
image_latents = torch.cat([image_latents, latent_padding], dim=1)
if random.random() < args.noised_image_dropout:
image_latents = torch.zeros_like(image_latents)
videos.append(video_latents)
images.append(image_latents)
videos = torch.cat(videos)
images = torch.cat(images)
videos = videos.to(memory_format=torch.contiguous_format).float()
images = images.to(memory_format=torch.contiguous_format).float()
prompts = [example["instance_prompt"] for example in examples]
prompts = torch.cat(prompts)
return {
"videos": (videos, images),
"prompts": prompts,
}
train_dataloader = DataLoader(
train_dataset,
batch_size=args.train_batch_size,
shuffle=True,
collate_fn=collate_fn,
num_workers=args.dataloader_num_workers,
)
# Scheduler and math around the number of training steps.
overrode_max_train_steps = False
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if args.max_train_steps is None:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
overrode_max_train_steps = True
if use_deepspeed_scheduler:
from accelerate.utils import DummyScheduler
lr_scheduler = DummyScheduler(
name=args.lr_scheduler,
optimizer=optimizer,
total_num_steps=args.max_train_steps * accelerator.num_processes,
num_warmup_steps=args.lr_warmup_steps * accelerator.num_processes,
)
else:
lr_scheduler = get_scheduler(
args.lr_scheduler,
optimizer=optimizer,
num_warmup_steps=args.lr_warmup_steps * accelerator.num_processes,
num_training_steps=args.max_train_steps * accelerator.num_processes,
num_cycles=args.lr_num_cycles,
power=args.lr_power,
)
# Prepare everything with our `accelerator`.
transformer, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
transformer, optimizer, train_dataloader, lr_scheduler
)
# We need to recalculate our total training steps as the size of the training dataloader may have changed.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if overrode_max_train_steps:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
# Afterwards we recalculate our number of training epochs
args.num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# We need to initialize the trackers we use, and also store our configuration.
# The trackers initializes automatically on the main process.
if accelerator.is_main_process:
tracker_name = args.tracker_name or "cogvideox-i2v-lora"
accelerator.init_trackers(tracker_name, config=vars(args))
# Train!
total_batch_size = args.train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps
num_trainable_parameters = sum(param.numel() for model in params_to_optimize for param in model["params"])
logger.info("***** Running training *****")
logger.info(f" Num trainable parameters = {num_trainable_parameters}")
logger.info(f" Num examples = {len(train_dataset)}")
logger.info(f" Num batches each epoch = {len(train_dataloader)}")
logger.info(f" Num epochs = {args.num_train_epochs}")
logger.info(f" Instantaneous batch size per device = {args.train_batch_size}")
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_batch_size}")
logger.info(f" Gradient accumulation steps = {args.gradient_accumulation_steps}")
logger.info(f" Total optimization steps = {args.max_train_steps}")
global_step = 0
first_epoch = 0
# Potentially load in the weights and states from a previous save
if not args.resume_from_checkpoint:
initial_global_step = 0
else:
if args.resume_from_checkpoint != "latest":
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the mos recent checkpoint
dirs = os.listdir(args.output_dir)
dirs = [d for d in dirs if d.startswith("checkpoint")]
dirs = sorted(dirs, key=lambda x: int(x.split("-")[1]))
path = dirs[-1] if len(dirs) > 0 else None
if path is None:
accelerator.print(
f"Checkpoint '{args.resume_from_checkpoint}' does not exist. Starting a new training run."
)
args.resume_from_checkpoint = None
initial_global_step = 0
else:
accelerator.print(f"Resuming from checkpoint {path}")
accelerator.load_state(os.path.join(args.output_dir, path))
global_step = int(path.split("-")[1])
initial_global_step = global_step
first_epoch = global_step // num_update_steps_per_epoch
progress_bar = tqdm(
range(0, args.max_train_steps),
initial=initial_global_step,
desc="Steps",
# Only show the progress bar once on each machine.
disable=not accelerator.is_local_main_process,
)
vae_scale_factor_spatial = 2 ** (len(vae.config.block_out_channels) - 1)
# For DeepSpeed training
model_config = transformer.module.config if hasattr(transformer, "module") else transformer.config
for epoch in range(first_epoch, args.num_train_epochs):
transformer.train()
for step, batch in enumerate(train_dataloader):
models_to_accumulate = [transformer]
with accelerator.accumulate(models_to_accumulate):
video_latents, image_latents = batch["videos"]
prompt_embeds = batch["prompts"]
video_latents = video_latents.to(dtype=weight_dtype) # [B, F, C, H, W]
image_latents = image_latents.to(dtype=weight_dtype) # [B, F, C, H, W]
batch_size, num_frames, num_channels, height, width = video_latents.shape
# Sample a random timestep for each image
timesteps = torch.randint(
0, scheduler.config.num_train_timesteps, (batch_size,), device=video_latents.device
)
timesteps = timesteps.long()
# Sample noise that will be added to the latents
noise = torch.randn_like(video_latents)
# Add noise to the model input according to the noise magnitude at each timestep
# (this is the forward diffusion process)
noisy_video_latents = scheduler.add_noise(video_latents, noise, timesteps)
noisy_model_input = torch.cat([noisy_video_latents, image_latents], dim=2)
# Prepare rotary embeds
image_rotary_emb = (
prepare_rotary_positional_embeddings(
height=args.height,
width=args.width,
num_frames=num_frames,
vae_scale_factor_spatial=vae_scale_factor_spatial,
patch_size=model_config.patch_size,
attention_head_dim=model_config.attention_head_dim,
device=accelerator.device,
)
if model_config.use_rotary_positional_embeddings
else None
)
# Predict the noise residual
model_output = transformer(
hidden_states=noisy_model_input,
encoder_hidden_states=prompt_embeds,
timestep=timesteps,
image_rotary_emb=image_rotary_emb,
return_dict=False,
)[0]
model_pred = scheduler.get_velocity(model_output, noisy_video_latents, timesteps)
alphas_cumprod = scheduler.alphas_cumprod[timesteps]
weights = 1 / (1 - alphas_cumprod)
while len(weights.shape) < len(model_pred.shape):
weights = weights.unsqueeze(-1)
target = video_latents
loss = torch.mean((weights * (model_pred - target) ** 2).reshape(batch_size, -1), dim=1)
loss = loss.mean()
accelerator.backward(loss)
if accelerator.sync_gradients:
params_to_clip = transformer.parameters()
accelerator.clip_grad_norm_(params_to_clip, args.max_grad_norm)
if accelerator.state.deepspeed_plugin is None:
optimizer.step()
optimizer.zero_grad()
lr_scheduler.step()
# Checks if the accelerator has performed an optimization step behind the scenes
if accelerator.sync_gradients:
progress_bar.update(1)
global_step += 1
if accelerator.is_main_process or accelerator.distributed_type == DistributedType.DEEPSPEED:
if global_step % args.checkpointing_steps == 0:
# _before_ saving state, check if this save would set us over the `checkpoints_total_limit`
if args.checkpoints_total_limit is not None:
checkpoints = os.listdir(args.output_dir)
checkpoints = [d for d in checkpoints if d.startswith("checkpoint")]
checkpoints = sorted(checkpoints, key=lambda x: int(x.split("-")[1]))
# before we save the new checkpoint, we need to have at _most_ `checkpoints_total_limit - 1` checkpoints
if len(checkpoints) >= args.checkpoints_total_limit:
num_to_remove = len(checkpoints) - args.checkpoints_total_limit + 1
removing_checkpoints = checkpoints[0:num_to_remove]
logger.info(
f"{len(checkpoints)} checkpoints already exist, removing {len(removing_checkpoints)} checkpoints"
)
logger.info(f"Removing checkpoints: {', '.join(removing_checkpoints)}")
for removing_checkpoint in removing_checkpoints:
removing_checkpoint = os.path.join(args.output_dir, removing_checkpoint)
shutil.rmtree(removing_checkpoint)
save_path = os.path.join(args.output_dir, f"checkpoint-{global_step}")
accelerator.save_state(save_path)
logger.info(f"Saved state to {save_path}")
logs = {"loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0]}
progress_bar.set_postfix(**logs)
accelerator.log(logs, step=global_step)
if global_step >= args.max_train_steps:
break
if accelerator.is_main_process:
if args.validation_prompt is not None and (epoch + 1) % args.validation_epochs == 0:
# Create pipeline
pipe = CogVideoXImageToVideoPipeline.from_pretrained(
args.pretrained_model_name_or_path,
transformer=unwrap_model(transformer),
scheduler=scheduler,
revision=args.revision,
variant=args.variant,
torch_dtype=weight_dtype,
)
validation_prompts = args.validation_prompt.split(args.validation_prompt_separator)
validation_images = args.validation_images.split(args.validation_prompt_separator)
for validation_image, validation_prompt in zip(validation_images, validation_prompts):
pipeline_args = {
"image": load_image(validation_image),
"prompt": validation_prompt,
"guidance_scale": args.guidance_scale,
"use_dynamic_cfg": args.use_dynamic_cfg,
"height": args.height,
"width": args.width,
}
validation_outputs = log_validation(
pipe=pipe,
args=args,
accelerator=accelerator,
pipeline_args=pipeline_args,
epoch=epoch,
)
# Save the lora layers
accelerator.wait_for_everyone()
if accelerator.is_main_process:
transformer = unwrap_model(transformer)
dtype = (
torch.float16
if args.mixed_precision == "fp16"
else torch.bfloat16
if args.mixed_precision == "bf16"
else torch.float32
)
transformer = transformer.to(dtype)
transformer_lora_layers = get_peft_model_state_dict(transformer)
CogVideoXImageToVideoPipeline.save_lora_weights(
save_directory=args.output_dir,
transformer_lora_layers=transformer_lora_layers,
)
# Cleanup trained models to save memory
del transformer
free_memory()
# Final test inference
pipe = CogVideoXImageToVideoPipeline.from_pretrained(
args.pretrained_model_name_or_path,
revision=args.revision,
variant=args.variant,
torch_dtype=weight_dtype,
)
pipe.scheduler = CogVideoXDPMScheduler.from_config(pipe.scheduler.config)
if args.enable_slicing:
pipe.vae.enable_slicing()
if args.enable_tiling:
pipe.vae.enable_tiling()
# Load LoRA weights
lora_scaling = args.lora_alpha / args.rank
pipe.load_lora_weights(args.output_dir, adapter_name="cogvideox-i2v-lora")
pipe.set_adapters(["cogvideox-i2v-lora"], [lora_scaling])
# Run inference
validation_outputs = []
if args.validation_prompt and args.num_validation_videos > 0:
validation_prompts = args.validation_prompt.split(args.validation_prompt_separator)
validation_images = args.validation_images.split(args.validation_prompt_separator)
for validation_image, validation_prompt in zip(validation_images, validation_prompts):
pipeline_args = {
"image": load_image(validation_image),
"prompt": validation_prompt,
"guidance_scale": args.guidance_scale,
"use_dynamic_cfg": args.use_dynamic_cfg,
"height": args.height,
"width": args.width,
}
video = log_validation(
pipe=pipe,
args=args,
accelerator=accelerator,
pipeline_args=pipeline_args,
epoch=epoch,
is_final_validation=True,
)
validation_outputs.extend(video)
if args.push_to_hub:
validation_prompt = args.validation_prompt or ""
validation_prompt = validation_prompt.split(args.validation_prompt_separator)[0]
save_model_card(
repo_id,
videos=validation_outputs,
base_model=args.pretrained_model_name_or_path,
validation_prompt=validation_prompt,
repo_folder=args.output_dir,
fps=args.fps,
)
upload_folder(
repo_id=repo_id,
folder_path=args.output_dir,
commit_message="End of training",
ignore_patterns=["step_*", "epoch_*"],
)
accelerator.end_training()
if __name__ == "__main__":
args = get_args()
main(args)
| diffusers/examples/cogvideo/train_cogvideox_image_to_video_lora.py/0 | {
"file_path": "diffusers/examples/cogvideo/train_cogvideox_image_to_video_lora.py",
"repo_id": "diffusers",
"token_count": 28144
} |
import math
import numbers
from typing import Any, Callable, Dict, List, Optional, Union
import torch
import torch.nn.functional as F
from torch import nn
from diffusers.image_processor import PipelineImageInput
from diffusers.models import AsymmetricAutoencoderKL, ImageProjection
from diffusers.models.attention_processor import Attention, AttnProcessor
from diffusers.pipelines.stable_diffusion import StableDiffusionPipelineOutput
from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_inpaint import (
StableDiffusionInpaintPipeline,
retrieve_timesteps,
)
from diffusers.utils import deprecate
class RASGAttnProcessor:
def __init__(self, mask, token_idx, scale_factor):
self.attention_scores = None # Stores the last output of the similarity matrix here. Each layer will get its own RASGAttnProcessor assigned
self.mask = mask
self.token_idx = token_idx
self.scale_factor = scale_factor
self.mask_resoltuion = mask.shape[-1] * mask.shape[-2] # 64 x 64 if the image is 512x512
def __call__(
self,
attn: Attention,
hidden_states: torch.Tensor,
encoder_hidden_states: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
temb: Optional[torch.Tensor] = None,
scale: float = 1.0,
) -> torch.Tensor:
# Same as the default AttnProcessor up untill the part where similarity matrix gets saved
downscale_factor = self.mask_resoltuion // hidden_states.shape[1]
residual = hidden_states
if attn.spatial_norm is not None:
hidden_states = attn.spatial_norm(hidden_states, temb)
input_ndim = hidden_states.ndim
if input_ndim == 4:
batch_size, channel, height, width = hidden_states.shape
hidden_states = hidden_states.view(batch_size, channel, height * width).transpose(1, 2)
batch_size, sequence_length, _ = (
hidden_states.shape if encoder_hidden_states is None else encoder_hidden_states.shape
)
attention_mask = attn.prepare_attention_mask(attention_mask, sequence_length, batch_size)
if attn.group_norm is not None:
hidden_states = attn.group_norm(hidden_states.transpose(1, 2)).transpose(1, 2)
query = attn.to_q(hidden_states)
if encoder_hidden_states is None:
encoder_hidden_states = hidden_states
elif attn.norm_cross:
encoder_hidden_states = attn.norm_encoder_hidden_states(encoder_hidden_states)
key = attn.to_k(encoder_hidden_states)
value = attn.to_v(encoder_hidden_states)
query = attn.head_to_batch_dim(query)
key = attn.head_to_batch_dim(key)
value = attn.head_to_batch_dim(value)
# Automatically recognize the resolution and save the attention similarity values
# We need to use the values before the softmax function, hence the rewritten get_attention_scores function.
if downscale_factor == self.scale_factor**2:
self.attention_scores = get_attention_scores(attn, query, key, attention_mask)
attention_probs = self.attention_scores.softmax(dim=-1)
attention_probs = attention_probs.to(query.dtype)
else:
attention_probs = attn.get_attention_scores(query, key, attention_mask) # Original code
hidden_states = torch.bmm(attention_probs, value)
hidden_states = attn.batch_to_head_dim(hidden_states)
# linear proj
hidden_states = attn.to_out[0](hidden_states)
# dropout
hidden_states = attn.to_out[1](hidden_states)
if input_ndim == 4:
hidden_states = hidden_states.transpose(-1, -2).reshape(batch_size, channel, height, width)
if attn.residual_connection:
hidden_states = hidden_states + residual
hidden_states = hidden_states / attn.rescale_output_factor
return hidden_states
class PAIntAAttnProcessor:
def __init__(self, transformer_block, mask, token_idx, do_classifier_free_guidance, scale_factors):
self.transformer_block = transformer_block # Stores the parent transformer block.
self.mask = mask
self.scale_factors = scale_factors
self.do_classifier_free_guidance = do_classifier_free_guidance
self.token_idx = token_idx
self.shape = mask.shape[2:]
self.mask_resoltuion = mask.shape[-1] * mask.shape[-2] # 64 x 64
self.default_processor = AttnProcessor()
def __call__(
self,
attn: Attention,
hidden_states: torch.Tensor,
encoder_hidden_states: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
temb: Optional[torch.Tensor] = None,
scale: float = 1.0,
) -> torch.Tensor:
# Automatically recognize the resolution of the current attention layer and resize the masks accordingly
downscale_factor = self.mask_resoltuion // hidden_states.shape[1]
mask = None
for factor in self.scale_factors:
if downscale_factor == factor**2:
shape = (self.shape[0] // factor, self.shape[1] // factor)
mask = F.interpolate(self.mask, shape, mode="bicubic") # B, 1, H, W
break
if mask is None:
return self.default_processor(attn, hidden_states, encoder_hidden_states, attention_mask, temb, scale)
# STARTS HERE
residual = hidden_states
# Save the input hidden_states for later use
input_hidden_states = hidden_states
# ================================================== #
# =============== SELF ATTENTION 1 ================= #
# ================================================== #
if attn.spatial_norm is not None:
hidden_states = attn.spatial_norm(hidden_states, temb)
input_ndim = hidden_states.ndim
if input_ndim == 4:
batch_size, channel, height, width = hidden_states.shape
hidden_states = hidden_states.view(batch_size, channel, height * width).transpose(1, 2)
batch_size, sequence_length, _ = (
hidden_states.shape if encoder_hidden_states is None else encoder_hidden_states.shape
)
attention_mask = attn.prepare_attention_mask(attention_mask, sequence_length, batch_size)
if attn.group_norm is not None:
hidden_states = attn.group_norm(hidden_states.transpose(1, 2)).transpose(1, 2)
query = attn.to_q(hidden_states)
if encoder_hidden_states is None:
encoder_hidden_states = hidden_states
elif attn.norm_cross:
encoder_hidden_states = attn.norm_encoder_hidden_states(encoder_hidden_states)
key = attn.to_k(encoder_hidden_states)
value = attn.to_v(encoder_hidden_states)
query = attn.head_to_batch_dim(query)
key = attn.head_to_batch_dim(key)
value = attn.head_to_batch_dim(value)
# self_attention_probs = attn.get_attention_scores(query, key, attention_mask) # We can't use post-softmax attention scores in this case
self_attention_scores = get_attention_scores(
attn, query, key, attention_mask
) # The custom function returns pre-softmax probabilities
self_attention_probs = self_attention_scores.softmax(
dim=-1
) # Manually compute the probabilities here, the scores will be reused in the second part of PAIntA
self_attention_probs = self_attention_probs.to(query.dtype)
hidden_states = torch.bmm(self_attention_probs, value)
hidden_states = attn.batch_to_head_dim(hidden_states)
# linear proj
hidden_states = attn.to_out[0](hidden_states)
# dropout
hidden_states = attn.to_out[1](hidden_states)
# x = x + self.attn1(self.norm1(x))
if input_ndim == 4:
hidden_states = hidden_states.transpose(-1, -2).reshape(batch_size, channel, height, width)
if attn.residual_connection: # So many residuals everywhere
hidden_states = hidden_states + residual
self_attention_output_hidden_states = hidden_states / attn.rescale_output_factor
# ================================================== #
# ============ BasicTransformerBlock =============== #
# ================================================== #
# We use a hack by running the code from the BasicTransformerBlock that is between Self and Cross attentions here
# The other option would've been modifying the BasicTransformerBlock and adding this functionality here.
# I assumed that changing the BasicTransformerBlock would have been a bigger deal and decided to use this hack isntead.
# The SelfAttention block recieves the normalized latents from the BasicTransformerBlock,
# But the residual of the output is the non-normalized version.
# Therefore we unnormalize the input hidden state here
unnormalized_input_hidden_states = (
input_hidden_states + self.transformer_block.norm1.bias
) * self.transformer_block.norm1.weight
# TODO: return if neccessary
# if self.use_ada_layer_norm_zero:
# attn_output = gate_msa.unsqueeze(1) * attn_output
# elif self.use_ada_layer_norm_single:
# attn_output = gate_msa * attn_output
transformer_hidden_states = self_attention_output_hidden_states + unnormalized_input_hidden_states
if transformer_hidden_states.ndim == 4:
transformer_hidden_states = transformer_hidden_states.squeeze(1)
# TODO: return if neccessary
# 2.5 GLIGEN Control
# if gligen_kwargs is not None:
# transformer_hidden_states = self.fuser(transformer_hidden_states, gligen_kwargs["objs"])
# NOTE: we experimented with using GLIGEN and HDPainter together, the results were not that great
# 3. Cross-Attention
if self.transformer_block.use_ada_layer_norm:
# transformer_norm_hidden_states = self.transformer_block.norm2(transformer_hidden_states, timestep)
raise NotImplementedError()
elif self.transformer_block.use_ada_layer_norm_zero or self.transformer_block.use_layer_norm:
transformer_norm_hidden_states = self.transformer_block.norm2(transformer_hidden_states)
elif self.transformer_block.use_ada_layer_norm_single:
# For PixArt norm2 isn't applied here:
# https://github.com/PixArt-alpha/PixArt-alpha/blob/0f55e922376d8b797edd44d25d0e7464b260dcab/diffusion/model/nets/PixArtMS.py#L70C1-L76C103
transformer_norm_hidden_states = transformer_hidden_states
elif self.transformer_block.use_ada_layer_norm_continuous:
# transformer_norm_hidden_states = self.transformer_block.norm2(transformer_hidden_states, added_cond_kwargs["pooled_text_emb"])
raise NotImplementedError()
else:
raise ValueError("Incorrect norm")
if self.transformer_block.pos_embed is not None and self.transformer_block.use_ada_layer_norm_single is False:
transformer_norm_hidden_states = self.transformer_block.pos_embed(transformer_norm_hidden_states)
# ================================================== #
# ================= CROSS ATTENTION ================ #
# ================================================== #
# We do an initial pass of the CrossAttention up to obtaining the similarity matrix here.
# The similarity matrix is used to obtain scaling coefficients for the attention matrix of the self attention
# We reuse the previously computed self-attention matrix, and only repeat the steps after the softmax
cross_attention_input_hidden_states = (
transformer_norm_hidden_states # Renaming the variable for the sake of readability
)
# TODO: check if classifier_free_guidance is being used before splitting here
if self.do_classifier_free_guidance:
# Our scaling coefficients depend only on the conditional part, so we split the inputs
(
_cross_attention_input_hidden_states_unconditional,
cross_attention_input_hidden_states_conditional,
) = cross_attention_input_hidden_states.chunk(2)
# Same split for the encoder_hidden_states i.e. the tokens
# Since the SelfAttention processors don't get the encoder states as input, we inject them into the processor in the begining.
_encoder_hidden_states_unconditional, encoder_hidden_states_conditional = self.encoder_hidden_states.chunk(
2
)
else:
cross_attention_input_hidden_states_conditional = cross_attention_input_hidden_states
encoder_hidden_states_conditional = self.encoder_hidden_states.chunk(2)
# Rename the variables for the sake of readability
# The part below is the beginning of the __call__ function of the following CrossAttention layer
cross_attention_hidden_states = cross_attention_input_hidden_states_conditional
cross_attention_encoder_hidden_states = encoder_hidden_states_conditional
attn2 = self.transformer_block.attn2
if attn2.spatial_norm is not None:
cross_attention_hidden_states = attn2.spatial_norm(cross_attention_hidden_states, temb)
input_ndim = cross_attention_hidden_states.ndim
if input_ndim == 4:
batch_size, channel, height, width = cross_attention_hidden_states.shape
cross_attention_hidden_states = cross_attention_hidden_states.view(
batch_size, channel, height * width
).transpose(1, 2)
(
batch_size,
sequence_length,
_,
) = cross_attention_hidden_states.shape # It is definitely a cross attention, so no need for an if block
# TODO: change the attention_mask here
attention_mask = attn2.prepare_attention_mask(
None, sequence_length, batch_size
) # I assume the attention mask is the same...
if attn2.group_norm is not None:
cross_attention_hidden_states = attn2.group_norm(cross_attention_hidden_states.transpose(1, 2)).transpose(
1, 2
)
query2 = attn2.to_q(cross_attention_hidden_states)
if attn2.norm_cross:
cross_attention_encoder_hidden_states = attn2.norm_encoder_hidden_states(
cross_attention_encoder_hidden_states
)
key2 = attn2.to_k(cross_attention_encoder_hidden_states)
query2 = attn2.head_to_batch_dim(query2)
key2 = attn2.head_to_batch_dim(key2)
cross_attention_probs = attn2.get_attention_scores(query2, key2, attention_mask)
# CrossAttention ends here, the remaining part is not used
# ================================================== #
# ================ SELF ATTENTION 2 ================ #
# ================================================== #
# DEJA VU!
mask = (mask > 0.5).to(self_attention_output_hidden_states.dtype)
m = mask.to(self_attention_output_hidden_states.device)
# m = rearrange(m, 'b c h w -> b (h w) c').contiguous()
m = m.permute(0, 2, 3, 1).reshape((m.shape[0], -1, m.shape[1])).contiguous() # B HW 1
m = torch.matmul(m, m.permute(0, 2, 1)) + (1 - m)
# # Compute scaling coefficients for the similarity matrix
# # Select the cross attention values for the correct tokens only!
# cross_attention_probs = cross_attention_probs.mean(dim = 0)
# cross_attention_probs = cross_attention_probs[:, self.token_idx].sum(dim=1)
# cross_attention_probs = cross_attention_probs.reshape(shape)
# gaussian_smoothing = GaussianSmoothing(channels=1, kernel_size=3, sigma=0.5, dim=2).to(self_attention_output_hidden_states.device)
# cross_attention_probs = gaussian_smoothing(cross_attention_probs.unsqueeze(0))[0] # optional smoothing
# cross_attention_probs = cross_attention_probs.reshape(-1)
# cross_attention_probs = ((cross_attention_probs - torch.median(cross_attention_probs.ravel())) / torch.max(cross_attention_probs.ravel())).clip(0, 1)
# c = (1 - m) * cross_attention_probs.reshape(1, 1, -1) + m # PAIntA scaling coefficients
# Compute scaling coefficients for the similarity matrix
# Select the cross attention values for the correct tokens only!
batch_size, dims, channels = cross_attention_probs.shape
batch_size = batch_size // attn.heads
cross_attention_probs = cross_attention_probs.reshape((batch_size, attn.heads, dims, channels)) # B, D, HW, T
cross_attention_probs = cross_attention_probs.mean(dim=1) # B, HW, T
cross_attention_probs = cross_attention_probs[..., self.token_idx].sum(dim=-1) # B, HW
cross_attention_probs = cross_attention_probs.reshape((batch_size,) + shape) # , B, H, W
gaussian_smoothing = GaussianSmoothing(channels=1, kernel_size=3, sigma=0.5, dim=2).to(
self_attention_output_hidden_states.device
)
cross_attention_probs = gaussian_smoothing(cross_attention_probs[:, None])[:, 0] # optional smoothing B, H, W
# Median normalization
cross_attention_probs = cross_attention_probs.reshape(batch_size, -1) # B, HW
cross_attention_probs = (
cross_attention_probs - cross_attention_probs.median(dim=-1, keepdim=True).values
) / cross_attention_probs.max(dim=-1, keepdim=True).values
cross_attention_probs = cross_attention_probs.clip(0, 1)
c = (1 - m) * cross_attention_probs.reshape(batch_size, 1, -1) + m
c = c.repeat_interleave(attn.heads, 0) # BD, HW
if self.do_classifier_free_guidance:
c = torch.cat([c, c]) # 2BD, HW
# Rescaling the original self-attention matrix
self_attention_scores_rescaled = self_attention_scores * c
self_attention_probs_rescaled = self_attention_scores_rescaled.softmax(dim=-1)
# Continuing the self attention normally using the new matrix
hidden_states = torch.bmm(self_attention_probs_rescaled, value)
hidden_states = attn.batch_to_head_dim(hidden_states)
# linear proj
hidden_states = attn.to_out[0](hidden_states)
# dropout
hidden_states = attn.to_out[1](hidden_states)
if input_ndim == 4:
hidden_states = hidden_states.transpose(-1, -2).reshape(batch_size, channel, height, width)
if attn.residual_connection:
hidden_states = hidden_states + input_hidden_states
hidden_states = hidden_states / attn.rescale_output_factor
return hidden_states
class StableDiffusionHDPainterPipeline(StableDiffusionInpaintPipeline):
def get_tokenized_prompt(self, prompt):
out = self.tokenizer(prompt)
return [self.tokenizer.decode(x) for x in out["input_ids"]]
def init_attn_processors(
self,
mask,
token_idx,
use_painta=True,
use_rasg=True,
painta_scale_factors=[2, 4], # 64x64 -> [16x16, 32x32]
rasg_scale_factor=4, # 64x64 -> 16x16
self_attention_layer_name="attn1",
cross_attention_layer_name="attn2",
list_of_painta_layer_names=None,
list_of_rasg_layer_names=None,
):
default_processor = AttnProcessor()
width, height = mask.shape[-2:]
width, height = width // self.vae_scale_factor, height // self.vae_scale_factor
painta_scale_factors = [x * self.vae_scale_factor for x in painta_scale_factors]
rasg_scale_factor = self.vae_scale_factor * rasg_scale_factor
attn_processors = {}
for x in self.unet.attn_processors:
if (list_of_painta_layer_names is None and self_attention_layer_name in x) or (
list_of_painta_layer_names is not None and x in list_of_painta_layer_names
):
if use_painta:
transformer_block = self.unet.get_submodule(x.replace(".attn1.processor", ""))
attn_processors[x] = PAIntAAttnProcessor(
transformer_block, mask, token_idx, self.do_classifier_free_guidance, painta_scale_factors
)
else:
attn_processors[x] = default_processor
elif (list_of_rasg_layer_names is None and cross_attention_layer_name in x) or (
list_of_rasg_layer_names is not None and x in list_of_rasg_layer_names
):
if use_rasg:
attn_processors[x] = RASGAttnProcessor(mask, token_idx, rasg_scale_factor)
else:
attn_processors[x] = default_processor
self.unet.set_attn_processor(attn_processors)
# import json
# with open('/home/hayk.manukyan/repos/diffusers/debug.txt', 'a') as f:
# json.dump({x:str(y) for x,y in self.unet.attn_processors.items()}, f, indent=4)
@torch.no_grad()
def __call__(
self,
prompt: Union[str, List[str]] = None,
image: PipelineImageInput = None,
mask_image: PipelineImageInput = None,
masked_image_latents: torch.Tensor = None,
height: Optional[int] = None,
width: Optional[int] = None,
padding_mask_crop: Optional[int] = None,
strength: float = 1.0,
num_inference_steps: int = 50,
timesteps: List[int] = None,
guidance_scale: float = 7.5,
positive_prompt: Optional[str] = "",
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.01,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.Tensor] = None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
ip_adapter_image: Optional[PipelineImageInput] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
clip_skip: int = None,
callback_on_step_end: Optional[Callable[[int, int, Dict], None]] = None,
callback_on_step_end_tensor_inputs: List[str] = ["latents"],
use_painta=True,
use_rasg=True,
self_attention_layer_name=".attn1",
cross_attention_layer_name=".attn2",
painta_scale_factors=[2, 4], # 16 x 16 and 32 x 32
rasg_scale_factor=4, # 16x16 by default
list_of_painta_layer_names=None,
list_of_rasg_layer_names=None,
**kwargs,
):
callback = kwargs.pop("callback", None)
callback_steps = kwargs.pop("callback_steps", None)
if callback is not None:
deprecate(
"callback",
"1.0.0",
"Passing `callback` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
if callback_steps is not None:
deprecate(
"callback_steps",
"1.0.0",
"Passing `callback_steps` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
# 0. Default height and width to unet
height = height or self.unet.config.sample_size * self.vae_scale_factor
width = width or self.unet.config.sample_size * self.vae_scale_factor
#
prompt_no_positives = prompt
if isinstance(prompt, list):
prompt = [x + positive_prompt for x in prompt]
else:
prompt = prompt + positive_prompt
# 1. Check inputs
self.check_inputs(
prompt,
image,
mask_image,
height,
width,
strength,
callback_steps,
negative_prompt,
prompt_embeds,
negative_prompt_embeds,
callback_on_step_end_tensor_inputs,
padding_mask_crop,
)
self._guidance_scale = guidance_scale
self._clip_skip = clip_skip
self._cross_attention_kwargs = cross_attention_kwargs
self._interrupt = False
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
# assert batch_size == 1, "Does not work with batch size > 1 currently"
device = self._execution_device
# 3. Encode input prompt
text_encoder_lora_scale = (
cross_attention_kwargs.get("scale", None) if cross_attention_kwargs is not None else None
)
prompt_embeds, negative_prompt_embeds = self.encode_prompt(
prompt,
device,
num_images_per_prompt,
self.do_classifier_free_guidance,
negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
lora_scale=text_encoder_lora_scale,
clip_skip=self.clip_skip,
)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
if self.do_classifier_free_guidance:
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds])
if ip_adapter_image is not None:
output_hidden_state = False if isinstance(self.unet.encoder_hid_proj, ImageProjection) else True
image_embeds, negative_image_embeds = self.encode_image(
ip_adapter_image, device, num_images_per_prompt, output_hidden_state
)
if self.do_classifier_free_guidance:
image_embeds = torch.cat([negative_image_embeds, image_embeds])
# 4. set timesteps
timesteps, num_inference_steps = retrieve_timesteps(self.scheduler, num_inference_steps, device, timesteps)
timesteps, num_inference_steps = self.get_timesteps(
num_inference_steps=num_inference_steps, strength=strength, device=device
)
# check that number of inference steps is not < 1 - as this doesn't make sense
if num_inference_steps < 1:
raise ValueError(
f"After adjusting the num_inference_steps by strength parameter: {strength}, the number of pipeline"
f"steps is {num_inference_steps} which is < 1 and not appropriate for this pipeline."
)
# at which timestep to set the initial noise (n.b. 50% if strength is 0.5)
latent_timestep = timesteps[:1].repeat(batch_size * num_images_per_prompt)
# create a boolean to check if the strength is set to 1. if so then initialise the latents with pure noise
is_strength_max = strength == 1.0
# 5. Preprocess mask and image
if padding_mask_crop is not None:
crops_coords = self.mask_processor.get_crop_region(mask_image, width, height, pad=padding_mask_crop)
resize_mode = "fill"
else:
crops_coords = None
resize_mode = "default"
original_image = image
init_image = self.image_processor.preprocess(
image, height=height, width=width, crops_coords=crops_coords, resize_mode=resize_mode
)
init_image = init_image.to(dtype=torch.float32)
# 6. Prepare latent variables
num_channels_latents = self.vae.config.latent_channels
num_channels_unet = self.unet.config.in_channels
return_image_latents = num_channels_unet == 4
latents_outputs = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
image=init_image,
timestep=latent_timestep,
is_strength_max=is_strength_max,
return_noise=True,
return_image_latents=return_image_latents,
)
if return_image_latents:
latents, noise, image_latents = latents_outputs
else:
latents, noise = latents_outputs
# 7. Prepare mask latent variables
mask_condition = self.mask_processor.preprocess(
mask_image, height=height, width=width, resize_mode=resize_mode, crops_coords=crops_coords
)
if masked_image_latents is None:
masked_image = init_image * (mask_condition < 0.5)
else:
masked_image = masked_image_latents
mask, masked_image_latents = self.prepare_mask_latents(
mask_condition,
masked_image,
batch_size * num_images_per_prompt,
height,
width,
prompt_embeds.dtype,
device,
generator,
self.do_classifier_free_guidance,
)
# 7.5 Setting up HD-Painter
# Get the indices of the tokens to be modified by both RASG and PAIntA
token_idx = list(range(1, self.get_tokenized_prompt(prompt_no_positives).index("<|endoftext|>"))) + [
self.get_tokenized_prompt(prompt).index("<|endoftext|>")
]
# Setting up the attention processors
self.init_attn_processors(
mask_condition,
token_idx,
use_painta,
use_rasg,
painta_scale_factors=painta_scale_factors,
rasg_scale_factor=rasg_scale_factor,
self_attention_layer_name=self_attention_layer_name,
cross_attention_layer_name=cross_attention_layer_name,
list_of_painta_layer_names=list_of_painta_layer_names,
list_of_rasg_layer_names=list_of_rasg_layer_names,
)
# 8. Check that sizes of mask, masked image and latents match
if num_channels_unet == 9:
# default case for runwayml/stable-diffusion-inpainting
num_channels_mask = mask.shape[1]
num_channels_masked_image = masked_image_latents.shape[1]
if num_channels_latents + num_channels_mask + num_channels_masked_image != self.unet.config.in_channels:
raise ValueError(
f"Incorrect configuration settings! The config of `pipeline.unet`: {self.unet.config} expects"
f" {self.unet.config.in_channels} but received `num_channels_latents`: {num_channels_latents} +"
f" `num_channels_mask`: {num_channels_mask} + `num_channels_masked_image`: {num_channels_masked_image}"
f" = {num_channels_latents+num_channels_masked_image+num_channels_mask}. Please verify the config of"
" `pipeline.unet` or your `mask_image` or `image` input."
)
elif num_channels_unet != 4:
raise ValueError(
f"The unet {self.unet.__class__} should have either 4 or 9 input channels, not {self.unet.config.in_channels}."
)
# 9. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
if use_rasg:
extra_step_kwargs["generator"] = None
# 9.1 Add image embeds for IP-Adapter
added_cond_kwargs = {"image_embeds": image_embeds} if ip_adapter_image is not None else None
# 9.2 Optionally get Guidance Scale Embedding
timestep_cond = None
if self.unet.config.time_cond_proj_dim is not None:
guidance_scale_tensor = torch.tensor(self.guidance_scale - 1).repeat(batch_size * num_images_per_prompt)
timestep_cond = self.get_guidance_scale_embedding(
guidance_scale_tensor, embedding_dim=self.unet.config.time_cond_proj_dim
).to(device=device, dtype=latents.dtype)
# 10. Denoising loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
self._num_timesteps = len(timesteps)
painta_active = True
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
if self.interrupt:
continue
if t < 500 and painta_active:
self.init_attn_processors(
mask_condition,
token_idx,
False,
use_rasg,
painta_scale_factors=painta_scale_factors,
rasg_scale_factor=rasg_scale_factor,
self_attention_layer_name=self_attention_layer_name,
cross_attention_layer_name=cross_attention_layer_name,
list_of_painta_layer_names=list_of_painta_layer_names,
list_of_rasg_layer_names=list_of_rasg_layer_names,
)
painta_active = False
with torch.enable_grad():
self.unet.zero_grad()
latents = latents.detach()
latents.requires_grad = True
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if self.do_classifier_free_guidance else latents
# concat latents, mask, masked_image_latents in the channel dimension
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
if num_channels_unet == 9:
latent_model_input = torch.cat([latent_model_input, mask, masked_image_latents], dim=1)
self.scheduler.latents = latents
self.encoder_hidden_states = prompt_embeds
for attn_processor in self.unet.attn_processors.values():
attn_processor.encoder_hidden_states = prompt_embeds
# predict the noise residual
noise_pred = self.unet(
latent_model_input,
t,
encoder_hidden_states=prompt_embeds,
timestep_cond=timestep_cond,
cross_attention_kwargs=self.cross_attention_kwargs,
added_cond_kwargs=added_cond_kwargs,
return_dict=False,
)[0]
# perform guidance
if self.do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + self.guidance_scale * (noise_pred_text - noise_pred_uncond)
if use_rasg:
# Perform RASG
_, _, height, width = mask_condition.shape # 512 x 512
scale_factor = self.vae_scale_factor * rasg_scale_factor # 8 * 4 = 32
# TODO: Fix for > 1 batch_size
rasg_mask = F.interpolate(
mask_condition, (height // scale_factor, width // scale_factor), mode="bicubic"
)[0, 0] # mode is nearest by default, B, H, W
# Aggregate the saved attention maps
attn_map = []
for processor in self.unet.attn_processors.values():
if hasattr(processor, "attention_scores") and processor.attention_scores is not None:
if self.do_classifier_free_guidance:
attn_map.append(processor.attention_scores.chunk(2)[1]) # (B/2) x H, 256, 77
else:
attn_map.append(processor.attention_scores) # B x H, 256, 77 ?
attn_map = (
torch.cat(attn_map)
.mean(0)
.permute(1, 0)
.reshape((-1, height // scale_factor, width // scale_factor))
) # 77, 16, 16
# Compute the attention score
attn_score = -sum(
[
F.binary_cross_entropy_with_logits(x - 1.0, rasg_mask.to(device))
for x in attn_map[token_idx]
]
)
# Backward the score and compute the gradients
attn_score.backward()
# Normalzie the gradients and compute the noise component
variance_noise = latents.grad.detach()
# print("VARIANCE SHAPE", variance_noise.shape)
variance_noise -= torch.mean(variance_noise, [1, 2, 3], keepdim=True)
variance_noise /= torch.std(variance_noise, [1, 2, 3], keepdim=True)
else:
variance_noise = None
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(
noise_pred, t, latents, **extra_step_kwargs, return_dict=False, variance_noise=variance_noise
)[0]
if num_channels_unet == 4:
init_latents_proper = image_latents
if self.do_classifier_free_guidance:
init_mask, _ = mask.chunk(2)
else:
init_mask = mask
if i < len(timesteps) - 1:
noise_timestep = timesteps[i + 1]
init_latents_proper = self.scheduler.add_noise(
init_latents_proper, noise, torch.tensor([noise_timestep])
)
latents = (1 - init_mask) * init_latents_proper + init_mask * latents
if callback_on_step_end is not None:
callback_kwargs = {}
for k in callback_on_step_end_tensor_inputs:
callback_kwargs[k] = locals()[k]
callback_outputs = callback_on_step_end(self, i, t, callback_kwargs)
latents = callback_outputs.pop("latents", latents)
prompt_embeds = callback_outputs.pop("prompt_embeds", prompt_embeds)
negative_prompt_embeds = callback_outputs.pop("negative_prompt_embeds", negative_prompt_embeds)
mask = callback_outputs.pop("mask", mask)
masked_image_latents = callback_outputs.pop("masked_image_latents", masked_image_latents)
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if not output_type == "latent":
condition_kwargs = {}
if isinstance(self.vae, AsymmetricAutoencoderKL):
init_image = init_image.to(device=device, dtype=masked_image_latents.dtype)
init_image_condition = init_image.clone()
init_image = self._encode_vae_image(init_image, generator=generator)
mask_condition = mask_condition.to(device=device, dtype=masked_image_latents.dtype)
condition_kwargs = {"image": init_image_condition, "mask": mask_condition}
image = self.vae.decode(
latents / self.vae.config.scaling_factor, return_dict=False, generator=generator, **condition_kwargs
)[0]
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
else:
image = latents
has_nsfw_concept = None
if has_nsfw_concept is None:
do_denormalize = [True] * image.shape[0]
else:
do_denormalize = [not has_nsfw for has_nsfw in has_nsfw_concept]
image = self.image_processor.postprocess(image, output_type=output_type, do_denormalize=do_denormalize)
if padding_mask_crop is not None:
image = [self.image_processor.apply_overlay(mask_image, original_image, i, crops_coords) for i in image]
# Offload all models
self.maybe_free_model_hooks()
if not return_dict:
return (image, has_nsfw_concept)
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
# ============= Utility Functions ============== #
class GaussianSmoothing(nn.Module):
"""
Apply gaussian smoothing on a
1d, 2d or 3d tensor. Filtering is performed seperately for each channel
in the input using a depthwise convolution.
Args:
channels (`int` or `sequence`):
Number of channels of the input tensors. The output will have this number of channels as well.
kernel_size (`int` or `sequence`):
Size of the Gaussian kernel.
sigma (`float` or `sequence`):
Standard deviation of the Gaussian kernel.
dim (`int`, *optional*, defaults to `2`):
The number of dimensions of the data. Default is 2 (spatial dimensions).
"""
def __init__(self, channels, kernel_size, sigma, dim=2):
super(GaussianSmoothing, self).__init__()
if isinstance(kernel_size, numbers.Number):
kernel_size = [kernel_size] * dim
if isinstance(sigma, numbers.Number):
sigma = [sigma] * dim
# The gaussian kernel is the product of the
# gaussian function of each dimension.
kernel = 1
meshgrids = torch.meshgrid([torch.arange(size, dtype=torch.float32) for size in kernel_size])
for size, std, mgrid in zip(kernel_size, sigma, meshgrids):
mean = (size - 1) / 2
kernel *= 1 / (std * math.sqrt(2 * math.pi)) * torch.exp(-(((mgrid - mean) / (2 * std)) ** 2))
# Make sure sum of values in gaussian kernel equals 1.
kernel = kernel / torch.sum(kernel)
# Reshape to depthwise convolutional weight
kernel = kernel.view(1, 1, *kernel.size())
kernel = kernel.repeat(channels, *[1] * (kernel.dim() - 1))
self.register_buffer("weight", kernel)
self.groups = channels
if dim == 1:
self.conv = F.conv1d
elif dim == 2:
self.conv = F.conv2d
elif dim == 3:
self.conv = F.conv3d
else:
raise RuntimeError("Only 1, 2 and 3 dimensions are supported. Received {}.".format(dim))
def forward(self, input):
"""
Apply gaussian filter to input.
Args:
input (`torch.Tensor` of shape `(N, C, H, W)`):
Input to apply Gaussian filter on.
Returns:
`torch.Tensor`:
The filtered output tensor with the same shape as the input.
"""
return self.conv(input, weight=self.weight.to(input.dtype), groups=self.groups, padding="same")
def get_attention_scores(
self, query: torch.Tensor, key: torch.Tensor, attention_mask: torch.Tensor = None
) -> torch.Tensor:
r"""
Compute the attention scores.
Args:
query (`torch.Tensor`): The query tensor.
key (`torch.Tensor`): The key tensor.
attention_mask (`torch.Tensor`, *optional*): The attention mask to use. If `None`, no mask is applied.
Returns:
`torch.Tensor`: The attention probabilities/scores.
"""
if self.upcast_attention:
query = query.float()
key = key.float()
if attention_mask is None:
baddbmm_input = torch.empty(
query.shape[0], query.shape[1], key.shape[1], dtype=query.dtype, device=query.device
)
beta = 0
else:
baddbmm_input = attention_mask
beta = 1
attention_scores = torch.baddbmm(
baddbmm_input,
query,
key.transpose(-1, -2),
beta=beta,
alpha=self.scale,
)
del baddbmm_input
if self.upcast_softmax:
attention_scores = attention_scores.float()
return attention_scores
| diffusers/examples/community/hd_painter.py/0 | {
"file_path": "diffusers/examples/community/hd_painter.py",
"repo_id": "diffusers",
"token_count": 20682
} |
# Copyright 2024 Bingxin Ke, ETH Zurich and The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# --------------------------------------------------------------------------
# If you find this code useful, we kindly ask you to cite our paper in your work.
# Please find bibtex at: https://github.com/prs-eth/Marigold#-citation
# More information about the method can be found at https://marigoldmonodepth.github.io
# --------------------------------------------------------------------------
import logging
import math
from typing import Dict, Union
import matplotlib
import numpy as np
import torch
from PIL import Image
from PIL.Image import Resampling
from scipy.optimize import minimize
from torch.utils.data import DataLoader, TensorDataset
from tqdm.auto import tqdm
from transformers import CLIPTextModel, CLIPTokenizer
from diffusers import (
AutoencoderKL,
DDIMScheduler,
DiffusionPipeline,
LCMScheduler,
UNet2DConditionModel,
)
from diffusers.utils import BaseOutput, check_min_version
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
check_min_version("0.33.0.dev0")
class MarigoldDepthOutput(BaseOutput):
"""
Output class for Marigold monocular depth prediction pipeline.
Args:
depth_np (`np.ndarray`):
Predicted depth map, with depth values in the range of [0, 1].
depth_colored (`None` or `PIL.Image.Image`):
Colorized depth map, with the shape of [3, H, W] and values in [0, 1].
uncertainty (`None` or `np.ndarray`):
Uncalibrated uncertainty(MAD, median absolute deviation) coming from ensembling.
"""
depth_np: np.ndarray
depth_colored: Union[None, Image.Image]
uncertainty: Union[None, np.ndarray]
def get_pil_resample_method(method_str: str) -> Resampling:
resample_method_dic = {
"bilinear": Resampling.BILINEAR,
"bicubic": Resampling.BICUBIC,
"nearest": Resampling.NEAREST,
}
resample_method = resample_method_dic.get(method_str, None)
if resample_method is None:
raise ValueError(f"Unknown resampling method: {resample_method}")
else:
return resample_method
class MarigoldPipeline(DiffusionPipeline):
"""
Pipeline for monocular depth estimation using Marigold: https://marigoldmonodepth.github.io.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
Args:
unet (`UNet2DConditionModel`):
Conditional U-Net to denoise the depth latent, conditioned on image latent.
vae (`AutoencoderKL`):
Variational Auto-Encoder (VAE) Model to encode and decode images and depth maps
to and from latent representations.
scheduler (`DDIMScheduler`):
A scheduler to be used in combination with `unet` to denoise the encoded image latents.
text_encoder (`CLIPTextModel`):
Text-encoder, for empty text embedding.
tokenizer (`CLIPTokenizer`):
CLIP tokenizer.
"""
rgb_latent_scale_factor = 0.18215
depth_latent_scale_factor = 0.18215
def __init__(
self,
unet: UNet2DConditionModel,
vae: AutoencoderKL,
scheduler: DDIMScheduler,
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
):
super().__init__()
self.register_modules(
unet=unet,
vae=vae,
scheduler=scheduler,
text_encoder=text_encoder,
tokenizer=tokenizer,
)
self.empty_text_embed = None
@torch.no_grad()
def __call__(
self,
input_image: Image,
denoising_steps: int = 10,
ensemble_size: int = 10,
processing_res: int = 768,
match_input_res: bool = True,
resample_method: str = "bilinear",
batch_size: int = 0,
seed: Union[int, None] = None,
color_map: str = "Spectral",
show_progress_bar: bool = True,
ensemble_kwargs: Dict = None,
) -> MarigoldDepthOutput:
"""
Function invoked when calling the pipeline.
Args:
input_image (`Image`):
Input RGB (or gray-scale) image.
processing_res (`int`, *optional*, defaults to `768`):
Maximum resolution of processing.
If set to 0: will not resize at all.
match_input_res (`bool`, *optional*, defaults to `True`):
Resize depth prediction to match input resolution.
Only valid if `processing_res` > 0.
resample_method: (`str`, *optional*, defaults to `bilinear`):
Resampling method used to resize images and depth predictions. This can be one of `bilinear`, `bicubic` or `nearest`, defaults to: `bilinear`.
denoising_steps (`int`, *optional*, defaults to `10`):
Number of diffusion denoising steps (DDIM) during inference.
ensemble_size (`int`, *optional*, defaults to `10`):
Number of predictions to be ensembled.
batch_size (`int`, *optional*, defaults to `0`):
Inference batch size, no bigger than `num_ensemble`.
If set to 0, the script will automatically decide the proper batch size.
seed (`int`, *optional*, defaults to `None`)
Reproducibility seed.
show_progress_bar (`bool`, *optional*, defaults to `True`):
Display a progress bar of diffusion denoising.
color_map (`str`, *optional*, defaults to `"Spectral"`, pass `None` to skip colorized depth map generation):
Colormap used to colorize the depth map.
ensemble_kwargs (`dict`, *optional*, defaults to `None`):
Arguments for detailed ensembling settings.
Returns:
`MarigoldDepthOutput`: Output class for Marigold monocular depth prediction pipeline, including:
- **depth_np** (`np.ndarray`) Predicted depth map, with depth values in the range of [0, 1]
- **depth_colored** (`PIL.Image.Image`) Colorized depth map, with the shape of [3, H, W] and values in [0, 1], None if `color_map` is `None`
- **uncertainty** (`None` or `np.ndarray`) Uncalibrated uncertainty(MAD, median absolute deviation)
coming from ensembling. None if `ensemble_size = 1`
"""
device = self.device
input_size = input_image.size
if not match_input_res:
assert processing_res is not None, "Value error: `resize_output_back` is only valid with "
assert processing_res >= 0
assert ensemble_size >= 1
# Check if denoising step is reasonable
self._check_inference_step(denoising_steps)
resample_method: Resampling = get_pil_resample_method(resample_method)
# ----------------- Image Preprocess -----------------
# Resize image
if processing_res > 0:
input_image = self.resize_max_res(
input_image,
max_edge_resolution=processing_res,
resample_method=resample_method,
)
# Convert the image to RGB, to 1.remove the alpha channel 2.convert B&W to 3-channel
input_image = input_image.convert("RGB")
image = np.asarray(input_image)
# Normalize rgb values
rgb = np.transpose(image, (2, 0, 1)) # [H, W, rgb] -> [rgb, H, W]
rgb_norm = rgb / 255.0 * 2.0 - 1.0 # [0, 255] -> [-1, 1]
rgb_norm = torch.from_numpy(rgb_norm).to(self.dtype)
rgb_norm = rgb_norm.to(device)
assert rgb_norm.min() >= -1.0 and rgb_norm.max() <= 1.0
# ----------------- Predicting depth -----------------
# Batch repeated input image
duplicated_rgb = torch.stack([rgb_norm] * ensemble_size)
single_rgb_dataset = TensorDataset(duplicated_rgb)
if batch_size > 0:
_bs = batch_size
else:
_bs = self._find_batch_size(
ensemble_size=ensemble_size,
input_res=max(rgb_norm.shape[1:]),
dtype=self.dtype,
)
single_rgb_loader = DataLoader(single_rgb_dataset, batch_size=_bs, shuffle=False)
# Predict depth maps (batched)
depth_pred_ls = []
if show_progress_bar:
iterable = tqdm(single_rgb_loader, desc=" " * 2 + "Inference batches", leave=False)
else:
iterable = single_rgb_loader
for batch in iterable:
(batched_img,) = batch
depth_pred_raw = self.single_infer(
rgb_in=batched_img,
num_inference_steps=denoising_steps,
show_pbar=show_progress_bar,
seed=seed,
)
depth_pred_ls.append(depth_pred_raw.detach())
depth_preds = torch.concat(depth_pred_ls, dim=0).squeeze()
torch.cuda.empty_cache() # clear vram cache for ensembling
# ----------------- Test-time ensembling -----------------
if ensemble_size > 1:
depth_pred, pred_uncert = self.ensemble_depths(depth_preds, **(ensemble_kwargs or {}))
else:
depth_pred = depth_preds
pred_uncert = None
# ----------------- Post processing -----------------
# Scale prediction to [0, 1]
min_d = torch.min(depth_pred)
max_d = torch.max(depth_pred)
depth_pred = (depth_pred - min_d) / (max_d - min_d)
# Convert to numpy
depth_pred = depth_pred.cpu().numpy().astype(np.float32)
# Resize back to original resolution
if match_input_res:
pred_img = Image.fromarray(depth_pred)
pred_img = pred_img.resize(input_size, resample=resample_method)
depth_pred = np.asarray(pred_img)
# Clip output range
depth_pred = depth_pred.clip(0, 1)
# Colorize
if color_map is not None:
depth_colored = self.colorize_depth_maps(
depth_pred, 0, 1, cmap=color_map
).squeeze() # [3, H, W], value in (0, 1)
depth_colored = (depth_colored * 255).astype(np.uint8)
depth_colored_hwc = self.chw2hwc(depth_colored)
depth_colored_img = Image.fromarray(depth_colored_hwc)
else:
depth_colored_img = None
return MarigoldDepthOutput(
depth_np=depth_pred,
depth_colored=depth_colored_img,
uncertainty=pred_uncert,
)
def _check_inference_step(self, n_step: int):
"""
Check if denoising step is reasonable
Args:
n_step (`int`): denoising steps
"""
assert n_step >= 1
if isinstance(self.scheduler, DDIMScheduler):
if n_step < 10:
logging.warning(
f"Too few denoising steps: {n_step}. Recommended to use the LCM checkpoint for few-step inference."
)
elif isinstance(self.scheduler, LCMScheduler):
if not 1 <= n_step <= 4:
logging.warning(f"Non-optimal setting of denoising steps: {n_step}. Recommended setting is 1-4 steps.")
else:
raise RuntimeError(f"Unsupported scheduler type: {type(self.scheduler)}")
def _encode_empty_text(self):
"""
Encode text embedding for empty prompt.
"""
prompt = ""
text_inputs = self.tokenizer(
prompt,
padding="do_not_pad",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids.to(self.text_encoder.device)
self.empty_text_embed = self.text_encoder(text_input_ids)[0].to(self.dtype)
@torch.no_grad()
def single_infer(
self,
rgb_in: torch.Tensor,
num_inference_steps: int,
seed: Union[int, None],
show_pbar: bool,
) -> torch.Tensor:
"""
Perform an individual depth prediction without ensembling.
Args:
rgb_in (`torch.Tensor`):
Input RGB image.
num_inference_steps (`int`):
Number of diffusion denoisign steps (DDIM) during inference.
show_pbar (`bool`):
Display a progress bar of diffusion denoising.
Returns:
`torch.Tensor`: Predicted depth map.
"""
device = rgb_in.device
# Set timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps # [T]
# Encode image
rgb_latent = self.encode_rgb(rgb_in)
# Initial depth map (noise)
if seed is None:
rand_num_generator = None
else:
rand_num_generator = torch.Generator(device=device)
rand_num_generator.manual_seed(seed)
depth_latent = torch.randn(
rgb_latent.shape,
device=device,
dtype=self.dtype,
generator=rand_num_generator,
) # [B, 4, h, w]
# Batched empty text embedding
if self.empty_text_embed is None:
self._encode_empty_text()
batch_empty_text_embed = self.empty_text_embed.repeat((rgb_latent.shape[0], 1, 1)) # [B, 2, 1024]
# Denoising loop
if show_pbar:
iterable = tqdm(
enumerate(timesteps),
total=len(timesteps),
leave=False,
desc=" " * 4 + "Diffusion denoising",
)
else:
iterable = enumerate(timesteps)
for i, t in iterable:
unet_input = torch.cat([rgb_latent, depth_latent], dim=1) # this order is important
# predict the noise residual
noise_pred = self.unet(unet_input, t, encoder_hidden_states=batch_empty_text_embed).sample # [B, 4, h, w]
# compute the previous noisy sample x_t -> x_t-1
depth_latent = self.scheduler.step(noise_pred, t, depth_latent, generator=rand_num_generator).prev_sample
depth = self.decode_depth(depth_latent)
# clip prediction
depth = torch.clip(depth, -1.0, 1.0)
# shift to [0, 1]
depth = (depth + 1.0) / 2.0
return depth
def encode_rgb(self, rgb_in: torch.Tensor) -> torch.Tensor:
"""
Encode RGB image into latent.
Args:
rgb_in (`torch.Tensor`):
Input RGB image to be encoded.
Returns:
`torch.Tensor`: Image latent.
"""
# encode
h = self.vae.encoder(rgb_in)
moments = self.vae.quant_conv(h)
mean, logvar = torch.chunk(moments, 2, dim=1)
# scale latent
rgb_latent = mean * self.rgb_latent_scale_factor
return rgb_latent
def decode_depth(self, depth_latent: torch.Tensor) -> torch.Tensor:
"""
Decode depth latent into depth map.
Args:
depth_latent (`torch.Tensor`):
Depth latent to be decoded.
Returns:
`torch.Tensor`: Decoded depth map.
"""
# scale latent
depth_latent = depth_latent / self.depth_latent_scale_factor
# decode
z = self.vae.post_quant_conv(depth_latent)
stacked = self.vae.decoder(z)
# mean of output channels
depth_mean = stacked.mean(dim=1, keepdim=True)
return depth_mean
@staticmethod
def resize_max_res(img: Image.Image, max_edge_resolution: int, resample_method=Resampling.BILINEAR) -> Image.Image:
"""
Resize image to limit maximum edge length while keeping aspect ratio.
Args:
img (`Image.Image`):
Image to be resized.
max_edge_resolution (`int`):
Maximum edge length (pixel).
resample_method (`PIL.Image.Resampling`):
Resampling method used to resize images.
Returns:
`Image.Image`: Resized image.
"""
original_width, original_height = img.size
downscale_factor = min(max_edge_resolution / original_width, max_edge_resolution / original_height)
new_width = int(original_width * downscale_factor)
new_height = int(original_height * downscale_factor)
resized_img = img.resize((new_width, new_height), resample=resample_method)
return resized_img
@staticmethod
def colorize_depth_maps(depth_map, min_depth, max_depth, cmap="Spectral", valid_mask=None):
"""
Colorize depth maps.
"""
assert len(depth_map.shape) >= 2, "Invalid dimension"
if isinstance(depth_map, torch.Tensor):
depth = depth_map.detach().clone().squeeze().numpy()
elif isinstance(depth_map, np.ndarray):
depth = depth_map.copy().squeeze()
# reshape to [ (B,) H, W ]
if depth.ndim < 3:
depth = depth[np.newaxis, :, :]
# colorize
cm = matplotlib.colormaps[cmap]
depth = ((depth - min_depth) / (max_depth - min_depth)).clip(0, 1)
img_colored_np = cm(depth, bytes=False)[:, :, :, 0:3] # value from 0 to 1
img_colored_np = np.rollaxis(img_colored_np, 3, 1)
if valid_mask is not None:
if isinstance(depth_map, torch.Tensor):
valid_mask = valid_mask.detach().numpy()
valid_mask = valid_mask.squeeze() # [H, W] or [B, H, W]
if valid_mask.ndim < 3:
valid_mask = valid_mask[np.newaxis, np.newaxis, :, :]
else:
valid_mask = valid_mask[:, np.newaxis, :, :]
valid_mask = np.repeat(valid_mask, 3, axis=1)
img_colored_np[~valid_mask] = 0
if isinstance(depth_map, torch.Tensor):
img_colored = torch.from_numpy(img_colored_np).float()
elif isinstance(depth_map, np.ndarray):
img_colored = img_colored_np
return img_colored
@staticmethod
def chw2hwc(chw):
assert 3 == len(chw.shape)
if isinstance(chw, torch.Tensor):
hwc = torch.permute(chw, (1, 2, 0))
elif isinstance(chw, np.ndarray):
hwc = np.moveaxis(chw, 0, -1)
return hwc
@staticmethod
def _find_batch_size(ensemble_size: int, input_res: int, dtype: torch.dtype) -> int:
"""
Automatically search for suitable operating batch size.
Args:
ensemble_size (`int`):
Number of predictions to be ensembled.
input_res (`int`):
Operating resolution of the input image.
Returns:
`int`: Operating batch size.
"""
# Search table for suggested max. inference batch size
bs_search_table = [
# tested on A100-PCIE-80GB
{"res": 768, "total_vram": 79, "bs": 35, "dtype": torch.float32},
{"res": 1024, "total_vram": 79, "bs": 20, "dtype": torch.float32},
# tested on A100-PCIE-40GB
{"res": 768, "total_vram": 39, "bs": 15, "dtype": torch.float32},
{"res": 1024, "total_vram": 39, "bs": 8, "dtype": torch.float32},
{"res": 768, "total_vram": 39, "bs": 30, "dtype": torch.float16},
{"res": 1024, "total_vram": 39, "bs": 15, "dtype": torch.float16},
# tested on RTX3090, RTX4090
{"res": 512, "total_vram": 23, "bs": 20, "dtype": torch.float32},
{"res": 768, "total_vram": 23, "bs": 7, "dtype": torch.float32},
{"res": 1024, "total_vram": 23, "bs": 3, "dtype": torch.float32},
{"res": 512, "total_vram": 23, "bs": 40, "dtype": torch.float16},
{"res": 768, "total_vram": 23, "bs": 18, "dtype": torch.float16},
{"res": 1024, "total_vram": 23, "bs": 10, "dtype": torch.float16},
# tested on GTX1080Ti
{"res": 512, "total_vram": 10, "bs": 5, "dtype": torch.float32},
{"res": 768, "total_vram": 10, "bs": 2, "dtype": torch.float32},
{"res": 512, "total_vram": 10, "bs": 10, "dtype": torch.float16},
{"res": 768, "total_vram": 10, "bs": 5, "dtype": torch.float16},
{"res": 1024, "total_vram": 10, "bs": 3, "dtype": torch.float16},
]
if not torch.cuda.is_available():
return 1
total_vram = torch.cuda.mem_get_info()[1] / 1024.0**3
filtered_bs_search_table = [s for s in bs_search_table if s["dtype"] == dtype]
for settings in sorted(
filtered_bs_search_table,
key=lambda k: (k["res"], -k["total_vram"]),
):
if input_res <= settings["res"] and total_vram >= settings["total_vram"]:
bs = settings["bs"]
if bs > ensemble_size:
bs = ensemble_size
elif bs > math.ceil(ensemble_size / 2) and bs < ensemble_size:
bs = math.ceil(ensemble_size / 2)
return bs
return 1
@staticmethod
def ensemble_depths(
input_images: torch.Tensor,
regularizer_strength: float = 0.02,
max_iter: int = 2,
tol: float = 1e-3,
reduction: str = "median",
max_res: int = None,
):
"""
To ensemble multiple affine-invariant depth images (up to scale and shift),
by aligning estimating the scale and shift
"""
def inter_distances(tensors: torch.Tensor):
"""
To calculate the distance between each two depth maps.
"""
distances = []
for i, j in torch.combinations(torch.arange(tensors.shape[0])):
arr1 = tensors[i : i + 1]
arr2 = tensors[j : j + 1]
distances.append(arr1 - arr2)
dist = torch.concatenate(distances, dim=0)
return dist
device = input_images.device
dtype = input_images.dtype
np_dtype = np.float32
original_input = input_images.clone()
n_img = input_images.shape[0]
ori_shape = input_images.shape
if max_res is not None:
scale_factor = torch.min(max_res / torch.tensor(ori_shape[-2:]))
if scale_factor < 1:
downscaler = torch.nn.Upsample(scale_factor=scale_factor, mode="nearest")
input_images = downscaler(torch.from_numpy(input_images)).numpy()
# init guess
_min = np.min(input_images.reshape((n_img, -1)).cpu().numpy(), axis=1)
_max = np.max(input_images.reshape((n_img, -1)).cpu().numpy(), axis=1)
s_init = 1.0 / (_max - _min).reshape((-1, 1, 1))
t_init = (-1 * s_init.flatten() * _min.flatten()).reshape((-1, 1, 1))
x = np.concatenate([s_init, t_init]).reshape(-1).astype(np_dtype)
input_images = input_images.to(device)
# objective function
def closure(x):
l = len(x)
s = x[: int(l / 2)]
t = x[int(l / 2) :]
s = torch.from_numpy(s).to(dtype=dtype).to(device)
t = torch.from_numpy(t).to(dtype=dtype).to(device)
transformed_arrays = input_images * s.view((-1, 1, 1)) + t.view((-1, 1, 1))
dists = inter_distances(transformed_arrays)
sqrt_dist = torch.sqrt(torch.mean(dists**2))
if "mean" == reduction:
pred = torch.mean(transformed_arrays, dim=0)
elif "median" == reduction:
pred = torch.median(transformed_arrays, dim=0).values
else:
raise ValueError
near_err = torch.sqrt((0 - torch.min(pred)) ** 2)
far_err = torch.sqrt((1 - torch.max(pred)) ** 2)
err = sqrt_dist + (near_err + far_err) * regularizer_strength
err = err.detach().cpu().numpy().astype(np_dtype)
return err
res = minimize(
closure,
x,
method="BFGS",
tol=tol,
options={"maxiter": max_iter, "disp": False},
)
x = res.x
l = len(x)
s = x[: int(l / 2)]
t = x[int(l / 2) :]
# Prediction
s = torch.from_numpy(s).to(dtype=dtype).to(device)
t = torch.from_numpy(t).to(dtype=dtype).to(device)
transformed_arrays = original_input * s.view(-1, 1, 1) + t.view(-1, 1, 1)
if "mean" == reduction:
aligned_images = torch.mean(transformed_arrays, dim=0)
std = torch.std(transformed_arrays, dim=0)
uncertainty = std
elif "median" == reduction:
aligned_images = torch.median(transformed_arrays, dim=0).values
# MAD (median absolute deviation) as uncertainty indicator
abs_dev = torch.abs(transformed_arrays - aligned_images)
mad = torch.median(abs_dev, dim=0).values
uncertainty = mad
else:
raise ValueError(f"Unknown reduction method: {reduction}")
# Scale and shift to [0, 1]
_min = torch.min(aligned_images)
_max = torch.max(aligned_images)
aligned_images = (aligned_images - _min) / (_max - _min)
uncertainty /= _max - _min
return aligned_images, uncertainty
| diffusers/examples/community/marigold_depth_estimation.py/0 | {
"file_path": "diffusers/examples/community/marigold_depth_estimation.py",
"repo_id": "diffusers",
"token_count": 12108
} |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
from typing import Any, Callable, Dict, List, Optional, Tuple, Union
import intel_extension_for_pytorch as ipex
import torch
from transformers import (
CLIPImageProcessor,
CLIPTextModel,
CLIPTextModelWithProjection,
CLIPTokenizer,
CLIPVisionModelWithProjection,
)
from diffusers import StableDiffusionXLPipeline
from diffusers.image_processor import PipelineImageInput, VaeImageProcessor
from diffusers.loaders import (
StableDiffusionXLLoraLoaderMixin,
TextualInversionLoaderMixin,
)
from diffusers.models import AutoencoderKL, UNet2DConditionModel
from diffusers.models.attention_processor import (
AttnProcessor2_0,
XFormersAttnProcessor,
)
from diffusers.models.lora import adjust_lora_scale_text_encoder
from diffusers.pipelines.stable_diffusion_xl import StableDiffusionXLPipelineOutput
from diffusers.schedulers import KarrasDiffusionSchedulers
from diffusers.utils import (
USE_PEFT_BACKEND,
deprecate,
is_invisible_watermark_available,
is_torch_xla_available,
logging,
replace_example_docstring,
scale_lora_layers,
unscale_lora_layers,
)
from diffusers.utils.torch_utils import randn_tensor
if is_invisible_watermark_available():
from diffusers.pipelines.stable_diffusion_xl.watermark import StableDiffusionXLWatermarker
if is_torch_xla_available():
import torch_xla.core.xla_model as xm
XLA_AVAILABLE = True
else:
XLA_AVAILABLE = False
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import torch
>>> from diffusers import StableDiffusionXLPipelineIpex
>>> # SDXL-Turbo, a distilled version of SDXL 1.0, trained for real-time synthesis
>>> pipe = StableDiffusionXLPipelineIpex.from_pretrained(
... "stabilityai/sdxl-turbo", low_cpu_mem_usage=True, use_safetensors=True
... )
>>> num_inference_steps = 1
>>> guidance_scale = 0.0
>>> use_bf16 = True
>>> data_type = torch.bfloat16 if use_bf16 else torch.float32
>>> prompt = "a photo of an astronaut riding a horse on mars"
>>> # value of image height/width should be consistent with the pipeline inference
>>> # For Float32
>>> pipe.prepare_for_ipex(torch.float32, prompt, height=512, width=512)
>>> # For BFloat16
>>> pipe.prepare_for_ipex(torch.bfloat16, prompt, height=512, width=512)
>>> # value of image height/width should be consistent with 'prepare_for_ipex()'
>>> # For Float32
>>> image = pipe(prompt, num_inference_steps=num_inference_steps, height=512, width=512, guidance_scale=guidance_scale).images[0]
>>> # For BFloat16
>>> with torch.cpu.amp.autocast(enabled=True, dtype=torch.bfloat16):
>>> image = pipe(prompt, num_inference_steps=num_inference_steps, height=512, width=512, guidance_scale=guidance_scale).images[0]
```
"""
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.rescale_noise_cfg
def rescale_noise_cfg(noise_cfg, noise_pred_text, guidance_rescale=0.0):
"""
Rescale `noise_cfg` according to `guidance_rescale`. Based on findings of [Common Diffusion Noise Schedules and
Sample Steps are Flawed](https://arxiv.org/pdf/2305.08891.pdf). See Section 3.4
"""
std_text = noise_pred_text.std(dim=list(range(1, noise_pred_text.ndim)), keepdim=True)
std_cfg = noise_cfg.std(dim=list(range(1, noise_cfg.ndim)), keepdim=True)
# rescale the results from guidance (fixes overexposure)
noise_pred_rescaled = noise_cfg * (std_text / std_cfg)
# mix with the original results from guidance by factor guidance_rescale to avoid "plain looking" images
noise_cfg = guidance_rescale * noise_pred_rescaled + (1 - guidance_rescale) * noise_cfg
return noise_cfg
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.retrieve_timesteps
def retrieve_timesteps(
scheduler,
num_inference_steps: Optional[int] = None,
device: Optional[Union[str, torch.device]] = None,
timesteps: Optional[List[int]] = None,
**kwargs,
):
"""
Calls the scheduler's `set_timesteps` method and retrieves timesteps from the scheduler after the call. Handles
custom timesteps. Any kwargs will be supplied to `scheduler.set_timesteps`.
Args:
scheduler (`SchedulerMixin`):
The scheduler to get timesteps from.
num_inference_steps (`int`):
The number of diffusion steps used when generating samples with a pre-trained model. If used,
`timesteps` must be `None`.
device (`str` or `torch.device`, *optional*):
The device to which the timesteps should be moved to. If `None`, the timesteps are not moved.
timesteps (`List[int]`, *optional*):
Custom timesteps used to support arbitrary spacing between timesteps. If `None`, then the default
timestep spacing strategy of the scheduler is used. If `timesteps` is passed, `num_inference_steps`
must be `None`.
Returns:
`Tuple[torch.Tensor, int]`: A tuple where the first element is the timestep schedule from the scheduler and the
second element is the number of inference steps.
"""
if timesteps is not None:
accepts_timesteps = "timesteps" in set(inspect.signature(scheduler.set_timesteps).parameters.keys())
if not accepts_timesteps:
raise ValueError(
f"The current scheduler class {scheduler.__class__}'s `set_timesteps` does not support custom"
f" timestep schedules. Please check whether you are using the correct scheduler."
)
scheduler.set_timesteps(timesteps=timesteps, device=device, **kwargs)
timesteps = scheduler.timesteps
num_inference_steps = len(timesteps)
else:
scheduler.set_timesteps(num_inference_steps, device=device, **kwargs)
timesteps = scheduler.timesteps
return timesteps, num_inference_steps
class StableDiffusionXLPipelineIpex(
StableDiffusionXLPipeline,
):
r"""
Pipeline for text-to-image generation using Stable Diffusion XL on IPEX.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
In addition the pipeline inherits the following loading methods:
- *LoRA*: [`loaders.StableDiffusionXLLoraLoaderMixin.load_lora_weights`]
- *Ckpt*: [`loaders.FromSingleFileMixin.from_single_file`]
as well as the following saving methods:
- *LoRA*: [`loaders.StableDiffusionXLLoraLoaderMixin.save_lora_weights`]
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) Model to encode and decode images to and from latent representations.
text_encoder ([`CLIPTextModel`]):
Frozen text-encoder. Stable Diffusion XL uses the text portion of
[CLIP](https://huggingface.co/docs/transformers/model_doc/clip#transformers.CLIPTextModel), specifically
the [clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14) variant.
text_encoder_2 ([` CLIPTextModelWithProjection`]):
Second frozen text-encoder. Stable Diffusion XL uses the text and pool portion of
[CLIP](https://huggingface.co/docs/transformers/model_doc/clip#transformers.CLIPTextModelWithProjection),
specifically the
[laion/CLIP-ViT-bigG-14-laion2B-39B-b160k](https://huggingface.co/laion/CLIP-ViT-bigG-14-laion2B-39B-b160k)
variant.
tokenizer (`CLIPTokenizer`):
Tokenizer of class
[CLIPTokenizer](https://huggingface.co/docs/transformers/v4.21.0/en/model_doc/clip#transformers.CLIPTokenizer).
tokenizer_2 (`CLIPTokenizer`):
Second Tokenizer of class
[CLIPTokenizer](https://huggingface.co/docs/transformers/v4.21.0/en/model_doc/clip#transformers.CLIPTokenizer).
unet ([`UNet2DConditionModel`]): Conditional U-Net architecture to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Can be one of
[`DDIMScheduler`], [`LMSDiscreteScheduler`], or [`PNDMScheduler`].
force_zeros_for_empty_prompt (`bool`, *optional*, defaults to `"True"`):
Whether the negative prompt embeddings shall be forced to always be set to 0. Also see the config of
`stabilityai/stable-diffusion-xl-base-1-0`.
add_watermarker (`bool`, *optional*):
Whether to use the [invisible_watermark library](https://github.com/ShieldMnt/invisible-watermark/) to
watermark output images. If not defined, it will default to True if the package is installed, otherwise no
watermarker will be used.
"""
model_cpu_offload_seq = "text_encoder->text_encoder_2->unet->vae"
_optional_components = [
"tokenizer",
"tokenizer_2",
"text_encoder",
"text_encoder_2",
"image_encoder",
"feature_extractor",
]
_callback_tensor_inputs = [
"latents",
"prompt_embeds",
"negative_prompt_embeds",
"add_text_embeds",
"add_time_ids",
"negative_pooled_prompt_embeds",
"negative_add_time_ids",
]
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
text_encoder_2: CLIPTextModelWithProjection,
tokenizer: CLIPTokenizer,
tokenizer_2: CLIPTokenizer,
unet: UNet2DConditionModel,
scheduler: KarrasDiffusionSchedulers,
image_encoder: CLIPVisionModelWithProjection = None,
feature_extractor: CLIPImageProcessor = None,
force_zeros_for_empty_prompt: bool = True,
add_watermarker: Optional[bool] = None,
):
# super().__init__()
self.register_modules(
vae=vae,
text_encoder=text_encoder,
text_encoder_2=text_encoder_2,
tokenizer=tokenizer,
tokenizer_2=tokenizer_2,
unet=unet,
scheduler=scheduler,
image_encoder=image_encoder,
feature_extractor=feature_extractor,
)
self.register_to_config(force_zeros_for_empty_prompt=force_zeros_for_empty_prompt)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1) if getattr(self, "vae", None) else 8
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
self.default_sample_size = (
self.unet.config.sample_size
if hasattr(self, "unet") and self.unet is not None and hasattr(self.unet.config, "sample_size")
else 128
)
add_watermarker = add_watermarker if add_watermarker is not None else is_invisible_watermark_available()
if add_watermarker:
self.watermark = StableDiffusionXLWatermarker()
else:
self.watermark = None
def encode_prompt(
self,
prompt: str,
prompt_2: Optional[str] = None,
device: Optional[torch.device] = None,
num_images_per_prompt: int = 1,
do_classifier_free_guidance: bool = True,
negative_prompt: Optional[str] = None,
negative_prompt_2: Optional[str] = None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
pooled_prompt_embeds: Optional[torch.Tensor] = None,
negative_pooled_prompt_embeds: Optional[torch.Tensor] = None,
lora_scale: Optional[float] = None,
clip_skip: Optional[int] = None,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
prompt_2 (`str` or `List[str]`, *optional*):
The prompt or prompts to be sent to the `tokenizer_2` and `text_encoder_2`. If not defined, `prompt` is
used in both text-encoders
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
less than `1`).
negative_prompt_2 (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation to be sent to `tokenizer_2` and
`text_encoder_2`. If not defined, `negative_prompt` is used in both text-encoders
prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
pooled_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated pooled text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting.
If not provided, pooled text embeddings will be generated from `prompt` input argument.
negative_pooled_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative pooled text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, pooled negative_prompt_embeds will be generated from `negative_prompt`
input argument.
lora_scale (`float`, *optional*):
A lora scale that will be applied to all LoRA layers of the text encoder if LoRA layers are loaded.
clip_skip (`int`, *optional*):
Number of layers to be skipped from CLIP while computing the prompt embeddings. A value of 1 means that
the output of the pre-final layer will be used for computing the prompt embeddings.
"""
device = device or self._execution_device
# set lora scale so that monkey patched LoRA
# function of text encoder can correctly access it
if lora_scale is not None and isinstance(self, StableDiffusionXLLoraLoaderMixin):
self._lora_scale = lora_scale
# dynamically adjust the LoRA scale
if self.text_encoder is not None:
if not USE_PEFT_BACKEND:
adjust_lora_scale_text_encoder(self.text_encoder, lora_scale)
else:
scale_lora_layers(self.text_encoder, lora_scale)
if self.text_encoder_2 is not None:
if not USE_PEFT_BACKEND:
adjust_lora_scale_text_encoder(self.text_encoder_2, lora_scale)
else:
scale_lora_layers(self.text_encoder_2, lora_scale)
prompt = [prompt] if isinstance(prompt, str) else prompt
if prompt is not None:
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
# Define tokenizers and text encoders
tokenizers = [self.tokenizer, self.tokenizer_2] if self.tokenizer is not None else [self.tokenizer_2]
text_encoders = (
[self.text_encoder, self.text_encoder_2] if self.text_encoder is not None else [self.text_encoder_2]
)
if prompt_embeds is None:
prompt_2 = prompt_2 or prompt
prompt_2 = [prompt_2] if isinstance(prompt_2, str) else prompt_2
# textual inversion: procecss multi-vector tokens if necessary
prompt_embeds_list = []
prompts = [prompt, prompt_2]
for prompt, tokenizer, text_encoder in zip(prompts, tokenizers, text_encoders):
if isinstance(self, TextualInversionLoaderMixin):
prompt = self.maybe_convert_prompt(prompt, tokenizer)
text_inputs = tokenizer(
prompt,
padding="max_length",
max_length=tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = tokenizer.batch_decode(untruncated_ids[:, tokenizer.model_max_length - 1 : -1])
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {tokenizer.model_max_length} tokens: {removed_text}"
)
prompt_embeds = text_encoder(text_input_ids.to(device), output_hidden_states=True)
# We are only ALWAYS interested in the pooled output of the final text encoder
if pooled_prompt_embeds is None and prompt_embeds[0].ndim == 2:
pooled_prompt_embeds = prompt_embeds[0]
if clip_skip is None:
prompt_embeds = prompt_embeds.hidden_states[-2]
else:
# "2" because SDXL always indexes from the penultimate layer.
prompt_embeds = prompt_embeds.hidden_states[-(clip_skip + 2)]
prompt_embeds_list.append(prompt_embeds)
prompt_embeds = torch.concat(prompt_embeds_list, dim=-1)
# get unconditional embeddings for classifier free guidance
zero_out_negative_prompt = negative_prompt is None and self.config.force_zeros_for_empty_prompt
if do_classifier_free_guidance and negative_prompt_embeds is None and zero_out_negative_prompt:
negative_prompt_embeds = torch.zeros_like(prompt_embeds)
negative_pooled_prompt_embeds = torch.zeros_like(pooled_prompt_embeds)
elif do_classifier_free_guidance and negative_prompt_embeds is None:
negative_prompt = negative_prompt or ""
negative_prompt_2 = negative_prompt_2 or negative_prompt
# normalize str to list
negative_prompt = batch_size * [negative_prompt] if isinstance(negative_prompt, str) else negative_prompt
negative_prompt_2 = (
batch_size * [negative_prompt_2] if isinstance(negative_prompt_2, str) else negative_prompt_2
)
uncond_tokens: List[str]
if prompt is not None and type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = [negative_prompt, negative_prompt_2]
negative_prompt_embeds_list = []
for negative_prompt, tokenizer, text_encoder in zip(uncond_tokens, tokenizers, text_encoders):
if isinstance(self, TextualInversionLoaderMixin):
negative_prompt = self.maybe_convert_prompt(negative_prompt, tokenizer)
max_length = prompt_embeds.shape[1]
uncond_input = tokenizer(
negative_prompt,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
negative_prompt_embeds = text_encoder(
uncond_input.input_ids.to(device),
output_hidden_states=True,
)
# We are only ALWAYS interested in the pooled output of the final text encoder
if negative_pooled_prompt_embeds is None and negative_prompt_embeds[0].ndim == 2:
negative_pooled_prompt_embeds = negative_prompt_embeds[0]
negative_prompt_embeds = negative_prompt_embeds.hidden_states[-2]
negative_prompt_embeds_list.append(negative_prompt_embeds)
negative_prompt_embeds = torch.concat(negative_prompt_embeds_list, dim=-1)
if self.text_encoder_2 is not None:
prompt_embeds = prompt_embeds.to(dtype=self.text_encoder_2.dtype, device=device)
else:
prompt_embeds = prompt_embeds.to(dtype=self.unet.dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
if self.text_encoder_2 is not None:
negative_prompt_embeds = negative_prompt_embeds.to(dtype=self.text_encoder_2.dtype, device=device)
else:
negative_prompt_embeds = negative_prompt_embeds.to(dtype=self.unet.dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
pooled_prompt_embeds = pooled_prompt_embeds.repeat(1, num_images_per_prompt).view(
bs_embed * num_images_per_prompt, -1
)
if do_classifier_free_guidance:
negative_pooled_prompt_embeds = negative_pooled_prompt_embeds.repeat(1, num_images_per_prompt).view(
bs_embed * num_images_per_prompt, -1
)
if self.text_encoder is not None:
if isinstance(self, StableDiffusionXLLoraLoaderMixin) and USE_PEFT_BACKEND:
# Retrieve the original scale by scaling back the LoRA layers
unscale_lora_layers(self.text_encoder, lora_scale)
if self.text_encoder_2 is not None:
if isinstance(self, StableDiffusionXLLoraLoaderMixin) and USE_PEFT_BACKEND:
# Retrieve the original scale by scaling back the LoRA layers
unscale_lora_layers(self.text_encoder_2, lora_scale)
return prompt_embeds, negative_prompt_embeds, pooled_prompt_embeds, negative_pooled_prompt_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.encode_image
def encode_image(self, image, device, num_images_per_prompt):
dtype = next(self.image_encoder.parameters()).dtype
if not isinstance(image, torch.Tensor):
image = self.feature_extractor(image, return_tensors="pt").pixel_values
image = image.to(device=device, dtype=dtype)
image_embeds = self.image_encoder(image).image_embeds
image_embeds = image_embeds.repeat_interleave(num_images_per_prompt, dim=0)
uncond_image_embeds = torch.zeros_like(image_embeds)
return image_embeds, uncond_image_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def check_inputs(
self,
prompt,
prompt_2,
height,
width,
callback_steps,
negative_prompt=None,
negative_prompt_2=None,
prompt_embeds=None,
negative_prompt_embeds=None,
pooled_prompt_embeds=None,
negative_pooled_prompt_embeds=None,
callback_on_step_end_tensor_inputs=None,
):
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if callback_on_step_end_tensor_inputs is not None and not all(
k in self._callback_tensor_inputs for k in callback_on_step_end_tensor_inputs
):
raise ValueError(
f"`callback_on_step_end_tensor_inputs` has to be in {self._callback_tensor_inputs}, but found {[k for k in callback_on_step_end_tensor_inputs if k not in self._callback_tensor_inputs]}"
)
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt_2 is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt_2`: {prompt_2} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
elif prompt_2 is not None and (not isinstance(prompt_2, str) and not isinstance(prompt_2, list)):
raise ValueError(f"`prompt_2` has to be of type `str` or `list` but is {type(prompt_2)}")
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
elif negative_prompt_2 is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt_2`: {negative_prompt_2} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
if prompt_embeds is not None and pooled_prompt_embeds is None:
raise ValueError(
"If `prompt_embeds` are provided, `pooled_prompt_embeds` also have to be passed. Make sure to generate `pooled_prompt_embeds` from the same text encoder that was used to generate `prompt_embeds`."
)
if negative_prompt_embeds is not None and negative_pooled_prompt_embeds is None:
raise ValueError(
"If `negative_prompt_embeds` are provided, `negative_pooled_prompt_embeds` also have to be passed. Make sure to generate `negative_pooled_prompt_embeds` from the same text encoder that was used to generate `negative_prompt_embeds`."
)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_latents
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (
batch_size,
num_channels_latents,
int(height) // self.vae_scale_factor,
int(width) // self.vae_scale_factor,
)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=torch.float32)
else:
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
def _get_add_time_ids(
self, original_size, crops_coords_top_left, target_size, dtype, text_encoder_projection_dim=None
):
add_time_ids = list(original_size + crops_coords_top_left + target_size)
passed_add_embed_dim = (
self.unet.config.addition_time_embed_dim * len(add_time_ids) + text_encoder_projection_dim
)
expected_add_embed_dim = self.unet.add_embedding.linear_1.in_features
if expected_add_embed_dim != passed_add_embed_dim:
raise ValueError(
f"Model expects an added time embedding vector of length {expected_add_embed_dim}, but a vector of {passed_add_embed_dim} was created. The model has an incorrect config. Please check `unet.config.time_embedding_type` and `text_encoder_2.config.projection_dim`."
)
add_time_ids = torch.tensor([add_time_ids], dtype=dtype)
return add_time_ids
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_upscale.StableDiffusionUpscalePipeline.upcast_vae
def upcast_vae(self):
dtype = self.vae.dtype
self.vae.to(dtype=torch.float32)
use_torch_2_0_or_xformers = isinstance(
self.vae.decoder.mid_block.attentions[0].processor,
(
AttnProcessor2_0,
XFormersAttnProcessor,
),
)
# if xformers or torch_2_0 is used attention block does not need
# to be in float32 which can save lots of memory
if use_torch_2_0_or_xformers:
self.vae.post_quant_conv.to(dtype)
self.vae.decoder.conv_in.to(dtype)
self.vae.decoder.mid_block.to(dtype)
# Copied from diffusers.pipelines.latent_consistency_models.pipeline_latent_consistency_text2img.LatentConsistencyModelPipeline.get_guidance_scale_embedding
def get_guidance_scale_embedding(self, w, embedding_dim=512, dtype=torch.float32):
"""
See https://github.com/google-research/vdm/blob/dc27b98a554f65cdc654b800da5aa1846545d41b/model_vdm.py#L298
Args:
timesteps (`torch.Tensor`):
generate embedding vectors at these timesteps
embedding_dim (`int`, *optional*, defaults to 512):
dimension of the embeddings to generate
dtype:
data type of the generated embeddings
Returns:
`torch.Tensor`: Embedding vectors with shape `(len(timesteps), embedding_dim)`
"""
assert len(w.shape) == 1
w = w * 1000.0
half_dim = embedding_dim // 2
emb = torch.log(torch.tensor(10000.0)) / (half_dim - 1)
emb = torch.exp(torch.arange(half_dim, dtype=dtype) * -emb)
emb = w.to(dtype)[:, None] * emb[None, :]
emb = torch.cat([torch.sin(emb), torch.cos(emb)], dim=1)
if embedding_dim % 2 == 1: # zero pad
emb = torch.nn.functional.pad(emb, (0, 1))
assert emb.shape == (w.shape[0], embedding_dim)
return emb
@property
def guidance_scale(self):
return self._guidance_scale
@property
def guidance_rescale(self):
return self._guidance_rescale
@property
def clip_skip(self):
return self._clip_skip
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
@property
def do_classifier_free_guidance(self):
return self._guidance_scale > 1 and self.unet.config.time_cond_proj_dim is None
@property
def cross_attention_kwargs(self):
return self._cross_attention_kwargs
@property
def denoising_end(self):
return self._denoising_end
@property
def num_timesteps(self):
return self._num_timesteps
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt: Union[str, List[str]] = None,
prompt_2: Optional[Union[str, List[str]]] = None,
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 50,
timesteps: List[int] = None,
denoising_end: Optional[float] = None,
guidance_scale: float = 5.0,
negative_prompt: Optional[Union[str, List[str]]] = None,
negative_prompt_2: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.Tensor] = None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
pooled_prompt_embeds: Optional[torch.Tensor] = None,
negative_pooled_prompt_embeds: Optional[torch.Tensor] = None,
ip_adapter_image: Optional[PipelineImageInput] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
guidance_rescale: float = 0.0,
original_size: Optional[Tuple[int, int]] = None,
crops_coords_top_left: Tuple[int, int] = (0, 0),
target_size: Optional[Tuple[int, int]] = None,
negative_original_size: Optional[Tuple[int, int]] = None,
negative_crops_coords_top_left: Tuple[int, int] = (0, 0),
negative_target_size: Optional[Tuple[int, int]] = None,
clip_skip: Optional[int] = None,
callback_on_step_end: Optional[Callable[[int, int, Dict], None]] = None,
callback_on_step_end_tensor_inputs: List[str] = ["latents"],
**kwargs,
):
r"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide the image generation. If not defined, one has to pass `prompt_embeds`.
instead.
prompt_2 (`str` or `List[str]`, *optional*):
The prompt or prompts to be sent to the `tokenizer_2` and `text_encoder_2`. If not defined, `prompt` is
used in both text-encoders
height (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The height in pixels of the generated image. This is set to 1024 by default for the best results.
Anything below 512 pixels won't work well for
[stabilityai/stable-diffusion-xl-base-1.0](https://huggingface.co/stabilityai/stable-diffusion-xl-base-1.0)
and checkpoints that are not specifically fine-tuned on low resolutions.
width (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The width in pixels of the generated image. This is set to 1024 by default for the best results.
Anything below 512 pixels won't work well for
[stabilityai/stable-diffusion-xl-base-1.0](https://huggingface.co/stabilityai/stable-diffusion-xl-base-1.0)
and checkpoints that are not specifically fine-tuned on low resolutions.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
timesteps (`List[int]`, *optional*):
Custom timesteps to use for the denoising process with schedulers which support a `timesteps` argument
in their `set_timesteps` method. If not defined, the default behavior when `num_inference_steps` is
passed will be used. Must be in descending order.
denoising_end (`float`, *optional*):
When specified, determines the fraction (between 0.0 and 1.0) of the total denoising process to be
completed before it is intentionally prematurely terminated. As a result, the returned sample will
still retain a substantial amount of noise as determined by the discrete timesteps selected by the
scheduler. The denoising_end parameter should ideally be utilized when this pipeline forms a part of a
"Mixture of Denoisers" multi-pipeline setup, as elaborated in [**Refining the Image
Output**](https://huggingface.co/docs/diffusers/api/pipelines/stable_diffusion/stable_diffusion_xl#refining-the-image-output)
guidance_scale (`float`, *optional*, defaults to 5.0):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
less than `1`).
negative_prompt_2 (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation to be sent to `tokenizer_2` and
`text_encoder_2`. If not defined, `negative_prompt` is used in both text-encoders
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
One or a list of [torch generator(s)](https://pytorch.org/docs/stable/generated/torch.Generator.html)
to make generation deterministic.
latents (`torch.Tensor`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
pooled_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated pooled text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting.
If not provided, pooled text embeddings will be generated from `prompt` input argument.
negative_pooled_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative pooled text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, pooled negative_prompt_embeds will be generated from `negative_prompt`
input argument.
ip_adapter_image: (`PipelineImageInput`, *optional*): Optional image input to work with IP Adapters.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion_xl.StableDiffusionXLPipelineOutput`] instead
of a plain tuple.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the `AttentionProcessor` as defined under
`self.processor` in
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
guidance_rescale (`float`, *optional*, defaults to 0.0):
Guidance rescale factor proposed by [Common Diffusion Noise Schedules and Sample Steps are
Flawed](https://arxiv.org/pdf/2305.08891.pdf) `guidance_scale` is defined as `φ` in equation 16. of
[Common Diffusion Noise Schedules and Sample Steps are Flawed](https://arxiv.org/pdf/2305.08891.pdf).
Guidance rescale factor should fix overexposure when using zero terminal SNR.
original_size (`Tuple[int]`, *optional*, defaults to (1024, 1024)):
If `original_size` is not the same as `target_size` the image will appear to be down- or upsampled.
`original_size` defaults to `(height, width)` if not specified. Part of SDXL's micro-conditioning as
explained in section 2.2 of
[https://huggingface.co/papers/2307.01952](https://huggingface.co/papers/2307.01952).
crops_coords_top_left (`Tuple[int]`, *optional*, defaults to (0, 0)):
`crops_coords_top_left` can be used to generate an image that appears to be "cropped" from the position
`crops_coords_top_left` downwards. Favorable, well-centered images are usually achieved by setting
`crops_coords_top_left` to (0, 0). Part of SDXL's micro-conditioning as explained in section 2.2 of
[https://huggingface.co/papers/2307.01952](https://huggingface.co/papers/2307.01952).
target_size (`Tuple[int]`, *optional*, defaults to (1024, 1024)):
For most cases, `target_size` should be set to the desired height and width of the generated image. If
not specified it will default to `(height, width)`. Part of SDXL's micro-conditioning as explained in
section 2.2 of [https://huggingface.co/papers/2307.01952](https://huggingface.co/papers/2307.01952).
negative_original_size (`Tuple[int]`, *optional*, defaults to (1024, 1024)):
To negatively condition the generation process based on a specific image resolution. Part of SDXL's
micro-conditioning as explained in section 2.2 of
[https://huggingface.co/papers/2307.01952](https://huggingface.co/papers/2307.01952). For more
information, refer to this issue thread: https://github.com/huggingface/diffusers/issues/4208.
negative_crops_coords_top_left (`Tuple[int]`, *optional*, defaults to (0, 0)):
To negatively condition the generation process based on a specific crop coordinates. Part of SDXL's
micro-conditioning as explained in section 2.2 of
[https://huggingface.co/papers/2307.01952](https://huggingface.co/papers/2307.01952). For more
information, refer to this issue thread: https://github.com/huggingface/diffusers/issues/4208.
negative_target_size (`Tuple[int]`, *optional*, defaults to (1024, 1024)):
To negatively condition the generation process based on a target image resolution. It should be as same
as the `target_size` for most cases. Part of SDXL's micro-conditioning as explained in section 2.2 of
[https://huggingface.co/papers/2307.01952](https://huggingface.co/papers/2307.01952). For more
information, refer to this issue thread: https://github.com/huggingface/diffusers/issues/4208.
callback_on_step_end (`Callable`, *optional*):
A function that calls at the end of each denoising steps during the inference. The function is called
with the following arguments: `callback_on_step_end(self: DiffusionPipeline, step: int, timestep: int,
callback_kwargs: Dict)`. `callback_kwargs` will include a list of all tensors as specified by
`callback_on_step_end_tensor_inputs`.
callback_on_step_end_tensor_inputs (`List`, *optional*):
The list of tensor inputs for the `callback_on_step_end` function. The tensors specified in the list
will be passed as `callback_kwargs` argument. You will only be able to include variables listed in the
`._callback_tensor_inputs` attribute of your pipeline class.
Examples:
Returns:
[`~pipelines.stable_diffusion_xl.StableDiffusionXLPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion_xl.StableDiffusionXLPipelineOutput`] if `return_dict` is True, otherwise a
`tuple`. When returning a tuple, the first element is a list with the generated images.
"""
callback = kwargs.pop("callback", None)
callback_steps = kwargs.pop("callback_steps", None)
if callback is not None:
deprecate(
"callback",
"1.0.0",
"Passing `callback` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
if callback_steps is not None:
deprecate(
"callback_steps",
"1.0.0",
"Passing `callback_steps` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
# 0. Default height and width to unet
height = height or self.default_sample_size * self.vae_scale_factor
width = width or self.default_sample_size * self.vae_scale_factor
original_size = original_size or (height, width)
target_size = target_size or (height, width)
# 1. Check inputs. Raise error if not correct
self.check_inputs(
prompt,
prompt_2,
height,
width,
callback_steps,
negative_prompt,
negative_prompt_2,
prompt_embeds,
negative_prompt_embeds,
pooled_prompt_embeds,
negative_pooled_prompt_embeds,
callback_on_step_end_tensor_inputs,
)
self._guidance_scale = guidance_scale
self._guidance_rescale = guidance_rescale
self._clip_skip = clip_skip
self._cross_attention_kwargs = cross_attention_kwargs
self._denoising_end = denoising_end
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
device = self._execution_device
# 3. Encode input prompt
lora_scale = (
self.cross_attention_kwargs.get("scale", None) if self.cross_attention_kwargs is not None else None
)
(
prompt_embeds,
negative_prompt_embeds,
pooled_prompt_embeds,
negative_pooled_prompt_embeds,
) = self.encode_prompt(
prompt=prompt,
prompt_2=prompt_2,
device=device,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=self.do_classifier_free_guidance,
negative_prompt=negative_prompt,
negative_prompt_2=negative_prompt_2,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
pooled_prompt_embeds=pooled_prompt_embeds,
negative_pooled_prompt_embeds=negative_pooled_prompt_embeds,
lora_scale=lora_scale,
clip_skip=self.clip_skip,
)
# 4. Prepare timesteps
timesteps, num_inference_steps = retrieve_timesteps(self.scheduler, num_inference_steps, device, timesteps)
# 5. Prepare latent variables
num_channels_latents = self.unet.config.in_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
)
# 6. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 7. Prepare added time ids & embeddings
add_text_embeds = pooled_prompt_embeds
if self.text_encoder_2 is None:
text_encoder_projection_dim = int(pooled_prompt_embeds.shape[-1])
else:
text_encoder_projection_dim = self.text_encoder_2.config.projection_dim
add_time_ids = self._get_add_time_ids(
original_size,
crops_coords_top_left,
target_size,
dtype=prompt_embeds.dtype,
text_encoder_projection_dim=text_encoder_projection_dim,
)
if negative_original_size is not None and negative_target_size is not None:
negative_add_time_ids = self._get_add_time_ids(
negative_original_size,
negative_crops_coords_top_left,
negative_target_size,
dtype=prompt_embeds.dtype,
text_encoder_projection_dim=text_encoder_projection_dim,
)
else:
negative_add_time_ids = add_time_ids
if self.do_classifier_free_guidance:
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds], dim=0)
add_text_embeds = torch.cat([negative_pooled_prompt_embeds, add_text_embeds], dim=0)
add_time_ids = torch.cat([negative_add_time_ids, add_time_ids], dim=0)
prompt_embeds = prompt_embeds.to(device)
add_text_embeds = add_text_embeds.to(device)
add_time_ids = add_time_ids.to(device).repeat(batch_size * num_images_per_prompt, 1)
if ip_adapter_image is not None:
image_embeds, negative_image_embeds = self.encode_image(ip_adapter_image, device, num_images_per_prompt)
if self.do_classifier_free_guidance:
image_embeds = torch.cat([negative_image_embeds, image_embeds])
image_embeds = image_embeds.to(device)
# 8. Denoising loop
num_warmup_steps = max(len(timesteps) - num_inference_steps * self.scheduler.order, 0)
# 8.1 Apply denoising_end
if (
self.denoising_end is not None
and isinstance(self.denoising_end, float)
and self.denoising_end > 0
and self.denoising_end < 1
):
discrete_timestep_cutoff = int(
round(
self.scheduler.config.num_train_timesteps
- (self.denoising_end * self.scheduler.config.num_train_timesteps)
)
)
num_inference_steps = len(list(filter(lambda ts: ts >= discrete_timestep_cutoff, timesteps)))
timesteps = timesteps[:num_inference_steps]
# 9. Optionally get Guidance Scale Embedding
timestep_cond = None
if self.unet.config.time_cond_proj_dim is not None:
guidance_scale_tensor = torch.tensor(self.guidance_scale - 1).repeat(batch_size * num_images_per_prompt)
timestep_cond = self.get_guidance_scale_embedding(
guidance_scale_tensor, embedding_dim=self.unet.config.time_cond_proj_dim
).to(device=device, dtype=latents.dtype)
self._num_timesteps = len(timesteps)
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if self.do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
# predict the noise residual
added_cond_kwargs = {"text_embeds": add_text_embeds, "time_ids": add_time_ids}
if ip_adapter_image is not None:
added_cond_kwargs["image_embeds"] = image_embeds
# noise_pred = self.unet(
# latent_model_input,
# t,
# encoder_hidden_states=prompt_embeds,
# timestep_cond=timestep_cond,
# cross_attention_kwargs=self.cross_attention_kwargs,
# added_cond_kwargs=added_cond_kwargs,
# return_dict=False,
# )[0]
noise_pred = self.unet(
latent_model_input,
t,
encoder_hidden_states=prompt_embeds,
added_cond_kwargs=added_cond_kwargs,
)["sample"]
# perform guidance
if self.do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + self.guidance_scale * (noise_pred_text - noise_pred_uncond)
if self.do_classifier_free_guidance and self.guidance_rescale > 0.0:
# Based on 3.4. in https://arxiv.org/pdf/2305.08891.pdf
noise_pred = rescale_noise_cfg(noise_pred, noise_pred_text, guidance_rescale=self.guidance_rescale)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs, return_dict=False)[0]
if callback_on_step_end is not None:
callback_kwargs = {}
for k in callback_on_step_end_tensor_inputs:
callback_kwargs[k] = locals()[k]
callback_outputs = callback_on_step_end(self, i, t, callback_kwargs)
latents = callback_outputs.pop("latents", latents)
prompt_embeds = callback_outputs.pop("prompt_embeds", prompt_embeds)
negative_prompt_embeds = callback_outputs.pop("negative_prompt_embeds", negative_prompt_embeds)
add_text_embeds = callback_outputs.pop("add_text_embeds", add_text_embeds)
negative_pooled_prompt_embeds = callback_outputs.pop(
"negative_pooled_prompt_embeds", negative_pooled_prompt_embeds
)
add_time_ids = callback_outputs.pop("add_time_ids", add_time_ids)
negative_add_time_ids = callback_outputs.pop("negative_add_time_ids", negative_add_time_ids)
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if XLA_AVAILABLE:
xm.mark_step()
if not output_type == "latent":
# make sure the VAE is in float32 mode, as it overflows in float16
needs_upcasting = self.vae.dtype == torch.float16 and self.vae.config.force_upcast
if needs_upcasting:
self.upcast_vae()
latents = latents.to(next(iter(self.vae.post_quant_conv.parameters())).dtype)
image = self.vae.decode(latents / self.vae.config.scaling_factor, return_dict=False)[0]
# cast back to fp16 if needed
if needs_upcasting:
self.vae.to(dtype=torch.float16)
else:
image = latents
if not output_type == "latent":
# apply watermark if available
if self.watermark is not None:
image = self.watermark.apply_watermark(image)
image = self.image_processor.postprocess(image, output_type=output_type)
# Offload all models
self.maybe_free_model_hooks()
if not return_dict:
return (image,)
return StableDiffusionXLPipelineOutput(images=image)
@torch.no_grad()
def prepare_for_ipex(
self,
dtype=torch.float32,
prompt: Union[str, List[str]] = None,
prompt_2: Optional[Union[str, List[str]]] = None,
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 50,
timesteps: List[int] = None,
denoising_end: Optional[float] = None,
guidance_scale: float = 5.0,
negative_prompt: Optional[Union[str, List[str]]] = None,
negative_prompt_2: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.Tensor] = None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
pooled_prompt_embeds: Optional[torch.Tensor] = None,
negative_pooled_prompt_embeds: Optional[torch.Tensor] = None,
ip_adapter_image: Optional[PipelineImageInput] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
guidance_rescale: float = 0.0,
original_size: Optional[Tuple[int, int]] = None,
crops_coords_top_left: Tuple[int, int] = (0, 0),
target_size: Optional[Tuple[int, int]] = None,
negative_original_size: Optional[Tuple[int, int]] = None,
negative_crops_coords_top_left: Tuple[int, int] = (0, 0),
negative_target_size: Optional[Tuple[int, int]] = None,
clip_skip: Optional[int] = None,
callback_on_step_end: Optional[Callable[[int, int, Dict], None]] = None,
callback_on_step_end_tensor_inputs: List[str] = ["latents"],
**kwargs,
):
callback = kwargs.pop("callback", None)
callback_steps = kwargs.pop("callback_steps", None)
if callback is not None:
deprecate(
"callback",
"1.0.0",
"Passing `callback` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
if callback_steps is not None:
deprecate(
"callback_steps",
"1.0.0",
"Passing `callback_steps` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
# 0. Default height and width to unet
height = height or self.default_sample_size * self.vae_scale_factor
width = width or self.default_sample_size * self.vae_scale_factor
original_size = original_size or (height, width)
target_size = target_size or (height, width)
# 1. Check inputs. Raise error if not correct
self.check_inputs(
prompt,
prompt_2,
height,
width,
callback_steps,
negative_prompt,
negative_prompt_2,
prompt_embeds,
negative_prompt_embeds,
pooled_prompt_embeds,
negative_pooled_prompt_embeds,
callback_on_step_end_tensor_inputs,
)
self._guidance_scale = guidance_scale
self._guidance_rescale = guidance_rescale
self._clip_skip = clip_skip
self._cross_attention_kwargs = cross_attention_kwargs
self._denoising_end = denoising_end
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
device = "cpu"
do_classifier_free_guidance = self.do_classifier_free_guidance
# 3. Encode input prompt
lora_scale = (
self.cross_attention_kwargs.get("scale", None) if self.cross_attention_kwargs is not None else None
)
(
prompt_embeds,
negative_prompt_embeds,
pooled_prompt_embeds,
negative_pooled_prompt_embeds,
) = self.encode_prompt(
prompt=prompt,
prompt_2=prompt_2,
device=device,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=self.do_classifier_free_guidance,
negative_prompt=negative_prompt,
negative_prompt_2=negative_prompt_2,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
pooled_prompt_embeds=pooled_prompt_embeds,
negative_pooled_prompt_embeds=negative_pooled_prompt_embeds,
lora_scale=lora_scale,
clip_skip=self.clip_skip,
)
# 5. Prepare latent variables
num_channels_latents = self.unet.config.in_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
)
# 7. Prepare added time ids & embeddings
add_text_embeds = pooled_prompt_embeds
if self.text_encoder_2 is None:
text_encoder_projection_dim = int(pooled_prompt_embeds.shape[-1])
else:
text_encoder_projection_dim = self.text_encoder_2.config.projection_dim
add_time_ids = self._get_add_time_ids(
original_size,
crops_coords_top_left,
target_size,
dtype=prompt_embeds.dtype,
text_encoder_projection_dim=text_encoder_projection_dim,
)
if negative_original_size is not None and negative_target_size is not None:
negative_add_time_ids = self._get_add_time_ids(
negative_original_size,
negative_crops_coords_top_left,
negative_target_size,
dtype=prompt_embeds.dtype,
text_encoder_projection_dim=text_encoder_projection_dim,
)
else:
negative_add_time_ids = add_time_ids
if self.do_classifier_free_guidance:
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds], dim=0)
add_text_embeds = torch.cat([negative_pooled_prompt_embeds, add_text_embeds], dim=0)
add_time_ids = torch.cat([negative_add_time_ids, add_time_ids], dim=0)
prompt_embeds = prompt_embeds.to(device)
add_text_embeds = add_text_embeds.to(device)
add_time_ids = add_time_ids.to(device).repeat(batch_size * num_images_per_prompt, 1)
if ip_adapter_image is not None:
image_embeds, negative_image_embeds = self.encode_image(ip_adapter_image, device, num_images_per_prompt)
if self.do_classifier_free_guidance:
image_embeds = torch.cat([negative_image_embeds, image_embeds])
image_embeds = image_embeds.to(device)
dummy = torch.ones(1, dtype=torch.int32)
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, dummy)
# predict the noise residual
added_cond_kwargs = {"text_embeds": add_text_embeds, "time_ids": add_time_ids}
if ip_adapter_image is not None:
added_cond_kwargs["image_embeds"] = image_embeds
if not output_type == "latent":
# make sure the VAE is in float32 mode, as it overflows in float16
needs_upcasting = self.vae.dtype == torch.float16 and self.vae.config.force_upcast
if needs_upcasting:
self.upcast_vae()
latents = latents.to(next(iter(self.vae.post_quant_conv.parameters())).dtype)
# cast back to fp16 if needed
if needs_upcasting:
self.vae.to(dtype=torch.float16)
self.unet = self.unet.to(memory_format=torch.channels_last)
self.vae.decoder = self.vae.decoder.to(memory_format=torch.channels_last)
self.text_encoder = self.text_encoder.to(memory_format=torch.channels_last)
unet_input_example = {
"sample": latent_model_input,
"timestep": dummy,
"encoder_hidden_states": prompt_embeds,
"added_cond_kwargs": added_cond_kwargs,
}
vae_decoder_input_example = latents
# optimize with ipex
if dtype == torch.bfloat16:
self.unet = ipex.optimize(
self.unet.eval(),
dtype=torch.bfloat16,
inplace=True,
)
self.vae.decoder = ipex.optimize(self.vae.decoder.eval(), dtype=torch.bfloat16, inplace=True)
self.text_encoder = ipex.optimize(self.text_encoder.eval(), dtype=torch.bfloat16, inplace=True)
elif dtype == torch.float32:
self.unet = ipex.optimize(
self.unet.eval(),
dtype=torch.float32,
inplace=True,
level="O1",
weights_prepack=True,
auto_kernel_selection=False,
)
self.vae.decoder = ipex.optimize(
self.vae.decoder.eval(),
dtype=torch.float32,
inplace=True,
level="O1",
weights_prepack=True,
auto_kernel_selection=False,
)
self.text_encoder = ipex.optimize(
self.text_encoder.eval(),
dtype=torch.float32,
inplace=True,
level="O1",
weights_prepack=True,
auto_kernel_selection=False,
)
else:
raise ValueError(" The value of 'dtype' should be 'torch.bfloat16' or 'torch.float32' !")
# trace unet model to get better performance on IPEX
with torch.cpu.amp.autocast(enabled=dtype == torch.bfloat16), torch.no_grad():
unet_trace_model = torch.jit.trace(
self.unet, example_kwarg_inputs=unet_input_example, check_trace=False, strict=False
)
unet_trace_model = torch.jit.freeze(unet_trace_model)
self.unet.forward = unet_trace_model.forward
# trace vae.decoder model to get better performance on IPEX
with torch.cpu.amp.autocast(enabled=dtype == torch.bfloat16), torch.no_grad():
vae_decoder_trace_model = torch.jit.trace(
self.vae.decoder, vae_decoder_input_example, check_trace=False, strict=False
)
vae_decoder_trace_model = torch.jit.freeze(vae_decoder_trace_model)
self.vae.decoder.forward = vae_decoder_trace_model.forward
| diffusers/examples/community/pipeline_stable_diffusion_xl_ipex.py/0 | {
"file_path": "diffusers/examples/community/pipeline_stable_diffusion_xl_ipex.py",
"repo_id": "diffusers",
"token_count": 32241
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
from typing import Any, Callable, Dict, List, Optional, Union
import intel_extension_for_pytorch as ipex
import torch
from packaging import version
from transformers import CLIPImageProcessor, CLIPTextModel, CLIPTokenizer
from diffusers.configuration_utils import FrozenDict
from diffusers.loaders import StableDiffusionLoraLoaderMixin, TextualInversionLoaderMixin
from diffusers.models import AutoencoderKL, UNet2DConditionModel
from diffusers.pipelines.pipeline_utils import DiffusionPipeline, StableDiffusionMixin
from diffusers.pipelines.stable_diffusion import StableDiffusionPipelineOutput
from diffusers.pipelines.stable_diffusion.safety_checker import StableDiffusionSafetyChecker
from diffusers.schedulers import KarrasDiffusionSchedulers
from diffusers.utils import (
deprecate,
logging,
replace_example_docstring,
)
from diffusers.utils.torch_utils import randn_tensor
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import torch
>>> from diffusers import StableDiffusionPipeline
>>> pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", custom_pipeline="stable_diffusion_ipex")
>>> # For Float32
>>> pipe.prepare_for_ipex(prompt, dtype=torch.float32, height=512, width=512) #value of image height/width should be consistent with the pipeline inference
>>> # For BFloat16
>>> pipe.prepare_for_ipex(prompt, dtype=torch.bfloat16, height=512, width=512) #value of image height/width should be consistent with the pipeline inference
>>> prompt = "a photo of an astronaut riding a horse on mars"
>>> # For Float32
>>> image = pipe(prompt, num_inference_steps=num_inference_steps, height=512, width=512).images[0] #value of image height/width should be consistent with 'prepare_for_ipex()'
>>> # For BFloat16
>>> with torch.cpu.amp.autocast(enabled=True, dtype=torch.bfloat16):
>>> image = pipe(prompt, num_inference_steps=num_inference_steps, height=512, width=512).images[0] #value of image height/width should be consistent with 'prepare_for_ipex()'
```
"""
class StableDiffusionIPEXPipeline(
DiffusionPipeline, StableDiffusionMixin, TextualInversionLoaderMixin, StableDiffusionLoraLoaderMixin
):
r"""
Pipeline for text-to-image generation using Stable Diffusion on IPEX.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) Model to encode and decode images to and from latent representations.
text_encoder ([`CLIPTextModel`]):
Frozen text-encoder. Stable Diffusion uses the text portion of
[CLIP](https://huggingface.co/docs/transformers/model_doc/clip#transformers.CLIPTextModel), specifically
the [clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14) variant.
tokenizer (`CLIPTokenizer`):
Tokenizer of class
[CLIPTokenizer](https://huggingface.co/docs/transformers/v4.21.0/en/model_doc/clip#transformers.CLIPTokenizer).
unet ([`UNet2DConditionModel`]): Conditional U-Net architecture to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Can be one of
[`DDIMScheduler`], [`LMSDiscreteScheduler`], or [`PNDMScheduler`].
safety_checker ([`StableDiffusionSafetyChecker`]):
Classification module that estimates whether generated images could be considered offensive or harmful.
Please, refer to the [model card](https://huggingface.co/runwayml/stable-diffusion-v1-5) for details.
feature_extractor ([`CLIPImageProcessor`]):
Model that extracts features from generated images to be used as inputs for the `safety_checker`.
"""
_optional_components = ["safety_checker", "feature_extractor"]
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
scheduler: KarrasDiffusionSchedulers,
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
requires_safety_checker: bool = True,
):
super().__init__()
if scheduler is not None and getattr(scheduler.config, "steps_offset", 1) != 1:
deprecation_message = (
f"The configuration file of this scheduler: {scheduler} is outdated. `steps_offset`"
f" should be set to 1 instead of {scheduler.config.steps_offset}. Please make sure "
"to update the config accordingly as leaving `steps_offset` might led to incorrect results"
" in future versions. If you have downloaded this checkpoint from the Hugging Face Hub,"
" it would be very nice if you could open a Pull request for the `scheduler/scheduler_config.json`"
" file"
)
deprecate("steps_offset!=1", "1.0.0", deprecation_message, standard_warn=False)
new_config = dict(scheduler.config)
new_config["steps_offset"] = 1
scheduler._internal_dict = FrozenDict(new_config)
if scheduler is not None and getattr(scheduler.config, "clip_sample", False) is True:
deprecation_message = (
f"The configuration file of this scheduler: {scheduler} has not set the configuration `clip_sample`."
" `clip_sample` should be set to False in the configuration file. Please make sure to update the"
" config accordingly as not setting `clip_sample` in the config might lead to incorrect results in"
" future versions. If you have downloaded this checkpoint from the Hugging Face Hub, it would be very"
" nice if you could open a Pull request for the `scheduler/scheduler_config.json` file"
)
deprecate("clip_sample not set", "1.0.0", deprecation_message, standard_warn=False)
new_config = dict(scheduler.config)
new_config["clip_sample"] = False
scheduler._internal_dict = FrozenDict(new_config)
if safety_checker is None and requires_safety_checker:
logger.warning(
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
)
if safety_checker is not None and feature_extractor is None:
raise ValueError(
"Make sure to define a feature extractor when loading {self.__class__} if you want to use the safety"
" checker. If you do not want to use the safety checker, you can pass `'safety_checker=None'` instead."
)
is_unet_version_less_0_9_0 = (
unet is not None
and hasattr(unet.config, "_diffusers_version")
and version.parse(version.parse(unet.config._diffusers_version).base_version) < version.parse("0.9.0.dev0")
)
is_unet_sample_size_less_64 = (
unet is not None and hasattr(unet.config, "sample_size") and unet.config.sample_size < 64
)
if is_unet_version_less_0_9_0 and is_unet_sample_size_less_64:
deprecation_message = (
"The configuration file of the unet has set the default `sample_size` to smaller than"
" 64 which seems highly unlikely. If your checkpoint is a fine-tuned version of any of the"
" following: \n- CompVis/stable-diffusion-v1-4 \n- CompVis/stable-diffusion-v1-3 \n-"
" CompVis/stable-diffusion-v1-2 \n- CompVis/stable-diffusion-v1-1 \n- runwayml/stable-diffusion-v1-5"
" \n- runwayml/stable-diffusion-inpainting \n you should change 'sample_size' to 64 in the"
" configuration file. Please make sure to update the config accordingly as leaving `sample_size=32`"
" in the config might lead to incorrect results in future versions. If you have downloaded this"
" checkpoint from the Hugging Face Hub, it would be very nice if you could open a Pull request for"
" the `unet/config.json` file"
)
deprecate("sample_size<64", "1.0.0", deprecation_message, standard_warn=False)
new_config = dict(unet.config)
new_config["sample_size"] = 64
unet._internal_dict = FrozenDict(new_config)
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1) if getattr(self, "vae", None) else 8
self.register_to_config(requires_safety_checker=requires_safety_checker)
def get_input_example(self, prompt, height=None, width=None, guidance_scale=7.5, num_images_per_prompt=1):
prompt_embeds = None
negative_prompt_embeds = None
negative_prompt = None
callback_steps = 1
generator = None
latents = None
# 0. Default height and width to unet
height = height or self.unet.config.sample_size * self.vae_scale_factor
width = width or self.unet.config.sample_size * self.vae_scale_factor
# 1. Check inputs. Raise error if not correct
self.check_inputs(
prompt, height, width, callback_steps, negative_prompt, prompt_embeds, negative_prompt_embeds
)
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
device = "cpu"
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 3. Encode input prompt
prompt_embeds = self._encode_prompt(
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
)
# 5. Prepare latent variables
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
self.unet.config.in_channels,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
)
dummy = torch.ones(1, dtype=torch.int32)
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, dummy)
unet_input_example = (latent_model_input, dummy, prompt_embeds)
vae_decoder_input_example = latents
return unet_input_example, vae_decoder_input_example
def prepare_for_ipex(self, promt, dtype=torch.float32, height=None, width=None, guidance_scale=7.5):
self.unet = self.unet.to(memory_format=torch.channels_last)
self.vae.decoder = self.vae.decoder.to(memory_format=torch.channels_last)
self.text_encoder = self.text_encoder.to(memory_format=torch.channels_last)
if self.safety_checker is not None:
self.safety_checker = self.safety_checker.to(memory_format=torch.channels_last)
unet_input_example, vae_decoder_input_example = self.get_input_example(promt, height, width, guidance_scale)
# optimize with ipex
if dtype == torch.bfloat16:
self.unet = ipex.optimize(self.unet.eval(), dtype=torch.bfloat16, inplace=True)
self.vae.decoder = ipex.optimize(self.vae.decoder.eval(), dtype=torch.bfloat16, inplace=True)
self.text_encoder = ipex.optimize(self.text_encoder.eval(), dtype=torch.bfloat16, inplace=True)
if self.safety_checker is not None:
self.safety_checker = ipex.optimize(self.safety_checker.eval(), dtype=torch.bfloat16, inplace=True)
elif dtype == torch.float32:
self.unet = ipex.optimize(
self.unet.eval(),
dtype=torch.float32,
inplace=True,
weights_prepack=True,
auto_kernel_selection=False,
)
self.vae.decoder = ipex.optimize(
self.vae.decoder.eval(),
dtype=torch.float32,
inplace=True,
weights_prepack=True,
auto_kernel_selection=False,
)
self.text_encoder = ipex.optimize(
self.text_encoder.eval(),
dtype=torch.float32,
inplace=True,
weights_prepack=True,
auto_kernel_selection=False,
)
if self.safety_checker is not None:
self.safety_checker = ipex.optimize(
self.safety_checker.eval(),
dtype=torch.float32,
inplace=True,
weights_prepack=True,
auto_kernel_selection=False,
)
else:
raise ValueError(" The value of 'dtype' should be 'torch.bfloat16' or 'torch.float32' !")
# trace unet model to get better performance on IPEX
with torch.cpu.amp.autocast(enabled=dtype == torch.bfloat16), torch.no_grad():
unet_trace_model = torch.jit.trace(self.unet, unet_input_example, check_trace=False, strict=False)
unet_trace_model = torch.jit.freeze(unet_trace_model)
self.unet.forward = unet_trace_model.forward
# trace vae.decoder model to get better performance on IPEX
with torch.cpu.amp.autocast(enabled=dtype == torch.bfloat16), torch.no_grad():
ave_decoder_trace_model = torch.jit.trace(
self.vae.decoder, vae_decoder_input_example, check_trace=False, strict=False
)
ave_decoder_trace_model = torch.jit.freeze(ave_decoder_trace_model)
self.vae.decoder.forward = ave_decoder_trace_model.forward
def _encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds`. instead. If not defined, one has to pass `negative_prompt_embeds`. instead.
Ignored when not using guidance (i.e., ignored if `guidance_scale` is less than `1`).
prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
"""
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if prompt_embeds is None:
# textual inversion: process multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
prompt = self.maybe_convert_prompt(prompt, self.tokenizer)
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.tokenizer.batch_decode(
untruncated_ids[:, self.tokenizer.model_max_length - 1 : -1]
)
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = text_inputs.attention_mask.to(device)
else:
attention_mask = None
prompt_embeds = self.text_encoder(
text_input_ids.to(device),
attention_mask=attention_mask,
)
prompt_embeds = prompt_embeds[0]
prompt_embeds = prompt_embeds.to(dtype=self.text_encoder.dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance and negative_prompt_embeds is None:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
# textual inversion: process multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
uncond_tokens = self.maybe_convert_prompt(uncond_tokens, self.tokenizer)
max_length = prompt_embeds.shape[1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = uncond_input.attention_mask.to(device)
else:
attention_mask = None
negative_prompt_embeds = self.text_encoder(
uncond_input.input_ids.to(device),
attention_mask=attention_mask,
)
negative_prompt_embeds = negative_prompt_embeds[0]
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=self.text_encoder.dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds])
return prompt_embeds
def run_safety_checker(self, image, device, dtype):
if self.safety_checker is not None:
safety_checker_input = self.feature_extractor(self.numpy_to_pil(image), return_tensors="pt").to(device)
image, has_nsfw_concept = self.safety_checker(
images=image, clip_input=safety_checker_input.pixel_values.to(dtype)
)
else:
has_nsfw_concept = None
return image, has_nsfw_concept
def decode_latents(self, latents):
latents = 1 / self.vae.config.scaling_factor * latents
image = self.vae.decode(latents).sample
image = (image / 2 + 0.5).clamp(0, 1)
# we always cast to float32 as this does not cause significant overhead and is compatible with bfloat16
image = image.cpu().permute(0, 2, 3, 1).float().numpy()
return image
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def check_inputs(
self,
prompt,
height,
width,
callback_steps,
negative_prompt=None,
prompt_embeds=None,
negative_prompt_embeds=None,
):
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (
batch_size,
num_channels_latents,
int(height) // self.vae_scale_factor,
int(width) // self.vae_scale_factor,
)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt: Union[str, List[str]] = None,
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 50,
guidance_scale: float = 7.5,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.Tensor] = None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.Tensor], None]] = None,
callback_steps: int = 1,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
):
r"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide the image generation. If not defined, one has to pass `prompt_embeds`.
instead.
height (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 7.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds`. instead. If not defined, one has to pass `negative_prompt_embeds`. instead.
Ignored when not using guidance (i.e., ignored if `guidance_scale` is less than `1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
One or a list of [torch generator(s)](https://pytorch.org/docs/stable/generated/torch.Generator.html)
to make generation deterministic.
latents (`torch.Tensor`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: torch.Tensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the `AttnProcessor` as defined under
`self.processor` in
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
Examples:
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
# 0. Default height and width to unet
height = height or self.unet.config.sample_size * self.vae_scale_factor
width = width or self.unet.config.sample_size * self.vae_scale_factor
# 1. Check inputs. Raise error if not correct
self.check_inputs(
prompt, height, width, callback_steps, negative_prompt, prompt_embeds, negative_prompt_embeds
)
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
device = self._execution_device
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 3. Encode input prompt
prompt_embeds = self._encode_prompt(
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
)
# 4. Prepare timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# 5. Prepare latent variables
num_channels_latents = self.unet.config.in_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
)
# 6. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 7. Denoising loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
# predict the noise residual
noise_pred = self.unet(latent_model_input, t, encoder_hidden_states=prompt_embeds)["sample"]
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs).prev_sample
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if output_type == "latent":
image = latents
has_nsfw_concept = None
elif output_type == "pil":
# 8. Post-processing
image = self.decode_latents(latents)
# 9. Run safety checker
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
# 10. Convert to PIL
image = self.numpy_to_pil(image)
else:
# 8. Post-processing
image = self.decode_latents(latents)
# 9. Run safety checker
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
# Offload last model to CPU
if hasattr(self, "final_offload_hook") and self.final_offload_hook is not None:
self.final_offload_hook.offload()
if not return_dict:
return (image, has_nsfw_concept)
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
| diffusers/examples/community/stable_diffusion_ipex.py/0 | {
"file_path": "diffusers/examples/community/stable_diffusion_ipex.py",
"repo_id": "diffusers",
"token_count": 16861
} |
# Latent Consistency Distillation Example:
[Latent Consistency Models (LCMs)](https://arxiv.org/abs/2310.04378) is a method to distill a latent diffusion model to enable swift inference with minimal steps. This example demonstrates how to use latent consistency distillation to distill stable-diffusion-v1.5 for inference with few timesteps.
## Full model distillation
### Running locally with PyTorch
#### Installing the dependencies
Before running the scripts, make sure to install the library's training dependencies:
**Important**
To make sure you can successfully run the latest versions of the example scripts, we highly recommend **installing from source** and keeping the install up to date as we update the example scripts frequently and install some example-specific requirements. To do this, execute the following steps in a new virtual environment:
```bash
git clone https://github.com/huggingface/diffusers
cd diffusers
pip install -e .
```
Then cd in the example folder and run
```bash
pip install -r requirements.txt
```
And initialize an [🤗 Accelerate](https://github.com/huggingface/accelerate/) environment with:
```bash
accelerate config
```
Or for a default accelerate configuration without answering questions about your environment
```bash
accelerate config default
```
Or if your environment doesn't support an interactive shell e.g. a notebook
```python
from accelerate.utils import write_basic_config
write_basic_config()
```
When running `accelerate config`, if we specify torch compile mode to True there can be dramatic speedups.
#### Example
The following uses the [Conceptual Captions 12M (CC12M) dataset](https://github.com/google-research-datasets/conceptual-12m) as an example, and for illustrative purposes only. For best results you may consider large and high-quality text-image datasets such as [LAION](https://laion.ai/blog/laion-400-open-dataset/). You may also need to search the hyperparameter space according to the dataset you use.
```bash
export MODEL_NAME="stable-diffusion-v1-5/stable-diffusion-v1-5"
export OUTPUT_DIR="path/to/saved/model"
accelerate launch train_lcm_distill_sd_wds.py \
--pretrained_teacher_model=$MODEL_NAME \
--output_dir=$OUTPUT_DIR \
--mixed_precision=fp16 \
--resolution=512 \
--learning_rate=1e-6 --loss_type="huber" --ema_decay=0.95 --adam_weight_decay=0.0 \
--max_train_steps=1000 \
--max_train_samples=4000000 \
--dataloader_num_workers=8 \
--train_shards_path_or_url="pipe:curl -L -s https://huggingface.co/datasets/laion/conceptual-captions-12m-webdataset/resolve/main/data/{00000..01099}.tar?download=true" \
--validation_steps=200 \
--checkpointing_steps=200 --checkpoints_total_limit=10 \
--train_batch_size=12 \
--gradient_checkpointing --enable_xformers_memory_efficient_attention \
--gradient_accumulation_steps=1 \
--use_8bit_adam \
--resume_from_checkpoint=latest \
--report_to=wandb \
--seed=453645634 \
--push_to_hub
```
## LCM-LoRA
Instead of fine-tuning the full model, we can also just train a LoRA that can be injected into any SDXL model.
### Example
The following uses the [Conceptual Captions 12M (CC12M) dataset](https://github.com/google-research-datasets/conceptual-12m) as an example. For best results you may consider large and high-quality text-image datasets such as [LAION](https://laion.ai/blog/laion-400-open-dataset/).
```bash
export MODEL_NAME="stable-diffusion-v1-5/stable-diffusion-v1-5"
export OUTPUT_DIR="path/to/saved/model"
accelerate launch train_lcm_distill_lora_sd_wds.py \
--pretrained_teacher_model=$MODEL_NAME \
--output_dir=$OUTPUT_DIR \
--mixed_precision=fp16 \
--resolution=512 \
--lora_rank=64 \
--learning_rate=1e-4 --loss_type="huber" --adam_weight_decay=0.0 \
--max_train_steps=1000 \
--max_train_samples=4000000 \
--dataloader_num_workers=8 \
--train_shards_path_or_url="pipe:curl -L -s https://huggingface.co/datasets/laion/conceptual-captions-12m-webdataset/resolve/main/data/{00000..01099}.tar?download=true" \
--validation_steps=200 \
--checkpointing_steps=200 --checkpoints_total_limit=10 \
--train_batch_size=12 \
--gradient_checkpointing --enable_xformers_memory_efficient_attention \
--gradient_accumulation_steps=1 \
--use_8bit_adam \
--resume_from_checkpoint=latest \
--report_to=wandb \
--seed=453645634 \
--push_to_hub \
``` | diffusers/examples/consistency_distillation/README.md/0 | {
"file_path": "diffusers/examples/consistency_distillation/README.md",
"repo_id": "diffusers",
"token_count": 1523
} |
# DreamBooth training example for Stable Diffusion 3 (SD3)
[DreamBooth](https://arxiv.org/abs/2208.12242) is a method to personalize text2image models like stable diffusion given just a few (3~5) images of a subject.
The `train_dreambooth_sd3.py` script shows how to implement the training procedure and adapt it for [Stable Diffusion 3](https://huggingface.co/papers/2403.03206). We also provide a LoRA implementation in the `train_dreambooth_lora_sd3.py` script.
> [!NOTE]
> As the model is gated, before using it with diffusers you first need to go to the [Stable Diffusion 3 Medium Hugging Face page](https://huggingface.co/stabilityai/stable-diffusion-3-medium-diffusers), fill in the form and accept the gate. Once you are in, you need to log in so that your system knows you’ve accepted the gate. Use the command below to log in:
```bash
huggingface-cli login
```
This will also allow us to push the trained model parameters to the Hugging Face Hub platform.
## Running locally with PyTorch
### Installing the dependencies
Before running the scripts, make sure to install the library's training dependencies:
**Important**
To make sure you can successfully run the latest versions of the example scripts, we highly recommend **installing from source** and keeping the install up to date as we update the example scripts frequently and install some example-specific requirements. To do this, execute the following steps in a new virtual environment:
```bash
git clone https://github.com/huggingface/diffusers
cd diffusers
pip install -e .
```
Then cd in the `examples/dreambooth` folder and run
```bash
pip install -r requirements_sd3.txt
```
And initialize an [🤗Accelerate](https://github.com/huggingface/accelerate/) environment with:
```bash
accelerate config
```
Or for a default accelerate configuration without answering questions about your environment
```bash
accelerate config default
```
Or if your environment doesn't support an interactive shell (e.g., a notebook)
```python
from accelerate.utils import write_basic_config
write_basic_config()
```
When running `accelerate config`, if we specify torch compile mode to True there can be dramatic speedups.
Note also that we use PEFT library as backend for LoRA training, make sure to have `peft>=0.6.0` installed in your environment.
### Dog toy example
Now let's get our dataset. For this example we will use some dog images: https://huggingface.co/datasets/diffusers/dog-example.
Let's first download it locally:
```python
from huggingface_hub import snapshot_download
local_dir = "./dog"
snapshot_download(
"diffusers/dog-example",
local_dir=local_dir, repo_type="dataset",
ignore_patterns=".gitattributes",
)
```
This will also allow us to push the trained LoRA parameters to the Hugging Face Hub platform.
Now, we can launch training using:
```bash
export MODEL_NAME="stabilityai/stable-diffusion-3-medium-diffusers"
export INSTANCE_DIR="dog"
export OUTPUT_DIR="trained-sd3"
accelerate launch train_dreambooth_sd3.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--instance_data_dir=$INSTANCE_DIR \
--output_dir=$OUTPUT_DIR \
--mixed_precision="fp16" \
--instance_prompt="a photo of sks dog" \
--resolution=1024 \
--train_batch_size=1 \
--gradient_accumulation_steps=4 \
--learning_rate=1e-4 \
--report_to="wandb" \
--lr_scheduler="constant" \
--lr_warmup_steps=0 \
--max_train_steps=500 \
--validation_prompt="A photo of sks dog in a bucket" \
--validation_epochs=25 \
--seed="0" \
--push_to_hub
```
To better track our training experiments, we're using the following flags in the command above:
* `report_to="wandb` will ensure the training runs are tracked on [Weights and Biases](https://wandb.ai/site). To use it, be sure to install `wandb` with `pip install wandb`. Don't forget to call `wandb login <your_api_key>` before training if you haven't done it before.
* `validation_prompt` and `validation_epochs` to allow the script to do a few validation inference runs. This allows us to qualitatively check if the training is progressing as expected.
> [!NOTE]
> If you want to train using long prompts with the T5 text encoder, you can use `--max_sequence_length` to set the token limit. The default is 77, but it can be increased to as high as 512. Note that this will use more resources and may slow down the training in some cases.
> [!TIP]
> You can pass `--use_8bit_adam` to reduce the memory requirements of training. Make sure to install `bitsandbytes` if you want to do so.
## LoRA + DreamBooth
[LoRA](https://huggingface.co/docs/peft/conceptual_guides/adapter#low-rank-adaptation-lora) is a popular parameter-efficient fine-tuning technique that allows you to achieve full-finetuning like performance but with a fraction of learnable parameters.
Note also that we use PEFT library as backend for LoRA training, make sure to have `peft>=0.6.0` installed in your environment.
To perform DreamBooth with LoRA, run:
```bash
export MODEL_NAME="stabilityai/stable-diffusion-3-medium-diffusers"
export INSTANCE_DIR="dog"
export OUTPUT_DIR="trained-sd3-lora"
accelerate launch train_dreambooth_lora_sd3.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--instance_data_dir=$INSTANCE_DIR \
--output_dir=$OUTPUT_DIR \
--mixed_precision="fp16" \
--instance_prompt="a photo of sks dog" \
--resolution=512 \
--train_batch_size=1 \
--gradient_accumulation_steps=4 \
--learning_rate=4e-4 \
--report_to="wandb" \
--lr_scheduler="constant" \
--lr_warmup_steps=0 \
--max_train_steps=500 \
--validation_prompt="A photo of sks dog in a bucket" \
--validation_epochs=25 \
--seed="0" \
--push_to_hub
```
### Targeting Specific Blocks & Layers
As image generation models get bigger & more powerful, more fine-tuners come to find that training only part of the
transformer blocks (sometimes as little as two) can be enough to get great results.
In some cases, it can be even better to maintain some of the blocks/layers frozen.
For **SD3.5-Large** specifically, you may find this information useful (taken from: [Stable Diffusion 3.5 Large Fine-tuning Tutorial](https://stabilityai.notion.site/Stable-Diffusion-3-5-Large-Fine-tuning-Tutorial-11a61cdcd1968027a15bdbd7c40be8c6#12461cdcd19680788a23c650dab26b93):
> [!NOTE]
> A commonly believed heuristic that we verified once again during the construction of the SD3.5 family of models is that later/higher layers (i.e. `30 - 37`)* impact tertiary details more heavily. Conversely, earlier layers (i.e. `12 - 24` )* influence the overall composition/primary form more.
> So, freezing other layers/targeting specific layers is a viable approach.
> `*`These suggested layers are speculative and not 100% guaranteed. The tips here are more or less a general idea for next steps.
> **Photorealism**
> In preliminary testing, we observed that freezing the last few layers of the architecture significantly improved model training when using a photorealistic dataset, preventing detail degradation introduced by small dataset from happening.
> **Anatomy preservation**
> To dampen any possible degradation of anatomy, training only the attention layers and **not** the adaptive linear layers could help. For reference, below is one of the transformer blocks.
We've added `--lora_layers` and `--lora_blocks` to make LoRA training modules configurable.
- with `--lora_blocks` you can specify the block numbers for training. E.g. passing -
```diff
--lora_blocks "12,13,14,15,16,17,18,19,20,21,22,23,24,30,31,32,33,34,35,36,37"
```
will trigger LoRA training of transformer blocks 12-24 and 30-37. By default, all blocks are trained.
- with `--lora_layers` you can specify the types of layers you wish to train.
By default, the trained layers are -
`attn.add_k_proj,attn.add_q_proj,attn.add_v_proj,attn.to_add_out,attn.to_k,attn.to_out.0,attn.to_q,attn.to_v`
If you wish to have a leaner LoRA / train more blocks over layers you could pass -
```diff
+ --lora_layers attn.to_k,attn.to_q,attn.to_v,attn.to_out.0
```
This will reduce LoRA size by roughly 50% for the same rank compared to the default.
However, if you're after compact LoRAs, it's our impression that maintaining the default setting for `--lora_layers` and
freezing some of the early & blocks is usually better.
### Text Encoder Training
Alongside the transformer, LoRA fine-tuning of the CLIP text encoders is now also supported.
To do so, just specify `--train_text_encoder` while launching training. Please keep the following points in mind:
> [!NOTE]
> SD3 has three text encoders (CLIP L/14, OpenCLIP bigG/14, and T5-v1.1-XXL).
By enabling `--train_text_encoder`, LoRA fine-tuning of both **CLIP encoders** is performed. At the moment, T5 fine-tuning is not supported and weights remain frozen when text encoder training is enabled.
To perform DreamBooth LoRA with text-encoder training, run:
```bash
export MODEL_NAME="stabilityai/stable-diffusion-3-medium-diffusers"
export OUTPUT_DIR="trained-sd3-lora"
accelerate launch train_dreambooth_lora_sd3.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--output_dir=$OUTPUT_DIR \
--dataset_name="Norod78/Yarn-art-style" \
--instance_prompt="a photo of TOK yarn art dog" \
--resolution=1024 \
--train_batch_size=1 \
--train_text_encoder\
--gradient_accumulation_steps=1 \
--optimizer="prodigy"\
--learning_rate=1.0 \
--text_encoder_lr=1.0 \
--report_to="wandb" \
--lr_scheduler="constant" \
--lr_warmup_steps=0 \
--max_train_steps=1500 \
--rank=32 \
--seed="0" \
--push_to_hub
```
## Other notes
1. We default to the "logit_normal" weighting scheme for the loss following the SD3 paper. Thanks to @bghira for helping us discover that for other weighting schemes supported from the training script, training may incur numerical instabilities.
2. Thanks to `bghira`, `JinxuXiang`, and `bendanzzc` for helping us discover a bug in how VAE encoding was being done previously. This has been fixed in [#8917](https://github.com/huggingface/diffusers/pull/8917).
3. Additionally, we now have the option to control if we want to apply preconditioning to the model outputs via a `--precondition_outputs` CLI arg. It affects how the model `target` is calculated as well. | diffusers/examples/dreambooth/README_sd3.md/0 | {
"file_path": "diffusers/examples/dreambooth/README_sd3.md",
"repo_id": "diffusers",
"token_count": 3204
} |
## Diffusion-based Policy Learning for RL
`diffusion_policy` implements [Diffusion Policy](https://diffusion-policy.cs.columbia.edu/), a diffusion model that predicts robot action sequences in reinforcement learning tasks.
This example implements a robot control model for pushing a T-shaped block into a target area. The model takes in current state observations as input, and outputs a trajectory of subsequent steps to follow.
To execute the script, run `diffusion_policy.py`
## Diffuser Locomotion
These examples show how to run [Diffuser](https://arxiv.org/abs/2205.09991) in Diffusers.
There are two ways to use the script, `run_diffuser_locomotion.py`.
The key option is a change of the variable `n_guide_steps`.
When `n_guide_steps=0`, the trajectories are sampled from the diffusion model, but not fine-tuned to maximize reward in the environment.
By default, `n_guide_steps=2` to match the original implementation.
You will need some RL specific requirements to run the examples:
```sh
pip install -f https://download.pytorch.org/whl/torch_stable.html \
free-mujoco-py \
einops \
gym==0.24.1 \
protobuf==3.20.1 \
git+https://github.com/rail-berkeley/d4rl.git \
mediapy \
Pillow==9.0.0
```
| diffusers/examples/reinforcement_learning/README.md/0 | {
"file_path": "diffusers/examples/reinforcement_learning/README.md",
"repo_id": "diffusers",
"token_count": 465
} |
# Distillation for quantization on Textual Inversion models to personalize text2image
[Textual inversion](https://arxiv.org/abs/2208.01618) is a method to personalize text2image models like stable diffusion on your own images._By using just 3-5 images new concepts can be taught to Stable Diffusion and the model personalized on your own images_
The `textual_inversion.py` script shows how to implement the training procedure and adapt it for stable diffusion.
We have enabled distillation for quantization in `textual_inversion.py` to do quantization aware training as well as distillation on the model generated by Textual Inversion method.
## Installing the dependencies
Before running the scripts, make sure to install the library's training dependencies:
```bash
pip install -r requirements.txt
```
## Prepare Datasets
One picture which is from the huggingface datasets [sd-concepts-library/dicoo2](https://huggingface.co/sd-concepts-library/dicoo2) is needed, and save it to the `./dicoo` directory. The picture is shown below:
<a href="https://huggingface.co/sd-concepts-library/dicoo2/blob/main/concept_images/1.jpeg">
<img src="https://huggingface.co/sd-concepts-library/dicoo2/resolve/main/concept_images/1.jpeg" width = "300" height="300">
</a>
## Get a FP32 Textual Inversion model
Use the following command to fine-tune the Stable Diffusion model on the above dataset to obtain the FP32 Textual Inversion model.
```bash
export MODEL_NAME="CompVis/stable-diffusion-v1-4"
export DATA_DIR="./dicoo"
accelerate launch textual_inversion.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--train_data_dir=$DATA_DIR \
--learnable_property="object" \
--placeholder_token="<dicoo>" --initializer_token="toy" \
--resolution=512 \
--train_batch_size=1 \
--gradient_accumulation_steps=4 \
--max_train_steps=3000 \
--learning_rate=5.0e-04 --scale_lr \
--lr_scheduler="constant" \
--lr_warmup_steps=0 \
--output_dir="dicoo_model"
```
## Do distillation for quantization
Distillation for quantization is a method that combines [intermediate layer knowledge distillation](https://github.com/intel/neural-compressor/blob/master/docs/source/distillation.md#intermediate-layer-knowledge-distillation) and [quantization aware training](https://github.com/intel/neural-compressor/blob/master/docs/source/quantization.md#quantization-aware-training) in the same training process to improve the performance of the quantized model. Provided a FP32 model, the distillation for quantization approach will take this model itself as the teacher model and transfer the knowledges of the specified layers to the student model, i.e. quantized version of the FP32 model, during the quantization aware training process.
Once you have the FP32 Textual Inversion model, the following command will take the FP32 Textual Inversion model as input to do distillation for quantization and generate the INT8 Textual Inversion model.
```bash
export FP32_MODEL_NAME="./dicoo_model"
export DATA_DIR="./dicoo"
accelerate launch textual_inversion.py \
--pretrained_model_name_or_path=$FP32_MODEL_NAME \
--train_data_dir=$DATA_DIR \
--use_ema --learnable_property="object" \
--placeholder_token="<dicoo>" --initializer_token="toy" \
--resolution=512 \
--train_batch_size=1 \
--gradient_accumulation_steps=4 \
--max_train_steps=300 \
--learning_rate=5.0e-04 --max_grad_norm=3 \
--lr_scheduler="constant" \
--lr_warmup_steps=0 \
--output_dir="int8_model" \
--do_quantization --do_distillation --verify_loading
```
After the distillation for quantization process, the quantized UNet would be 4 times smaller (3279MB -> 827MB).
## Inference
Once you have trained a INT8 model with the above command, the inference can be done simply using the `text2images.py` script. Make sure to include the `placeholder_token` in your prompt.
```bash
export INT8_MODEL_NAME="./int8_model"
python text2images.py \
--pretrained_model_name_or_path=$INT8_MODEL_NAME \
--caption "a lovely <dicoo> in red dress and hat, in the snowly and brightly night, with many brighly buildings." \
--images_num 4
```
Here is the comparison of images generated by the FP32 model (left) and INT8 model (right) respectively:
<p float="left">
<img src="https://huggingface.co/datasets/Intel/textual_inversion_dicoo_dfq/resolve/main/FP32.png" width = "300" height = "300" alt="FP32" align=center />
<img src="https://huggingface.co/datasets/Intel/textual_inversion_dicoo_dfq/resolve/main/INT8.png" width = "300" height = "300" alt="INT8" align=center />
</p>
| diffusers/examples/research_projects/intel_opts/textual_inversion_dfq/README.md/0 | {
"file_path": "diffusers/examples/research_projects/intel_opts/textual_inversion_dfq/README.md",
"repo_id": "diffusers",
"token_count": 1443
} |
# Multi Subject Dreambooth for Inpainting Models
Please note that this project is not actively maintained. However, you can open an issue and tag @gzguevara.
[DreamBooth](https://arxiv.org/abs/2208.12242) is a method to personalize text2image models like stable diffusion given just a few(3~5) images of a subject. This project consists of **two parts**. Training Stable Diffusion for inpainting requieres prompt-image-mask pairs. The Unet of inpainiting models have 5 additional input channels (4 for the encoded masked-image and 1 for the mask itself).
**The first part**, the `multi_inpaint_dataset.ipynb` notebook, demonstrates how make a 🤗 dataset of prompt-image-mask pairs. You can, however, skip the first part and move straight to the second part with the example datasets in this project. ([cat toy dataset masked](https://huggingface.co/datasets/gzguevara/cat_toy_masked), [mr. potato head dataset masked](https://huggingface.co/datasets/gzguevara/mr_potato_head_masked))
**The second part**, the `train_multi_subject_inpainting.py` training script, demonstrates how to implement a training procedure for one or more subjects and adapt it for stable diffusion for inpainting.
## 1. Data Collection: Make Prompt-Image-Mask Pairs
Earlier training scripts have provided approaches like random masking for the training images. This project provides a notebook for more precise mask setting.
The notebook can be found here: [](https://colab.research.google.com/drive/1JNEASI_B7pLW1srxhgln6nM0HoGAQT32?usp=sharing)
The `multi_inpaint_dataset.ipynb` notebook, takes training & validation images, on which the user draws masks and provides prompts to make a prompt-image-mask pairs. This ensures that during training, the loss is computed on the area masking the object of interest, rather than on random areas. Moreover, the `multi_inpaint_dataset.ipynb` notebook allows you to build a validation dataset with corresponding masks for monitoring the training process. Example below:

You can build multiple datasets for every subject and upload them to the 🤗 hub. Later, when launching the training script you can indicate the paths of the datasets, on which you would like to finetune Stable Diffusion for inpaining.
## 2. Train Multi Subject Dreambooth for Inpainting
### 2.1. Setting The Training Configuration
Before launching the training script, make sure to select the inpainting the target model, the output directory and the 🤗 datasets.
```bash
export MODEL_NAME="runwayml/stable-diffusion-inpainting"
export OUTPUT_DIR="path-to-save-model"
export DATASET_1="gzguevara/mr_potato_head_masked"
export DATASET_2="gzguevara/cat_toy_masked"
... # Further paths to 🤗 datasets
```
### 2.2. Launching The Training Script
```bash
accelerate launch train_multi_subject_dreambooth_inpaint.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--instance_data_dir $DATASET_1 $DATASET_2 \
--output_dir=$OUTPUT_DIR \
--resolution=512 \
--train_batch_size=1 \
--gradient_accumulation_steps=2 \
--learning_rate=3e-6 \
--max_train_steps=500 \
--report_to_wandb
```
### 2.3. Fine-tune text encoder with the UNet.
The script also allows to fine-tune the `text_encoder` along with the `unet`. It's been observed experimentally that fine-tuning `text_encoder` gives much better results especially on faces.
Pass the `--train_text_encoder` argument to the script to enable training `text_encoder`.
___Note: Training text encoder requires more memory, with this option the training won't fit on 16GB GPU. It needs at least 24GB VRAM.___
```bash
accelerate launch train_multi_subject_dreambooth_inpaint.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--instance_data_dir $DATASET_1 $DATASET_2 \
--output_dir=$OUTPUT_DIR \
--resolution=512 \
--train_batch_size=1 \
--gradient_accumulation_steps=2 \
--learning_rate=2e-6 \
--max_train_steps=500 \
--report_to_wandb \
--train_text_encoder
```
## 3. Results
A [](https://wandb.ai/gzguevara/uncategorized/reports/Multi-Subject-Dreambooth-for-Inpainting--Vmlldzo2MzY5NDQ4?accessToken=y0nya2d7baguhbryxaikbfr1203amvn1jsmyl07vk122mrs7tnph037u1nqgse8t) is provided showing the training progress by every 50 steps. Note, the reported weights & baises run was performed on a A100 GPU with the following stetting:
```bash
accelerate launch train_multi_subject_dreambooth_inpaint.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--instance_data_dir $DATASET_1 $DATASET_2 \
--output_dir=$OUTPUT_DIR \
--resolution=512 \
--train_batch_size=10 \
--gradient_accumulation_steps=1 \
--learning_rate=1e-6 \
--max_train_steps=500 \
--report_to_wandb \
--train_text_encoder
```
Here you can see the target objects on my desk and next to my plant:

| diffusers/examples/research_projects/multi_subject_dreambooth_inpainting/README.md/0 | {
"file_path": "diffusers/examples/research_projects/multi_subject_dreambooth_inpainting/README.md",
"repo_id": "diffusers",
"token_count": 1665
} |
## Training examples
Creating a training image set is [described in a different document](https://huggingface.co/docs/datasets/image_process#image-datasets).
### Installing the dependencies
Before running the scripts, make sure to install the library's training dependencies:
**Important**
To make sure you can successfully run the latest versions of the example scripts, we highly recommend **installing from source** and keeping the install up to date as we update the example scripts frequently and install some example-specific requirements. To do this, execute the following steps in a new virtual environment:
```bash
git clone https://github.com/huggingface/diffusers
cd diffusers
pip install .
```
Then cd in the example folder and run
```bash
pip install -r requirements.txt
```
And initialize an [🤗Accelerate](https://github.com/huggingface/accelerate/) environment with:
```bash
accelerate config
```
#### Use ONNXRuntime to accelerate training
In order to leverage onnxruntime to accelerate training, please use train_unconditional_ort.py
The command to train a DDPM UNet model on the Oxford Flowers dataset with onnxruntime:
```bash
accelerate launch train_unconditional.py \
--dataset_name="huggan/flowers-102-categories" \
--resolution=64 --center_crop --random_flip \
--output_dir="ddpm-ema-flowers-64" \
--use_ema \
--train_batch_size=16 \
--num_epochs=1 \
--gradient_accumulation_steps=1 \
--learning_rate=1e-4 \
--lr_warmup_steps=500 \
--mixed_precision=fp16
```
Please contact Prathik Rao (prathikr), Sunghoon Choi (hanbitmyths), Ashwini Khade (askhade), or Peng Wang (pengwa) on github with any questions.
| diffusers/examples/research_projects/onnxruntime/unconditional_image_generation/README.md/0 | {
"file_path": "diffusers/examples/research_projects/onnxruntime/unconditional_image_generation/README.md",
"repo_id": "diffusers",
"token_count": 500
} |
# Stable Diffusion text-to-image fine-tuning using PyTorch/XLA
The `train_text_to_image_xla.py` script shows how to fine-tune stable diffusion model on TPU devices using PyTorch/XLA.
It has been tested on v4 and v5p TPU versions. Training code has been tested on multi-host.
This script implements Distributed Data Parallel using GSPMD feature in XLA compiler
where we shard the input batches over the TPU devices.
As of 10-31-2024, these are some expected step times.
| accelerator | global batch size | step time (seconds) |
| ----------- | ----------------- | --------- |
| v5p-512 | 16384 | 1.01 |
| v5p-256 | 8192 | 1.01 |
| v5p-128 | 4096 | 1.0 |
| v5p-64 | 2048 | 1.01 |
## Create TPU
To create a TPU on Google Cloud first set these environment variables:
```bash
export TPU_NAME=<tpu-name>
export PROJECT_ID=<project-id>
export ZONE=<google-cloud-zone>
export ACCELERATOR_TYPE=<accelerator type like v5p-8>
export RUNTIME_VERSION=<runtime version like v2-alpha-tpuv5 for v5p>
```
Then run the create TPU command:
```bash
gcloud alpha compute tpus tpu-vm create ${TPU_NAME} --project ${PROJECT_ID}
--zone ${ZONE} --accelerator-type ${ACCELERATOR_TYPE} --version ${RUNTIME_VERSION}
--reserved
```
You can also use other ways to reserve TPUs like GKE or queued resources.
## Setup TPU environment
Install PyTorch and PyTorch/XLA nightly versions:
```bash
gcloud compute tpus tpu-vm ssh ${TPU_NAME} \
--project=${PROJECT_ID} --zone=${ZONE} --worker=all \
--command='
pip3 install --pre torch==2.6.0.dev20241031+cpu torchvision --index-url https://download.pytorch.org/whl/nightly/cpu
pip3 install "torch_xla[tpu] @ https://storage.googleapis.com/pytorch-xla-releases/wheels/tpuvm/torch_xla-2.6.0.dev20241031.cxx11-cp310-cp310-linux_x86_64.whl" -f https://storage.googleapis.com/libtpu-releases/index.html
pip install torch_xla[pallas] -f https://storage.googleapis.com/jax-releases/jax_nightly_releases.html -f https://storage.googleapis.com/jax-releases/jaxlib_nightly_releases.html
'
```
Verify that PyTorch and PyTorch/XLA were installed correctly:
```bash
gcloud compute tpus tpu-vm ssh ${TPU_NAME} \
--project ${PROJECT_ID} --zone ${ZONE} --worker=all \
--command='python3 -c "import torch; import torch_xla;"'
```
Install dependencies:
```bash
gcloud compute tpus tpu-vm ssh ${TPU_NAME} \
--project=${PROJECT_ID} --zone=${ZONE} --worker=all \
--command='
git clone https://github.com/huggingface/diffusers.git
cd diffusers
git checkout main
cd examples/research_projects/pytorch_xla
pip3 install -r requirements.txt
pip3 install pillow --upgrade
cd ../../..
pip3 install .'
```
## Run the training job
### Authenticate
Run the following command to authenticate your token.
```bash
huggingface-cli login
```
This script only trains the unet part of the network. The VAE and text encoder
are fixed.
```bash
gcloud compute tpus tpu-vm ssh ${TPU_NAME} \
--project=${PROJECT_ID} --zone=${ZONE} --worker=all \
--command='
export XLA_DISABLE_FUNCTIONALIZATION=0
export PROFILE_DIR=/tmp/
export CACHE_DIR=/tmp/
export DATASET_NAME=lambdalabs/naruto-blip-captions
export PER_HOST_BATCH_SIZE=32 # This is known to work on TPU v4. Can set this to 64 for TPU v5p
export TRAIN_STEPS=50
export OUTPUT_DIR=/tmp/trained-model/
python diffusers/examples/research_projects/pytorch_xla/train_text_to_image_xla.py --pretrained_model_name_or_path=stabilityai/stable-diffusion-2-base --dataset_name=$DATASET_NAME --resolution=512 --center_crop --random_flip --train_batch_size=$PER_HOST_BATCH_SIZE --max_train_steps=$TRAIN_STEPS --learning_rate=1e-06 --mixed_precision=bf16 --profile_duration=80000 --output_dir=$OUTPUT_DIR --dataloader_num_workers=8 --loader_prefetch_size=4 --device_prefetch_size=4'
```
Pass `--print_loss` if you would like to see the loss printed at every step. Be aware that printing the loss at every step disrupts the optimized flow execution, thus the step time will be longer.
### Environment Envs Explained
* `XLA_DISABLE_FUNCTIONALIZATION`: To optimize the performance for AdamW optimizer.
* `PROFILE_DIR`: Specify where to put the profiling results.
* `CACHE_DIR`: Directory to store XLA compiled graphs for persistent caching.
* `DATASET_NAME`: Dataset to train the model.
* `PER_HOST_BATCH_SIZE`: Size of the batch to load per CPU host. For e.g. for a v5p-16 with 2 CPU hosts, the global batch size will be 2xPER_HOST_BATCH_SIZE. The input batch is sharded along the batch axis.
* `TRAIN_STEPS`: Total number of training steps to run the training for.
* `OUTPUT_DIR`: Directory to store the fine-tuned model.
## Run inference using the output model
To run inference using the output, you can simply load the model and pass it
input prompts. The first pass will compile the graph and takes longer with the following passes running much faster.
```bash
export CACHE_DIR=/tmp/
```
```python
import torch
import os
import sys
import numpy as np
import torch_xla.core.xla_model as xm
from time import time
from diffusers import StableDiffusionPipeline
import torch_xla.runtime as xr
CACHE_DIR = os.environ.get("CACHE_DIR", None)
if CACHE_DIR:
xr.initialize_cache(CACHE_DIR, readonly=False)
def main():
device = xm.xla_device()
model_path = "jffacevedo/pxla_trained_model"
pipe = StableDiffusionPipeline.from_pretrained(
model_path,
torch_dtype=torch.bfloat16
)
pipe.to(device)
prompt = ["A naruto with green eyes and red legs."]
start = time()
print("compiling...")
image = pipe(prompt, num_inference_steps=30, guidance_scale=7.5).images[0]
print(f"compile time: {time() - start}")
print("generate...")
start = time()
image = pipe(prompt, num_inference_steps=30, guidance_scale=7.5).images[0]
print(f"generation time (after compile) : {time() - start}")
image.save("naruto.png")
if __name__ == '__main__':
main()
```
Expected Results:
```bash
compiling...
100%|███████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 30/30 [10:03<00:00, 20.10s/it]
compile time: 720.656970500946
generate...
100%|███████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 30/30 [00:01<00:00, 17.65it/s]
generation time (after compile) : 1.8461642265319824 | diffusers/examples/research_projects/pytorch_xla/training/text_to_image/README.md/0 | {
"file_path": "diffusers/examples/research_projects/pytorch_xla/training/text_to_image/README.md",
"repo_id": "diffusers",
"token_count": 2275
} |
#!/usr/bin/env python
# coding=utf-8
# Copyright 2025 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import logging
import os
import shutil
import sys
import tempfile
from diffusers import DiffusionPipeline, UNet2DConditionModel # noqa: E402
sys.path.append("..")
from test_examples_utils import ExamplesTestsAccelerate, run_command # noqa: E402
logging.basicConfig(level=logging.DEBUG)
logger = logging.getLogger()
stream_handler = logging.StreamHandler(sys.stdout)
logger.addHandler(stream_handler)
class TextToImage(ExamplesTestsAccelerate):
def test_text_to_image(self):
with tempfile.TemporaryDirectory() as tmpdir:
test_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path hf-internal-testing/tiny-stable-diffusion-pipe
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 2
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
""".split()
run_command(self._launch_args + test_args)
# save_pretrained smoke test
self.assertTrue(os.path.isfile(os.path.join(tmpdir, "unet", "diffusion_pytorch_model.safetensors")))
self.assertTrue(os.path.isfile(os.path.join(tmpdir, "scheduler", "scheduler_config.json")))
def test_text_to_image_checkpointing(self):
pretrained_model_name_or_path = "hf-internal-testing/tiny-stable-diffusion-pipe"
prompt = "a prompt"
with tempfile.TemporaryDirectory() as tmpdir:
# Run training script with checkpointing
# max_train_steps == 4, checkpointing_steps == 2
# Should create checkpoints at steps 2, 4
initial_run_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path {pretrained_model_name_or_path}
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 4
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
--checkpointing_steps=2
--seed=0
""".split()
run_command(self._launch_args + initial_run_args)
pipe = DiffusionPipeline.from_pretrained(tmpdir, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# check checkpoint directories exist
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-2", "checkpoint-4"},
)
# check can run an intermediate checkpoint
unet = UNet2DConditionModel.from_pretrained(tmpdir, subfolder="checkpoint-2/unet")
pipe = DiffusionPipeline.from_pretrained(pretrained_model_name_or_path, unet=unet, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# Remove checkpoint 2 so that we can check only later checkpoints exist after resuming
shutil.rmtree(os.path.join(tmpdir, "checkpoint-2"))
# Run training script for 2 total steps resuming from checkpoint 4
resume_run_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path {pretrained_model_name_or_path}
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 2
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
--checkpointing_steps=1
--resume_from_checkpoint=checkpoint-4
--seed=0
""".split()
run_command(self._launch_args + resume_run_args)
# check can run new fully trained pipeline
pipe = DiffusionPipeline.from_pretrained(tmpdir, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# no checkpoint-2 -> check old checkpoints do not exist
# check new checkpoints exist
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-4", "checkpoint-5"},
)
def test_text_to_image_checkpointing_use_ema(self):
pretrained_model_name_or_path = "hf-internal-testing/tiny-stable-diffusion-pipe"
prompt = "a prompt"
with tempfile.TemporaryDirectory() as tmpdir:
# Run training script with checkpointing
# max_train_steps == 4, checkpointing_steps == 2
# Should create checkpoints at steps 2, 4
initial_run_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path {pretrained_model_name_or_path}
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 4
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
--checkpointing_steps=2
--use_ema
--seed=0
""".split()
run_command(self._launch_args + initial_run_args)
pipe = DiffusionPipeline.from_pretrained(tmpdir, safety_checker=None)
pipe(prompt, num_inference_steps=2)
# check checkpoint directories exist
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-2", "checkpoint-4"},
)
# check can run an intermediate checkpoint
unet = UNet2DConditionModel.from_pretrained(tmpdir, subfolder="checkpoint-2/unet")
pipe = DiffusionPipeline.from_pretrained(pretrained_model_name_or_path, unet=unet, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# Remove checkpoint 2 so that we can check only later checkpoints exist after resuming
shutil.rmtree(os.path.join(tmpdir, "checkpoint-2"))
# Run training script for 2 total steps resuming from checkpoint 4
resume_run_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path {pretrained_model_name_or_path}
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 2
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
--checkpointing_steps=1
--resume_from_checkpoint=checkpoint-4
--use_ema
--seed=0
""".split()
run_command(self._launch_args + resume_run_args)
# check can run new fully trained pipeline
pipe = DiffusionPipeline.from_pretrained(tmpdir, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# no checkpoint-2 -> check old checkpoints do not exist
# check new checkpoints exist
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-4", "checkpoint-5"},
)
def test_text_to_image_checkpointing_checkpoints_total_limit(self):
pretrained_model_name_or_path = "hf-internal-testing/tiny-stable-diffusion-pipe"
prompt = "a prompt"
with tempfile.TemporaryDirectory() as tmpdir:
# Run training script with checkpointing
# max_train_steps == 6, checkpointing_steps == 2, checkpoints_total_limit == 2
# Should create checkpoints at steps 2, 4, 6
# with checkpoint at step 2 deleted
initial_run_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path {pretrained_model_name_or_path}
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 6
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
--checkpointing_steps=2
--checkpoints_total_limit=2
--seed=0
""".split()
run_command(self._launch_args + initial_run_args)
pipe = DiffusionPipeline.from_pretrained(tmpdir, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# check checkpoint directories exist
# checkpoint-2 should have been deleted
self.assertEqual({x for x in os.listdir(tmpdir) if "checkpoint" in x}, {"checkpoint-4", "checkpoint-6"})
def test_text_to_image_checkpointing_checkpoints_total_limit_removes_multiple_checkpoints(self):
pretrained_model_name_or_path = "hf-internal-testing/tiny-stable-diffusion-pipe"
prompt = "a prompt"
with tempfile.TemporaryDirectory() as tmpdir:
# Run training script with checkpointing
# max_train_steps == 4, checkpointing_steps == 2
# Should create checkpoints at steps 2, 4
initial_run_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path {pretrained_model_name_or_path}
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 4
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
--checkpointing_steps=2
--seed=0
""".split()
run_command(self._launch_args + initial_run_args)
pipe = DiffusionPipeline.from_pretrained(tmpdir, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# check checkpoint directories exist
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-2", "checkpoint-4"},
)
# resume and we should try to checkpoint at 6, where we'll have to remove
# checkpoint-2 and checkpoint-4 instead of just a single previous checkpoint
resume_run_args = f"""
examples/text_to_image/train_text_to_image.py
--pretrained_model_name_or_path {pretrained_model_name_or_path}
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 8
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
--checkpointing_steps=2
--resume_from_checkpoint=checkpoint-4
--checkpoints_total_limit=2
--seed=0
""".split()
run_command(self._launch_args + resume_run_args)
pipe = DiffusionPipeline.from_pretrained(tmpdir, safety_checker=None)
pipe(prompt, num_inference_steps=1)
# check checkpoint directories exist
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-6", "checkpoint-8"},
)
class TextToImageSDXL(ExamplesTestsAccelerate):
def test_text_to_image_sdxl(self):
with tempfile.TemporaryDirectory() as tmpdir:
test_args = f"""
examples/text_to_image/train_text_to_image_sdxl.py
--pretrained_model_name_or_path hf-internal-testing/tiny-stable-diffusion-xl-pipe
--dataset_name hf-internal-testing/dummy_image_text_data
--resolution 64
--center_crop
--random_flip
--train_batch_size 1
--gradient_accumulation_steps 1
--max_train_steps 2
--learning_rate 5.0e-04
--scale_lr
--lr_scheduler constant
--lr_warmup_steps 0
--output_dir {tmpdir}
""".split()
run_command(self._launch_args + test_args)
# save_pretrained smoke test
self.assertTrue(os.path.isfile(os.path.join(tmpdir, "unet", "diffusion_pytorch_model.safetensors")))
self.assertTrue(os.path.isfile(os.path.join(tmpdir, "scheduler", "scheduler_config.json")))
| diffusers/examples/text_to_image/test_text_to_image.py/0 | {
"file_path": "diffusers/examples/text_to_image/test_text_to_image.py",
"repo_id": "diffusers",
"token_count": 7427
} |
## Training an unconditional diffusion model
Creating a training image set is [described in a different document](https://huggingface.co/docs/datasets/image_process#image-datasets).
### Installing the dependencies
Before running the scripts, make sure to install the library's training dependencies:
**Important**
To make sure you can successfully run the latest versions of the example scripts, we highly recommend **installing from source** and keeping the install up to date as we update the example scripts frequently and install some example-specific requirements. To do this, execute the following steps in a new virtual environment:
```bash
git clone https://github.com/huggingface/diffusers
cd diffusers
pip install .
```
Then cd in the example folder and run
```bash
pip install -r requirements.txt
```
And initialize an [🤗Accelerate](https://github.com/huggingface/accelerate/) environment with:
```bash
accelerate config
```
### Unconditional Flowers
The command to train a DDPM UNet model on the Oxford Flowers dataset:
```bash
accelerate launch train_unconditional.py \
--dataset_name="huggan/flowers-102-categories" \
--resolution=64 --center_crop --random_flip \
--output_dir="ddpm-ema-flowers-64" \
--train_batch_size=16 \
--num_epochs=100 \
--gradient_accumulation_steps=1 \
--use_ema \
--learning_rate=1e-4 \
--lr_warmup_steps=500 \
--mixed_precision=no \
--push_to_hub
```
An example trained model: https://huggingface.co/anton-l/ddpm-ema-flowers-64
A full training run takes 2 hours on 4xV100 GPUs.
<img src="https://user-images.githubusercontent.com/26864830/180248660-a0b143d0-b89a-42c5-8656-2ebf6ece7e52.png" width="700" />
### Unconditional Pokemon
The command to train a DDPM UNet model on the Pokemon dataset:
```bash
accelerate launch train_unconditional.py \
--dataset_name="huggan/pokemon" \
--resolution=64 --center_crop --random_flip \
--output_dir="ddpm-ema-pokemon-64" \
--train_batch_size=16 \
--num_epochs=100 \
--gradient_accumulation_steps=1 \
--use_ema \
--learning_rate=1e-4 \
--lr_warmup_steps=500 \
--mixed_precision=no \
--push_to_hub
```
An example trained model: https://huggingface.co/anton-l/ddpm-ema-pokemon-64
A full training run takes 2 hours on 4xV100 GPUs.
<img src="https://user-images.githubusercontent.com/26864830/180248200-928953b4-db38-48db-b0c6-8b740fe6786f.png" width="700" />
### Training with multiple GPUs
`accelerate` allows for seamless multi-GPU training. Follow the instructions [here](https://huggingface.co/docs/accelerate/basic_tutorials/launch)
for running distributed training with `accelerate`. Here is an example command:
```bash
accelerate launch --mixed_precision="fp16" --multi_gpu train_unconditional.py \
--dataset_name="huggan/pokemon" \
--resolution=64 --center_crop --random_flip \
--output_dir="ddpm-ema-pokemon-64" \
--train_batch_size=16 \
--num_epochs=100 \
--gradient_accumulation_steps=1 \
--use_ema \
--learning_rate=1e-4 \
--lr_warmup_steps=500 \
--mixed_precision="fp16" \
--logger="wandb"
```
To be able to use Weights and Biases (`wandb`) as a logger you need to install the library: `pip install wandb`.
### Using your own data
To use your own dataset, there are 2 ways:
- you can either provide your own folder as `--train_data_dir`
- or you can upload your dataset to the hub (possibly as a private repo, if you prefer so), and simply pass the `--dataset_name` argument.
Below, we explain both in more detail.
#### Provide the dataset as a folder
If you provide your own folders with images, the script expects the following directory structure:
```bash
data_dir/xxx.png
data_dir/xxy.png
data_dir/[...]/xxz.png
```
In other words, the script will take care of gathering all images inside the folder. You can then run the script like this:
```bash
accelerate launch train_unconditional.py \
--train_data_dir <path-to-train-directory> \
<other-arguments>
```
Internally, the script will use the [`ImageFolder`](https://huggingface.co/docs/datasets/v2.0.0/en/image_process#imagefolder) feature which will automatically turn the folders into 🤗 Dataset objects.
#### Upload your data to the hub, as a (possibly private) repo
It's very easy (and convenient) to upload your image dataset to the hub using the [`ImageFolder`](https://huggingface.co/docs/datasets/v2.0.0/en/image_process#imagefolder) feature available in 🤗 Datasets. Simply do the following:
```python
from datasets import load_dataset
# example 1: local folder
dataset = load_dataset("imagefolder", data_dir="path_to_your_folder")
# example 2: local files (supported formats are tar, gzip, zip, xz, rar, zstd)
dataset = load_dataset("imagefolder", data_files="path_to_zip_file")
# example 3: remote files (supported formats are tar, gzip, zip, xz, rar, zstd)
dataset = load_dataset("imagefolder", data_files="https://download.microsoft.com/download/3/E/1/3E1C3F21-ECDB-4869-8368-6DEBA77B919F/kagglecatsanddogs_3367a.zip")
# example 4: providing several splits
dataset = load_dataset("imagefolder", data_files={"train": ["path/to/file1", "path/to/file2"], "test": ["path/to/file3", "path/to/file4"]})
```
`ImageFolder` will create an `image` column containing the PIL-encoded images.
Next, push it to the hub!
```python
# assuming you have ran the huggingface-cli login command in a terminal
dataset.push_to_hub("name_of_your_dataset")
# if you want to push to a private repo, simply pass private=True:
dataset.push_to_hub("name_of_your_dataset", private=True)
```
and that's it! You can now train your model by simply setting the `--dataset_name` argument to the name of your dataset on the hub.
More on this can also be found in [this blog post](https://huggingface.co/blog/image-search-datasets).
| diffusers/examples/unconditional_image_generation/README.md/0 | {
"file_path": "diffusers/examples/unconditional_image_generation/README.md",
"repo_id": "diffusers",
"token_count": 1939
} |
import argparse
from typing import Dict
import torch
import torch.nn as nn
from diffusers import SparseControlNetModel
KEYS_RENAME_MAPPING = {
".attention_blocks.0": ".attn1",
".attention_blocks.1": ".attn2",
".attn1.pos_encoder": ".pos_embed",
".ff_norm": ".norm3",
".norms.0": ".norm1",
".norms.1": ".norm2",
".temporal_transformer": "",
}
def convert(original_state_dict: Dict[str, nn.Module]) -> Dict[str, nn.Module]:
converted_state_dict = {}
for key in list(original_state_dict.keys()):
renamed_key = key
for new_name, old_name in KEYS_RENAME_MAPPING.items():
renamed_key = renamed_key.replace(new_name, old_name)
converted_state_dict[renamed_key] = original_state_dict.pop(key)
return converted_state_dict
def get_args():
parser = argparse.ArgumentParser()
parser.add_argument("--ckpt_path", type=str, required=True, help="Path to checkpoint")
parser.add_argument("--output_path", type=str, required=True, help="Path to output directory")
parser.add_argument(
"--max_motion_seq_length",
type=int,
default=32,
help="Max motion sequence length supported by the motion adapter",
)
parser.add_argument(
"--conditioning_channels", type=int, default=4, help="Number of channels in conditioning input to controlnet"
)
parser.add_argument(
"--use_simplified_condition_embedding",
action="store_true",
default=False,
help="Whether or not to use simplified condition embedding. When `conditioning_channels==4` i.e. latent inputs, set this to `True`. When `conditioning_channels==3` i.e. image inputs, set this to `False`",
)
parser.add_argument(
"--save_fp16",
action="store_true",
default=False,
help="Whether or not to save model in fp16 precision along with fp32",
)
parser.add_argument(
"--push_to_hub", action="store_true", default=False, help="Whether or not to push saved model to the HF hub"
)
return parser.parse_args()
if __name__ == "__main__":
args = get_args()
state_dict = torch.load(args.ckpt_path, map_location="cpu")
if "state_dict" in state_dict.keys():
state_dict: dict = state_dict["state_dict"]
controlnet = SparseControlNetModel(
conditioning_channels=args.conditioning_channels,
motion_max_seq_length=args.max_motion_seq_length,
use_simplified_condition_embedding=args.use_simplified_condition_embedding,
)
state_dict = convert(state_dict)
controlnet.load_state_dict(state_dict, strict=True)
controlnet.save_pretrained(args.output_path, push_to_hub=args.push_to_hub)
if args.save_fp16:
controlnet = controlnet.to(dtype=torch.float16)
controlnet.save_pretrained(args.output_path, variant="fp16", push_to_hub=args.push_to_hub)
| diffusers/scripts/convert_animatediff_sparsectrl_to_diffusers.py/0 | {
"file_path": "diffusers/scripts/convert_animatediff_sparsectrl_to_diffusers.py",
"repo_id": "diffusers",
"token_count": 1144
} |
import argparse
from contextlib import nullcontext
import safetensors.torch
from accelerate import init_empty_weights
from huggingface_hub import hf_hub_download
from diffusers.utils.import_utils import is_accelerate_available, is_transformers_available
if is_transformers_available():
from transformers import CLIPVisionModelWithProjection
vision = True
else:
vision = False
"""
python scripts/convert_flux_xlabs_ipadapter_to_diffusers.py \
--original_state_dict_repo_id "XLabs-AI/flux-ip-adapter" \
--filename "flux-ip-adapter.safetensors"
--output_path "flux-ip-adapter-hf/"
"""
CTX = init_empty_weights if is_accelerate_available else nullcontext
parser = argparse.ArgumentParser()
parser.add_argument("--original_state_dict_repo_id", default=None, type=str)
parser.add_argument("--filename", default="flux.safetensors", type=str)
parser.add_argument("--checkpoint_path", default=None, type=str)
parser.add_argument("--output_path", type=str)
parser.add_argument("--vision_pretrained_or_path", default="openai/clip-vit-large-patch14", type=str)
args = parser.parse_args()
def load_original_checkpoint(args):
if args.original_state_dict_repo_id is not None:
ckpt_path = hf_hub_download(repo_id=args.original_state_dict_repo_id, filename=args.filename)
elif args.checkpoint_path is not None:
ckpt_path = args.checkpoint_path
else:
raise ValueError(" please provide either `original_state_dict_repo_id` or a local `checkpoint_path`")
original_state_dict = safetensors.torch.load_file(ckpt_path)
return original_state_dict
def convert_flux_ipadapter_checkpoint_to_diffusers(original_state_dict, num_layers):
converted_state_dict = {}
# image_proj
## norm
converted_state_dict["image_proj.norm.weight"] = original_state_dict.pop("ip_adapter_proj_model.norm.weight")
converted_state_dict["image_proj.norm.bias"] = original_state_dict.pop("ip_adapter_proj_model.norm.bias")
## proj
converted_state_dict["image_proj.proj.weight"] = original_state_dict.pop("ip_adapter_proj_model.norm.weight")
converted_state_dict["image_proj.proj.bias"] = original_state_dict.pop("ip_adapter_proj_model.norm.bias")
# double transformer blocks
for i in range(num_layers):
block_prefix = f"ip_adapter.{i}."
# to_k_ip
converted_state_dict[f"{block_prefix}to_k_ip.bias"] = original_state_dict.pop(
f"double_blocks.{i}.processor.ip_adapter_double_stream_k_proj.bias"
)
converted_state_dict[f"{block_prefix}to_k_ip.weight"] = original_state_dict.pop(
f"double_blocks.{i}.processor.ip_adapter_double_stream_k_proj.weight"
)
# to_v_ip
converted_state_dict[f"{block_prefix}to_v_ip.bias"] = original_state_dict.pop(
f"double_blocks.{i}.processor.ip_adapter_double_stream_v_proj.bias"
)
converted_state_dict[f"{block_prefix}to_k_ip.weight"] = original_state_dict.pop(
f"double_blocks.{i}.processor.ip_adapter_double_stream_v_proj.weight"
)
return converted_state_dict
def main(args):
original_ckpt = load_original_checkpoint(args)
num_layers = 19
converted_ip_adapter_state_dict = convert_flux_ipadapter_checkpoint_to_diffusers(original_ckpt, num_layers)
print("Saving Flux IP-Adapter in Diffusers format.")
safetensors.torch.save_file(converted_ip_adapter_state_dict, f"{args.output_path}/model.safetensors")
if vision:
model = CLIPVisionModelWithProjection.from_pretrained(args.vision_pretrained_or_path)
model.save_pretrained(f"{args.output_path}/image_encoder")
if __name__ == "__main__":
main(args)
| diffusers/scripts/convert_flux_xlabs_ipadapter_to_diffusers.py/0 | {
"file_path": "diffusers/scripts/convert_flux_xlabs_ipadapter_to_diffusers.py",
"repo_id": "diffusers",
"token_count": 1463
} |
import json
import os
import torch
from diffusers import UNet1DModel
os.makedirs("hub/hopper-medium-v2/unet/hor32", exist_ok=True)
os.makedirs("hub/hopper-medium-v2/unet/hor128", exist_ok=True)
os.makedirs("hub/hopper-medium-v2/value_function", exist_ok=True)
def unet(hor):
if hor == 128:
down_block_types = ("DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D")
block_out_channels = (32, 128, 256)
up_block_types = ("UpResnetBlock1D", "UpResnetBlock1D")
elif hor == 32:
down_block_types = ("DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D")
block_out_channels = (32, 64, 128, 256)
up_block_types = ("UpResnetBlock1D", "UpResnetBlock1D", "UpResnetBlock1D")
model = torch.load(f"/Users/bglickenhaus/Documents/diffuser/temporal_unet-hopper-mediumv2-hor{hor}.torch")
state_dict = model.state_dict()
config = {
"down_block_types": down_block_types,
"block_out_channels": block_out_channels,
"up_block_types": up_block_types,
"layers_per_block": 1,
"use_timestep_embedding": True,
"out_block_type": "OutConv1DBlock",
"norm_num_groups": 8,
"downsample_each_block": False,
"in_channels": 14,
"out_channels": 14,
"extra_in_channels": 0,
"time_embedding_type": "positional",
"flip_sin_to_cos": False,
"freq_shift": 1,
"sample_size": 65536,
"mid_block_type": "MidResTemporalBlock1D",
"act_fn": "mish",
}
hf_value_function = UNet1DModel(**config)
print(f"length of state dict: {len(state_dict.keys())}")
print(f"length of value function dict: {len(hf_value_function.state_dict().keys())}")
mapping = dict(zip(model.state_dict().keys(), hf_value_function.state_dict().keys()))
for k, v in mapping.items():
state_dict[v] = state_dict.pop(k)
hf_value_function.load_state_dict(state_dict)
torch.save(hf_value_function.state_dict(), f"hub/hopper-medium-v2/unet/hor{hor}/diffusion_pytorch_model.bin")
with open(f"hub/hopper-medium-v2/unet/hor{hor}/config.json", "w") as f:
json.dump(config, f)
def value_function():
config = {
"in_channels": 14,
"down_block_types": ("DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D"),
"up_block_types": (),
"out_block_type": "ValueFunction",
"mid_block_type": "ValueFunctionMidBlock1D",
"block_out_channels": (32, 64, 128, 256),
"layers_per_block": 1,
"downsample_each_block": True,
"sample_size": 65536,
"out_channels": 14,
"extra_in_channels": 0,
"time_embedding_type": "positional",
"use_timestep_embedding": True,
"flip_sin_to_cos": False,
"freq_shift": 1,
"norm_num_groups": 8,
"act_fn": "mish",
}
model = torch.load("/Users/bglickenhaus/Documents/diffuser/value_function-hopper-mediumv2-hor32.torch")
state_dict = model
hf_value_function = UNet1DModel(**config)
print(f"length of state dict: {len(state_dict.keys())}")
print(f"length of value function dict: {len(hf_value_function.state_dict().keys())}")
mapping = dict(zip(state_dict.keys(), hf_value_function.state_dict().keys()))
for k, v in mapping.items():
state_dict[v] = state_dict.pop(k)
hf_value_function.load_state_dict(state_dict)
torch.save(hf_value_function.state_dict(), "hub/hopper-medium-v2/value_function/diffusion_pytorch_model.bin")
with open("hub/hopper-medium-v2/value_function/config.json", "w") as f:
json.dump(config, f)
if __name__ == "__main__":
unet(32)
# unet(128)
value_function()
| diffusers/scripts/convert_models_diffuser_to_diffusers.py/0 | {
"file_path": "diffusers/scripts/convert_models_diffuser_to_diffusers.py",
"repo_id": "diffusers",
"token_count": 1700
} |
# Run this script to convert the Stable Cascade model weights to a diffusers pipeline.
import argparse
import json
import os
from contextlib import nullcontext
import torch
from safetensors.torch import load_file
from transformers import (
AutoTokenizer,
T5EncoderModel,
)
from diffusers import (
AutoencoderOobleck,
CosineDPMSolverMultistepScheduler,
StableAudioDiTModel,
StableAudioPipeline,
StableAudioProjectionModel,
)
from diffusers.models.modeling_utils import load_model_dict_into_meta
from diffusers.utils import is_accelerate_available
if is_accelerate_available():
from accelerate import init_empty_weights
def convert_stable_audio_state_dict_to_diffusers(state_dict, num_autoencoder_layers=5):
projection_model_state_dict = {
k.replace("conditioner.conditioners.", "").replace("embedder.embedding", "time_positional_embedding"): v
for (k, v) in state_dict.items()
if "conditioner.conditioners" in k
}
# NOTE: we assume here that there's no projection layer from the text encoder to the latent space, script should be adapted a bit if there is.
for key, value in list(projection_model_state_dict.items()):
new_key = key.replace("seconds_start", "start_number_conditioner").replace(
"seconds_total", "end_number_conditioner"
)
projection_model_state_dict[new_key] = projection_model_state_dict.pop(key)
model_state_dict = {k.replace("model.model.", ""): v for (k, v) in state_dict.items() if "model.model." in k}
for key, value in list(model_state_dict.items()):
# attention layers
new_key = (
key.replace("transformer.", "")
.replace("layers", "transformer_blocks")
.replace("self_attn", "attn1")
.replace("cross_attn", "attn2")
.replace("ff.ff", "ff.net")
)
new_key = (
new_key.replace("pre_norm", "norm1")
.replace("cross_attend_norm", "norm2")
.replace("ff_norm", "norm3")
.replace("to_out", "to_out.0")
)
new_key = new_key.replace("gamma", "weight").replace("beta", "bias") # replace layernorm
# other layers
new_key = (
new_key.replace("project", "proj")
.replace("to_timestep_embed", "timestep_proj")
.replace("timestep_features", "time_proj")
.replace("to_global_embed", "global_proj")
.replace("to_cond_embed", "cross_attention_proj")
)
# we're using diffusers implementation of time_proj (GaussianFourierProjection) which creates a 1D tensor
if new_key == "time_proj.weight":
model_state_dict[key] = model_state_dict[key].squeeze(1)
if "to_qkv" in new_key:
q, k, v = torch.chunk(model_state_dict.pop(key), 3, dim=0)
model_state_dict[new_key.replace("qkv", "q")] = q
model_state_dict[new_key.replace("qkv", "k")] = k
model_state_dict[new_key.replace("qkv", "v")] = v
elif "to_kv" in new_key:
k, v = torch.chunk(model_state_dict.pop(key), 2, dim=0)
model_state_dict[new_key.replace("kv", "k")] = k
model_state_dict[new_key.replace("kv", "v")] = v
else:
model_state_dict[new_key] = model_state_dict.pop(key)
autoencoder_state_dict = {
k.replace("pretransform.model.", "").replace("coder.layers.0", "coder.conv1"): v
for (k, v) in state_dict.items()
if "pretransform.model." in k
}
for key, _ in list(autoencoder_state_dict.items()):
new_key = key
if "coder.layers" in new_key:
# get idx of the layer
idx = int(new_key.split("coder.layers.")[1].split(".")[0])
new_key = new_key.replace(f"coder.layers.{idx}", f"coder.block.{idx-1}")
if "encoder" in new_key:
for i in range(3):
new_key = new_key.replace(f"block.{idx-1}.layers.{i}", f"block.{idx-1}.res_unit{i+1}")
new_key = new_key.replace(f"block.{idx-1}.layers.3", f"block.{idx-1}.snake1")
new_key = new_key.replace(f"block.{idx-1}.layers.4", f"block.{idx-1}.conv1")
else:
for i in range(2, 5):
new_key = new_key.replace(f"block.{idx-1}.layers.{i}", f"block.{idx-1}.res_unit{i-1}")
new_key = new_key.replace(f"block.{idx-1}.layers.0", f"block.{idx-1}.snake1")
new_key = new_key.replace(f"block.{idx-1}.layers.1", f"block.{idx-1}.conv_t1")
new_key = new_key.replace("layers.0.beta", "snake1.beta")
new_key = new_key.replace("layers.0.alpha", "snake1.alpha")
new_key = new_key.replace("layers.2.beta", "snake2.beta")
new_key = new_key.replace("layers.2.alpha", "snake2.alpha")
new_key = new_key.replace("layers.1.bias", "conv1.bias")
new_key = new_key.replace("layers.1.weight_", "conv1.weight_")
new_key = new_key.replace("layers.3.bias", "conv2.bias")
new_key = new_key.replace("layers.3.weight_", "conv2.weight_")
if idx == num_autoencoder_layers + 1:
new_key = new_key.replace(f"block.{idx-1}", "snake1")
elif idx == num_autoencoder_layers + 2:
new_key = new_key.replace(f"block.{idx-1}", "conv2")
else:
new_key = new_key
value = autoencoder_state_dict.pop(key)
if "snake" in new_key:
value = value.unsqueeze(0).unsqueeze(-1)
if new_key in autoencoder_state_dict:
raise ValueError(f"{new_key} already in state dict.")
autoencoder_state_dict[new_key] = value
return model_state_dict, projection_model_state_dict, autoencoder_state_dict
parser = argparse.ArgumentParser(description="Convert Stable Audio 1.0 model weights to a diffusers pipeline")
parser.add_argument("--model_folder_path", type=str, help="Location of Stable Audio weights and config")
parser.add_argument("--use_safetensors", action="store_true", help="Use SafeTensors for conversion")
parser.add_argument(
"--save_directory",
type=str,
default="./tmp/stable-audio-1.0",
help="Directory to save a pipeline to. Will be created if it doesn't exist.",
)
parser.add_argument(
"--repo_id",
type=str,
default="stable-audio-1.0",
help="Hub organization to save the pipelines to",
)
parser.add_argument("--push_to_hub", action="store_true", help="Push to hub")
parser.add_argument("--variant", type=str, help="Set to bf16 to save bfloat16 weights")
args = parser.parse_args()
checkpoint_path = (
os.path.join(args.model_folder_path, "model.safetensors")
if args.use_safetensors
else os.path.join(args.model_folder_path, "model.ckpt")
)
config_path = os.path.join(args.model_folder_path, "model_config.json")
device = "cpu"
if args.variant == "bf16":
dtype = torch.bfloat16
else:
dtype = torch.float32
with open(config_path) as f_in:
config_dict = json.load(f_in)
conditioning_dict = {
conditioning["id"]: conditioning["config"] for conditioning in config_dict["model"]["conditioning"]["configs"]
}
t5_model_config = conditioning_dict["prompt"]
# T5 Text encoder
text_encoder = T5EncoderModel.from_pretrained(t5_model_config["t5_model_name"])
tokenizer = AutoTokenizer.from_pretrained(
t5_model_config["t5_model_name"], truncation=True, model_max_length=t5_model_config["max_length"]
)
# scheduler
scheduler = CosineDPMSolverMultistepScheduler(
sigma_min=0.3,
sigma_max=500,
solver_order=2,
prediction_type="v_prediction",
sigma_data=1.0,
sigma_schedule="exponential",
)
ctx = init_empty_weights if is_accelerate_available() else nullcontext
if args.use_safetensors:
orig_state_dict = load_file(checkpoint_path, device=device)
else:
orig_state_dict = torch.load(checkpoint_path, map_location=device)
model_config = config_dict["model"]["diffusion"]["config"]
model_state_dict, projection_model_state_dict, autoencoder_state_dict = convert_stable_audio_state_dict_to_diffusers(
orig_state_dict
)
with ctx():
projection_model = StableAudioProjectionModel(
text_encoder_dim=text_encoder.config.d_model,
conditioning_dim=config_dict["model"]["conditioning"]["cond_dim"],
min_value=conditioning_dict["seconds_start"][
"min_val"
], # assume `seconds_start` and `seconds_total` have the same min / max values.
max_value=conditioning_dict["seconds_start"][
"max_val"
], # assume `seconds_start` and `seconds_total` have the same min / max values.
)
if is_accelerate_available():
load_model_dict_into_meta(projection_model, projection_model_state_dict)
else:
projection_model.load_state_dict(projection_model_state_dict)
attention_head_dim = model_config["embed_dim"] // model_config["num_heads"]
with ctx():
model = StableAudioDiTModel(
sample_size=int(config_dict["sample_size"])
/ int(config_dict["model"]["pretransform"]["config"]["downsampling_ratio"]),
in_channels=model_config["io_channels"],
num_layers=model_config["depth"],
attention_head_dim=attention_head_dim,
num_key_value_attention_heads=model_config["cond_token_dim"] // attention_head_dim,
num_attention_heads=model_config["num_heads"],
out_channels=model_config["io_channels"],
cross_attention_dim=model_config["cond_token_dim"],
time_proj_dim=256,
global_states_input_dim=model_config["global_cond_dim"],
cross_attention_input_dim=model_config["cond_token_dim"],
)
if is_accelerate_available():
load_model_dict_into_meta(model, model_state_dict)
else:
model.load_state_dict(model_state_dict)
autoencoder_config = config_dict["model"]["pretransform"]["config"]
with ctx():
autoencoder = AutoencoderOobleck(
encoder_hidden_size=autoencoder_config["encoder"]["config"]["channels"],
downsampling_ratios=autoencoder_config["encoder"]["config"]["strides"],
decoder_channels=autoencoder_config["decoder"]["config"]["channels"],
decoder_input_channels=autoencoder_config["decoder"]["config"]["latent_dim"],
audio_channels=autoencoder_config["io_channels"],
channel_multiples=autoencoder_config["encoder"]["config"]["c_mults"],
sampling_rate=config_dict["sample_rate"],
)
if is_accelerate_available():
load_model_dict_into_meta(autoencoder, autoencoder_state_dict)
else:
autoencoder.load_state_dict(autoencoder_state_dict)
# Prior pipeline
pipeline = StableAudioPipeline(
transformer=model,
tokenizer=tokenizer,
text_encoder=text_encoder,
scheduler=scheduler,
vae=autoencoder,
projection_model=projection_model,
)
pipeline.to(dtype).save_pretrained(
args.save_directory, repo_id=args.repo_id, push_to_hub=args.push_to_hub, variant=args.variant
)
| diffusers/scripts/convert_stable_audio.py/0 | {
"file_path": "diffusers/scripts/convert_stable_audio.py",
"repo_id": "diffusers",
"token_count": 4812
} |
"""
This script demonstrates how to extract a LoRA checkpoint from a fully finetuned model with the CogVideoX model.
To make it work for other models:
* Change the model class. Here we use `CogVideoXTransformer3DModel`. For Flux, it would be `FluxTransformer2DModel`,
for example. (TODO: more reason to add `AutoModel`).
* Spply path to the base checkpoint via `base_ckpt_path`.
* Supply path to the fully fine-tuned checkpoint via `--finetune_ckpt_path`.
* Change the `--rank` as needed.
Example usage:
```bash
python extract_lora_from_model.py \
--base_ckpt_path=THUDM/CogVideoX-5b \
--finetune_ckpt_path=finetrainers/cakeify-v0 \
--lora_out_path=cakeify_lora.safetensors
```
Script is adapted from
https://github.com/Stability-AI/stability-ComfyUI-nodes/blob/001154622564b17223ce0191803c5fff7b87146c/control_lora_create.py
"""
import argparse
import torch
from safetensors.torch import save_file
from tqdm.auto import tqdm
from diffusers import CogVideoXTransformer3DModel
RANK = 64
CLAMP_QUANTILE = 0.99
# Comes from
# https://github.com/Stability-AI/stability-ComfyUI-nodes/blob/001154622564b17223ce0191803c5fff7b87146c/control_lora_create.py#L9
def extract_lora(diff, rank):
# Important to use CUDA otherwise, very slow!
if torch.cuda.is_available():
diff = diff.to("cuda")
is_conv2d = len(diff.shape) == 4
kernel_size = None if not is_conv2d else diff.size()[2:4]
is_conv2d_3x3 = is_conv2d and kernel_size != (1, 1)
out_dim, in_dim = diff.size()[0:2]
rank = min(rank, in_dim, out_dim)
if is_conv2d:
if is_conv2d_3x3:
diff = diff.flatten(start_dim=1)
else:
diff = diff.squeeze()
U, S, Vh = torch.linalg.svd(diff.float())
U = U[:, :rank]
S = S[:rank]
U = U @ torch.diag(S)
Vh = Vh[:rank, :]
dist = torch.cat([U.flatten(), Vh.flatten()])
hi_val = torch.quantile(dist, CLAMP_QUANTILE)
low_val = -hi_val
U = U.clamp(low_val, hi_val)
Vh = Vh.clamp(low_val, hi_val)
if is_conv2d:
U = U.reshape(out_dim, rank, 1, 1)
Vh = Vh.reshape(rank, in_dim, kernel_size[0], kernel_size[1])
return (U.cpu(), Vh.cpu())
def parse_args():
parser = argparse.ArgumentParser()
parser.add_argument(
"--base_ckpt_path",
default=None,
type=str,
required=True,
help="Base checkpoint path from which the model was finetuned. Can be a model ID on the Hub.",
)
parser.add_argument(
"--base_subfolder",
default="transformer",
type=str,
help="subfolder to load the base checkpoint from if any.",
)
parser.add_argument(
"--finetune_ckpt_path",
default=None,
type=str,
required=True,
help="Fully fine-tuned checkpoint path. Can be a model ID on the Hub.",
)
parser.add_argument(
"--finetune_subfolder",
default=None,
type=str,
help="subfolder to load the fulle finetuned checkpoint from if any.",
)
parser.add_argument("--rank", default=64, type=int)
parser.add_argument("--lora_out_path", default=None, type=str, required=True)
args = parser.parse_args()
if not args.lora_out_path.endswith(".safetensors"):
raise ValueError("`lora_out_path` must end with `.safetensors`.")
return args
@torch.no_grad()
def main(args):
model_finetuned = CogVideoXTransformer3DModel.from_pretrained(
args.finetune_ckpt_path, subfolder=args.finetune_subfolder, torch_dtype=torch.bfloat16
)
state_dict_ft = model_finetuned.state_dict()
# Change the `subfolder` as needed.
base_model = CogVideoXTransformer3DModel.from_pretrained(
args.base_ckpt_path, subfolder=args.base_subfolder, torch_dtype=torch.bfloat16
)
state_dict = base_model.state_dict()
output_dict = {}
for k in tqdm(state_dict, desc="Extracting LoRA..."):
original_param = state_dict[k]
finetuned_param = state_dict_ft[k]
if len(original_param.shape) >= 2:
diff = finetuned_param.float() - original_param.float()
out = extract_lora(diff, RANK)
name = k
if name.endswith(".weight"):
name = name[: -len(".weight")]
down_key = "{}.lora_A.weight".format(name)
up_key = "{}.lora_B.weight".format(name)
output_dict[up_key] = out[0].contiguous().to(finetuned_param.dtype)
output_dict[down_key] = out[1].contiguous().to(finetuned_param.dtype)
prefix = "transformer" if "transformer" in base_model.__class__.__name__.lower() else "unet"
output_dict = {f"{prefix}.{k}": v for k, v in output_dict.items()}
save_file(output_dict, args.lora_out_path)
print(f"LoRA saved and it contains {len(output_dict)} keys.")
if __name__ == "__main__":
args = parse_args()
main(args)
| diffusers/scripts/extract_lora_from_model.py/0 | {
"file_path": "diffusers/scripts/extract_lora_from_model.py",
"repo_id": "diffusers",
"token_count": 2140
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import Dict
from ..models.attention_processor import SD3IPAdapterJointAttnProcessor2_0
from ..models.embeddings import IPAdapterTimeImageProjection
from ..models.modeling_utils import _LOW_CPU_MEM_USAGE_DEFAULT, load_model_dict_into_meta
class SD3Transformer2DLoadersMixin:
"""Load IP-Adapters and LoRA layers into a `[SD3Transformer2DModel]`."""
def _load_ip_adapter_weights(self, state_dict: Dict, low_cpu_mem_usage: bool = _LOW_CPU_MEM_USAGE_DEFAULT) -> None:
"""Sets IP-Adapter attention processors, image projection, and loads state_dict.
Args:
state_dict (`Dict`):
State dict with keys "ip_adapter", which contains parameters for attention processors, and
"image_proj", which contains parameters for image projection net.
low_cpu_mem_usage (`bool`, *optional*, defaults to `True` if torch version >= 1.9.0 else `False`):
Speed up model loading only loading the pretrained weights and not initializing the weights. This also
tries to not use more than 1x model size in CPU memory (including peak memory) while loading the model.
Only supported for PyTorch >= 1.9.0. If you are using an older version of PyTorch, setting this
argument to `True` will raise an error.
"""
# IP-Adapter cross attention parameters
hidden_size = self.config.attention_head_dim * self.config.num_attention_heads
ip_hidden_states_dim = self.config.attention_head_dim * self.config.num_attention_heads
timesteps_emb_dim = state_dict["ip_adapter"]["0.norm_ip.linear.weight"].shape[1]
# Dict where key is transformer layer index, value is attention processor's state dict
# ip_adapter state dict keys example: "0.norm_ip.linear.weight"
layer_state_dict = {idx: {} for idx in range(len(self.attn_processors))}
for key, weights in state_dict["ip_adapter"].items():
idx, name = key.split(".", maxsplit=1)
layer_state_dict[int(idx)][name] = weights
# Create IP-Adapter attention processor
attn_procs = {}
for idx, name in enumerate(self.attn_processors.keys()):
attn_procs[name] = SD3IPAdapterJointAttnProcessor2_0(
hidden_size=hidden_size,
ip_hidden_states_dim=ip_hidden_states_dim,
head_dim=self.config.attention_head_dim,
timesteps_emb_dim=timesteps_emb_dim,
).to(self.device, dtype=self.dtype)
if not low_cpu_mem_usage:
attn_procs[name].load_state_dict(layer_state_dict[idx], strict=True)
else:
load_model_dict_into_meta(
attn_procs[name], layer_state_dict[idx], device=self.device, dtype=self.dtype
)
self.set_attn_processor(attn_procs)
# Image projetion parameters
embed_dim = state_dict["image_proj"]["proj_in.weight"].shape[1]
output_dim = state_dict["image_proj"]["proj_out.weight"].shape[0]
hidden_dim = state_dict["image_proj"]["proj_in.weight"].shape[0]
heads = state_dict["image_proj"]["layers.0.attn.to_q.weight"].shape[0] // 64
num_queries = state_dict["image_proj"]["latents"].shape[1]
timestep_in_dim = state_dict["image_proj"]["time_embedding.linear_1.weight"].shape[1]
# Image projection
self.image_proj = IPAdapterTimeImageProjection(
embed_dim=embed_dim,
output_dim=output_dim,
hidden_dim=hidden_dim,
heads=heads,
num_queries=num_queries,
timestep_in_dim=timestep_in_dim,
).to(device=self.device, dtype=self.dtype)
if not low_cpu_mem_usage:
self.image_proj.load_state_dict(state_dict["image_proj"], strict=True)
else:
load_model_dict_into_meta(self.image_proj, state_dict["image_proj"], device=self.device, dtype=self.dtype)
| diffusers/src/diffusers/loaders/transformer_sd3.py/0 | {
"file_path": "diffusers/src/diffusers/loaders/transformer_sd3.py",
"repo_id": "diffusers",
"token_count": 1918
} |
# Copyright 2024 The CogVideoX team, Tsinghua University & ZhipuAI and The HuggingFace Team.
# All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import Dict, Optional, Tuple, Union
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from ...configuration_utils import ConfigMixin, register_to_config
from ...loaders.single_file_model import FromOriginalModelMixin
from ...utils import logging
from ...utils.accelerate_utils import apply_forward_hook
from ..activations import get_activation
from ..downsampling import CogVideoXDownsample3D
from ..modeling_outputs import AutoencoderKLOutput
from ..modeling_utils import ModelMixin
from ..upsampling import CogVideoXUpsample3D
from .vae import DecoderOutput, DiagonalGaussianDistribution
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
class CogVideoXSafeConv3d(nn.Conv3d):
r"""
A 3D convolution layer that splits the input tensor into smaller parts to avoid OOM in CogVideoX Model.
"""
def forward(self, input: torch.Tensor) -> torch.Tensor:
memory_count = (
(input.shape[0] * input.shape[1] * input.shape[2] * input.shape[3] * input.shape[4]) * 2 / 1024**3
)
# Set to 2GB, suitable for CuDNN
if memory_count > 2:
kernel_size = self.kernel_size[0]
part_num = int(memory_count / 2) + 1
input_chunks = torch.chunk(input, part_num, dim=2)
if kernel_size > 1:
input_chunks = [input_chunks[0]] + [
torch.cat((input_chunks[i - 1][:, :, -kernel_size + 1 :], input_chunks[i]), dim=2)
for i in range(1, len(input_chunks))
]
output_chunks = []
for input_chunk in input_chunks:
output_chunks.append(super().forward(input_chunk))
output = torch.cat(output_chunks, dim=2)
return output
else:
return super().forward(input)
class CogVideoXCausalConv3d(nn.Module):
r"""A 3D causal convolution layer that pads the input tensor to ensure causality in CogVideoX Model.
Args:
in_channels (`int`): Number of channels in the input tensor.
out_channels (`int`): Number of output channels produced by the convolution.
kernel_size (`int` or `Tuple[int, int, int]`): Kernel size of the convolutional kernel.
stride (`int`, defaults to `1`): Stride of the convolution.
dilation (`int`, defaults to `1`): Dilation rate of the convolution.
pad_mode (`str`, defaults to `"constant"`): Padding mode.
"""
def __init__(
self,
in_channels: int,
out_channels: int,
kernel_size: Union[int, Tuple[int, int, int]],
stride: int = 1,
dilation: int = 1,
pad_mode: str = "constant",
):
super().__init__()
if isinstance(kernel_size, int):
kernel_size = (kernel_size,) * 3
time_kernel_size, height_kernel_size, width_kernel_size = kernel_size
# TODO(aryan): configure calculation based on stride and dilation in the future.
# Since CogVideoX does not use it, it is currently tailored to "just work" with Mochi
time_pad = time_kernel_size - 1
height_pad = (height_kernel_size - 1) // 2
width_pad = (width_kernel_size - 1) // 2
self.pad_mode = pad_mode
self.height_pad = height_pad
self.width_pad = width_pad
self.time_pad = time_pad
self.time_causal_padding = (width_pad, width_pad, height_pad, height_pad, time_pad, 0)
self.temporal_dim = 2
self.time_kernel_size = time_kernel_size
stride = stride if isinstance(stride, tuple) else (stride, 1, 1)
dilation = (dilation, 1, 1)
self.conv = CogVideoXSafeConv3d(
in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
dilation=dilation,
)
def fake_context_parallel_forward(
self, inputs: torch.Tensor, conv_cache: Optional[torch.Tensor] = None
) -> torch.Tensor:
if self.pad_mode == "replicate":
inputs = F.pad(inputs, self.time_causal_padding, mode="replicate")
else:
kernel_size = self.time_kernel_size
if kernel_size > 1:
cached_inputs = [conv_cache] if conv_cache is not None else [inputs[:, :, :1]] * (kernel_size - 1)
inputs = torch.cat(cached_inputs + [inputs], dim=2)
return inputs
def forward(self, inputs: torch.Tensor, conv_cache: Optional[torch.Tensor] = None) -> torch.Tensor:
inputs = self.fake_context_parallel_forward(inputs, conv_cache)
if self.pad_mode == "replicate":
conv_cache = None
else:
padding_2d = (self.width_pad, self.width_pad, self.height_pad, self.height_pad)
conv_cache = inputs[:, :, -self.time_kernel_size + 1 :].clone()
inputs = F.pad(inputs, padding_2d, mode="constant", value=0)
output = self.conv(inputs)
return output, conv_cache
class CogVideoXSpatialNorm3D(nn.Module):
r"""
Spatially conditioned normalization as defined in https://arxiv.org/abs/2209.09002. This implementation is specific
to 3D-video like data.
CogVideoXSafeConv3d is used instead of nn.Conv3d to avoid OOM in CogVideoX Model.
Args:
f_channels (`int`):
The number of channels for input to group normalization layer, and output of the spatial norm layer.
zq_channels (`int`):
The number of channels for the quantized vector as described in the paper.
groups (`int`):
Number of groups to separate the channels into for group normalization.
"""
def __init__(
self,
f_channels: int,
zq_channels: int,
groups: int = 32,
):
super().__init__()
self.norm_layer = nn.GroupNorm(num_channels=f_channels, num_groups=groups, eps=1e-6, affine=True)
self.conv_y = CogVideoXCausalConv3d(zq_channels, f_channels, kernel_size=1, stride=1)
self.conv_b = CogVideoXCausalConv3d(zq_channels, f_channels, kernel_size=1, stride=1)
def forward(
self, f: torch.Tensor, zq: torch.Tensor, conv_cache: Optional[Dict[str, torch.Tensor]] = None
) -> torch.Tensor:
new_conv_cache = {}
conv_cache = conv_cache or {}
if f.shape[2] > 1 and f.shape[2] % 2 == 1:
f_first, f_rest = f[:, :, :1], f[:, :, 1:]
f_first_size, f_rest_size = f_first.shape[-3:], f_rest.shape[-3:]
z_first, z_rest = zq[:, :, :1], zq[:, :, 1:]
z_first = F.interpolate(z_first, size=f_first_size)
z_rest = F.interpolate(z_rest, size=f_rest_size)
zq = torch.cat([z_first, z_rest], dim=2)
else:
zq = F.interpolate(zq, size=f.shape[-3:])
conv_y, new_conv_cache["conv_y"] = self.conv_y(zq, conv_cache=conv_cache.get("conv_y"))
conv_b, new_conv_cache["conv_b"] = self.conv_b(zq, conv_cache=conv_cache.get("conv_b"))
norm_f = self.norm_layer(f)
new_f = norm_f * conv_y + conv_b
return new_f, new_conv_cache
class CogVideoXResnetBlock3D(nn.Module):
r"""
A 3D ResNet block used in the CogVideoX model.
Args:
in_channels (`int`):
Number of input channels.
out_channels (`int`, *optional*):
Number of output channels. If None, defaults to `in_channels`.
dropout (`float`, defaults to `0.0`):
Dropout rate.
temb_channels (`int`, defaults to `512`):
Number of time embedding channels.
groups (`int`, defaults to `32`):
Number of groups to separate the channels into for group normalization.
eps (`float`, defaults to `1e-6`):
Epsilon value for normalization layers.
non_linearity (`str`, defaults to `"swish"`):
Activation function to use.
conv_shortcut (bool, defaults to `False`):
Whether or not to use a convolution shortcut.
spatial_norm_dim (`int`, *optional*):
The dimension to use for spatial norm if it is to be used instead of group norm.
pad_mode (str, defaults to `"first"`):
Padding mode.
"""
def __init__(
self,
in_channels: int,
out_channels: Optional[int] = None,
dropout: float = 0.0,
temb_channels: int = 512,
groups: int = 32,
eps: float = 1e-6,
non_linearity: str = "swish",
conv_shortcut: bool = False,
spatial_norm_dim: Optional[int] = None,
pad_mode: str = "first",
):
super().__init__()
out_channels = out_channels or in_channels
self.in_channels = in_channels
self.out_channels = out_channels
self.nonlinearity = get_activation(non_linearity)
self.use_conv_shortcut = conv_shortcut
self.spatial_norm_dim = spatial_norm_dim
if spatial_norm_dim is None:
self.norm1 = nn.GroupNorm(num_channels=in_channels, num_groups=groups, eps=eps)
self.norm2 = nn.GroupNorm(num_channels=out_channels, num_groups=groups, eps=eps)
else:
self.norm1 = CogVideoXSpatialNorm3D(
f_channels=in_channels,
zq_channels=spatial_norm_dim,
groups=groups,
)
self.norm2 = CogVideoXSpatialNorm3D(
f_channels=out_channels,
zq_channels=spatial_norm_dim,
groups=groups,
)
self.conv1 = CogVideoXCausalConv3d(
in_channels=in_channels, out_channels=out_channels, kernel_size=3, pad_mode=pad_mode
)
if temb_channels > 0:
self.temb_proj = nn.Linear(in_features=temb_channels, out_features=out_channels)
self.dropout = nn.Dropout(dropout)
self.conv2 = CogVideoXCausalConv3d(
in_channels=out_channels, out_channels=out_channels, kernel_size=3, pad_mode=pad_mode
)
if self.in_channels != self.out_channels:
if self.use_conv_shortcut:
self.conv_shortcut = CogVideoXCausalConv3d(
in_channels=in_channels, out_channels=out_channels, kernel_size=3, pad_mode=pad_mode
)
else:
self.conv_shortcut = CogVideoXSafeConv3d(
in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=1, padding=0
)
def forward(
self,
inputs: torch.Tensor,
temb: Optional[torch.Tensor] = None,
zq: Optional[torch.Tensor] = None,
conv_cache: Optional[Dict[str, torch.Tensor]] = None,
) -> torch.Tensor:
new_conv_cache = {}
conv_cache = conv_cache or {}
hidden_states = inputs
if zq is not None:
hidden_states, new_conv_cache["norm1"] = self.norm1(hidden_states, zq, conv_cache=conv_cache.get("norm1"))
else:
hidden_states = self.norm1(hidden_states)
hidden_states = self.nonlinearity(hidden_states)
hidden_states, new_conv_cache["conv1"] = self.conv1(hidden_states, conv_cache=conv_cache.get("conv1"))
if temb is not None:
hidden_states = hidden_states + self.temb_proj(self.nonlinearity(temb))[:, :, None, None, None]
if zq is not None:
hidden_states, new_conv_cache["norm2"] = self.norm2(hidden_states, zq, conv_cache=conv_cache.get("norm2"))
else:
hidden_states = self.norm2(hidden_states)
hidden_states = self.nonlinearity(hidden_states)
hidden_states = self.dropout(hidden_states)
hidden_states, new_conv_cache["conv2"] = self.conv2(hidden_states, conv_cache=conv_cache.get("conv2"))
if self.in_channels != self.out_channels:
if self.use_conv_shortcut:
inputs, new_conv_cache["conv_shortcut"] = self.conv_shortcut(
inputs, conv_cache=conv_cache.get("conv_shortcut")
)
else:
inputs = self.conv_shortcut(inputs)
hidden_states = hidden_states + inputs
return hidden_states, new_conv_cache
class CogVideoXDownBlock3D(nn.Module):
r"""
A downsampling block used in the CogVideoX model.
Args:
in_channels (`int`):
Number of input channels.
out_channels (`int`, *optional*):
Number of output channels. If None, defaults to `in_channels`.
temb_channels (`int`, defaults to `512`):
Number of time embedding channels.
num_layers (`int`, defaults to `1`):
Number of resnet layers.
dropout (`float`, defaults to `0.0`):
Dropout rate.
resnet_eps (`float`, defaults to `1e-6`):
Epsilon value for normalization layers.
resnet_act_fn (`str`, defaults to `"swish"`):
Activation function to use.
resnet_groups (`int`, defaults to `32`):
Number of groups to separate the channels into for group normalization.
add_downsample (`bool`, defaults to `True`):
Whether or not to use a downsampling layer. If not used, output dimension would be same as input dimension.
compress_time (`bool`, defaults to `False`):
Whether or not to downsample across temporal dimension.
pad_mode (str, defaults to `"first"`):
Padding mode.
"""
_supports_gradient_checkpointing = True
def __init__(
self,
in_channels: int,
out_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
resnet_eps: float = 1e-6,
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
add_downsample: bool = True,
downsample_padding: int = 0,
compress_time: bool = False,
pad_mode: str = "first",
):
super().__init__()
resnets = []
for i in range(num_layers):
in_channel = in_channels if i == 0 else out_channels
resnets.append(
CogVideoXResnetBlock3D(
in_channels=in_channel,
out_channels=out_channels,
dropout=dropout,
temb_channels=temb_channels,
groups=resnet_groups,
eps=resnet_eps,
non_linearity=resnet_act_fn,
pad_mode=pad_mode,
)
)
self.resnets = nn.ModuleList(resnets)
self.downsamplers = None
if add_downsample:
self.downsamplers = nn.ModuleList(
[
CogVideoXDownsample3D(
out_channels, out_channels, padding=downsample_padding, compress_time=compress_time
)
]
)
self.gradient_checkpointing = False
def forward(
self,
hidden_states: torch.Tensor,
temb: Optional[torch.Tensor] = None,
zq: Optional[torch.Tensor] = None,
conv_cache: Optional[Dict[str, torch.Tensor]] = None,
) -> torch.Tensor:
r"""Forward method of the `CogVideoXDownBlock3D` class."""
new_conv_cache = {}
conv_cache = conv_cache or {}
for i, resnet in enumerate(self.resnets):
conv_cache_key = f"resnet_{i}"
if torch.is_grad_enabled() and self.gradient_checkpointing:
hidden_states, new_conv_cache[conv_cache_key] = self._gradient_checkpointing_func(
resnet,
hidden_states,
temb,
zq,
conv_cache.get(conv_cache_key),
)
else:
hidden_states, new_conv_cache[conv_cache_key] = resnet(
hidden_states, temb, zq, conv_cache=conv_cache.get(conv_cache_key)
)
if self.downsamplers is not None:
for downsampler in self.downsamplers:
hidden_states = downsampler(hidden_states)
return hidden_states, new_conv_cache
class CogVideoXMidBlock3D(nn.Module):
r"""
A middle block used in the CogVideoX model.
Args:
in_channels (`int`):
Number of input channels.
temb_channels (`int`, defaults to `512`):
Number of time embedding channels.
dropout (`float`, defaults to `0.0`):
Dropout rate.
num_layers (`int`, defaults to `1`):
Number of resnet layers.
resnet_eps (`float`, defaults to `1e-6`):
Epsilon value for normalization layers.
resnet_act_fn (`str`, defaults to `"swish"`):
Activation function to use.
resnet_groups (`int`, defaults to `32`):
Number of groups to separate the channels into for group normalization.
spatial_norm_dim (`int`, *optional*):
The dimension to use for spatial norm if it is to be used instead of group norm.
pad_mode (str, defaults to `"first"`):
Padding mode.
"""
_supports_gradient_checkpointing = True
def __init__(
self,
in_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
resnet_eps: float = 1e-6,
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
spatial_norm_dim: Optional[int] = None,
pad_mode: str = "first",
):
super().__init__()
resnets = []
for _ in range(num_layers):
resnets.append(
CogVideoXResnetBlock3D(
in_channels=in_channels,
out_channels=in_channels,
dropout=dropout,
temb_channels=temb_channels,
groups=resnet_groups,
eps=resnet_eps,
spatial_norm_dim=spatial_norm_dim,
non_linearity=resnet_act_fn,
pad_mode=pad_mode,
)
)
self.resnets = nn.ModuleList(resnets)
self.gradient_checkpointing = False
def forward(
self,
hidden_states: torch.Tensor,
temb: Optional[torch.Tensor] = None,
zq: Optional[torch.Tensor] = None,
conv_cache: Optional[Dict[str, torch.Tensor]] = None,
) -> torch.Tensor:
r"""Forward method of the `CogVideoXMidBlock3D` class."""
new_conv_cache = {}
conv_cache = conv_cache or {}
for i, resnet in enumerate(self.resnets):
conv_cache_key = f"resnet_{i}"
if torch.is_grad_enabled() and self.gradient_checkpointing:
hidden_states, new_conv_cache[conv_cache_key] = self._gradient_checkpointing_func(
resnet, hidden_states, temb, zq, conv_cache.get(conv_cache_key)
)
else:
hidden_states, new_conv_cache[conv_cache_key] = resnet(
hidden_states, temb, zq, conv_cache=conv_cache.get(conv_cache_key)
)
return hidden_states, new_conv_cache
class CogVideoXUpBlock3D(nn.Module):
r"""
An upsampling block used in the CogVideoX model.
Args:
in_channels (`int`):
Number of input channels.
out_channels (`int`, *optional*):
Number of output channels. If None, defaults to `in_channels`.
temb_channels (`int`, defaults to `512`):
Number of time embedding channels.
dropout (`float`, defaults to `0.0`):
Dropout rate.
num_layers (`int`, defaults to `1`):
Number of resnet layers.
resnet_eps (`float`, defaults to `1e-6`):
Epsilon value for normalization layers.
resnet_act_fn (`str`, defaults to `"swish"`):
Activation function to use.
resnet_groups (`int`, defaults to `32`):
Number of groups to separate the channels into for group normalization.
spatial_norm_dim (`int`, defaults to `16`):
The dimension to use for spatial norm if it is to be used instead of group norm.
add_upsample (`bool`, defaults to `True`):
Whether or not to use a upsampling layer. If not used, output dimension would be same as input dimension.
compress_time (`bool`, defaults to `False`):
Whether or not to downsample across temporal dimension.
pad_mode (str, defaults to `"first"`):
Padding mode.
"""
def __init__(
self,
in_channels: int,
out_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
resnet_eps: float = 1e-6,
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
spatial_norm_dim: int = 16,
add_upsample: bool = True,
upsample_padding: int = 1,
compress_time: bool = False,
pad_mode: str = "first",
):
super().__init__()
resnets = []
for i in range(num_layers):
in_channel = in_channels if i == 0 else out_channels
resnets.append(
CogVideoXResnetBlock3D(
in_channels=in_channel,
out_channels=out_channels,
dropout=dropout,
temb_channels=temb_channels,
groups=resnet_groups,
eps=resnet_eps,
non_linearity=resnet_act_fn,
spatial_norm_dim=spatial_norm_dim,
pad_mode=pad_mode,
)
)
self.resnets = nn.ModuleList(resnets)
self.upsamplers = None
if add_upsample:
self.upsamplers = nn.ModuleList(
[
CogVideoXUpsample3D(
out_channels, out_channels, padding=upsample_padding, compress_time=compress_time
)
]
)
self.gradient_checkpointing = False
def forward(
self,
hidden_states: torch.Tensor,
temb: Optional[torch.Tensor] = None,
zq: Optional[torch.Tensor] = None,
conv_cache: Optional[Dict[str, torch.Tensor]] = None,
) -> torch.Tensor:
r"""Forward method of the `CogVideoXUpBlock3D` class."""
new_conv_cache = {}
conv_cache = conv_cache or {}
for i, resnet in enumerate(self.resnets):
conv_cache_key = f"resnet_{i}"
if torch.is_grad_enabled() and self.gradient_checkpointing:
hidden_states, new_conv_cache[conv_cache_key] = self._gradient_checkpointing_func(
resnet,
hidden_states,
temb,
zq,
conv_cache.get(conv_cache_key),
)
else:
hidden_states, new_conv_cache[conv_cache_key] = resnet(
hidden_states, temb, zq, conv_cache=conv_cache.get(conv_cache_key)
)
if self.upsamplers is not None:
for upsampler in self.upsamplers:
hidden_states = upsampler(hidden_states)
return hidden_states, new_conv_cache
class CogVideoXEncoder3D(nn.Module):
r"""
The `CogVideoXEncoder3D` layer of a variational autoencoder that encodes its input into a latent representation.
Args:
in_channels (`int`, *optional*, defaults to 3):
The number of input channels.
out_channels (`int`, *optional*, defaults to 3):
The number of output channels.
down_block_types (`Tuple[str, ...]`, *optional*, defaults to `("DownEncoderBlock2D",)`):
The types of down blocks to use. See `~diffusers.models.unet_2d_blocks.get_down_block` for available
options.
block_out_channels (`Tuple[int, ...]`, *optional*, defaults to `(64,)`):
The number of output channels for each block.
act_fn (`str`, *optional*, defaults to `"silu"`):
The activation function to use. See `~diffusers.models.activations.get_activation` for available options.
layers_per_block (`int`, *optional*, defaults to 2):
The number of layers per block.
norm_num_groups (`int`, *optional*, defaults to 32):
The number of groups for normalization.
"""
_supports_gradient_checkpointing = True
def __init__(
self,
in_channels: int = 3,
out_channels: int = 16,
down_block_types: Tuple[str, ...] = (
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
),
block_out_channels: Tuple[int, ...] = (128, 256, 256, 512),
layers_per_block: int = 3,
act_fn: str = "silu",
norm_eps: float = 1e-6,
norm_num_groups: int = 32,
dropout: float = 0.0,
pad_mode: str = "first",
temporal_compression_ratio: float = 4,
):
super().__init__()
# log2 of temporal_compress_times
temporal_compress_level = int(np.log2(temporal_compression_ratio))
self.conv_in = CogVideoXCausalConv3d(in_channels, block_out_channels[0], kernel_size=3, pad_mode=pad_mode)
self.down_blocks = nn.ModuleList([])
# down blocks
output_channel = block_out_channels[0]
for i, down_block_type in enumerate(down_block_types):
input_channel = output_channel
output_channel = block_out_channels[i]
is_final_block = i == len(block_out_channels) - 1
compress_time = i < temporal_compress_level
if down_block_type == "CogVideoXDownBlock3D":
down_block = CogVideoXDownBlock3D(
in_channels=input_channel,
out_channels=output_channel,
temb_channels=0,
dropout=dropout,
num_layers=layers_per_block,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
add_downsample=not is_final_block,
compress_time=compress_time,
)
else:
raise ValueError("Invalid `down_block_type` encountered. Must be `CogVideoXDownBlock3D`")
self.down_blocks.append(down_block)
# mid block
self.mid_block = CogVideoXMidBlock3D(
in_channels=block_out_channels[-1],
temb_channels=0,
dropout=dropout,
num_layers=2,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
pad_mode=pad_mode,
)
self.norm_out = nn.GroupNorm(norm_num_groups, block_out_channels[-1], eps=1e-6)
self.conv_act = nn.SiLU()
self.conv_out = CogVideoXCausalConv3d(
block_out_channels[-1], 2 * out_channels, kernel_size=3, pad_mode=pad_mode
)
self.gradient_checkpointing = False
def forward(
self,
sample: torch.Tensor,
temb: Optional[torch.Tensor] = None,
conv_cache: Optional[Dict[str, torch.Tensor]] = None,
) -> torch.Tensor:
r"""The forward method of the `CogVideoXEncoder3D` class."""
new_conv_cache = {}
conv_cache = conv_cache or {}
hidden_states, new_conv_cache["conv_in"] = self.conv_in(sample, conv_cache=conv_cache.get("conv_in"))
if torch.is_grad_enabled() and self.gradient_checkpointing:
# 1. Down
for i, down_block in enumerate(self.down_blocks):
conv_cache_key = f"down_block_{i}"
hidden_states, new_conv_cache[conv_cache_key] = self._gradient_checkpointing_func(
down_block,
hidden_states,
temb,
None,
conv_cache.get(conv_cache_key),
)
# 2. Mid
hidden_states, new_conv_cache["mid_block"] = self._gradient_checkpointing_func(
self.mid_block,
hidden_states,
temb,
None,
conv_cache.get("mid_block"),
)
else:
# 1. Down
for i, down_block in enumerate(self.down_blocks):
conv_cache_key = f"down_block_{i}"
hidden_states, new_conv_cache[conv_cache_key] = down_block(
hidden_states, temb, None, conv_cache.get(conv_cache_key)
)
# 2. Mid
hidden_states, new_conv_cache["mid_block"] = self.mid_block(
hidden_states, temb, None, conv_cache=conv_cache.get("mid_block")
)
# 3. Post-process
hidden_states = self.norm_out(hidden_states)
hidden_states = self.conv_act(hidden_states)
hidden_states, new_conv_cache["conv_out"] = self.conv_out(hidden_states, conv_cache=conv_cache.get("conv_out"))
return hidden_states, new_conv_cache
class CogVideoXDecoder3D(nn.Module):
r"""
The `CogVideoXDecoder3D` layer of a variational autoencoder that decodes its latent representation into an output
sample.
Args:
in_channels (`int`, *optional*, defaults to 3):
The number of input channels.
out_channels (`int`, *optional*, defaults to 3):
The number of output channels.
up_block_types (`Tuple[str, ...]`, *optional*, defaults to `("UpDecoderBlock2D",)`):
The types of up blocks to use. See `~diffusers.models.unet_2d_blocks.get_up_block` for available options.
block_out_channels (`Tuple[int, ...]`, *optional*, defaults to `(64,)`):
The number of output channels for each block.
act_fn (`str`, *optional*, defaults to `"silu"`):
The activation function to use. See `~diffusers.models.activations.get_activation` for available options.
layers_per_block (`int`, *optional*, defaults to 2):
The number of layers per block.
norm_num_groups (`int`, *optional*, defaults to 32):
The number of groups for normalization.
"""
_supports_gradient_checkpointing = True
def __init__(
self,
in_channels: int = 16,
out_channels: int = 3,
up_block_types: Tuple[str, ...] = (
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
),
block_out_channels: Tuple[int, ...] = (128, 256, 256, 512),
layers_per_block: int = 3,
act_fn: str = "silu",
norm_eps: float = 1e-6,
norm_num_groups: int = 32,
dropout: float = 0.0,
pad_mode: str = "first",
temporal_compression_ratio: float = 4,
):
super().__init__()
reversed_block_out_channels = list(reversed(block_out_channels))
self.conv_in = CogVideoXCausalConv3d(
in_channels, reversed_block_out_channels[0], kernel_size=3, pad_mode=pad_mode
)
# mid block
self.mid_block = CogVideoXMidBlock3D(
in_channels=reversed_block_out_channels[0],
temb_channels=0,
num_layers=2,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
spatial_norm_dim=in_channels,
pad_mode=pad_mode,
)
# up blocks
self.up_blocks = nn.ModuleList([])
output_channel = reversed_block_out_channels[0]
temporal_compress_level = int(np.log2(temporal_compression_ratio))
for i, up_block_type in enumerate(up_block_types):
prev_output_channel = output_channel
output_channel = reversed_block_out_channels[i]
is_final_block = i == len(block_out_channels) - 1
compress_time = i < temporal_compress_level
if up_block_type == "CogVideoXUpBlock3D":
up_block = CogVideoXUpBlock3D(
in_channels=prev_output_channel,
out_channels=output_channel,
temb_channels=0,
dropout=dropout,
num_layers=layers_per_block + 1,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
spatial_norm_dim=in_channels,
add_upsample=not is_final_block,
compress_time=compress_time,
pad_mode=pad_mode,
)
prev_output_channel = output_channel
else:
raise ValueError("Invalid `up_block_type` encountered. Must be `CogVideoXUpBlock3D`")
self.up_blocks.append(up_block)
self.norm_out = CogVideoXSpatialNorm3D(reversed_block_out_channels[-1], in_channels, groups=norm_num_groups)
self.conv_act = nn.SiLU()
self.conv_out = CogVideoXCausalConv3d(
reversed_block_out_channels[-1], out_channels, kernel_size=3, pad_mode=pad_mode
)
self.gradient_checkpointing = False
def forward(
self,
sample: torch.Tensor,
temb: Optional[torch.Tensor] = None,
conv_cache: Optional[Dict[str, torch.Tensor]] = None,
) -> torch.Tensor:
r"""The forward method of the `CogVideoXDecoder3D` class."""
new_conv_cache = {}
conv_cache = conv_cache or {}
hidden_states, new_conv_cache["conv_in"] = self.conv_in(sample, conv_cache=conv_cache.get("conv_in"))
if torch.is_grad_enabled() and self.gradient_checkpointing:
# 1. Mid
hidden_states, new_conv_cache["mid_block"] = self._gradient_checkpointing_func(
self.mid_block,
hidden_states,
temb,
sample,
conv_cache.get("mid_block"),
)
# 2. Up
for i, up_block in enumerate(self.up_blocks):
conv_cache_key = f"up_block_{i}"
hidden_states, new_conv_cache[conv_cache_key] = self._gradient_checkpointing_func(
up_block,
hidden_states,
temb,
sample,
conv_cache.get(conv_cache_key),
)
else:
# 1. Mid
hidden_states, new_conv_cache["mid_block"] = self.mid_block(
hidden_states, temb, sample, conv_cache=conv_cache.get("mid_block")
)
# 2. Up
for i, up_block in enumerate(self.up_blocks):
conv_cache_key = f"up_block_{i}"
hidden_states, new_conv_cache[conv_cache_key] = up_block(
hidden_states, temb, sample, conv_cache=conv_cache.get(conv_cache_key)
)
# 3. Post-process
hidden_states, new_conv_cache["norm_out"] = self.norm_out(
hidden_states, sample, conv_cache=conv_cache.get("norm_out")
)
hidden_states = self.conv_act(hidden_states)
hidden_states, new_conv_cache["conv_out"] = self.conv_out(hidden_states, conv_cache=conv_cache.get("conv_out"))
return hidden_states, new_conv_cache
class AutoencoderKLCogVideoX(ModelMixin, ConfigMixin, FromOriginalModelMixin):
r"""
A VAE model with KL loss for encoding images into latents and decoding latent representations into images. Used in
[CogVideoX](https://github.com/THUDM/CogVideo).
This model inherits from [`ModelMixin`]. Check the superclass documentation for it's generic methods implemented
for all models (such as downloading or saving).
Parameters:
in_channels (int, *optional*, defaults to 3): Number of channels in the input image.
out_channels (int, *optional*, defaults to 3): Number of channels in the output.
down_block_types (`Tuple[str]`, *optional*, defaults to `("DownEncoderBlock2D",)`):
Tuple of downsample block types.
up_block_types (`Tuple[str]`, *optional*, defaults to `("UpDecoderBlock2D",)`):
Tuple of upsample block types.
block_out_channels (`Tuple[int]`, *optional*, defaults to `(64,)`):
Tuple of block output channels.
act_fn (`str`, *optional*, defaults to `"silu"`): The activation function to use.
sample_size (`int`, *optional*, defaults to `32`): Sample input size.
scaling_factor (`float`, *optional*, defaults to `1.15258426`):
The component-wise standard deviation of the trained latent space computed using the first batch of the
training set. This is used to scale the latent space to have unit variance when training the diffusion
model. The latents are scaled with the formula `z = z * scaling_factor` before being passed to the
diffusion model. When decoding, the latents are scaled back to the original scale with the formula: `z = 1
/ scaling_factor * z`. For more details, refer to sections 4.3.2 and D.1 of the [High-Resolution Image
Synthesis with Latent Diffusion Models](https://arxiv.org/abs/2112.10752) paper.
force_upcast (`bool`, *optional*, default to `True`):
If enabled it will force the VAE to run in float32 for high image resolution pipelines, such as SD-XL. VAE
can be fine-tuned / trained to a lower range without loosing too much precision in which case
`force_upcast` can be set to `False` - see: https://huggingface.co/madebyollin/sdxl-vae-fp16-fix
"""
_supports_gradient_checkpointing = True
_no_split_modules = ["CogVideoXResnetBlock3D"]
@register_to_config
def __init__(
self,
in_channels: int = 3,
out_channels: int = 3,
down_block_types: Tuple[str] = (
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
),
up_block_types: Tuple[str] = (
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
),
block_out_channels: Tuple[int] = (128, 256, 256, 512),
latent_channels: int = 16,
layers_per_block: int = 3,
act_fn: str = "silu",
norm_eps: float = 1e-6,
norm_num_groups: int = 32,
temporal_compression_ratio: float = 4,
sample_height: int = 480,
sample_width: int = 720,
scaling_factor: float = 1.15258426,
shift_factor: Optional[float] = None,
latents_mean: Optional[Tuple[float]] = None,
latents_std: Optional[Tuple[float]] = None,
force_upcast: float = True,
use_quant_conv: bool = False,
use_post_quant_conv: bool = False,
invert_scale_latents: bool = False,
):
super().__init__()
self.encoder = CogVideoXEncoder3D(
in_channels=in_channels,
out_channels=latent_channels,
down_block_types=down_block_types,
block_out_channels=block_out_channels,
layers_per_block=layers_per_block,
act_fn=act_fn,
norm_eps=norm_eps,
norm_num_groups=norm_num_groups,
temporal_compression_ratio=temporal_compression_ratio,
)
self.decoder = CogVideoXDecoder3D(
in_channels=latent_channels,
out_channels=out_channels,
up_block_types=up_block_types,
block_out_channels=block_out_channels,
layers_per_block=layers_per_block,
act_fn=act_fn,
norm_eps=norm_eps,
norm_num_groups=norm_num_groups,
temporal_compression_ratio=temporal_compression_ratio,
)
self.quant_conv = CogVideoXSafeConv3d(2 * out_channels, 2 * out_channels, 1) if use_quant_conv else None
self.post_quant_conv = CogVideoXSafeConv3d(out_channels, out_channels, 1) if use_post_quant_conv else None
self.use_slicing = False
self.use_tiling = False
# Can be increased to decode more latent frames at once, but comes at a reasonable memory cost and it is not
# recommended because the temporal parts of the VAE, here, are tricky to understand.
# If you decode X latent frames together, the number of output frames is:
# (X + (2 conv cache) + (2 time upscale_1) + (4 time upscale_2) - (2 causal conv downscale)) => X + 6 frames
#
# Example with num_latent_frames_batch_size = 2:
# - 12 latent frames: (0, 1), (2, 3), (4, 5), (6, 7), (8, 9), (10, 11) are processed together
# => (12 // 2 frame slices) * ((2 num_latent_frames_batch_size) + (2 conv cache) + (2 time upscale_1) + (4 time upscale_2) - (2 causal conv downscale))
# => 6 * 8 = 48 frames
# - 13 latent frames: (0, 1, 2) (special case), (3, 4), (5, 6), (7, 8), (9, 10), (11, 12) are processed together
# => (1 frame slice) * ((3 num_latent_frames_batch_size) + (2 conv cache) + (2 time upscale_1) + (4 time upscale_2) - (2 causal conv downscale)) +
# ((13 - 3) // 2) * ((2 num_latent_frames_batch_size) + (2 conv cache) + (2 time upscale_1) + (4 time upscale_2) - (2 causal conv downscale))
# => 1 * 9 + 5 * 8 = 49 frames
# It has been implemented this way so as to not have "magic values" in the code base that would be hard to explain. Note that
# setting it to anything other than 2 would give poor results because the VAE hasn't been trained to be adaptive with different
# number of temporal frames.
self.num_latent_frames_batch_size = 2
self.num_sample_frames_batch_size = 8
# We make the minimum height and width of sample for tiling half that of the generally supported
self.tile_sample_min_height = sample_height // 2
self.tile_sample_min_width = sample_width // 2
self.tile_latent_min_height = int(
self.tile_sample_min_height / (2 ** (len(self.config.block_out_channels) - 1))
)
self.tile_latent_min_width = int(self.tile_sample_min_width / (2 ** (len(self.config.block_out_channels) - 1)))
# These are experimental overlap factors that were chosen based on experimentation and seem to work best for
# 720x480 (WxH) resolution. The above resolution is the strongly recommended generation resolution in CogVideoX
# and so the tiling implementation has only been tested on those specific resolutions.
self.tile_overlap_factor_height = 1 / 6
self.tile_overlap_factor_width = 1 / 5
def enable_tiling(
self,
tile_sample_min_height: Optional[int] = None,
tile_sample_min_width: Optional[int] = None,
tile_overlap_factor_height: Optional[float] = None,
tile_overlap_factor_width: Optional[float] = None,
) -> None:
r"""
Enable tiled VAE decoding. When this option is enabled, the VAE will split the input tensor into tiles to
compute decoding and encoding in several steps. This is useful for saving a large amount of memory and to allow
processing larger images.
Args:
tile_sample_min_height (`int`, *optional*):
The minimum height required for a sample to be separated into tiles across the height dimension.
tile_sample_min_width (`int`, *optional*):
The minimum width required for a sample to be separated into tiles across the width dimension.
tile_overlap_factor_height (`int`, *optional*):
The minimum amount of overlap between two consecutive vertical tiles. This is to ensure that there are
no tiling artifacts produced across the height dimension. Must be between 0 and 1. Setting a higher
value might cause more tiles to be processed leading to slow down of the decoding process.
tile_overlap_factor_width (`int`, *optional*):
The minimum amount of overlap between two consecutive horizontal tiles. This is to ensure that there
are no tiling artifacts produced across the width dimension. Must be between 0 and 1. Setting a higher
value might cause more tiles to be processed leading to slow down of the decoding process.
"""
self.use_tiling = True
self.tile_sample_min_height = tile_sample_min_height or self.tile_sample_min_height
self.tile_sample_min_width = tile_sample_min_width or self.tile_sample_min_width
self.tile_latent_min_height = int(
self.tile_sample_min_height / (2 ** (len(self.config.block_out_channels) - 1))
)
self.tile_latent_min_width = int(self.tile_sample_min_width / (2 ** (len(self.config.block_out_channels) - 1)))
self.tile_overlap_factor_height = tile_overlap_factor_height or self.tile_overlap_factor_height
self.tile_overlap_factor_width = tile_overlap_factor_width or self.tile_overlap_factor_width
def disable_tiling(self) -> None:
r"""
Disable tiled VAE decoding. If `enable_tiling` was previously enabled, this method will go back to computing
decoding in one step.
"""
self.use_tiling = False
def enable_slicing(self) -> None:
r"""
Enable sliced VAE decoding. When this option is enabled, the VAE will split the input tensor in slices to
compute decoding in several steps. This is useful to save some memory and allow larger batch sizes.
"""
self.use_slicing = True
def disable_slicing(self) -> None:
r"""
Disable sliced VAE decoding. If `enable_slicing` was previously enabled, this method will go back to computing
decoding in one step.
"""
self.use_slicing = False
def _encode(self, x: torch.Tensor) -> torch.Tensor:
batch_size, num_channels, num_frames, height, width = x.shape
if self.use_tiling and (width > self.tile_sample_min_width or height > self.tile_sample_min_height):
return self.tiled_encode(x)
frame_batch_size = self.num_sample_frames_batch_size
# Note: We expect the number of frames to be either `1` or `frame_batch_size * k` or `frame_batch_size * k + 1` for some k.
# As the extra single frame is handled inside the loop, it is not required to round up here.
num_batches = max(num_frames // frame_batch_size, 1)
conv_cache = None
enc = []
for i in range(num_batches):
remaining_frames = num_frames % frame_batch_size
start_frame = frame_batch_size * i + (0 if i == 0 else remaining_frames)
end_frame = frame_batch_size * (i + 1) + remaining_frames
x_intermediate = x[:, :, start_frame:end_frame]
x_intermediate, conv_cache = self.encoder(x_intermediate, conv_cache=conv_cache)
if self.quant_conv is not None:
x_intermediate = self.quant_conv(x_intermediate)
enc.append(x_intermediate)
enc = torch.cat(enc, dim=2)
return enc
@apply_forward_hook
def encode(
self, x: torch.Tensor, return_dict: bool = True
) -> Union[AutoencoderKLOutput, Tuple[DiagonalGaussianDistribution]]:
"""
Encode a batch of images into latents.
Args:
x (`torch.Tensor`): Input batch of images.
return_dict (`bool`, *optional*, defaults to `True`):
Whether to return a [`~models.autoencoder_kl.AutoencoderKLOutput`] instead of a plain tuple.
Returns:
The latent representations of the encoded videos. If `return_dict` is True, a
[`~models.autoencoder_kl.AutoencoderKLOutput`] is returned, otherwise a plain `tuple` is returned.
"""
if self.use_slicing and x.shape[0] > 1:
encoded_slices = [self._encode(x_slice) for x_slice in x.split(1)]
h = torch.cat(encoded_slices)
else:
h = self._encode(x)
posterior = DiagonalGaussianDistribution(h)
if not return_dict:
return (posterior,)
return AutoencoderKLOutput(latent_dist=posterior)
def _decode(self, z: torch.Tensor, return_dict: bool = True) -> Union[DecoderOutput, torch.Tensor]:
batch_size, num_channels, num_frames, height, width = z.shape
if self.use_tiling and (width > self.tile_latent_min_width or height > self.tile_latent_min_height):
return self.tiled_decode(z, return_dict=return_dict)
frame_batch_size = self.num_latent_frames_batch_size
num_batches = max(num_frames // frame_batch_size, 1)
conv_cache = None
dec = []
for i in range(num_batches):
remaining_frames = num_frames % frame_batch_size
start_frame = frame_batch_size * i + (0 if i == 0 else remaining_frames)
end_frame = frame_batch_size * (i + 1) + remaining_frames
z_intermediate = z[:, :, start_frame:end_frame]
if self.post_quant_conv is not None:
z_intermediate = self.post_quant_conv(z_intermediate)
z_intermediate, conv_cache = self.decoder(z_intermediate, conv_cache=conv_cache)
dec.append(z_intermediate)
dec = torch.cat(dec, dim=2)
if not return_dict:
return (dec,)
return DecoderOutput(sample=dec)
@apply_forward_hook
def decode(self, z: torch.Tensor, return_dict: bool = True) -> Union[DecoderOutput, torch.Tensor]:
"""
Decode a batch of images.
Args:
z (`torch.Tensor`): Input batch of latent vectors.
return_dict (`bool`, *optional*, defaults to `True`):
Whether to return a [`~models.vae.DecoderOutput`] instead of a plain tuple.
Returns:
[`~models.vae.DecoderOutput`] or `tuple`:
If return_dict is True, a [`~models.vae.DecoderOutput`] is returned, otherwise a plain `tuple` is
returned.
"""
if self.use_slicing and z.shape[0] > 1:
decoded_slices = [self._decode(z_slice).sample for z_slice in z.split(1)]
decoded = torch.cat(decoded_slices)
else:
decoded = self._decode(z).sample
if not return_dict:
return (decoded,)
return DecoderOutput(sample=decoded)
def blend_v(self, a: torch.Tensor, b: torch.Tensor, blend_extent: int) -> torch.Tensor:
blend_extent = min(a.shape[3], b.shape[3], blend_extent)
for y in range(blend_extent):
b[:, :, :, y, :] = a[:, :, :, -blend_extent + y, :] * (1 - y / blend_extent) + b[:, :, :, y, :] * (
y / blend_extent
)
return b
def blend_h(self, a: torch.Tensor, b: torch.Tensor, blend_extent: int) -> torch.Tensor:
blend_extent = min(a.shape[4], b.shape[4], blend_extent)
for x in range(blend_extent):
b[:, :, :, :, x] = a[:, :, :, :, -blend_extent + x] * (1 - x / blend_extent) + b[:, :, :, :, x] * (
x / blend_extent
)
return b
def tiled_encode(self, x: torch.Tensor) -> torch.Tensor:
r"""Encode a batch of images using a tiled encoder.
When this option is enabled, the VAE will split the input tensor into tiles to compute encoding in several
steps. This is useful to keep memory use constant regardless of image size. The end result of tiled encoding is
different from non-tiled encoding because each tile uses a different encoder. To avoid tiling artifacts, the
tiles overlap and are blended together to form a smooth output. You may still see tile-sized changes in the
output, but they should be much less noticeable.
Args:
x (`torch.Tensor`): Input batch of videos.
Returns:
`torch.Tensor`:
The latent representation of the encoded videos.
"""
# For a rough memory estimate, take a look at the `tiled_decode` method.
batch_size, num_channels, num_frames, height, width = x.shape
overlap_height = int(self.tile_sample_min_height * (1 - self.tile_overlap_factor_height))
overlap_width = int(self.tile_sample_min_width * (1 - self.tile_overlap_factor_width))
blend_extent_height = int(self.tile_latent_min_height * self.tile_overlap_factor_height)
blend_extent_width = int(self.tile_latent_min_width * self.tile_overlap_factor_width)
row_limit_height = self.tile_latent_min_height - blend_extent_height
row_limit_width = self.tile_latent_min_width - blend_extent_width
frame_batch_size = self.num_sample_frames_batch_size
# Split x into overlapping tiles and encode them separately.
# The tiles have an overlap to avoid seams between tiles.
rows = []
for i in range(0, height, overlap_height):
row = []
for j in range(0, width, overlap_width):
# Note: We expect the number of frames to be either `1` or `frame_batch_size * k` or `frame_batch_size * k + 1` for some k.
# As the extra single frame is handled inside the loop, it is not required to round up here.
num_batches = max(num_frames // frame_batch_size, 1)
conv_cache = None
time = []
for k in range(num_batches):
remaining_frames = num_frames % frame_batch_size
start_frame = frame_batch_size * k + (0 if k == 0 else remaining_frames)
end_frame = frame_batch_size * (k + 1) + remaining_frames
tile = x[
:,
:,
start_frame:end_frame,
i : i + self.tile_sample_min_height,
j : j + self.tile_sample_min_width,
]
tile, conv_cache = self.encoder(tile, conv_cache=conv_cache)
if self.quant_conv is not None:
tile = self.quant_conv(tile)
time.append(tile)
row.append(torch.cat(time, dim=2))
rows.append(row)
result_rows = []
for i, row in enumerate(rows):
result_row = []
for j, tile in enumerate(row):
# blend the above tile and the left tile
# to the current tile and add the current tile to the result row
if i > 0:
tile = self.blend_v(rows[i - 1][j], tile, blend_extent_height)
if j > 0:
tile = self.blend_h(row[j - 1], tile, blend_extent_width)
result_row.append(tile[:, :, :, :row_limit_height, :row_limit_width])
result_rows.append(torch.cat(result_row, dim=4))
enc = torch.cat(result_rows, dim=3)
return enc
def tiled_decode(self, z: torch.Tensor, return_dict: bool = True) -> Union[DecoderOutput, torch.Tensor]:
r"""
Decode a batch of images using a tiled decoder.
Args:
z (`torch.Tensor`): Input batch of latent vectors.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~models.vae.DecoderOutput`] instead of a plain tuple.
Returns:
[`~models.vae.DecoderOutput`] or `tuple`:
If return_dict is True, a [`~models.vae.DecoderOutput`] is returned, otherwise a plain `tuple` is
returned.
"""
# Rough memory assessment:
# - In CogVideoX-2B, there are a total of 24 CausalConv3d layers.
# - The biggest intermediate dimensions are: [1, 128, 9, 480, 720].
# - Assume fp16 (2 bytes per value).
# Memory required: 1 * 128 * 9 * 480 * 720 * 24 * 2 / 1024**3 = 17.8 GB
#
# Memory assessment when using tiling:
# - Assume everything as above but now HxW is 240x360 by tiling in half
# Memory required: 1 * 128 * 9 * 240 * 360 * 24 * 2 / 1024**3 = 4.5 GB
batch_size, num_channels, num_frames, height, width = z.shape
overlap_height = int(self.tile_latent_min_height * (1 - self.tile_overlap_factor_height))
overlap_width = int(self.tile_latent_min_width * (1 - self.tile_overlap_factor_width))
blend_extent_height = int(self.tile_sample_min_height * self.tile_overlap_factor_height)
blend_extent_width = int(self.tile_sample_min_width * self.tile_overlap_factor_width)
row_limit_height = self.tile_sample_min_height - blend_extent_height
row_limit_width = self.tile_sample_min_width - blend_extent_width
frame_batch_size = self.num_latent_frames_batch_size
# Split z into overlapping tiles and decode them separately.
# The tiles have an overlap to avoid seams between tiles.
rows = []
for i in range(0, height, overlap_height):
row = []
for j in range(0, width, overlap_width):
num_batches = max(num_frames // frame_batch_size, 1)
conv_cache = None
time = []
for k in range(num_batches):
remaining_frames = num_frames % frame_batch_size
start_frame = frame_batch_size * k + (0 if k == 0 else remaining_frames)
end_frame = frame_batch_size * (k + 1) + remaining_frames
tile = z[
:,
:,
start_frame:end_frame,
i : i + self.tile_latent_min_height,
j : j + self.tile_latent_min_width,
]
if self.post_quant_conv is not None:
tile = self.post_quant_conv(tile)
tile, conv_cache = self.decoder(tile, conv_cache=conv_cache)
time.append(tile)
row.append(torch.cat(time, dim=2))
rows.append(row)
result_rows = []
for i, row in enumerate(rows):
result_row = []
for j, tile in enumerate(row):
# blend the above tile and the left tile
# to the current tile and add the current tile to the result row
if i > 0:
tile = self.blend_v(rows[i - 1][j], tile, blend_extent_height)
if j > 0:
tile = self.blend_h(row[j - 1], tile, blend_extent_width)
result_row.append(tile[:, :, :, :row_limit_height, :row_limit_width])
result_rows.append(torch.cat(result_row, dim=4))
dec = torch.cat(result_rows, dim=3)
if not return_dict:
return (dec,)
return DecoderOutput(sample=dec)
def forward(
self,
sample: torch.Tensor,
sample_posterior: bool = False,
return_dict: bool = True,
generator: Optional[torch.Generator] = None,
) -> Union[torch.Tensor, torch.Tensor]:
x = sample
posterior = self.encode(x).latent_dist
if sample_posterior:
z = posterior.sample(generator=generator)
else:
z = posterior.mode()
dec = self.decode(z).sample
if not return_dict:
return (dec,)
return DecoderOutput(sample=dec)
| diffusers/src/diffusers/models/autoencoders/autoencoder_kl_cogvideox.py/0 | {
"file_path": "diffusers/src/diffusers/models/autoencoders/autoencoder_kl_cogvideox.py",
"repo_id": "diffusers",
"token_count": 28358
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from dataclasses import dataclass
from typing import Any, Dict, List, Optional, Tuple, Union
import torch
from torch import nn
from torch.nn import functional as F
from ...configuration_utils import ConfigMixin, register_to_config
from ...loaders.single_file_model import FromOriginalModelMixin
from ...utils import BaseOutput, logging
from ..attention_processor import (
ADDED_KV_ATTENTION_PROCESSORS,
CROSS_ATTENTION_PROCESSORS,
AttentionProcessor,
AttnAddedKVProcessor,
AttnProcessor,
)
from ..embeddings import TextImageProjection, TextImageTimeEmbedding, TextTimeEmbedding, TimestepEmbedding, Timesteps
from ..modeling_utils import ModelMixin
from ..unets.unet_2d_blocks import (
UNetMidBlock2D,
UNetMidBlock2DCrossAttn,
get_down_block,
)
from ..unets.unet_2d_condition import UNet2DConditionModel
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
@dataclass
class ControlNetOutput(BaseOutput):
"""
The output of [`ControlNetModel`].
Args:
down_block_res_samples (`tuple[torch.Tensor]`):
A tuple of downsample activations at different resolutions for each downsampling block. Each tensor should
be of shape `(batch_size, channel * resolution, height //resolution, width // resolution)`. Output can be
used to condition the original UNet's downsampling activations.
mid_down_block_re_sample (`torch.Tensor`):
The activation of the middle block (the lowest sample resolution). Each tensor should be of shape
`(batch_size, channel * lowest_resolution, height // lowest_resolution, width // lowest_resolution)`.
Output can be used to condition the original UNet's middle block activation.
"""
down_block_res_samples: Tuple[torch.Tensor]
mid_block_res_sample: torch.Tensor
class ControlNetConditioningEmbedding(nn.Module):
"""
Quoting from https://arxiv.org/abs/2302.05543: "Stable Diffusion uses a pre-processing method similar to VQ-GAN
[11] to convert the entire dataset of 512 × 512 images into smaller 64 × 64 “latent images” for stabilized
training. This requires ControlNets to convert image-based conditions to 64 × 64 feature space to match the
convolution size. We use a tiny network E(·) of four convolution layers with 4 × 4 kernels and 2 × 2 strides
(activated by ReLU, channels are 16, 32, 64, 128, initialized with Gaussian weights, trained jointly with the full
model) to encode image-space conditions ... into feature maps ..."
"""
def __init__(
self,
conditioning_embedding_channels: int,
conditioning_channels: int = 3,
block_out_channels: Tuple[int, ...] = (16, 32, 96, 256),
):
super().__init__()
self.conv_in = nn.Conv2d(conditioning_channels, block_out_channels[0], kernel_size=3, padding=1)
self.blocks = nn.ModuleList([])
for i in range(len(block_out_channels) - 1):
channel_in = block_out_channels[i]
channel_out = block_out_channels[i + 1]
self.blocks.append(nn.Conv2d(channel_in, channel_in, kernel_size=3, padding=1))
self.blocks.append(nn.Conv2d(channel_in, channel_out, kernel_size=3, padding=1, stride=2))
self.conv_out = zero_module(
nn.Conv2d(block_out_channels[-1], conditioning_embedding_channels, kernel_size=3, padding=1)
)
def forward(self, conditioning):
embedding = self.conv_in(conditioning)
embedding = F.silu(embedding)
for block in self.blocks:
embedding = block(embedding)
embedding = F.silu(embedding)
embedding = self.conv_out(embedding)
return embedding
class ControlNetModel(ModelMixin, ConfigMixin, FromOriginalModelMixin):
"""
A ControlNet model.
Args:
in_channels (`int`, defaults to 4):
The number of channels in the input sample.
flip_sin_to_cos (`bool`, defaults to `True`):
Whether to flip the sin to cos in the time embedding.
freq_shift (`int`, defaults to 0):
The frequency shift to apply to the time embedding.
down_block_types (`tuple[str]`, defaults to `("CrossAttnDownBlock2D", "CrossAttnDownBlock2D", "CrossAttnDownBlock2D", "DownBlock2D")`):
The tuple of downsample blocks to use.
only_cross_attention (`Union[bool, Tuple[bool]]`, defaults to `False`):
block_out_channels (`tuple[int]`, defaults to `(320, 640, 1280, 1280)`):
The tuple of output channels for each block.
layers_per_block (`int`, defaults to 2):
The number of layers per block.
downsample_padding (`int`, defaults to 1):
The padding to use for the downsampling convolution.
mid_block_scale_factor (`float`, defaults to 1):
The scale factor to use for the mid block.
act_fn (`str`, defaults to "silu"):
The activation function to use.
norm_num_groups (`int`, *optional*, defaults to 32):
The number of groups to use for the normalization. If None, normalization and activation layers is skipped
in post-processing.
norm_eps (`float`, defaults to 1e-5):
The epsilon to use for the normalization.
cross_attention_dim (`int`, defaults to 1280):
The dimension of the cross attention features.
transformer_layers_per_block (`int` or `Tuple[int]`, *optional*, defaults to 1):
The number of transformer blocks of type [`~models.attention.BasicTransformerBlock`]. Only relevant for
[`~models.unet_2d_blocks.CrossAttnDownBlock2D`], [`~models.unet_2d_blocks.CrossAttnUpBlock2D`],
[`~models.unet_2d_blocks.UNetMidBlock2DCrossAttn`].
encoder_hid_dim (`int`, *optional*, defaults to None):
If `encoder_hid_dim_type` is defined, `encoder_hidden_states` will be projected from `encoder_hid_dim`
dimension to `cross_attention_dim`.
encoder_hid_dim_type (`str`, *optional*, defaults to `None`):
If given, the `encoder_hidden_states` and potentially other embeddings are down-projected to text
embeddings of dimension `cross_attention` according to `encoder_hid_dim_type`.
attention_head_dim (`Union[int, Tuple[int]]`, defaults to 8):
The dimension of the attention heads.
use_linear_projection (`bool`, defaults to `False`):
class_embed_type (`str`, *optional*, defaults to `None`):
The type of class embedding to use which is ultimately summed with the time embeddings. Choose from None,
`"timestep"`, `"identity"`, `"projection"`, or `"simple_projection"`.
addition_embed_type (`str`, *optional*, defaults to `None`):
Configures an optional embedding which will be summed with the time embeddings. Choose from `None` or
"text". "text" will use the `TextTimeEmbedding` layer.
num_class_embeds (`int`, *optional*, defaults to 0):
Input dimension of the learnable embedding matrix to be projected to `time_embed_dim`, when performing
class conditioning with `class_embed_type` equal to `None`.
upcast_attention (`bool`, defaults to `False`):
resnet_time_scale_shift (`str`, defaults to `"default"`):
Time scale shift config for ResNet blocks (see `ResnetBlock2D`). Choose from `default` or `scale_shift`.
projection_class_embeddings_input_dim (`int`, *optional*, defaults to `None`):
The dimension of the `class_labels` input when `class_embed_type="projection"`. Required when
`class_embed_type="projection"`.
controlnet_conditioning_channel_order (`str`, defaults to `"rgb"`):
The channel order of conditional image. Will convert to `rgb` if it's `bgr`.
conditioning_embedding_out_channels (`tuple[int]`, *optional*, defaults to `(16, 32, 96, 256)`):
The tuple of output channel for each block in the `conditioning_embedding` layer.
global_pool_conditions (`bool`, defaults to `False`):
TODO(Patrick) - unused parameter.
addition_embed_type_num_heads (`int`, defaults to 64):
The number of heads to use for the `TextTimeEmbedding` layer.
"""
_supports_gradient_checkpointing = True
@register_to_config
def __init__(
self,
in_channels: int = 4,
conditioning_channels: int = 3,
flip_sin_to_cos: bool = True,
freq_shift: int = 0,
down_block_types: Tuple[str, ...] = (
"CrossAttnDownBlock2D",
"CrossAttnDownBlock2D",
"CrossAttnDownBlock2D",
"DownBlock2D",
),
mid_block_type: Optional[str] = "UNetMidBlock2DCrossAttn",
only_cross_attention: Union[bool, Tuple[bool]] = False,
block_out_channels: Tuple[int, ...] = (320, 640, 1280, 1280),
layers_per_block: int = 2,
downsample_padding: int = 1,
mid_block_scale_factor: float = 1,
act_fn: str = "silu",
norm_num_groups: Optional[int] = 32,
norm_eps: float = 1e-5,
cross_attention_dim: int = 1280,
transformer_layers_per_block: Union[int, Tuple[int, ...]] = 1,
encoder_hid_dim: Optional[int] = None,
encoder_hid_dim_type: Optional[str] = None,
attention_head_dim: Union[int, Tuple[int, ...]] = 8,
num_attention_heads: Optional[Union[int, Tuple[int, ...]]] = None,
use_linear_projection: bool = False,
class_embed_type: Optional[str] = None,
addition_embed_type: Optional[str] = None,
addition_time_embed_dim: Optional[int] = None,
num_class_embeds: Optional[int] = None,
upcast_attention: bool = False,
resnet_time_scale_shift: str = "default",
projection_class_embeddings_input_dim: Optional[int] = None,
controlnet_conditioning_channel_order: str = "rgb",
conditioning_embedding_out_channels: Optional[Tuple[int, ...]] = (16, 32, 96, 256),
global_pool_conditions: bool = False,
addition_embed_type_num_heads: int = 64,
):
super().__init__()
# If `num_attention_heads` is not defined (which is the case for most models)
# it will default to `attention_head_dim`. This looks weird upon first reading it and it is.
# The reason for this behavior is to correct for incorrectly named variables that were introduced
# when this library was created. The incorrect naming was only discovered much later in https://github.com/huggingface/diffusers/issues/2011#issuecomment-1547958131
# Changing `attention_head_dim` to `num_attention_heads` for 40,000+ configurations is too backwards breaking
# which is why we correct for the naming here.
num_attention_heads = num_attention_heads or attention_head_dim
# Check inputs
if len(block_out_channels) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `block_out_channels` as `down_block_types`. `block_out_channels`: {block_out_channels}. `down_block_types`: {down_block_types}."
)
if not isinstance(only_cross_attention, bool) and len(only_cross_attention) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `only_cross_attention` as `down_block_types`. `only_cross_attention`: {only_cross_attention}. `down_block_types`: {down_block_types}."
)
if not isinstance(num_attention_heads, int) and len(num_attention_heads) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `num_attention_heads` as `down_block_types`. `num_attention_heads`: {num_attention_heads}. `down_block_types`: {down_block_types}."
)
if isinstance(transformer_layers_per_block, int):
transformer_layers_per_block = [transformer_layers_per_block] * len(down_block_types)
# input
conv_in_kernel = 3
conv_in_padding = (conv_in_kernel - 1) // 2
self.conv_in = nn.Conv2d(
in_channels, block_out_channels[0], kernel_size=conv_in_kernel, padding=conv_in_padding
)
# time
time_embed_dim = block_out_channels[0] * 4
self.time_proj = Timesteps(block_out_channels[0], flip_sin_to_cos, freq_shift)
timestep_input_dim = block_out_channels[0]
self.time_embedding = TimestepEmbedding(
timestep_input_dim,
time_embed_dim,
act_fn=act_fn,
)
if encoder_hid_dim_type is None and encoder_hid_dim is not None:
encoder_hid_dim_type = "text_proj"
self.register_to_config(encoder_hid_dim_type=encoder_hid_dim_type)
logger.info("encoder_hid_dim_type defaults to 'text_proj' as `encoder_hid_dim` is defined.")
if encoder_hid_dim is None and encoder_hid_dim_type is not None:
raise ValueError(
f"`encoder_hid_dim` has to be defined when `encoder_hid_dim_type` is set to {encoder_hid_dim_type}."
)
if encoder_hid_dim_type == "text_proj":
self.encoder_hid_proj = nn.Linear(encoder_hid_dim, cross_attention_dim)
elif encoder_hid_dim_type == "text_image_proj":
# image_embed_dim DOESN'T have to be `cross_attention_dim`. To not clutter the __init__ too much
# they are set to `cross_attention_dim` here as this is exactly the required dimension for the currently only use
# case when `addition_embed_type == "text_image_proj"` (Kandinsky 2.1)`
self.encoder_hid_proj = TextImageProjection(
text_embed_dim=encoder_hid_dim,
image_embed_dim=cross_attention_dim,
cross_attention_dim=cross_attention_dim,
)
elif encoder_hid_dim_type is not None:
raise ValueError(
f"encoder_hid_dim_type: {encoder_hid_dim_type} must be None, 'text_proj' or 'text_image_proj'."
)
else:
self.encoder_hid_proj = None
# class embedding
if class_embed_type is None and num_class_embeds is not None:
self.class_embedding = nn.Embedding(num_class_embeds, time_embed_dim)
elif class_embed_type == "timestep":
self.class_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim)
elif class_embed_type == "identity":
self.class_embedding = nn.Identity(time_embed_dim, time_embed_dim)
elif class_embed_type == "projection":
if projection_class_embeddings_input_dim is None:
raise ValueError(
"`class_embed_type`: 'projection' requires `projection_class_embeddings_input_dim` be set"
)
# The projection `class_embed_type` is the same as the timestep `class_embed_type` except
# 1. the `class_labels` inputs are not first converted to sinusoidal embeddings
# 2. it projects from an arbitrary input dimension.
#
# Note that `TimestepEmbedding` is quite general, being mainly linear layers and activations.
# When used for embedding actual timesteps, the timesteps are first converted to sinusoidal embeddings.
# As a result, `TimestepEmbedding` can be passed arbitrary vectors.
self.class_embedding = TimestepEmbedding(projection_class_embeddings_input_dim, time_embed_dim)
else:
self.class_embedding = None
if addition_embed_type == "text":
if encoder_hid_dim is not None:
text_time_embedding_from_dim = encoder_hid_dim
else:
text_time_embedding_from_dim = cross_attention_dim
self.add_embedding = TextTimeEmbedding(
text_time_embedding_from_dim, time_embed_dim, num_heads=addition_embed_type_num_heads
)
elif addition_embed_type == "text_image":
# text_embed_dim and image_embed_dim DON'T have to be `cross_attention_dim`. To not clutter the __init__ too much
# they are set to `cross_attention_dim` here as this is exactly the required dimension for the currently only use
# case when `addition_embed_type == "text_image"` (Kandinsky 2.1)`
self.add_embedding = TextImageTimeEmbedding(
text_embed_dim=cross_attention_dim, image_embed_dim=cross_attention_dim, time_embed_dim=time_embed_dim
)
elif addition_embed_type == "text_time":
self.add_time_proj = Timesteps(addition_time_embed_dim, flip_sin_to_cos, freq_shift)
self.add_embedding = TimestepEmbedding(projection_class_embeddings_input_dim, time_embed_dim)
elif addition_embed_type is not None:
raise ValueError(f"addition_embed_type: {addition_embed_type} must be None, 'text' or 'text_image'.")
# control net conditioning embedding
self.controlnet_cond_embedding = ControlNetConditioningEmbedding(
conditioning_embedding_channels=block_out_channels[0],
block_out_channels=conditioning_embedding_out_channels,
conditioning_channels=conditioning_channels,
)
self.down_blocks = nn.ModuleList([])
self.controlnet_down_blocks = nn.ModuleList([])
if isinstance(only_cross_attention, bool):
only_cross_attention = [only_cross_attention] * len(down_block_types)
if isinstance(attention_head_dim, int):
attention_head_dim = (attention_head_dim,) * len(down_block_types)
if isinstance(num_attention_heads, int):
num_attention_heads = (num_attention_heads,) * len(down_block_types)
# down
output_channel = block_out_channels[0]
controlnet_block = nn.Conv2d(output_channel, output_channel, kernel_size=1)
controlnet_block = zero_module(controlnet_block)
self.controlnet_down_blocks.append(controlnet_block)
for i, down_block_type in enumerate(down_block_types):
input_channel = output_channel
output_channel = block_out_channels[i]
is_final_block = i == len(block_out_channels) - 1
down_block = get_down_block(
down_block_type,
num_layers=layers_per_block,
transformer_layers_per_block=transformer_layers_per_block[i],
in_channels=input_channel,
out_channels=output_channel,
temb_channels=time_embed_dim,
add_downsample=not is_final_block,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
cross_attention_dim=cross_attention_dim,
num_attention_heads=num_attention_heads[i],
attention_head_dim=attention_head_dim[i] if attention_head_dim[i] is not None else output_channel,
downsample_padding=downsample_padding,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention[i],
upcast_attention=upcast_attention,
resnet_time_scale_shift=resnet_time_scale_shift,
)
self.down_blocks.append(down_block)
for _ in range(layers_per_block):
controlnet_block = nn.Conv2d(output_channel, output_channel, kernel_size=1)
controlnet_block = zero_module(controlnet_block)
self.controlnet_down_blocks.append(controlnet_block)
if not is_final_block:
controlnet_block = nn.Conv2d(output_channel, output_channel, kernel_size=1)
controlnet_block = zero_module(controlnet_block)
self.controlnet_down_blocks.append(controlnet_block)
# mid
mid_block_channel = block_out_channels[-1]
controlnet_block = nn.Conv2d(mid_block_channel, mid_block_channel, kernel_size=1)
controlnet_block = zero_module(controlnet_block)
self.controlnet_mid_block = controlnet_block
if mid_block_type == "UNetMidBlock2DCrossAttn":
self.mid_block = UNetMidBlock2DCrossAttn(
transformer_layers_per_block=transformer_layers_per_block[-1],
in_channels=mid_block_channel,
temb_channels=time_embed_dim,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
resnet_time_scale_shift=resnet_time_scale_shift,
cross_attention_dim=cross_attention_dim,
num_attention_heads=num_attention_heads[-1],
resnet_groups=norm_num_groups,
use_linear_projection=use_linear_projection,
upcast_attention=upcast_attention,
)
elif mid_block_type == "UNetMidBlock2D":
self.mid_block = UNetMidBlock2D(
in_channels=block_out_channels[-1],
temb_channels=time_embed_dim,
num_layers=0,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
resnet_groups=norm_num_groups,
resnet_time_scale_shift=resnet_time_scale_shift,
add_attention=False,
)
else:
raise ValueError(f"unknown mid_block_type : {mid_block_type}")
@classmethod
def from_unet(
cls,
unet: UNet2DConditionModel,
controlnet_conditioning_channel_order: str = "rgb",
conditioning_embedding_out_channels: Optional[Tuple[int, ...]] = (16, 32, 96, 256),
load_weights_from_unet: bool = True,
conditioning_channels: int = 3,
):
r"""
Instantiate a [`ControlNetModel`] from [`UNet2DConditionModel`].
Parameters:
unet (`UNet2DConditionModel`):
The UNet model weights to copy to the [`ControlNetModel`]. All configuration options are also copied
where applicable.
"""
transformer_layers_per_block = (
unet.config.transformer_layers_per_block if "transformer_layers_per_block" in unet.config else 1
)
encoder_hid_dim = unet.config.encoder_hid_dim if "encoder_hid_dim" in unet.config else None
encoder_hid_dim_type = unet.config.encoder_hid_dim_type if "encoder_hid_dim_type" in unet.config else None
addition_embed_type = unet.config.addition_embed_type if "addition_embed_type" in unet.config else None
addition_time_embed_dim = (
unet.config.addition_time_embed_dim if "addition_time_embed_dim" in unet.config else None
)
controlnet = cls(
encoder_hid_dim=encoder_hid_dim,
encoder_hid_dim_type=encoder_hid_dim_type,
addition_embed_type=addition_embed_type,
addition_time_embed_dim=addition_time_embed_dim,
transformer_layers_per_block=transformer_layers_per_block,
in_channels=unet.config.in_channels,
flip_sin_to_cos=unet.config.flip_sin_to_cos,
freq_shift=unet.config.freq_shift,
down_block_types=unet.config.down_block_types,
only_cross_attention=unet.config.only_cross_attention,
block_out_channels=unet.config.block_out_channels,
layers_per_block=unet.config.layers_per_block,
downsample_padding=unet.config.downsample_padding,
mid_block_scale_factor=unet.config.mid_block_scale_factor,
act_fn=unet.config.act_fn,
norm_num_groups=unet.config.norm_num_groups,
norm_eps=unet.config.norm_eps,
cross_attention_dim=unet.config.cross_attention_dim,
attention_head_dim=unet.config.attention_head_dim,
num_attention_heads=unet.config.num_attention_heads,
use_linear_projection=unet.config.use_linear_projection,
class_embed_type=unet.config.class_embed_type,
num_class_embeds=unet.config.num_class_embeds,
upcast_attention=unet.config.upcast_attention,
resnet_time_scale_shift=unet.config.resnet_time_scale_shift,
projection_class_embeddings_input_dim=unet.config.projection_class_embeddings_input_dim,
mid_block_type=unet.config.mid_block_type,
controlnet_conditioning_channel_order=controlnet_conditioning_channel_order,
conditioning_embedding_out_channels=conditioning_embedding_out_channels,
conditioning_channels=conditioning_channels,
)
if load_weights_from_unet:
controlnet.conv_in.load_state_dict(unet.conv_in.state_dict())
controlnet.time_proj.load_state_dict(unet.time_proj.state_dict())
controlnet.time_embedding.load_state_dict(unet.time_embedding.state_dict())
if controlnet.class_embedding:
controlnet.class_embedding.load_state_dict(unet.class_embedding.state_dict())
if hasattr(controlnet, "add_embedding"):
controlnet.add_embedding.load_state_dict(unet.add_embedding.state_dict())
controlnet.down_blocks.load_state_dict(unet.down_blocks.state_dict())
controlnet.mid_block.load_state_dict(unet.mid_block.state_dict())
return controlnet
@property
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel.attn_processors
def attn_processors(self) -> Dict[str, AttentionProcessor]:
r"""
Returns:
`dict` of attention processors: A dictionary containing all attention processors used in the model with
indexed by its weight name.
"""
# set recursively
processors = {}
def fn_recursive_add_processors(name: str, module: torch.nn.Module, processors: Dict[str, AttentionProcessor]):
if hasattr(module, "get_processor"):
processors[f"{name}.processor"] = module.get_processor()
for sub_name, child in module.named_children():
fn_recursive_add_processors(f"{name}.{sub_name}", child, processors)
return processors
for name, module in self.named_children():
fn_recursive_add_processors(name, module, processors)
return processors
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel.set_attn_processor
def set_attn_processor(self, processor: Union[AttentionProcessor, Dict[str, AttentionProcessor]]):
r"""
Sets the attention processor to use to compute attention.
Parameters:
processor (`dict` of `AttentionProcessor` or only `AttentionProcessor`):
The instantiated processor class or a dictionary of processor classes that will be set as the processor
for **all** `Attention` layers.
If `processor` is a dict, the key needs to define the path to the corresponding cross attention
processor. This is strongly recommended when setting trainable attention processors.
"""
count = len(self.attn_processors.keys())
if isinstance(processor, dict) and len(processor) != count:
raise ValueError(
f"A dict of processors was passed, but the number of processors {len(processor)} does not match the"
f" number of attention layers: {count}. Please make sure to pass {count} processor classes."
)
def fn_recursive_attn_processor(name: str, module: torch.nn.Module, processor):
if hasattr(module, "set_processor"):
if not isinstance(processor, dict):
module.set_processor(processor)
else:
module.set_processor(processor.pop(f"{name}.processor"))
for sub_name, child in module.named_children():
fn_recursive_attn_processor(f"{name}.{sub_name}", child, processor)
for name, module in self.named_children():
fn_recursive_attn_processor(name, module, processor)
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel.set_default_attn_processor
def set_default_attn_processor(self):
"""
Disables custom attention processors and sets the default attention implementation.
"""
if all(proc.__class__ in ADDED_KV_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnAddedKVProcessor()
elif all(proc.__class__ in CROSS_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnProcessor()
else:
raise ValueError(
f"Cannot call `set_default_attn_processor` when attention processors are of type {next(iter(self.attn_processors.values()))}"
)
self.set_attn_processor(processor)
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel.set_attention_slice
def set_attention_slice(self, slice_size: Union[str, int, List[int]]) -> None:
r"""
Enable sliced attention computation.
When this option is enabled, the attention module splits the input tensor in slices to compute attention in
several steps. This is useful for saving some memory in exchange for a small decrease in speed.
Args:
slice_size (`str` or `int` or `list(int)`, *optional*, defaults to `"auto"`):
When `"auto"`, input to the attention heads is halved, so attention is computed in two steps. If
`"max"`, maximum amount of memory is saved by running only one slice at a time. If a number is
provided, uses as many slices as `attention_head_dim // slice_size`. In this case, `attention_head_dim`
must be a multiple of `slice_size`.
"""
sliceable_head_dims = []
def fn_recursive_retrieve_sliceable_dims(module: torch.nn.Module):
if hasattr(module, "set_attention_slice"):
sliceable_head_dims.append(module.sliceable_head_dim)
for child in module.children():
fn_recursive_retrieve_sliceable_dims(child)
# retrieve number of attention layers
for module in self.children():
fn_recursive_retrieve_sliceable_dims(module)
num_sliceable_layers = len(sliceable_head_dims)
if slice_size == "auto":
# half the attention head size is usually a good trade-off between
# speed and memory
slice_size = [dim // 2 for dim in sliceable_head_dims]
elif slice_size == "max":
# make smallest slice possible
slice_size = num_sliceable_layers * [1]
slice_size = num_sliceable_layers * [slice_size] if not isinstance(slice_size, list) else slice_size
if len(slice_size) != len(sliceable_head_dims):
raise ValueError(
f"You have provided {len(slice_size)}, but {self.config} has {len(sliceable_head_dims)} different"
f" attention layers. Make sure to match `len(slice_size)` to be {len(sliceable_head_dims)}."
)
for i in range(len(slice_size)):
size = slice_size[i]
dim = sliceable_head_dims[i]
if size is not None and size > dim:
raise ValueError(f"size {size} has to be smaller or equal to {dim}.")
# Recursively walk through all the children.
# Any children which exposes the set_attention_slice method
# gets the message
def fn_recursive_set_attention_slice(module: torch.nn.Module, slice_size: List[int]):
if hasattr(module, "set_attention_slice"):
module.set_attention_slice(slice_size.pop())
for child in module.children():
fn_recursive_set_attention_slice(child, slice_size)
reversed_slice_size = list(reversed(slice_size))
for module in self.children():
fn_recursive_set_attention_slice(module, reversed_slice_size)
def forward(
self,
sample: torch.Tensor,
timestep: Union[torch.Tensor, float, int],
encoder_hidden_states: torch.Tensor,
controlnet_cond: torch.Tensor,
conditioning_scale: float = 1.0,
class_labels: Optional[torch.Tensor] = None,
timestep_cond: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
added_cond_kwargs: Optional[Dict[str, torch.Tensor]] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
guess_mode: bool = False,
return_dict: bool = True,
) -> Union[ControlNetOutput, Tuple[Tuple[torch.Tensor, ...], torch.Tensor]]:
"""
The [`ControlNetModel`] forward method.
Args:
sample (`torch.Tensor`):
The noisy input tensor.
timestep (`Union[torch.Tensor, float, int]`):
The number of timesteps to denoise an input.
encoder_hidden_states (`torch.Tensor`):
The encoder hidden states.
controlnet_cond (`torch.Tensor`):
The conditional input tensor of shape `(batch_size, sequence_length, hidden_size)`.
conditioning_scale (`float`, defaults to `1.0`):
The scale factor for ControlNet outputs.
class_labels (`torch.Tensor`, *optional*, defaults to `None`):
Optional class labels for conditioning. Their embeddings will be summed with the timestep embeddings.
timestep_cond (`torch.Tensor`, *optional*, defaults to `None`):
Additional conditional embeddings for timestep. If provided, the embeddings will be summed with the
timestep_embedding passed through the `self.time_embedding` layer to obtain the final timestep
embeddings.
attention_mask (`torch.Tensor`, *optional*, defaults to `None`):
An attention mask of shape `(batch, key_tokens)` is applied to `encoder_hidden_states`. If `1` the mask
is kept, otherwise if `0` it is discarded. Mask will be converted into a bias, which adds large
negative values to the attention scores corresponding to "discard" tokens.
added_cond_kwargs (`dict`):
Additional conditions for the Stable Diffusion XL UNet.
cross_attention_kwargs (`dict[str]`, *optional*, defaults to `None`):
A kwargs dictionary that if specified is passed along to the `AttnProcessor`.
guess_mode (`bool`, defaults to `False`):
In this mode, the ControlNet encoder tries its best to recognize the input content of the input even if
you remove all prompts. A `guidance_scale` between 3.0 and 5.0 is recommended.
return_dict (`bool`, defaults to `True`):
Whether or not to return a [`~models.controlnets.controlnet.ControlNetOutput`] instead of a plain
tuple.
Returns:
[`~models.controlnets.controlnet.ControlNetOutput`] **or** `tuple`:
If `return_dict` is `True`, a [`~models.controlnets.controlnet.ControlNetOutput`] is returned,
otherwise a tuple is returned where the first element is the sample tensor.
"""
# check channel order
channel_order = self.config.controlnet_conditioning_channel_order
if channel_order == "rgb":
# in rgb order by default
...
elif channel_order == "bgr":
controlnet_cond = torch.flip(controlnet_cond, dims=[1])
else:
raise ValueError(f"unknown `controlnet_conditioning_channel_order`: {channel_order}")
# prepare attention_mask
if attention_mask is not None:
attention_mask = (1 - attention_mask.to(sample.dtype)) * -10000.0
attention_mask = attention_mask.unsqueeze(1)
# 1. time
timesteps = timestep
if not torch.is_tensor(timesteps):
# TODO: this requires sync between CPU and GPU. So try to pass timesteps as tensors if you can
# This would be a good case for the `match` statement (Python 3.10+)
is_mps = sample.device.type == "mps"
is_npu = sample.device.type == "npu"
if isinstance(timestep, float):
dtype = torch.float32 if (is_mps or is_npu) else torch.float64
else:
dtype = torch.int32 if (is_mps or is_npu) else torch.int64
timesteps = torch.tensor([timesteps], dtype=dtype, device=sample.device)
elif len(timesteps.shape) == 0:
timesteps = timesteps[None].to(sample.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps.expand(sample.shape[0])
t_emb = self.time_proj(timesteps)
# timesteps does not contain any weights and will always return f32 tensors
# but time_embedding might actually be running in fp16. so we need to cast here.
# there might be better ways to encapsulate this.
t_emb = t_emb.to(dtype=sample.dtype)
emb = self.time_embedding(t_emb, timestep_cond)
aug_emb = None
if self.class_embedding is not None:
if class_labels is None:
raise ValueError("class_labels should be provided when num_class_embeds > 0")
if self.config.class_embed_type == "timestep":
class_labels = self.time_proj(class_labels)
class_emb = self.class_embedding(class_labels).to(dtype=self.dtype)
emb = emb + class_emb
if self.config.addition_embed_type is not None:
if self.config.addition_embed_type == "text":
aug_emb = self.add_embedding(encoder_hidden_states)
elif self.config.addition_embed_type == "text_time":
if "text_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `text_embeds` to be passed in `added_cond_kwargs`"
)
text_embeds = added_cond_kwargs.get("text_embeds")
if "time_ids" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `time_ids` to be passed in `added_cond_kwargs`"
)
time_ids = added_cond_kwargs.get("time_ids")
time_embeds = self.add_time_proj(time_ids.flatten())
time_embeds = time_embeds.reshape((text_embeds.shape[0], -1))
add_embeds = torch.concat([text_embeds, time_embeds], dim=-1)
add_embeds = add_embeds.to(emb.dtype)
aug_emb = self.add_embedding(add_embeds)
emb = emb + aug_emb if aug_emb is not None else emb
# 2. pre-process
sample = self.conv_in(sample)
controlnet_cond = self.controlnet_cond_embedding(controlnet_cond)
sample = sample + controlnet_cond
# 3. down
down_block_res_samples = (sample,)
for downsample_block in self.down_blocks:
if hasattr(downsample_block, "has_cross_attention") and downsample_block.has_cross_attention:
sample, res_samples = downsample_block(
hidden_states=sample,
temb=emb,
encoder_hidden_states=encoder_hidden_states,
attention_mask=attention_mask,
cross_attention_kwargs=cross_attention_kwargs,
)
else:
sample, res_samples = downsample_block(hidden_states=sample, temb=emb)
down_block_res_samples += res_samples
# 4. mid
if self.mid_block is not None:
if hasattr(self.mid_block, "has_cross_attention") and self.mid_block.has_cross_attention:
sample = self.mid_block(
sample,
emb,
encoder_hidden_states=encoder_hidden_states,
attention_mask=attention_mask,
cross_attention_kwargs=cross_attention_kwargs,
)
else:
sample = self.mid_block(sample, emb)
# 5. Control net blocks
controlnet_down_block_res_samples = ()
for down_block_res_sample, controlnet_block in zip(down_block_res_samples, self.controlnet_down_blocks):
down_block_res_sample = controlnet_block(down_block_res_sample)
controlnet_down_block_res_samples = controlnet_down_block_res_samples + (down_block_res_sample,)
down_block_res_samples = controlnet_down_block_res_samples
mid_block_res_sample = self.controlnet_mid_block(sample)
# 6. scaling
if guess_mode and not self.config.global_pool_conditions:
scales = torch.logspace(-1, 0, len(down_block_res_samples) + 1, device=sample.device) # 0.1 to 1.0
scales = scales * conditioning_scale
down_block_res_samples = [sample * scale for sample, scale in zip(down_block_res_samples, scales)]
mid_block_res_sample = mid_block_res_sample * scales[-1] # last one
else:
down_block_res_samples = [sample * conditioning_scale for sample in down_block_res_samples]
mid_block_res_sample = mid_block_res_sample * conditioning_scale
if self.config.global_pool_conditions:
down_block_res_samples = [
torch.mean(sample, dim=(2, 3), keepdim=True) for sample in down_block_res_samples
]
mid_block_res_sample = torch.mean(mid_block_res_sample, dim=(2, 3), keepdim=True)
if not return_dict:
return (down_block_res_samples, mid_block_res_sample)
return ControlNetOutput(
down_block_res_samples=down_block_res_samples, mid_block_res_sample=mid_block_res_sample
)
def zero_module(module):
for p in module.parameters():
nn.init.zeros_(p)
return module
| diffusers/src/diffusers/models/controlnets/controlnet.py/0 | {
"file_path": "diffusers/src/diffusers/models/controlnets/controlnet.py",
"repo_id": "diffusers",
"token_count": 18810
} |
from dataclasses import dataclass
from ..utils import BaseOutput
@dataclass
class AutoencoderKLOutput(BaseOutput):
"""
Output of AutoencoderKL encoding method.
Args:
latent_dist (`DiagonalGaussianDistribution`):
Encoded outputs of `Encoder` represented as the mean and logvar of `DiagonalGaussianDistribution`.
`DiagonalGaussianDistribution` allows for sampling latents from the distribution.
"""
latent_dist: "DiagonalGaussianDistribution" # noqa: F821
@dataclass
class Transformer2DModelOutput(BaseOutput):
"""
The output of [`Transformer2DModel`].
Args:
sample (`torch.Tensor` of shape `(batch_size, num_channels, height, width)` or `(batch size, num_vector_embeds - 1, num_latent_pixels)` if [`Transformer2DModel`] is discrete):
The hidden states output conditioned on the `encoder_hidden_states` input. If discrete, returns probability
distributions for the unnoised latent pixels.
"""
sample: "torch.Tensor" # noqa: F821
| diffusers/src/diffusers/models/modeling_outputs.py/0 | {
"file_path": "diffusers/src/diffusers/models/modeling_outputs.py",
"repo_id": "diffusers",
"token_count": 377
} |
from dataclasses import dataclass
from typing import Dict, Optional, Union
import torch
import torch.nn.functional as F
from torch import nn
from ...configuration_utils import ConfigMixin, register_to_config
from ...loaders import PeftAdapterMixin, UNet2DConditionLoadersMixin
from ...utils import BaseOutput
from ..attention import BasicTransformerBlock
from ..attention_processor import (
ADDED_KV_ATTENTION_PROCESSORS,
CROSS_ATTENTION_PROCESSORS,
AttentionProcessor,
AttnAddedKVProcessor,
AttnProcessor,
)
from ..embeddings import TimestepEmbedding, Timesteps
from ..modeling_utils import ModelMixin
@dataclass
class PriorTransformerOutput(BaseOutput):
"""
The output of [`PriorTransformer`].
Args:
predicted_image_embedding (`torch.Tensor` of shape `(batch_size, embedding_dim)`):
The predicted CLIP image embedding conditioned on the CLIP text embedding input.
"""
predicted_image_embedding: torch.Tensor
class PriorTransformer(ModelMixin, ConfigMixin, UNet2DConditionLoadersMixin, PeftAdapterMixin):
"""
A Prior Transformer model.
Parameters:
num_attention_heads (`int`, *optional*, defaults to 32): The number of heads to use for multi-head attention.
attention_head_dim (`int`, *optional*, defaults to 64): The number of channels in each head.
num_layers (`int`, *optional*, defaults to 20): The number of layers of Transformer blocks to use.
embedding_dim (`int`, *optional*, defaults to 768): The dimension of the model input `hidden_states`
num_embeddings (`int`, *optional*, defaults to 77):
The number of embeddings of the model input `hidden_states`
additional_embeddings (`int`, *optional*, defaults to 4): The number of additional tokens appended to the
projected `hidden_states`. The actual length of the used `hidden_states` is `num_embeddings +
additional_embeddings`.
dropout (`float`, *optional*, defaults to 0.0): The dropout probability to use.
time_embed_act_fn (`str`, *optional*, defaults to 'silu'):
The activation function to use to create timestep embeddings.
norm_in_type (`str`, *optional*, defaults to None): The normalization layer to apply on hidden states before
passing to Transformer blocks. Set it to `None` if normalization is not needed.
embedding_proj_norm_type (`str`, *optional*, defaults to None):
The normalization layer to apply on the input `proj_embedding`. Set it to `None` if normalization is not
needed.
encoder_hid_proj_type (`str`, *optional*, defaults to `linear`):
The projection layer to apply on the input `encoder_hidden_states`. Set it to `None` if
`encoder_hidden_states` is `None`.
added_emb_type (`str`, *optional*, defaults to `prd`): Additional embeddings to condition the model.
Choose from `prd` or `None`. if choose `prd`, it will prepend a token indicating the (quantized) dot
product between the text embedding and image embedding as proposed in the unclip paper
https://arxiv.org/abs/2204.06125 If it is `None`, no additional embeddings will be prepended.
time_embed_dim (`int, *optional*, defaults to None): The dimension of timestep embeddings.
If None, will be set to `num_attention_heads * attention_head_dim`
embedding_proj_dim (`int`, *optional*, default to None):
The dimension of `proj_embedding`. If None, will be set to `embedding_dim`.
clip_embed_dim (`int`, *optional*, default to None):
The dimension of the output. If None, will be set to `embedding_dim`.
"""
@register_to_config
def __init__(
self,
num_attention_heads: int = 32,
attention_head_dim: int = 64,
num_layers: int = 20,
embedding_dim: int = 768,
num_embeddings=77,
additional_embeddings=4,
dropout: float = 0.0,
time_embed_act_fn: str = "silu",
norm_in_type: Optional[str] = None, # layer
embedding_proj_norm_type: Optional[str] = None, # layer
encoder_hid_proj_type: Optional[str] = "linear", # linear
added_emb_type: Optional[str] = "prd", # prd
time_embed_dim: Optional[int] = None,
embedding_proj_dim: Optional[int] = None,
clip_embed_dim: Optional[int] = None,
):
super().__init__()
self.num_attention_heads = num_attention_heads
self.attention_head_dim = attention_head_dim
inner_dim = num_attention_heads * attention_head_dim
self.additional_embeddings = additional_embeddings
time_embed_dim = time_embed_dim or inner_dim
embedding_proj_dim = embedding_proj_dim or embedding_dim
clip_embed_dim = clip_embed_dim or embedding_dim
self.time_proj = Timesteps(inner_dim, True, 0)
self.time_embedding = TimestepEmbedding(inner_dim, time_embed_dim, out_dim=inner_dim, act_fn=time_embed_act_fn)
self.proj_in = nn.Linear(embedding_dim, inner_dim)
if embedding_proj_norm_type is None:
self.embedding_proj_norm = None
elif embedding_proj_norm_type == "layer":
self.embedding_proj_norm = nn.LayerNorm(embedding_proj_dim)
else:
raise ValueError(f"unsupported embedding_proj_norm_type: {embedding_proj_norm_type}")
self.embedding_proj = nn.Linear(embedding_proj_dim, inner_dim)
if encoder_hid_proj_type is None:
self.encoder_hidden_states_proj = None
elif encoder_hid_proj_type == "linear":
self.encoder_hidden_states_proj = nn.Linear(embedding_dim, inner_dim)
else:
raise ValueError(f"unsupported encoder_hid_proj_type: {encoder_hid_proj_type}")
self.positional_embedding = nn.Parameter(torch.zeros(1, num_embeddings + additional_embeddings, inner_dim))
if added_emb_type == "prd":
self.prd_embedding = nn.Parameter(torch.zeros(1, 1, inner_dim))
elif added_emb_type is None:
self.prd_embedding = None
else:
raise ValueError(
f"`added_emb_type`: {added_emb_type} is not supported. Make sure to choose one of `'prd'` or `None`."
)
self.transformer_blocks = nn.ModuleList(
[
BasicTransformerBlock(
inner_dim,
num_attention_heads,
attention_head_dim,
dropout=dropout,
activation_fn="gelu",
attention_bias=True,
)
for d in range(num_layers)
]
)
if norm_in_type == "layer":
self.norm_in = nn.LayerNorm(inner_dim)
elif norm_in_type is None:
self.norm_in = None
else:
raise ValueError(f"Unsupported norm_in_type: {norm_in_type}.")
self.norm_out = nn.LayerNorm(inner_dim)
self.proj_to_clip_embeddings = nn.Linear(inner_dim, clip_embed_dim)
causal_attention_mask = torch.full(
[num_embeddings + additional_embeddings, num_embeddings + additional_embeddings], -10000.0
)
causal_attention_mask.triu_(1)
causal_attention_mask = causal_attention_mask[None, ...]
self.register_buffer("causal_attention_mask", causal_attention_mask, persistent=False)
self.clip_mean = nn.Parameter(torch.zeros(1, clip_embed_dim))
self.clip_std = nn.Parameter(torch.zeros(1, clip_embed_dim))
@property
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel.attn_processors
def attn_processors(self) -> Dict[str, AttentionProcessor]:
r"""
Returns:
`dict` of attention processors: A dictionary containing all attention processors used in the model with
indexed by its weight name.
"""
# set recursively
processors = {}
def fn_recursive_add_processors(name: str, module: torch.nn.Module, processors: Dict[str, AttentionProcessor]):
if hasattr(module, "get_processor"):
processors[f"{name}.processor"] = module.get_processor()
for sub_name, child in module.named_children():
fn_recursive_add_processors(f"{name}.{sub_name}", child, processors)
return processors
for name, module in self.named_children():
fn_recursive_add_processors(name, module, processors)
return processors
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel.set_attn_processor
def set_attn_processor(self, processor: Union[AttentionProcessor, Dict[str, AttentionProcessor]]):
r"""
Sets the attention processor to use to compute attention.
Parameters:
processor (`dict` of `AttentionProcessor` or only `AttentionProcessor`):
The instantiated processor class or a dictionary of processor classes that will be set as the processor
for **all** `Attention` layers.
If `processor` is a dict, the key needs to define the path to the corresponding cross attention
processor. This is strongly recommended when setting trainable attention processors.
"""
count = len(self.attn_processors.keys())
if isinstance(processor, dict) and len(processor) != count:
raise ValueError(
f"A dict of processors was passed, but the number of processors {len(processor)} does not match the"
f" number of attention layers: {count}. Please make sure to pass {count} processor classes."
)
def fn_recursive_attn_processor(name: str, module: torch.nn.Module, processor):
if hasattr(module, "set_processor"):
if not isinstance(processor, dict):
module.set_processor(processor)
else:
module.set_processor(processor.pop(f"{name}.processor"))
for sub_name, child in module.named_children():
fn_recursive_attn_processor(f"{name}.{sub_name}", child, processor)
for name, module in self.named_children():
fn_recursive_attn_processor(name, module, processor)
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel.set_default_attn_processor
def set_default_attn_processor(self):
"""
Disables custom attention processors and sets the default attention implementation.
"""
if all(proc.__class__ in ADDED_KV_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnAddedKVProcessor()
elif all(proc.__class__ in CROSS_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnProcessor()
else:
raise ValueError(
f"Cannot call `set_default_attn_processor` when attention processors are of type {next(iter(self.attn_processors.values()))}"
)
self.set_attn_processor(processor)
def forward(
self,
hidden_states,
timestep: Union[torch.Tensor, float, int],
proj_embedding: torch.Tensor,
encoder_hidden_states: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.BoolTensor] = None,
return_dict: bool = True,
):
"""
The [`PriorTransformer`] forward method.
Args:
hidden_states (`torch.Tensor` of shape `(batch_size, embedding_dim)`):
The currently predicted image embeddings.
timestep (`torch.LongTensor`):
Current denoising step.
proj_embedding (`torch.Tensor` of shape `(batch_size, embedding_dim)`):
Projected embedding vector the denoising process is conditioned on.
encoder_hidden_states (`torch.Tensor` of shape `(batch_size, num_embeddings, embedding_dim)`):
Hidden states of the text embeddings the denoising process is conditioned on.
attention_mask (`torch.BoolTensor` of shape `(batch_size, num_embeddings)`):
Text mask for the text embeddings.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~models.transformers.prior_transformer.PriorTransformerOutput`] instead of
a plain tuple.
Returns:
[`~models.transformers.prior_transformer.PriorTransformerOutput`] or `tuple`:
If return_dict is True, a [`~models.transformers.prior_transformer.PriorTransformerOutput`] is
returned, otherwise a tuple is returned where the first element is the sample tensor.
"""
batch_size = hidden_states.shape[0]
timesteps = timestep
if not torch.is_tensor(timesteps):
timesteps = torch.tensor([timesteps], dtype=torch.long, device=hidden_states.device)
elif torch.is_tensor(timesteps) and len(timesteps.shape) == 0:
timesteps = timesteps[None].to(hidden_states.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps * torch.ones(batch_size, dtype=timesteps.dtype, device=timesteps.device)
timesteps_projected = self.time_proj(timesteps)
# timesteps does not contain any weights and will always return f32 tensors
# but time_embedding might be fp16, so we need to cast here.
timesteps_projected = timesteps_projected.to(dtype=self.dtype)
time_embeddings = self.time_embedding(timesteps_projected)
if self.embedding_proj_norm is not None:
proj_embedding = self.embedding_proj_norm(proj_embedding)
proj_embeddings = self.embedding_proj(proj_embedding)
if self.encoder_hidden_states_proj is not None and encoder_hidden_states is not None:
encoder_hidden_states = self.encoder_hidden_states_proj(encoder_hidden_states)
elif self.encoder_hidden_states_proj is not None and encoder_hidden_states is None:
raise ValueError("`encoder_hidden_states_proj` requires `encoder_hidden_states` to be set")
hidden_states = self.proj_in(hidden_states)
positional_embeddings = self.positional_embedding.to(hidden_states.dtype)
additional_embeds = []
additional_embeddings_len = 0
if encoder_hidden_states is not None:
additional_embeds.append(encoder_hidden_states)
additional_embeddings_len += encoder_hidden_states.shape[1]
if len(proj_embeddings.shape) == 2:
proj_embeddings = proj_embeddings[:, None, :]
if len(hidden_states.shape) == 2:
hidden_states = hidden_states[:, None, :]
additional_embeds = additional_embeds + [
proj_embeddings,
time_embeddings[:, None, :],
hidden_states,
]
if self.prd_embedding is not None:
prd_embedding = self.prd_embedding.to(hidden_states.dtype).expand(batch_size, -1, -1)
additional_embeds.append(prd_embedding)
hidden_states = torch.cat(
additional_embeds,
dim=1,
)
# Allow positional_embedding to not include the `addtional_embeddings` and instead pad it with zeros for these additional tokens
additional_embeddings_len = additional_embeddings_len + proj_embeddings.shape[1] + 1
if positional_embeddings.shape[1] < hidden_states.shape[1]:
positional_embeddings = F.pad(
positional_embeddings,
(
0,
0,
additional_embeddings_len,
self.prd_embedding.shape[1] if self.prd_embedding is not None else 0,
),
value=0.0,
)
hidden_states = hidden_states + positional_embeddings
if attention_mask is not None:
attention_mask = (1 - attention_mask.to(hidden_states.dtype)) * -10000.0
attention_mask = F.pad(attention_mask, (0, self.additional_embeddings), value=0.0)
attention_mask = (attention_mask[:, None, :] + self.causal_attention_mask).to(hidden_states.dtype)
attention_mask = attention_mask.repeat_interleave(self.config.num_attention_heads, dim=0)
if self.norm_in is not None:
hidden_states = self.norm_in(hidden_states)
for block in self.transformer_blocks:
hidden_states = block(hidden_states, attention_mask=attention_mask)
hidden_states = self.norm_out(hidden_states)
if self.prd_embedding is not None:
hidden_states = hidden_states[:, -1]
else:
hidden_states = hidden_states[:, additional_embeddings_len:]
predicted_image_embedding = self.proj_to_clip_embeddings(hidden_states)
if not return_dict:
return (predicted_image_embedding,)
return PriorTransformerOutput(predicted_image_embedding=predicted_image_embedding)
def post_process_latents(self, prior_latents):
prior_latents = (prior_latents * self.clip_std) + self.clip_mean
return prior_latents
| diffusers/src/diffusers/models/transformers/prior_transformer.py/0 | {
"file_path": "diffusers/src/diffusers/models/transformers/prior_transformer.py",
"repo_id": "diffusers",
"token_count": 7380
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from dataclasses import dataclass
from typing import Optional, Tuple, Union
import torch
import torch.nn as nn
from ...configuration_utils import ConfigMixin, register_to_config
from ...utils import BaseOutput
from ..embeddings import GaussianFourierProjection, TimestepEmbedding, Timesteps
from ..modeling_utils import ModelMixin
from .unet_2d_blocks import UNetMidBlock2D, get_down_block, get_up_block
@dataclass
class UNet2DOutput(BaseOutput):
"""
The output of [`UNet2DModel`].
Args:
sample (`torch.Tensor` of shape `(batch_size, num_channels, height, width)`):
The hidden states output from the last layer of the model.
"""
sample: torch.Tensor
class UNet2DModel(ModelMixin, ConfigMixin):
r"""
A 2D UNet model that takes a noisy sample and a timestep and returns a sample shaped output.
This model inherits from [`ModelMixin`]. Check the superclass documentation for it's generic methods implemented
for all models (such as downloading or saving).
Parameters:
sample_size (`int` or `Tuple[int, int]`, *optional*, defaults to `None`):
Height and width of input/output sample. Dimensions must be a multiple of `2 ** (len(block_out_channels) -
1)`.
in_channels (`int`, *optional*, defaults to 3): Number of channels in the input sample.
out_channels (`int`, *optional*, defaults to 3): Number of channels in the output.
center_input_sample (`bool`, *optional*, defaults to `False`): Whether to center the input sample.
time_embedding_type (`str`, *optional*, defaults to `"positional"`): Type of time embedding to use.
freq_shift (`int`, *optional*, defaults to 0): Frequency shift for Fourier time embedding.
flip_sin_to_cos (`bool`, *optional*, defaults to `True`):
Whether to flip sin to cos for Fourier time embedding.
down_block_types (`Tuple[str]`, *optional*, defaults to `("DownBlock2D", "AttnDownBlock2D", "AttnDownBlock2D", "AttnDownBlock2D")`):
Tuple of downsample block types.
mid_block_type (`str`, *optional*, defaults to `"UNetMidBlock2D"`):
Block type for middle of UNet, it can be either `UNetMidBlock2D` or `None`.
up_block_types (`Tuple[str]`, *optional*, defaults to `("AttnUpBlock2D", "AttnUpBlock2D", "AttnUpBlock2D", "UpBlock2D")`):
Tuple of upsample block types.
block_out_channels (`Tuple[int]`, *optional*, defaults to `(224, 448, 672, 896)`):
Tuple of block output channels.
layers_per_block (`int`, *optional*, defaults to `2`): The number of layers per block.
mid_block_scale_factor (`float`, *optional*, defaults to `1`): The scale factor for the mid block.
downsample_padding (`int`, *optional*, defaults to `1`): The padding for the downsample convolution.
downsample_type (`str`, *optional*, defaults to `conv`):
The downsample type for downsampling layers. Choose between "conv" and "resnet"
upsample_type (`str`, *optional*, defaults to `conv`):
The upsample type for upsampling layers. Choose between "conv" and "resnet"
dropout (`float`, *optional*, defaults to 0.0): The dropout probability to use.
act_fn (`str`, *optional*, defaults to `"silu"`): The activation function to use.
attention_head_dim (`int`, *optional*, defaults to `8`): The attention head dimension.
norm_num_groups (`int`, *optional*, defaults to `32`): The number of groups for normalization.
attn_norm_num_groups (`int`, *optional*, defaults to `None`):
If set to an integer, a group norm layer will be created in the mid block's [`Attention`] layer with the
given number of groups. If left as `None`, the group norm layer will only be created if
`resnet_time_scale_shift` is set to `default`, and if created will have `norm_num_groups` groups.
norm_eps (`float`, *optional*, defaults to `1e-5`): The epsilon for normalization.
resnet_time_scale_shift (`str`, *optional*, defaults to `"default"`): Time scale shift config
for ResNet blocks (see [`~models.resnet.ResnetBlock2D`]). Choose from `default` or `scale_shift`.
class_embed_type (`str`, *optional*, defaults to `None`):
The type of class embedding to use which is ultimately summed with the time embeddings. Choose from `None`,
`"timestep"`, or `"identity"`.
num_class_embeds (`int`, *optional*, defaults to `None`):
Input dimension of the learnable embedding matrix to be projected to `time_embed_dim` when performing class
conditioning with `class_embed_type` equal to `None`.
"""
_supports_gradient_checkpointing = True
_skip_layerwise_casting_patterns = ["norm"]
@register_to_config
def __init__(
self,
sample_size: Optional[Union[int, Tuple[int, int]]] = None,
in_channels: int = 3,
out_channels: int = 3,
center_input_sample: bool = False,
time_embedding_type: str = "positional",
time_embedding_dim: Optional[int] = None,
freq_shift: int = 0,
flip_sin_to_cos: bool = True,
down_block_types: Tuple[str, ...] = ("DownBlock2D", "AttnDownBlock2D", "AttnDownBlock2D", "AttnDownBlock2D"),
mid_block_type: Optional[str] = "UNetMidBlock2D",
up_block_types: Tuple[str, ...] = ("AttnUpBlock2D", "AttnUpBlock2D", "AttnUpBlock2D", "UpBlock2D"),
block_out_channels: Tuple[int, ...] = (224, 448, 672, 896),
layers_per_block: int = 2,
mid_block_scale_factor: float = 1,
downsample_padding: int = 1,
downsample_type: str = "conv",
upsample_type: str = "conv",
dropout: float = 0.0,
act_fn: str = "silu",
attention_head_dim: Optional[int] = 8,
norm_num_groups: int = 32,
attn_norm_num_groups: Optional[int] = None,
norm_eps: float = 1e-5,
resnet_time_scale_shift: str = "default",
add_attention: bool = True,
class_embed_type: Optional[str] = None,
num_class_embeds: Optional[int] = None,
num_train_timesteps: Optional[int] = None,
):
super().__init__()
self.sample_size = sample_size
time_embed_dim = time_embedding_dim or block_out_channels[0] * 4
# Check inputs
if len(down_block_types) != len(up_block_types):
raise ValueError(
f"Must provide the same number of `down_block_types` as `up_block_types`. `down_block_types`: {down_block_types}. `up_block_types`: {up_block_types}."
)
if len(block_out_channels) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `block_out_channels` as `down_block_types`. `block_out_channels`: {block_out_channels}. `down_block_types`: {down_block_types}."
)
# input
self.conv_in = nn.Conv2d(in_channels, block_out_channels[0], kernel_size=3, padding=(1, 1))
# time
if time_embedding_type == "fourier":
self.time_proj = GaussianFourierProjection(embedding_size=block_out_channels[0], scale=16)
timestep_input_dim = 2 * block_out_channels[0]
elif time_embedding_type == "positional":
self.time_proj = Timesteps(block_out_channels[0], flip_sin_to_cos, freq_shift)
timestep_input_dim = block_out_channels[0]
elif time_embedding_type == "learned":
self.time_proj = nn.Embedding(num_train_timesteps, block_out_channels[0])
timestep_input_dim = block_out_channels[0]
self.time_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim)
# class embedding
if class_embed_type is None and num_class_embeds is not None:
self.class_embedding = nn.Embedding(num_class_embeds, time_embed_dim)
elif class_embed_type == "timestep":
self.class_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim)
elif class_embed_type == "identity":
self.class_embedding = nn.Identity(time_embed_dim, time_embed_dim)
else:
self.class_embedding = None
self.down_blocks = nn.ModuleList([])
self.mid_block = None
self.up_blocks = nn.ModuleList([])
# down
output_channel = block_out_channels[0]
for i, down_block_type in enumerate(down_block_types):
input_channel = output_channel
output_channel = block_out_channels[i]
is_final_block = i == len(block_out_channels) - 1
down_block = get_down_block(
down_block_type,
num_layers=layers_per_block,
in_channels=input_channel,
out_channels=output_channel,
temb_channels=time_embed_dim,
add_downsample=not is_final_block,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
attention_head_dim=attention_head_dim if attention_head_dim is not None else output_channel,
downsample_padding=downsample_padding,
resnet_time_scale_shift=resnet_time_scale_shift,
downsample_type=downsample_type,
dropout=dropout,
)
self.down_blocks.append(down_block)
# mid
if mid_block_type is None:
self.mid_block = None
else:
self.mid_block = UNetMidBlock2D(
in_channels=block_out_channels[-1],
temb_channels=time_embed_dim,
dropout=dropout,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
resnet_time_scale_shift=resnet_time_scale_shift,
attention_head_dim=attention_head_dim if attention_head_dim is not None else block_out_channels[-1],
resnet_groups=norm_num_groups,
attn_groups=attn_norm_num_groups,
add_attention=add_attention,
)
# up
reversed_block_out_channels = list(reversed(block_out_channels))
output_channel = reversed_block_out_channels[0]
for i, up_block_type in enumerate(up_block_types):
prev_output_channel = output_channel
output_channel = reversed_block_out_channels[i]
input_channel = reversed_block_out_channels[min(i + 1, len(block_out_channels) - 1)]
is_final_block = i == len(block_out_channels) - 1
up_block = get_up_block(
up_block_type,
num_layers=layers_per_block + 1,
in_channels=input_channel,
out_channels=output_channel,
prev_output_channel=prev_output_channel,
temb_channels=time_embed_dim,
add_upsample=not is_final_block,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
attention_head_dim=attention_head_dim if attention_head_dim is not None else output_channel,
resnet_time_scale_shift=resnet_time_scale_shift,
upsample_type=upsample_type,
dropout=dropout,
)
self.up_blocks.append(up_block)
prev_output_channel = output_channel
# out
num_groups_out = norm_num_groups if norm_num_groups is not None else min(block_out_channels[0] // 4, 32)
self.conv_norm_out = nn.GroupNorm(num_channels=block_out_channels[0], num_groups=num_groups_out, eps=norm_eps)
self.conv_act = nn.SiLU()
self.conv_out = nn.Conv2d(block_out_channels[0], out_channels, kernel_size=3, padding=1)
def forward(
self,
sample: torch.Tensor,
timestep: Union[torch.Tensor, float, int],
class_labels: Optional[torch.Tensor] = None,
return_dict: bool = True,
) -> Union[UNet2DOutput, Tuple]:
r"""
The [`UNet2DModel`] forward method.
Args:
sample (`torch.Tensor`):
The noisy input tensor with the following shape `(batch, channel, height, width)`.
timestep (`torch.Tensor` or `float` or `int`): The number of timesteps to denoise an input.
class_labels (`torch.Tensor`, *optional*, defaults to `None`):
Optional class labels for conditioning. Their embeddings will be summed with the timestep embeddings.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~models.unets.unet_2d.UNet2DOutput`] instead of a plain tuple.
Returns:
[`~models.unets.unet_2d.UNet2DOutput`] or `tuple`:
If `return_dict` is True, an [`~models.unets.unet_2d.UNet2DOutput`] is returned, otherwise a `tuple` is
returned where the first element is the sample tensor.
"""
# 0. center input if necessary
if self.config.center_input_sample:
sample = 2 * sample - 1.0
# 1. time
timesteps = timestep
if not torch.is_tensor(timesteps):
timesteps = torch.tensor([timesteps], dtype=torch.long, device=sample.device)
elif torch.is_tensor(timesteps) and len(timesteps.shape) == 0:
timesteps = timesteps[None].to(sample.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps * torch.ones(sample.shape[0], dtype=timesteps.dtype, device=timesteps.device)
t_emb = self.time_proj(timesteps)
# timesteps does not contain any weights and will always return f32 tensors
# but time_embedding might actually be running in fp16. so we need to cast here.
# there might be better ways to encapsulate this.
t_emb = t_emb.to(dtype=self.dtype)
emb = self.time_embedding(t_emb)
if self.class_embedding is not None:
if class_labels is None:
raise ValueError("class_labels should be provided when doing class conditioning")
if self.config.class_embed_type == "timestep":
class_labels = self.time_proj(class_labels)
class_emb = self.class_embedding(class_labels).to(dtype=self.dtype)
emb = emb + class_emb
elif self.class_embedding is None and class_labels is not None:
raise ValueError("class_embedding needs to be initialized in order to use class conditioning")
# 2. pre-process
skip_sample = sample
sample = self.conv_in(sample)
# 3. down
down_block_res_samples = (sample,)
for downsample_block in self.down_blocks:
if hasattr(downsample_block, "skip_conv"):
sample, res_samples, skip_sample = downsample_block(
hidden_states=sample, temb=emb, skip_sample=skip_sample
)
else:
sample, res_samples = downsample_block(hidden_states=sample, temb=emb)
down_block_res_samples += res_samples
# 4. mid
if self.mid_block is not None:
sample = self.mid_block(sample, emb)
# 5. up
skip_sample = None
for upsample_block in self.up_blocks:
res_samples = down_block_res_samples[-len(upsample_block.resnets) :]
down_block_res_samples = down_block_res_samples[: -len(upsample_block.resnets)]
if hasattr(upsample_block, "skip_conv"):
sample, skip_sample = upsample_block(sample, res_samples, emb, skip_sample)
else:
sample = upsample_block(sample, res_samples, emb)
# 6. post-process
sample = self.conv_norm_out(sample)
sample = self.conv_act(sample)
sample = self.conv_out(sample)
if skip_sample is not None:
sample += skip_sample
if self.config.time_embedding_type == "fourier":
timesteps = timesteps.reshape((sample.shape[0], *([1] * len(sample.shape[1:]))))
sample = sample / timesteps
if not return_dict:
return (sample,)
return UNet2DOutput(sample=sample)
| diffusers/src/diffusers/models/unets/unet_2d.py/0 | {
"file_path": "diffusers/src/diffusers/models/unets/unet_2d.py",
"repo_id": "diffusers",
"token_count": 7460
} |
# coding=utf-8
# Copyright 2025 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""PyTorch optimization for diffusion models."""
import math
from enum import Enum
from typing import Optional, Union
from torch.optim import Optimizer
from torch.optim.lr_scheduler import LambdaLR
from .utils import logging
logger = logging.get_logger(__name__)
class SchedulerType(Enum):
LINEAR = "linear"
COSINE = "cosine"
COSINE_WITH_RESTARTS = "cosine_with_restarts"
POLYNOMIAL = "polynomial"
CONSTANT = "constant"
CONSTANT_WITH_WARMUP = "constant_with_warmup"
PIECEWISE_CONSTANT = "piecewise_constant"
def get_constant_schedule(optimizer: Optimizer, last_epoch: int = -1) -> LambdaLR:
"""
Create a schedule with a constant learning rate, using the learning rate set in optimizer.
Args:
optimizer ([`~torch.optim.Optimizer`]):
The optimizer for which to schedule the learning rate.
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
Return:
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
"""
return LambdaLR(optimizer, lambda _: 1, last_epoch=last_epoch)
def get_constant_schedule_with_warmup(optimizer: Optimizer, num_warmup_steps: int, last_epoch: int = -1) -> LambdaLR:
"""
Create a schedule with a constant learning rate preceded by a warmup period during which the learning rate
increases linearly between 0 and the initial lr set in the optimizer.
Args:
optimizer ([`~torch.optim.Optimizer`]):
The optimizer for which to schedule the learning rate.
num_warmup_steps (`int`):
The number of steps for the warmup phase.
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
Return:
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
"""
def lr_lambda(current_step: int):
if current_step < num_warmup_steps:
return float(current_step) / float(max(1.0, num_warmup_steps))
return 1.0
return LambdaLR(optimizer, lr_lambda, last_epoch=last_epoch)
def get_piecewise_constant_schedule(optimizer: Optimizer, step_rules: str, last_epoch: int = -1) -> LambdaLR:
"""
Create a schedule with a constant learning rate, using the learning rate set in optimizer.
Args:
optimizer ([`~torch.optim.Optimizer`]):
The optimizer for which to schedule the learning rate.
step_rules (`string`):
The rules for the learning rate. ex: rule_steps="1:10,0.1:20,0.01:30,0.005" it means that the learning rate
if multiple 1 for the first 10 steps, multiple 0.1 for the next 20 steps, multiple 0.01 for the next 30
steps and multiple 0.005 for the other steps.
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
Return:
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
"""
rules_dict = {}
rule_list = step_rules.split(",")
for rule_str in rule_list[:-1]:
value_str, steps_str = rule_str.split(":")
steps = int(steps_str)
value = float(value_str)
rules_dict[steps] = value
last_lr_multiple = float(rule_list[-1])
def create_rules_function(rules_dict, last_lr_multiple):
def rule_func(steps: int) -> float:
sorted_steps = sorted(rules_dict.keys())
for i, sorted_step in enumerate(sorted_steps):
if steps < sorted_step:
return rules_dict[sorted_steps[i]]
return last_lr_multiple
return rule_func
rules_func = create_rules_function(rules_dict, last_lr_multiple)
return LambdaLR(optimizer, rules_func, last_epoch=last_epoch)
def get_linear_schedule_with_warmup(
optimizer: Optimizer, num_warmup_steps: int, num_training_steps: int, last_epoch: int = -1
) -> LambdaLR:
"""
Create a schedule with a learning rate that decreases linearly from the initial lr set in the optimizer to 0, after
a warmup period during which it increases linearly from 0 to the initial lr set in the optimizer.
Args:
optimizer ([`~torch.optim.Optimizer`]):
The optimizer for which to schedule the learning rate.
num_warmup_steps (`int`):
The number of steps for the warmup phase.
num_training_steps (`int`):
The total number of training steps.
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
Return:
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
"""
def lr_lambda(current_step: int):
if current_step < num_warmup_steps:
return float(current_step) / float(max(1, num_warmup_steps))
return max(
0.0, float(num_training_steps - current_step) / float(max(1, num_training_steps - num_warmup_steps))
)
return LambdaLR(optimizer, lr_lambda, last_epoch)
def get_cosine_schedule_with_warmup(
optimizer: Optimizer, num_warmup_steps: int, num_training_steps: int, num_cycles: float = 0.5, last_epoch: int = -1
) -> LambdaLR:
"""
Create a schedule with a learning rate that decreases following the values of the cosine function between the
initial lr set in the optimizer to 0, after a warmup period during which it increases linearly between 0 and the
initial lr set in the optimizer.
Args:
optimizer ([`~torch.optim.Optimizer`]):
The optimizer for which to schedule the learning rate.
num_warmup_steps (`int`):
The number of steps for the warmup phase.
num_training_steps (`int`):
The total number of training steps.
num_periods (`float`, *optional*, defaults to 0.5):
The number of periods of the cosine function in a schedule (the default is to just decrease from the max
value to 0 following a half-cosine).
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
Return:
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
"""
def lr_lambda(current_step):
if current_step < num_warmup_steps:
return float(current_step) / float(max(1, num_warmup_steps))
progress = float(current_step - num_warmup_steps) / float(max(1, num_training_steps - num_warmup_steps))
return max(0.0, 0.5 * (1.0 + math.cos(math.pi * float(num_cycles) * 2.0 * progress)))
return LambdaLR(optimizer, lr_lambda, last_epoch)
def get_cosine_with_hard_restarts_schedule_with_warmup(
optimizer: Optimizer, num_warmup_steps: int, num_training_steps: int, num_cycles: int = 1, last_epoch: int = -1
) -> LambdaLR:
"""
Create a schedule with a learning rate that decreases following the values of the cosine function between the
initial lr set in the optimizer to 0, with several hard restarts, after a warmup period during which it increases
linearly between 0 and the initial lr set in the optimizer.
Args:
optimizer ([`~torch.optim.Optimizer`]):
The optimizer for which to schedule the learning rate.
num_warmup_steps (`int`):
The number of steps for the warmup phase.
num_training_steps (`int`):
The total number of training steps.
num_cycles (`int`, *optional*, defaults to 1):
The number of hard restarts to use.
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
Return:
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
"""
def lr_lambda(current_step):
if current_step < num_warmup_steps:
return float(current_step) / float(max(1, num_warmup_steps))
progress = float(current_step - num_warmup_steps) / float(max(1, num_training_steps - num_warmup_steps))
if progress >= 1.0:
return 0.0
return max(0.0, 0.5 * (1.0 + math.cos(math.pi * ((float(num_cycles) * progress) % 1.0))))
return LambdaLR(optimizer, lr_lambda, last_epoch)
def get_polynomial_decay_schedule_with_warmup(
optimizer: Optimizer,
num_warmup_steps: int,
num_training_steps: int,
lr_end: float = 1e-7,
power: float = 1.0,
last_epoch: int = -1,
) -> LambdaLR:
"""
Create a schedule with a learning rate that decreases as a polynomial decay from the initial lr set in the
optimizer to end lr defined by *lr_end*, after a warmup period during which it increases linearly from 0 to the
initial lr set in the optimizer.
Args:
optimizer ([`~torch.optim.Optimizer`]):
The optimizer for which to schedule the learning rate.
num_warmup_steps (`int`):
The number of steps for the warmup phase.
num_training_steps (`int`):
The total number of training steps.
lr_end (`float`, *optional*, defaults to 1e-7):
The end LR.
power (`float`, *optional*, defaults to 1.0):
Power factor.
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
Note: *power* defaults to 1.0 as in the fairseq implementation, which in turn is based on the original BERT
implementation at
https://github.com/google-research/bert/blob/f39e881b169b9d53bea03d2d341b31707a6c052b/optimization.py#L37
Return:
`torch.optim.lr_scheduler.LambdaLR` with the appropriate schedule.
"""
lr_init = optimizer.defaults["lr"]
if not (lr_init > lr_end):
raise ValueError(f"lr_end ({lr_end}) must be smaller than initial lr ({lr_init})")
def lr_lambda(current_step: int):
if current_step < num_warmup_steps:
return float(current_step) / float(max(1, num_warmup_steps))
elif current_step > num_training_steps:
return lr_end / lr_init # as LambdaLR multiplies by lr_init
else:
lr_range = lr_init - lr_end
decay_steps = num_training_steps - num_warmup_steps
pct_remaining = 1 - (current_step - num_warmup_steps) / decay_steps
decay = lr_range * pct_remaining**power + lr_end
return decay / lr_init # as LambdaLR multiplies by lr_init
return LambdaLR(optimizer, lr_lambda, last_epoch)
TYPE_TO_SCHEDULER_FUNCTION = {
SchedulerType.LINEAR: get_linear_schedule_with_warmup,
SchedulerType.COSINE: get_cosine_schedule_with_warmup,
SchedulerType.COSINE_WITH_RESTARTS: get_cosine_with_hard_restarts_schedule_with_warmup,
SchedulerType.POLYNOMIAL: get_polynomial_decay_schedule_with_warmup,
SchedulerType.CONSTANT: get_constant_schedule,
SchedulerType.CONSTANT_WITH_WARMUP: get_constant_schedule_with_warmup,
SchedulerType.PIECEWISE_CONSTANT: get_piecewise_constant_schedule,
}
def get_scheduler(
name: Union[str, SchedulerType],
optimizer: Optimizer,
step_rules: Optional[str] = None,
num_warmup_steps: Optional[int] = None,
num_training_steps: Optional[int] = None,
num_cycles: int = 1,
power: float = 1.0,
last_epoch: int = -1,
) -> LambdaLR:
"""
Unified API to get any scheduler from its name.
Args:
name (`str` or `SchedulerType`):
The name of the scheduler to use.
optimizer (`torch.optim.Optimizer`):
The optimizer that will be used during training.
step_rules (`str`, *optional*):
A string representing the step rules to use. This is only used by the `PIECEWISE_CONSTANT` scheduler.
num_warmup_steps (`int`, *optional*):
The number of warmup steps to do. This is not required by all schedulers (hence the argument being
optional), the function will raise an error if it's unset and the scheduler type requires it.
num_training_steps (`int``, *optional*):
The number of training steps to do. This is not required by all schedulers (hence the argument being
optional), the function will raise an error if it's unset and the scheduler type requires it.
num_cycles (`int`, *optional*):
The number of hard restarts used in `COSINE_WITH_RESTARTS` scheduler.
power (`float`, *optional*, defaults to 1.0):
Power factor. See `POLYNOMIAL` scheduler
last_epoch (`int`, *optional*, defaults to -1):
The index of the last epoch when resuming training.
"""
name = SchedulerType(name)
schedule_func = TYPE_TO_SCHEDULER_FUNCTION[name]
if name == SchedulerType.CONSTANT:
return schedule_func(optimizer, last_epoch=last_epoch)
if name == SchedulerType.PIECEWISE_CONSTANT:
return schedule_func(optimizer, step_rules=step_rules, last_epoch=last_epoch)
# All other schedulers require `num_warmup_steps`
if num_warmup_steps is None:
raise ValueError(f"{name} requires `num_warmup_steps`, please provide that argument.")
if name == SchedulerType.CONSTANT_WITH_WARMUP:
return schedule_func(optimizer, num_warmup_steps=num_warmup_steps, last_epoch=last_epoch)
# All other schedulers require `num_training_steps`
if num_training_steps is None:
raise ValueError(f"{name} requires `num_training_steps`, please provide that argument.")
if name == SchedulerType.COSINE_WITH_RESTARTS:
return schedule_func(
optimizer,
num_warmup_steps=num_warmup_steps,
num_training_steps=num_training_steps,
num_cycles=num_cycles,
last_epoch=last_epoch,
)
if name == SchedulerType.POLYNOMIAL:
return schedule_func(
optimizer,
num_warmup_steps=num_warmup_steps,
num_training_steps=num_training_steps,
power=power,
last_epoch=last_epoch,
)
return schedule_func(
optimizer, num_warmup_steps=num_warmup_steps, num_training_steps=num_training_steps, last_epoch=last_epoch
)
| diffusers/src/diffusers/optimization.py/0 | {
"file_path": "diffusers/src/diffusers/optimization.py",
"repo_id": "diffusers",
"token_count": 5885
} |
from typing import TYPE_CHECKING
from ...utils import (
DIFFUSERS_SLOW_IMPORT,
OptionalDependencyNotAvailable,
_LazyModule,
get_objects_from_module,
is_flax_available,
is_torch_available,
is_transformers_available,
)
_dummy_objects = {}
_import_structure = {}
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_torch_and_transformers_objects # noqa F403
_dummy_objects.update(get_objects_from_module(dummy_torch_and_transformers_objects))
else:
_import_structure["pipeline_controlnet_xs"] = ["StableDiffusionControlNetXSPipeline"]
_import_structure["pipeline_controlnet_xs_sd_xl"] = ["StableDiffusionXLControlNetXSPipeline"]
try:
if not (is_transformers_available() and is_flax_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_flax_and_transformers_objects # noqa F403
_dummy_objects.update(get_objects_from_module(dummy_flax_and_transformers_objects))
else:
pass # _import_structure["pipeline_flax_controlnet"] = ["FlaxStableDiffusionControlNetPipeline"]
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_torch_and_transformers_objects import *
else:
from .pipeline_controlnet_xs import StableDiffusionControlNetXSPipeline
from .pipeline_controlnet_xs_sd_xl import StableDiffusionXLControlNetXSPipeline
try:
if not (is_transformers_available() and is_flax_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_flax_and_transformers_objects import * # noqa F403
else:
pass # from .pipeline_flax_controlnet import FlaxStableDiffusionControlNetPipeline
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
for name, value in _dummy_objects.items():
setattr(sys.modules[__name__], name, value)
| diffusers/src/diffusers/pipelines/controlnet_xs/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/controlnet_xs/__init__.py",
"repo_id": "diffusers",
"token_count": 894
} |
from dataclasses import dataclass
from typing import List, Optional, Union
import numpy as np
import PIL.Image
from ...utils import BaseOutput
@dataclass
class IFPipelineOutput(BaseOutput):
r"""
Output class for Stable Diffusion pipelines.
Args:
images (`List[PIL.Image.Image]` or `np.ndarray`):
List of denoised PIL images of length `batch_size` or numpy array of shape `(batch_size, height, width,
num_channels)`. PIL images or numpy array present the denoised images of the diffusion pipeline.
nsfw_detected (`List[bool]`):
List of flags denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content or a watermark. `None` if safety checking could not be performed.
watermark_detected (`List[bool]`):
List of flags denoting whether the corresponding generated image likely has a watermark. `None` if safety
checking could not be performed.
"""
images: Union[List[PIL.Image.Image], np.ndarray]
nsfw_detected: Optional[List[bool]]
watermark_detected: Optional[List[bool]]
| diffusers/src/diffusers/pipelines/deepfloyd_if/pipeline_output.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/deepfloyd_if/pipeline_output.py",
"repo_id": "diffusers",
"token_count": 410
} |
from typing import TYPE_CHECKING
from ....utils import DIFFUSERS_SLOW_IMPORT, _LazyModule
_import_structure = {"pipeline_pndm": ["PNDMPipeline"]}
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
from .pipeline_pndm import PNDMPipeline
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
| diffusers/src/diffusers/pipelines/deprecated/pndm/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/deprecated/pndm/__init__.py",
"repo_id": "diffusers",
"token_count": 182
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import Callable, List, Optional, Union
import numpy as np
import PIL.Image
import torch
from PIL import Image
from ...models import UNet2DConditionModel, VQModel
from ...schedulers import DDPMScheduler
from ...utils import (
is_torch_xla_available,
logging,
)
from ...utils.torch_utils import randn_tensor
from ..pipeline_utils import DiffusionPipeline, ImagePipelineOutput
if is_torch_xla_available():
import torch_xla.core.xla_model as xm
XLA_AVAILABLE = True
else:
XLA_AVAILABLE = False
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import torch
>>> import numpy as np
>>> from diffusers import KandinskyV22PriorEmb2EmbPipeline, KandinskyV22ControlnetImg2ImgPipeline
>>> from transformers import pipeline
>>> from diffusers.utils import load_image
>>> def make_hint(image, depth_estimator):
... image = depth_estimator(image)["depth"]
... image = np.array(image)
... image = image[:, :, None]
... image = np.concatenate([image, image, image], axis=2)
... detected_map = torch.from_numpy(image).float() / 255.0
... hint = detected_map.permute(2, 0, 1)
... return hint
>>> depth_estimator = pipeline("depth-estimation")
>>> pipe_prior = KandinskyV22PriorEmb2EmbPipeline.from_pretrained(
... "kandinsky-community/kandinsky-2-2-prior", torch_dtype=torch.float16
... )
>>> pipe_prior = pipe_prior.to("cuda")
>>> pipe = KandinskyV22ControlnetImg2ImgPipeline.from_pretrained(
... "kandinsky-community/kandinsky-2-2-controlnet-depth", torch_dtype=torch.float16
... )
>>> pipe = pipe.to("cuda")
>>> img = load_image(
... "https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
... "/kandinsky/cat.png"
... ).resize((768, 768))
>>> hint = make_hint(img, depth_estimator).unsqueeze(0).half().to("cuda")
>>> prompt = "A robot, 4k photo"
>>> negative_prior_prompt = "lowres, text, error, cropped, worst quality, low quality, jpeg artifacts, ugly, duplicate, morbid, mutilated, out of frame, extra fingers, mutated hands, poorly drawn hands, poorly drawn face, mutation, deformed, blurry, dehydrated, bad anatomy, bad proportions, extra limbs, cloned face, disfigured, gross proportions, malformed limbs, missing arms, missing legs, extra arms, extra legs, fused fingers, too many fingers, long neck, username, watermark, signature"
>>> generator = torch.Generator(device="cuda").manual_seed(43)
>>> img_emb = pipe_prior(prompt=prompt, image=img, strength=0.85, generator=generator)
>>> negative_emb = pipe_prior(prompt=negative_prior_prompt, image=img, strength=1, generator=generator)
>>> images = pipe(
... image=img,
... strength=0.5,
... image_embeds=img_emb.image_embeds,
... negative_image_embeds=negative_emb.image_embeds,
... hint=hint,
... num_inference_steps=50,
... generator=generator,
... height=768,
... width=768,
... ).images
>>> images[0].save("robot_cat.png")
```
"""
# Copied from diffusers.pipelines.kandinsky2_2.pipeline_kandinsky2_2.downscale_height_and_width
def downscale_height_and_width(height, width, scale_factor=8):
new_height = height // scale_factor**2
if height % scale_factor**2 != 0:
new_height += 1
new_width = width // scale_factor**2
if width % scale_factor**2 != 0:
new_width += 1
return new_height * scale_factor, new_width * scale_factor
# Copied from diffusers.pipelines.kandinsky.pipeline_kandinsky_img2img.prepare_image
def prepare_image(pil_image, w=512, h=512):
pil_image = pil_image.resize((w, h), resample=Image.BICUBIC, reducing_gap=1)
arr = np.array(pil_image.convert("RGB"))
arr = arr.astype(np.float32) / 127.5 - 1
arr = np.transpose(arr, [2, 0, 1])
image = torch.from_numpy(arr).unsqueeze(0)
return image
class KandinskyV22ControlnetImg2ImgPipeline(DiffusionPipeline):
"""
Pipeline for image-to-image generation using Kandinsky
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
Args:
scheduler ([`DDIMScheduler`]):
A scheduler to be used in combination with `unet` to generate image latents.
unet ([`UNet2DConditionModel`]):
Conditional U-Net architecture to denoise the image embedding.
movq ([`VQModel`]):
MoVQ Decoder to generate the image from the latents.
"""
model_cpu_offload_seq = "unet->movq"
def __init__(
self,
unet: UNet2DConditionModel,
scheduler: DDPMScheduler,
movq: VQModel,
):
super().__init__()
self.register_modules(
unet=unet,
scheduler=scheduler,
movq=movq,
)
self.movq_scale_factor = 2 ** (len(self.movq.config.block_out_channels) - 1)
# Copied from diffusers.pipelines.kandinsky.pipeline_kandinsky_img2img.KandinskyImg2ImgPipeline.get_timesteps
def get_timesteps(self, num_inference_steps, strength, device):
# get the original timestep using init_timestep
init_timestep = min(int(num_inference_steps * strength), num_inference_steps)
t_start = max(num_inference_steps - init_timestep, 0)
timesteps = self.scheduler.timesteps[t_start:]
return timesteps, num_inference_steps - t_start
# Copied from diffusers.pipelines.kandinsky2_2.pipeline_kandinsky2_2_img2img.KandinskyV22Img2ImgPipeline.prepare_latents
def prepare_latents(self, image, timestep, batch_size, num_images_per_prompt, dtype, device, generator=None):
if not isinstance(image, (torch.Tensor, PIL.Image.Image, list)):
raise ValueError(
f"`image` has to be of type `torch.Tensor`, `PIL.Image.Image` or list but is {type(image)}"
)
image = image.to(device=device, dtype=dtype)
batch_size = batch_size * num_images_per_prompt
if image.shape[1] == 4:
init_latents = image
else:
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
elif isinstance(generator, list):
init_latents = [
self.movq.encode(image[i : i + 1]).latent_dist.sample(generator[i]) for i in range(batch_size)
]
init_latents = torch.cat(init_latents, dim=0)
else:
init_latents = self.movq.encode(image).latent_dist.sample(generator)
init_latents = self.movq.config.scaling_factor * init_latents
init_latents = torch.cat([init_latents], dim=0)
shape = init_latents.shape
noise = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
# get latents
init_latents = self.scheduler.add_noise(init_latents, noise, timestep)
latents = init_latents
return latents
@torch.no_grad()
def __call__(
self,
image_embeds: Union[torch.Tensor, List[torch.Tensor]],
image: Union[torch.Tensor, PIL.Image.Image, List[torch.Tensor], List[PIL.Image.Image]],
negative_image_embeds: Union[torch.Tensor, List[torch.Tensor]],
hint: torch.Tensor,
height: int = 512,
width: int = 512,
num_inference_steps: int = 100,
guidance_scale: float = 4.0,
strength: float = 0.3,
num_images_per_prompt: int = 1,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
output_type: Optional[str] = "pil",
callback: Optional[Callable[[int, int, torch.Tensor], None]] = None,
callback_steps: int = 1,
return_dict: bool = True,
):
"""
Function invoked when calling the pipeline for generation.
Args:
image_embeds (`torch.Tensor` or `List[torch.Tensor]`):
The clip image embeddings for text prompt, that will be used to condition the image generation.
image (`torch.Tensor`, `PIL.Image.Image`, `np.ndarray`, `List[torch.Tensor]`, `List[PIL.Image.Image]`, or `List[np.ndarray]`):
`Image`, or tensor representing an image batch, that will be used as the starting point for the
process. Can also accept image latents as `image`, if passing latents directly, it will not be encoded
again.
strength (`float`, *optional*, defaults to 0.8):
Conceptually, indicates how much to transform the reference `image`. Must be between 0 and 1. `image`
will be used as a starting point, adding more noise to it the larger the `strength`. The number of
denoising steps depends on the amount of noise initially added. When `strength` is 1, added noise will
be maximum and the denoising process will run for the full number of iterations specified in
`num_inference_steps`. A value of 1, therefore, essentially ignores `image`.
hint (`torch.Tensor`):
The controlnet condition.
negative_image_embeds (`torch.Tensor` or `List[torch.Tensor]`):
The clip image embeddings for negative text prompt, will be used to condition the image generation.
height (`int`, *optional*, defaults to 512):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to 512):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 100):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 4.0):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
One or a list of [torch generator(s)](https://pytorch.org/docs/stable/generated/torch.Generator.html)
to make generation deterministic.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between: `"pil"` (`PIL.Image.Image`), `"np"`
(`np.array`) or `"pt"` (`torch.Tensor`).
callback (`Callable`, *optional*):
A function that calls every `callback_steps` steps during inference. The function is called with the
following arguments: `callback(step: int, timestep: int, latents: torch.Tensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function is called. If not specified, the callback is called at
every step.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.ImagePipelineOutput`] instead of a plain tuple.
Examples:
Returns:
[`~pipelines.ImagePipelineOutput`] or `tuple`
"""
device = self._execution_device
do_classifier_free_guidance = guidance_scale > 1.0
if isinstance(image_embeds, list):
image_embeds = torch.cat(image_embeds, dim=0)
if isinstance(negative_image_embeds, list):
negative_image_embeds = torch.cat(negative_image_embeds, dim=0)
if isinstance(hint, list):
hint = torch.cat(hint, dim=0)
batch_size = image_embeds.shape[0]
if do_classifier_free_guidance:
image_embeds = image_embeds.repeat_interleave(num_images_per_prompt, dim=0)
negative_image_embeds = negative_image_embeds.repeat_interleave(num_images_per_prompt, dim=0)
hint = hint.repeat_interleave(num_images_per_prompt, dim=0)
image_embeds = torch.cat([negative_image_embeds, image_embeds], dim=0).to(
dtype=self.unet.dtype, device=device
)
hint = torch.cat([hint, hint], dim=0).to(dtype=self.unet.dtype, device=device)
if not isinstance(image, list):
image = [image]
if not all(isinstance(i, (PIL.Image.Image, torch.Tensor)) for i in image):
raise ValueError(
f"Input is in incorrect format: {[type(i) for i in image]}. Currently, we only support PIL image and pytorch tensor"
)
image = torch.cat([prepare_image(i, width, height) for i in image], dim=0)
image = image.to(dtype=image_embeds.dtype, device=device)
latents = self.movq.encode(image)["latents"]
latents = latents.repeat_interleave(num_images_per_prompt, dim=0)
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps, num_inference_steps = self.get_timesteps(num_inference_steps, strength, device)
latent_timestep = timesteps[:1].repeat(batch_size * num_images_per_prompt)
height, width = downscale_height_and_width(height, width, self.movq_scale_factor)
latents = self.prepare_latents(
latents, latent_timestep, batch_size, num_images_per_prompt, image_embeds.dtype, device, generator
)
for i, t in enumerate(self.progress_bar(timesteps)):
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
added_cond_kwargs = {"image_embeds": image_embeds, "hint": hint}
noise_pred = self.unet(
sample=latent_model_input,
timestep=t,
encoder_hidden_states=None,
added_cond_kwargs=added_cond_kwargs,
return_dict=False,
)[0]
if do_classifier_free_guidance:
noise_pred, variance_pred = noise_pred.split(latents.shape[1], dim=1)
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
_, variance_pred_text = variance_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
noise_pred = torch.cat([noise_pred, variance_pred_text], dim=1)
if not (
hasattr(self.scheduler.config, "variance_type")
and self.scheduler.config.variance_type in ["learned", "learned_range"]
):
noise_pred, _ = noise_pred.split(latents.shape[1], dim=1)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(
noise_pred,
t,
latents,
generator=generator,
)[0]
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if XLA_AVAILABLE:
xm.mark_step()
# post-processing
image = self.movq.decode(latents, force_not_quantize=True)["sample"]
# Offload all models
self.maybe_free_model_hooks()
if output_type not in ["pt", "np", "pil"]:
raise ValueError(f"Only the output types `pt`, `pil` and `np` are supported not output_type={output_type}")
if output_type in ["np", "pil"]:
image = image * 0.5 + 0.5
image = image.clamp(0, 1)
image = image.cpu().permute(0, 2, 3, 1).float().numpy()
if output_type == "pil":
image = self.numpy_to_pil(image)
if not return_dict:
return (image,)
return ImagePipelineOutput(images=image)
| diffusers/src/diffusers/pipelines/kandinsky2_2/pipeline_kandinsky2_2_controlnet_img2img.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/kandinsky2_2/pipeline_kandinsky2_2_controlnet_img2img.py",
"repo_id": "diffusers",
"token_count": 7641
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
from typing import Callable, List, Optional, Union
import numpy as np
import PIL.Image
import torch
from transformers import CLIPImageProcessor
from ...image_processor import VaeImageProcessor
from ...models import AutoencoderKL, UNet2DConditionModel
from ...schedulers import DDIMScheduler, LMSDiscreteScheduler, PNDMScheduler
from ...utils import deprecate, is_torch_xla_available, logging
from ...utils.torch_utils import randn_tensor
from ..pipeline_utils import DiffusionPipeline, StableDiffusionMixin
from ..stable_diffusion import StableDiffusionPipelineOutput
from ..stable_diffusion.safety_checker import StableDiffusionSafetyChecker
from .image_encoder import PaintByExampleImageEncoder
if is_torch_xla_available():
import torch_xla.core.xla_model as xm
XLA_AVAILABLE = True
else:
XLA_AVAILABLE = False
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_img2img.retrieve_latents
def retrieve_latents(
encoder_output: torch.Tensor, generator: Optional[torch.Generator] = None, sample_mode: str = "sample"
):
if hasattr(encoder_output, "latent_dist") and sample_mode == "sample":
return encoder_output.latent_dist.sample(generator)
elif hasattr(encoder_output, "latent_dist") and sample_mode == "argmax":
return encoder_output.latent_dist.mode()
elif hasattr(encoder_output, "latents"):
return encoder_output.latents
else:
raise AttributeError("Could not access latents of provided encoder_output")
def prepare_mask_and_masked_image(image, mask):
"""
Prepares a pair (image, mask) to be consumed by the Paint by Example pipeline. This means that those inputs will be
converted to ``torch.Tensor`` with shapes ``batch x channels x height x width`` where ``channels`` is ``3`` for the
``image`` and ``1`` for the ``mask``.
The ``image`` will be converted to ``torch.float32`` and normalized to be in ``[-1, 1]``. The ``mask`` will be
binarized (``mask > 0.5``) and cast to ``torch.float32`` too.
Args:
image (Union[np.array, PIL.Image, torch.Tensor]): The image to inpaint.
It can be a ``PIL.Image``, or a ``height x width x 3`` ``np.array`` or a ``channels x height x width``
``torch.Tensor`` or a ``batch x channels x height x width`` ``torch.Tensor``.
mask (_type_): The mask to apply to the image, i.e. regions to inpaint.
It can be a ``PIL.Image``, or a ``height x width`` ``np.array`` or a ``1 x height x width``
``torch.Tensor`` or a ``batch x 1 x height x width`` ``torch.Tensor``.
Raises:
ValueError: ``torch.Tensor`` images should be in the ``[-1, 1]`` range. ValueError: ``torch.Tensor`` mask
should be in the ``[0, 1]`` range. ValueError: ``mask`` and ``image`` should have the same spatial dimensions.
TypeError: ``mask`` is a ``torch.Tensor`` but ``image`` is not
(ot the other way around).
Returns:
tuple[torch.Tensor]: The pair (mask, masked_image) as ``torch.Tensor`` with 4
dimensions: ``batch x channels x height x width``.
"""
if isinstance(image, torch.Tensor):
if not isinstance(mask, torch.Tensor):
raise TypeError(f"`image` is a torch.Tensor but `mask` (type: {type(mask)} is not")
# Batch single image
if image.ndim == 3:
assert image.shape[0] == 3, "Image outside a batch should be of shape (3, H, W)"
image = image.unsqueeze(0)
# Batch and add channel dim for single mask
if mask.ndim == 2:
mask = mask.unsqueeze(0).unsqueeze(0)
# Batch single mask or add channel dim
if mask.ndim == 3:
# Batched mask
if mask.shape[0] == image.shape[0]:
mask = mask.unsqueeze(1)
else:
mask = mask.unsqueeze(0)
assert image.ndim == 4 and mask.ndim == 4, "Image and Mask must have 4 dimensions"
assert image.shape[-2:] == mask.shape[-2:], "Image and Mask must have the same spatial dimensions"
assert image.shape[0] == mask.shape[0], "Image and Mask must have the same batch size"
assert mask.shape[1] == 1, "Mask image must have a single channel"
# Check image is in [-1, 1]
if image.min() < -1 or image.max() > 1:
raise ValueError("Image should be in [-1, 1] range")
# Check mask is in [0, 1]
if mask.min() < 0 or mask.max() > 1:
raise ValueError("Mask should be in [0, 1] range")
# paint-by-example inverses the mask
mask = 1 - mask
# Binarize mask
mask[mask < 0.5] = 0
mask[mask >= 0.5] = 1
# Image as float32
image = image.to(dtype=torch.float32)
elif isinstance(mask, torch.Tensor):
raise TypeError(f"`mask` is a torch.Tensor but `image` (type: {type(image)} is not")
else:
if isinstance(image, PIL.Image.Image):
image = [image]
image = np.concatenate([np.array(i.convert("RGB"))[None, :] for i in image], axis=0)
image = image.transpose(0, 3, 1, 2)
image = torch.from_numpy(image).to(dtype=torch.float32) / 127.5 - 1.0
# preprocess mask
if isinstance(mask, PIL.Image.Image):
mask = [mask]
mask = np.concatenate([np.array(m.convert("L"))[None, None, :] for m in mask], axis=0)
mask = mask.astype(np.float32) / 255.0
# paint-by-example inverses the mask
mask = 1 - mask
mask[mask < 0.5] = 0
mask[mask >= 0.5] = 1
mask = torch.from_numpy(mask)
masked_image = image * mask
return mask, masked_image
class PaintByExamplePipeline(DiffusionPipeline, StableDiffusionMixin):
r"""
<Tip warning={true}>
🧪 This is an experimental feature!
</Tip>
Pipeline for image-guided image inpainting using Stable Diffusion.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) model to encode and decode images to and from latent representations.
image_encoder ([`PaintByExampleImageEncoder`]):
Encodes the example input image. The `unet` is conditioned on the example image instead of a text prompt.
tokenizer ([`~transformers.CLIPTokenizer`]):
A `CLIPTokenizer` to tokenize text.
unet ([`UNet2DConditionModel`]):
A `UNet2DConditionModel` to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Can be one of
[`DDIMScheduler`], [`LMSDiscreteScheduler`], or [`PNDMScheduler`].
safety_checker ([`StableDiffusionSafetyChecker`]):
Classification module that estimates whether generated images could be considered offensive or harmful.
Please refer to the [model card](https://huggingface.co/runwayml/stable-diffusion-v1-5) for more details
about a model's potential harms.
feature_extractor ([`~transformers.CLIPImageProcessor`]):
A `CLIPImageProcessor` to extract features from generated images; used as inputs to the `safety_checker`.
"""
# TODO: feature_extractor is required to encode initial images (if they are in PIL format),
# we should give a descriptive message if the pipeline doesn't have one.
model_cpu_offload_seq = "unet->vae"
_exclude_from_cpu_offload = ["image_encoder"]
_optional_components = ["safety_checker"]
def __init__(
self,
vae: AutoencoderKL,
image_encoder: PaintByExampleImageEncoder,
unet: UNet2DConditionModel,
scheduler: Union[DDIMScheduler, PNDMScheduler, LMSDiscreteScheduler],
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
requires_safety_checker: bool = False,
):
super().__init__()
self.register_modules(
vae=vae,
image_encoder=image_encoder,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1) if getattr(self, "vae", None) else 8
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
self.register_to_config(requires_safety_checker=requires_safety_checker)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.run_safety_checker
def run_safety_checker(self, image, device, dtype):
if self.safety_checker is None:
has_nsfw_concept = None
else:
if torch.is_tensor(image):
feature_extractor_input = self.image_processor.postprocess(image, output_type="pil")
else:
feature_extractor_input = self.image_processor.numpy_to_pil(image)
safety_checker_input = self.feature_extractor(feature_extractor_input, return_tensors="pt").to(device)
image, has_nsfw_concept = self.safety_checker(
images=image, clip_input=safety_checker_input.pixel_values.to(dtype)
)
return image, has_nsfw_concept
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.decode_latents
def decode_latents(self, latents):
deprecation_message = "The decode_latents method is deprecated and will be removed in 1.0.0. Please use VaeImageProcessor.postprocess(...) instead"
deprecate("decode_latents", "1.0.0", deprecation_message, standard_warn=False)
latents = 1 / self.vae.config.scaling_factor * latents
image = self.vae.decode(latents, return_dict=False)[0]
image = (image / 2 + 0.5).clamp(0, 1)
# we always cast to float32 as this does not cause significant overhead and is compatible with bfloat16
image = image.cpu().permute(0, 2, 3, 1).float().numpy()
return image
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_image_variation.StableDiffusionImageVariationPipeline.check_inputs
def check_inputs(self, image, height, width, callback_steps):
if (
not isinstance(image, torch.Tensor)
and not isinstance(image, PIL.Image.Image)
and not isinstance(image, list)
):
raise ValueError(
"`image` has to be of type `torch.Tensor` or `PIL.Image.Image` or `List[PIL.Image.Image]` but is"
f" {type(image)}"
)
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_latents
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (
batch_size,
num_channels_latents,
int(height) // self.vae_scale_factor,
int(width) // self.vae_scale_factor,
)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_inpaint.StableDiffusionInpaintPipeline.prepare_mask_latents
def prepare_mask_latents(
self, mask, masked_image, batch_size, height, width, dtype, device, generator, do_classifier_free_guidance
):
# resize the mask to latents shape as we concatenate the mask to the latents
# we do that before converting to dtype to avoid breaking in case we're using cpu_offload
# and half precision
mask = torch.nn.functional.interpolate(
mask, size=(height // self.vae_scale_factor, width // self.vae_scale_factor)
)
mask = mask.to(device=device, dtype=dtype)
masked_image = masked_image.to(device=device, dtype=dtype)
if masked_image.shape[1] == 4:
masked_image_latents = masked_image
else:
masked_image_latents = self._encode_vae_image(masked_image, generator=generator)
# duplicate mask and masked_image_latents for each generation per prompt, using mps friendly method
if mask.shape[0] < batch_size:
if not batch_size % mask.shape[0] == 0:
raise ValueError(
"The passed mask and the required batch size don't match. Masks are supposed to be duplicated to"
f" a total batch size of {batch_size}, but {mask.shape[0]} masks were passed. Make sure the number"
" of masks that you pass is divisible by the total requested batch size."
)
mask = mask.repeat(batch_size // mask.shape[0], 1, 1, 1)
if masked_image_latents.shape[0] < batch_size:
if not batch_size % masked_image_latents.shape[0] == 0:
raise ValueError(
"The passed images and the required batch size don't match. Images are supposed to be duplicated"
f" to a total batch size of {batch_size}, but {masked_image_latents.shape[0]} images were passed."
" Make sure the number of images that you pass is divisible by the total requested batch size."
)
masked_image_latents = masked_image_latents.repeat(batch_size // masked_image_latents.shape[0], 1, 1, 1)
mask = torch.cat([mask] * 2) if do_classifier_free_guidance else mask
masked_image_latents = (
torch.cat([masked_image_latents] * 2) if do_classifier_free_guidance else masked_image_latents
)
# aligning device to prevent device errors when concating it with the latent model input
masked_image_latents = masked_image_latents.to(device=device, dtype=dtype)
return mask, masked_image_latents
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_inpaint.StableDiffusionInpaintPipeline._encode_vae_image
def _encode_vae_image(self, image: torch.Tensor, generator: torch.Generator):
if isinstance(generator, list):
image_latents = [
retrieve_latents(self.vae.encode(image[i : i + 1]), generator=generator[i])
for i in range(image.shape[0])
]
image_latents = torch.cat(image_latents, dim=0)
else:
image_latents = retrieve_latents(self.vae.encode(image), generator=generator)
image_latents = self.vae.config.scaling_factor * image_latents
return image_latents
def _encode_image(self, image, device, num_images_per_prompt, do_classifier_free_guidance):
dtype = next(self.image_encoder.parameters()).dtype
if not isinstance(image, torch.Tensor):
image = self.feature_extractor(images=image, return_tensors="pt").pixel_values
image = image.to(device=device, dtype=dtype)
image_embeddings, negative_prompt_embeds = self.image_encoder(image, return_uncond_vector=True)
# duplicate image embeddings for each generation per prompt, using mps friendly method
bs_embed, seq_len, _ = image_embeddings.shape
image_embeddings = image_embeddings.repeat(1, num_images_per_prompt, 1)
image_embeddings = image_embeddings.view(bs_embed * num_images_per_prompt, seq_len, -1)
if do_classifier_free_guidance:
negative_prompt_embeds = negative_prompt_embeds.repeat(1, image_embeddings.shape[0], 1)
negative_prompt_embeds = negative_prompt_embeds.view(bs_embed * num_images_per_prompt, 1, -1)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
image_embeddings = torch.cat([negative_prompt_embeds, image_embeddings])
return image_embeddings
@torch.no_grad()
def __call__(
self,
example_image: Union[torch.Tensor, PIL.Image.Image],
image: Union[torch.Tensor, PIL.Image.Image],
mask_image: Union[torch.Tensor, PIL.Image.Image],
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 50,
guidance_scale: float = 5.0,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.Tensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.Tensor], None]] = None,
callback_steps: int = 1,
):
r"""
The call function to the pipeline for generation.
Args:
example_image (`torch.Tensor` or `PIL.Image.Image` or `List[PIL.Image.Image]`):
An example image to guide image generation.
image (`torch.Tensor` or `PIL.Image.Image` or `List[PIL.Image.Image]`):
`Image` or tensor representing an image batch to be inpainted (parts of the image are masked out with
`mask_image` and repainted according to `prompt`).
mask_image (`torch.Tensor` or `PIL.Image.Image` or `List[PIL.Image.Image]`):
`Image` or tensor representing an image batch to mask `image`. White pixels in the mask are repainted,
while black pixels are preserved. If `mask_image` is a PIL image, it is converted to a single channel
(luminance) before use. If it's a tensor, it should contain one color channel (L) instead of 3, so the
expected shape would be `(B, H, W, 1)`.
height (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 7.5):
A higher guidance scale value encourages the model to generate images closely linked to the text
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide what to not include in image generation. If not defined, you need to
pass `negative_prompt_embeds` instead. Ignored when not using guidance (`guidance_scale < 1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) from the [DDIM](https://arxiv.org/abs/2010.02502) paper. Only applies
to the [`~schedulers.DDIMScheduler`], and is ignored in other schedulers.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
generation deterministic.
latents (`torch.Tensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor is generated by sampling using the supplied random `generator`.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that calls every `callback_steps` steps during inference. The function is called with the
following arguments: `callback(step: int, timestep: int, latents: torch.Tensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function is called. If not specified, the callback is called at
every step.
Example:
```py
>>> import PIL
>>> import requests
>>> import torch
>>> from io import BytesIO
>>> from diffusers import PaintByExamplePipeline
>>> def download_image(url):
... response = requests.get(url)
... return PIL.Image.open(BytesIO(response.content)).convert("RGB")
>>> img_url = (
... "https://raw.githubusercontent.com/Fantasy-Studio/Paint-by-Example/main/examples/image/example_1.png"
... )
>>> mask_url = (
... "https://raw.githubusercontent.com/Fantasy-Studio/Paint-by-Example/main/examples/mask/example_1.png"
... )
>>> example_url = "https://raw.githubusercontent.com/Fantasy-Studio/Paint-by-Example/main/examples/reference/example_1.jpg"
>>> init_image = download_image(img_url).resize((512, 512))
>>> mask_image = download_image(mask_url).resize((512, 512))
>>> example_image = download_image(example_url).resize((512, 512))
>>> pipe = PaintByExamplePipeline.from_pretrained(
... "Fantasy-Studio/Paint-by-Example",
... torch_dtype=torch.float16,
... )
>>> pipe = pipe.to("cuda")
>>> image = pipe(image=init_image, mask_image=mask_image, example_image=example_image).images[0]
>>> image
```
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] is returned,
otherwise a `tuple` is returned where the first element is a list with the generated images and the
second element is a list of `bool`s indicating whether the corresponding generated image contains
"not-safe-for-work" (nsfw) content.
"""
# 1. Define call parameters
if isinstance(image, PIL.Image.Image):
batch_size = 1
elif isinstance(image, list):
batch_size = len(image)
else:
batch_size = image.shape[0]
device = self._execution_device
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 2. Preprocess mask and image
mask, masked_image = prepare_mask_and_masked_image(image, mask_image)
height, width = masked_image.shape[-2:]
# 3. Check inputs
self.check_inputs(example_image, height, width, callback_steps)
# 4. Encode input image
image_embeddings = self._encode_image(
example_image, device, num_images_per_prompt, do_classifier_free_guidance
)
# 5. set timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# 6. Prepare latent variables
num_channels_latents = self.vae.config.latent_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
image_embeddings.dtype,
device,
generator,
latents,
)
# 7. Prepare mask latent variables
mask, masked_image_latents = self.prepare_mask_latents(
mask,
masked_image,
batch_size * num_images_per_prompt,
height,
width,
image_embeddings.dtype,
device,
generator,
do_classifier_free_guidance,
)
# 8. Check that sizes of mask, masked image and latents match
num_channels_mask = mask.shape[1]
num_channels_masked_image = masked_image_latents.shape[1]
if num_channels_latents + num_channels_mask + num_channels_masked_image != self.unet.config.in_channels:
raise ValueError(
f"Incorrect configuration settings! The config of `pipeline.unet`: {self.unet.config} expects"
f" {self.unet.config.in_channels} but received `num_channels_latents`: {num_channels_latents} +"
f" `num_channels_mask`: {num_channels_mask} + `num_channels_masked_image`: {num_channels_masked_image}"
f" = {num_channels_latents+num_channels_masked_image+num_channels_mask}. Please verify the config of"
" `pipeline.unet` or your `mask_image` or `image` input."
)
# 9. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 10. Denoising loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
# concat latents, mask, masked_image_latents in the channel dimension
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
latent_model_input = torch.cat([latent_model_input, masked_image_latents, mask], dim=1)
# predict the noise residual
noise_pred = self.unet(latent_model_input, t, encoder_hidden_states=image_embeddings).sample
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs).prev_sample
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if XLA_AVAILABLE:
xm.mark_step()
self.maybe_free_model_hooks()
if not output_type == "latent":
image = self.vae.decode(latents / self.vae.config.scaling_factor, return_dict=False)[0]
image, has_nsfw_concept = self.run_safety_checker(image, device, image_embeddings.dtype)
else:
image = latents
has_nsfw_concept = None
if has_nsfw_concept is None:
do_denormalize = [True] * image.shape[0]
else:
do_denormalize = [not has_nsfw for has_nsfw in has_nsfw_concept]
image = self.image_processor.postprocess(image, output_type=output_type, do_denormalize=do_denormalize)
if not return_dict:
return (image, has_nsfw_concept)
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
| diffusers/src/diffusers/pipelines/paint_by_example/pipeline_paint_by_example.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/paint_by_example/pipeline_paint_by_example.py",
"repo_id": "diffusers",
"token_count": 13097
} |
# Copyright 2024 Open AI and The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from dataclasses import dataclass
from typing import Tuple
import numpy as np
import torch
@dataclass
class DifferentiableProjectiveCamera:
"""
Implements a batch, differentiable, standard pinhole camera
"""
origin: torch.Tensor # [batch_size x 3]
x: torch.Tensor # [batch_size x 3]
y: torch.Tensor # [batch_size x 3]
z: torch.Tensor # [batch_size x 3]
width: int
height: int
x_fov: float
y_fov: float
shape: Tuple[int]
def __post_init__(self):
assert self.x.shape[0] == self.y.shape[0] == self.z.shape[0] == self.origin.shape[0]
assert self.x.shape[1] == self.y.shape[1] == self.z.shape[1] == self.origin.shape[1] == 3
assert len(self.x.shape) == len(self.y.shape) == len(self.z.shape) == len(self.origin.shape) == 2
def resolution(self):
return torch.from_numpy(np.array([self.width, self.height], dtype=np.float32))
def fov(self):
return torch.from_numpy(np.array([self.x_fov, self.y_fov], dtype=np.float32))
def get_image_coords(self) -> torch.Tensor:
"""
:return: coords of shape (width * height, 2)
"""
pixel_indices = torch.arange(self.height * self.width)
coords = torch.stack(
[
pixel_indices % self.width,
torch.div(pixel_indices, self.width, rounding_mode="trunc"),
],
axis=1,
)
return coords
@property
def camera_rays(self):
batch_size, *inner_shape = self.shape
inner_batch_size = int(np.prod(inner_shape))
coords = self.get_image_coords()
coords = torch.broadcast_to(coords.unsqueeze(0), [batch_size * inner_batch_size, *coords.shape])
rays = self.get_camera_rays(coords)
rays = rays.view(batch_size, inner_batch_size * self.height * self.width, 2, 3)
return rays
def get_camera_rays(self, coords: torch.Tensor) -> torch.Tensor:
batch_size, *shape, n_coords = coords.shape
assert n_coords == 2
assert batch_size == self.origin.shape[0]
flat = coords.view(batch_size, -1, 2)
res = self.resolution()
fov = self.fov()
fracs = (flat.float() / (res - 1)) * 2 - 1
fracs = fracs * torch.tan(fov / 2)
fracs = fracs.view(batch_size, -1, 2)
directions = (
self.z.view(batch_size, 1, 3)
+ self.x.view(batch_size, 1, 3) * fracs[:, :, :1]
+ self.y.view(batch_size, 1, 3) * fracs[:, :, 1:]
)
directions = directions / directions.norm(dim=-1, keepdim=True)
rays = torch.stack(
[
torch.broadcast_to(self.origin.view(batch_size, 1, 3), [batch_size, directions.shape[1], 3]),
directions,
],
dim=2,
)
return rays.view(batch_size, *shape, 2, 3)
def resize_image(self, width: int, height: int) -> "DifferentiableProjectiveCamera":
"""
Creates a new camera for the resized view assuming the aspect ratio does not change.
"""
assert width * self.height == height * self.width, "The aspect ratio should not change."
return DifferentiableProjectiveCamera(
origin=self.origin,
x=self.x,
y=self.y,
z=self.z,
width=width,
height=height,
x_fov=self.x_fov,
y_fov=self.y_fov,
)
def create_pan_cameras(size: int) -> DifferentiableProjectiveCamera:
origins = []
xs = []
ys = []
zs = []
for theta in np.linspace(0, 2 * np.pi, num=20):
z = np.array([np.sin(theta), np.cos(theta), -0.5])
z /= np.sqrt(np.sum(z**2))
origin = -z * 4
x = np.array([np.cos(theta), -np.sin(theta), 0.0])
y = np.cross(z, x)
origins.append(origin)
xs.append(x)
ys.append(y)
zs.append(z)
return DifferentiableProjectiveCamera(
origin=torch.from_numpy(np.stack(origins, axis=0)).float(),
x=torch.from_numpy(np.stack(xs, axis=0)).float(),
y=torch.from_numpy(np.stack(ys, axis=0)).float(),
z=torch.from_numpy(np.stack(zs, axis=0)).float(),
width=size,
height=size,
x_fov=0.7,
y_fov=0.7,
shape=(1, len(xs)),
)
| diffusers/src/diffusers/pipelines/shap_e/camera.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/shap_e/camera.py",
"repo_id": "diffusers",
"token_count": 2274
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import warnings
from functools import partial
from typing import Dict, List, Optional, Union
import jax
import jax.numpy as jnp
import numpy as np
from flax.core.frozen_dict import FrozenDict
from flax.jax_utils import unreplicate
from flax.training.common_utils import shard
from PIL import Image
from transformers import CLIPImageProcessor, CLIPTokenizer, FlaxCLIPTextModel
from ...models import FlaxAutoencoderKL, FlaxUNet2DConditionModel
from ...schedulers import (
FlaxDDIMScheduler,
FlaxDPMSolverMultistepScheduler,
FlaxLMSDiscreteScheduler,
FlaxPNDMScheduler,
)
from ...utils import PIL_INTERPOLATION, logging, replace_example_docstring
from ..pipeline_flax_utils import FlaxDiffusionPipeline
from .pipeline_output import FlaxStableDiffusionPipelineOutput
from .safety_checker_flax import FlaxStableDiffusionSafetyChecker
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
# Set to True to use python for loop instead of jax.fori_loop for easier debugging
DEBUG = False
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import jax
>>> import numpy as np
>>> import jax.numpy as jnp
>>> from flax.jax_utils import replicate
>>> from flax.training.common_utils import shard
>>> import requests
>>> from io import BytesIO
>>> from PIL import Image
>>> from diffusers import FlaxStableDiffusionImg2ImgPipeline
>>> def create_key(seed=0):
... return jax.random.PRNGKey(seed)
>>> rng = create_key(0)
>>> url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
>>> response = requests.get(url)
>>> init_img = Image.open(BytesIO(response.content)).convert("RGB")
>>> init_img = init_img.resize((768, 512))
>>> prompts = "A fantasy landscape, trending on artstation"
>>> pipeline, params = FlaxStableDiffusionImg2ImgPipeline.from_pretrained(
... "CompVis/stable-diffusion-v1-4",
... revision="flax",
... dtype=jnp.bfloat16,
... )
>>> num_samples = jax.device_count()
>>> rng = jax.random.split(rng, jax.device_count())
>>> prompt_ids, processed_image = pipeline.prepare_inputs(
... prompt=[prompts] * num_samples, image=[init_img] * num_samples
... )
>>> p_params = replicate(params)
>>> prompt_ids = shard(prompt_ids)
>>> processed_image = shard(processed_image)
>>> output = pipeline(
... prompt_ids=prompt_ids,
... image=processed_image,
... params=p_params,
... prng_seed=rng,
... strength=0.75,
... num_inference_steps=50,
... jit=True,
... height=512,
... width=768,
... ).images
>>> output_images = pipeline.numpy_to_pil(np.asarray(output.reshape((num_samples,) + output.shape[-3:])))
```
"""
class FlaxStableDiffusionImg2ImgPipeline(FlaxDiffusionPipeline):
r"""
Flax-based pipeline for text-guided image-to-image generation using Stable Diffusion.
This model inherits from [`FlaxDiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
Args:
vae ([`FlaxAutoencoderKL`]):
Variational Auto-Encoder (VAE) model to encode and decode images to and from latent representations.
text_encoder ([`~transformers.FlaxCLIPTextModel`]):
Frozen text-encoder ([clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14)).
tokenizer ([`~transformers.CLIPTokenizer`]):
A `CLIPTokenizer` to tokenize text.
unet ([`FlaxUNet2DConditionModel`]):
A `FlaxUNet2DConditionModel` to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Can be one of
[`FlaxDDIMScheduler`], [`FlaxLMSDiscreteScheduler`], [`FlaxPNDMScheduler`], or
[`FlaxDPMSolverMultistepScheduler`].
safety_checker ([`FlaxStableDiffusionSafetyChecker`]):
Classification module that estimates whether generated images could be considered offensive or harmful.
Please refer to the [model card](https://huggingface.co/stable-diffusion-v1-5/stable-diffusion-v1-5) for
more details about a model's potential harms.
feature_extractor ([`~transformers.CLIPImageProcessor`]):
A `CLIPImageProcessor` to extract features from generated images; used as inputs to the `safety_checker`.
"""
def __init__(
self,
vae: FlaxAutoencoderKL,
text_encoder: FlaxCLIPTextModel,
tokenizer: CLIPTokenizer,
unet: FlaxUNet2DConditionModel,
scheduler: Union[
FlaxDDIMScheduler, FlaxPNDMScheduler, FlaxLMSDiscreteScheduler, FlaxDPMSolverMultistepScheduler
],
safety_checker: FlaxStableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
dtype: jnp.dtype = jnp.float32,
):
super().__init__()
self.dtype = dtype
if safety_checker is None:
logger.warning(
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
)
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1) if getattr(self, "vae", None) else 8
def prepare_inputs(self, prompt: Union[str, List[str]], image: Union[Image.Image, List[Image.Image]]):
if not isinstance(prompt, (str, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if not isinstance(image, (Image.Image, list)):
raise ValueError(f"image has to be of type `PIL.Image.Image` or list but is {type(image)}")
if isinstance(image, Image.Image):
image = [image]
processed_images = jnp.concatenate([preprocess(img, jnp.float32) for img in image])
text_input = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="np",
)
return text_input.input_ids, processed_images
def _get_has_nsfw_concepts(self, features, params):
has_nsfw_concepts = self.safety_checker(features, params)
return has_nsfw_concepts
def _run_safety_checker(self, images, safety_model_params, jit=False):
# safety_model_params should already be replicated when jit is True
pil_images = [Image.fromarray(image) for image in images]
features = self.feature_extractor(pil_images, return_tensors="np").pixel_values
if jit:
features = shard(features)
has_nsfw_concepts = _p_get_has_nsfw_concepts(self, features, safety_model_params)
has_nsfw_concepts = unshard(has_nsfw_concepts)
safety_model_params = unreplicate(safety_model_params)
else:
has_nsfw_concepts = self._get_has_nsfw_concepts(features, safety_model_params)
images_was_copied = False
for idx, has_nsfw_concept in enumerate(has_nsfw_concepts):
if has_nsfw_concept:
if not images_was_copied:
images_was_copied = True
images = images.copy()
images[idx] = np.zeros(images[idx].shape, dtype=np.uint8) # black image
if any(has_nsfw_concepts):
warnings.warn(
"Potential NSFW content was detected in one or more images. A black image will be returned"
" instead. Try again with a different prompt and/or seed."
)
return images, has_nsfw_concepts
def get_timestep_start(self, num_inference_steps, strength):
# get the original timestep using init_timestep
init_timestep = min(int(num_inference_steps * strength), num_inference_steps)
t_start = max(num_inference_steps - init_timestep, 0)
return t_start
def _generate(
self,
prompt_ids: jnp.ndarray,
image: jnp.ndarray,
params: Union[Dict, FrozenDict],
prng_seed: jax.Array,
start_timestep: int,
num_inference_steps: int,
height: int,
width: int,
guidance_scale: float,
noise: Optional[jnp.ndarray] = None,
neg_prompt_ids: Optional[jnp.ndarray] = None,
):
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
# get prompt text embeddings
prompt_embeds = self.text_encoder(prompt_ids, params=params["text_encoder"])[0]
# TODO: currently it is assumed `do_classifier_free_guidance = guidance_scale > 1.0`
# implement this conditional `do_classifier_free_guidance = guidance_scale > 1.0`
batch_size = prompt_ids.shape[0]
max_length = prompt_ids.shape[-1]
if neg_prompt_ids is None:
uncond_input = self.tokenizer(
[""] * batch_size, padding="max_length", max_length=max_length, return_tensors="np"
).input_ids
else:
uncond_input = neg_prompt_ids
negative_prompt_embeds = self.text_encoder(uncond_input, params=params["text_encoder"])[0]
context = jnp.concatenate([negative_prompt_embeds, prompt_embeds])
latents_shape = (
batch_size,
self.unet.config.in_channels,
height // self.vae_scale_factor,
width // self.vae_scale_factor,
)
if noise is None:
noise = jax.random.normal(prng_seed, shape=latents_shape, dtype=jnp.float32)
else:
if noise.shape != latents_shape:
raise ValueError(f"Unexpected latents shape, got {noise.shape}, expected {latents_shape}")
# Create init_latents
init_latent_dist = self.vae.apply({"params": params["vae"]}, image, method=self.vae.encode).latent_dist
init_latents = init_latent_dist.sample(key=prng_seed).transpose((0, 3, 1, 2))
init_latents = self.vae.config.scaling_factor * init_latents
def loop_body(step, args):
latents, scheduler_state = args
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
latents_input = jnp.concatenate([latents] * 2)
t = jnp.array(scheduler_state.timesteps, dtype=jnp.int32)[step]
timestep = jnp.broadcast_to(t, latents_input.shape[0])
latents_input = self.scheduler.scale_model_input(scheduler_state, latents_input, t)
# predict the noise residual
noise_pred = self.unet.apply(
{"params": params["unet"]},
jnp.array(latents_input),
jnp.array(timestep, dtype=jnp.int32),
encoder_hidden_states=context,
).sample
# perform guidance
noise_pred_uncond, noise_prediction_text = jnp.split(noise_pred, 2, axis=0)
noise_pred = noise_pred_uncond + guidance_scale * (noise_prediction_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents, scheduler_state = self.scheduler.step(scheduler_state, noise_pred, t, latents).to_tuple()
return latents, scheduler_state
scheduler_state = self.scheduler.set_timesteps(
params["scheduler"], num_inference_steps=num_inference_steps, shape=latents_shape
)
latent_timestep = scheduler_state.timesteps[start_timestep : start_timestep + 1].repeat(batch_size)
latents = self.scheduler.add_noise(params["scheduler"], init_latents, noise, latent_timestep)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * params["scheduler"].init_noise_sigma
if DEBUG:
# run with python for loop
for i in range(start_timestep, num_inference_steps):
latents, scheduler_state = loop_body(i, (latents, scheduler_state))
else:
latents, _ = jax.lax.fori_loop(start_timestep, num_inference_steps, loop_body, (latents, scheduler_state))
# scale and decode the image latents with vae
latents = 1 / self.vae.config.scaling_factor * latents
image = self.vae.apply({"params": params["vae"]}, latents, method=self.vae.decode).sample
image = (image / 2 + 0.5).clip(0, 1).transpose(0, 2, 3, 1)
return image
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt_ids: jnp.ndarray,
image: jnp.ndarray,
params: Union[Dict, FrozenDict],
prng_seed: jax.Array,
strength: float = 0.8,
num_inference_steps: int = 50,
height: Optional[int] = None,
width: Optional[int] = None,
guidance_scale: Union[float, jnp.ndarray] = 7.5,
noise: jnp.ndarray = None,
neg_prompt_ids: jnp.ndarray = None,
return_dict: bool = True,
jit: bool = False,
):
r"""
The call function to the pipeline for generation.
Args:
prompt_ids (`jnp.ndarray`):
The prompt or prompts to guide image generation.
image (`jnp.ndarray`):
Array representing an image batch to be used as the starting point.
params (`Dict` or `FrozenDict`):
Dictionary containing the model parameters/weights.
prng_seed (`jax.Array` or `jax.Array`):
Array containing random number generator key.
strength (`float`, *optional*, defaults to 0.8):
Indicates extent to transform the reference `image`. Must be between 0 and 1. `image` is used as a
starting point and more noise is added the higher the `strength`. The number of denoising steps depends
on the amount of noise initially added. When `strength` is 1, added noise is maximum and the denoising
process runs for the full number of iterations specified in `num_inference_steps`. A value of 1
essentially ignores `image`.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference. This parameter is modulated by `strength`.
height (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The width in pixels of the generated image.
guidance_scale (`float`, *optional*, defaults to 7.5):
A higher guidance scale value encourages the model to generate images closely linked to the text
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
noise (`jnp.ndarray`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. The array is generated by
sampling using the supplied random `generator`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.FlaxStableDiffusionPipelineOutput`] instead of
a plain tuple.
jit (`bool`, defaults to `False`):
Whether to run `pmap` versions of the generation and safety scoring functions.
<Tip warning={true}>
This argument exists because `__call__` is not yet end-to-end pmap-able. It will be removed in a
future release.
</Tip>
Examples:
Returns:
[`~pipelines.stable_diffusion.FlaxStableDiffusionPipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.stable_diffusion.FlaxStableDiffusionPipelineOutput`] is
returned, otherwise a `tuple` is returned where the first element is a list with the generated images
and the second element is a list of `bool`s indicating whether the corresponding generated image
contains "not-safe-for-work" (nsfw) content.
"""
# 0. Default height and width to unet
height = height or self.unet.config.sample_size * self.vae_scale_factor
width = width or self.unet.config.sample_size * self.vae_scale_factor
if isinstance(guidance_scale, float):
# Convert to a tensor so each device gets a copy. Follow the prompt_ids for
# shape information, as they may be sharded (when `jit` is `True`), or not.
guidance_scale = jnp.array([guidance_scale] * prompt_ids.shape[0])
if len(prompt_ids.shape) > 2:
# Assume sharded
guidance_scale = guidance_scale[:, None]
start_timestep = self.get_timestep_start(num_inference_steps, strength)
if jit:
images = _p_generate(
self,
prompt_ids,
image,
params,
prng_seed,
start_timestep,
num_inference_steps,
height,
width,
guidance_scale,
noise,
neg_prompt_ids,
)
else:
images = self._generate(
prompt_ids,
image,
params,
prng_seed,
start_timestep,
num_inference_steps,
height,
width,
guidance_scale,
noise,
neg_prompt_ids,
)
if self.safety_checker is not None:
safety_params = params["safety_checker"]
images_uint8_casted = (images * 255).round().astype("uint8")
num_devices, batch_size = images.shape[:2]
images_uint8_casted = np.asarray(images_uint8_casted).reshape(num_devices * batch_size, height, width, 3)
images_uint8_casted, has_nsfw_concept = self._run_safety_checker(images_uint8_casted, safety_params, jit)
images = np.asarray(images)
# block images
if any(has_nsfw_concept):
for i, is_nsfw in enumerate(has_nsfw_concept):
if is_nsfw:
images[i] = np.asarray(images_uint8_casted[i])
images = images.reshape(num_devices, batch_size, height, width, 3)
else:
images = np.asarray(images)
has_nsfw_concept = False
if not return_dict:
return (images, has_nsfw_concept)
return FlaxStableDiffusionPipelineOutput(images=images, nsfw_content_detected=has_nsfw_concept)
# Static argnums are pipe, start_timestep, num_inference_steps, height, width. A change would trigger recompilation.
# Non-static args are (sharded) input tensors mapped over their first dimension (hence, `0`).
@partial(
jax.pmap,
in_axes=(None, 0, 0, 0, 0, None, None, None, None, 0, 0, 0),
static_broadcasted_argnums=(0, 5, 6, 7, 8),
)
def _p_generate(
pipe,
prompt_ids,
image,
params,
prng_seed,
start_timestep,
num_inference_steps,
height,
width,
guidance_scale,
noise,
neg_prompt_ids,
):
return pipe._generate(
prompt_ids,
image,
params,
prng_seed,
start_timestep,
num_inference_steps,
height,
width,
guidance_scale,
noise,
neg_prompt_ids,
)
@partial(jax.pmap, static_broadcasted_argnums=(0,))
def _p_get_has_nsfw_concepts(pipe, features, params):
return pipe._get_has_nsfw_concepts(features, params)
def unshard(x: jnp.ndarray):
# einops.rearrange(x, 'd b ... -> (d b) ...')
num_devices, batch_size = x.shape[:2]
rest = x.shape[2:]
return x.reshape(num_devices * batch_size, *rest)
def preprocess(image, dtype):
w, h = image.size
w, h = (x - x % 32 for x in (w, h)) # resize to integer multiple of 32
image = image.resize((w, h), resample=PIL_INTERPOLATION["lanczos"])
image = jnp.array(image).astype(dtype) / 255.0
image = image[None].transpose(0, 3, 1, 2)
return 2.0 * image - 1.0
| diffusers/src/diffusers/pipelines/stable_diffusion/pipeline_flax_stable_diffusion_img2img.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/stable_diffusion/pipeline_flax_stable_diffusion_img2img.py",
"repo_id": "diffusers",
"token_count": 9920
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
from typing import Any, Callable, Dict, List, Optional, Union
import PIL.Image
import torch
from transformers import CLIPImageProcessor, CLIPTextModel, CLIPTokenizer, CLIPVisionModelWithProjection
from ...image_processor import VaeImageProcessor
from ...loaders import StableDiffusionLoraLoaderMixin, TextualInversionLoaderMixin
from ...models import AutoencoderKL, UNet2DConditionModel
from ...models.embeddings import get_timestep_embedding
from ...models.lora import adjust_lora_scale_text_encoder
from ...schedulers import KarrasDiffusionSchedulers
from ...utils import (
USE_PEFT_BACKEND,
deprecate,
is_torch_xla_available,
logging,
replace_example_docstring,
scale_lora_layers,
unscale_lora_layers,
)
from ...utils.torch_utils import randn_tensor
from ..pipeline_utils import DiffusionPipeline, ImagePipelineOutput, StableDiffusionMixin
from .stable_unclip_image_normalizer import StableUnCLIPImageNormalizer
if is_torch_xla_available():
import torch_xla.core.xla_model as xm
XLA_AVAILABLE = True
else:
XLA_AVAILABLE = False
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import requests
>>> import torch
>>> from PIL import Image
>>> from io import BytesIO
>>> from diffusers import StableUnCLIPImg2ImgPipeline
>>> pipe = StableUnCLIPImg2ImgPipeline.from_pretrained(
... "stabilityai/stable-diffusion-2-1-unclip-small", torch_dtype=torch.float16
... )
>>> pipe = pipe.to("cuda")
>>> url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
>>> response = requests.get(url)
>>> init_image = Image.open(BytesIO(response.content)).convert("RGB")
>>> init_image = init_image.resize((768, 512))
>>> prompt = "A fantasy landscape, trending on artstation"
>>> images = pipe(init_image, prompt).images
>>> images[0].save("fantasy_landscape.png")
```
"""
class StableUnCLIPImg2ImgPipeline(
DiffusionPipeline, StableDiffusionMixin, TextualInversionLoaderMixin, StableDiffusionLoraLoaderMixin
):
"""
Pipeline for text-guided image-to-image generation using stable unCLIP.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
The pipeline also inherits the following loading methods:
- [`~loaders.TextualInversionLoaderMixin.load_textual_inversion`] for loading textual inversion embeddings
- [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] for loading LoRA weights
- [`~loaders.StableDiffusionLoraLoaderMixin.save_lora_weights`] for saving LoRA weights
Args:
feature_extractor ([`CLIPImageProcessor`]):
Feature extractor for image pre-processing before being encoded.
image_encoder ([`CLIPVisionModelWithProjection`]):
CLIP vision model for encoding images.
image_normalizer ([`StableUnCLIPImageNormalizer`]):
Used to normalize the predicted image embeddings before the noise is applied and un-normalize the image
embeddings after the noise has been applied.
image_noising_scheduler ([`KarrasDiffusionSchedulers`]):
Noise schedule for adding noise to the predicted image embeddings. The amount of noise to add is determined
by the `noise_level`.
tokenizer (`~transformers.CLIPTokenizer`):
A [`~transformers.CLIPTokenizer`)].
text_encoder ([`~transformers.CLIPTextModel`]):
Frozen [`~transformers.CLIPTextModel`] text-encoder.
unet ([`UNet2DConditionModel`]):
A [`UNet2DConditionModel`] to denoise the encoded image latents.
scheduler ([`KarrasDiffusionSchedulers`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents.
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) Model to encode and decode images to and from latent representations.
"""
model_cpu_offload_seq = "text_encoder->image_encoder->unet->vae"
_exclude_from_cpu_offload = ["image_normalizer"]
# image encoding components
feature_extractor: CLIPImageProcessor
image_encoder: CLIPVisionModelWithProjection
# image noising components
image_normalizer: StableUnCLIPImageNormalizer
image_noising_scheduler: KarrasDiffusionSchedulers
# regular denoising components
tokenizer: CLIPTokenizer
text_encoder: CLIPTextModel
unet: UNet2DConditionModel
scheduler: KarrasDiffusionSchedulers
vae: AutoencoderKL
def __init__(
self,
# image encoding components
feature_extractor: CLIPImageProcessor,
image_encoder: CLIPVisionModelWithProjection,
# image noising components
image_normalizer: StableUnCLIPImageNormalizer,
image_noising_scheduler: KarrasDiffusionSchedulers,
# regular denoising components
tokenizer: CLIPTokenizer,
text_encoder: CLIPTextModel,
unet: UNet2DConditionModel,
scheduler: KarrasDiffusionSchedulers,
# vae
vae: AutoencoderKL,
):
super().__init__()
self.register_modules(
feature_extractor=feature_extractor,
image_encoder=image_encoder,
image_normalizer=image_normalizer,
image_noising_scheduler=image_noising_scheduler,
tokenizer=tokenizer,
text_encoder=text_encoder,
unet=unet,
scheduler=scheduler,
vae=vae,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1) if getattr(self, "vae", None) else 8
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline._encode_prompt
def _encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
lora_scale: Optional[float] = None,
**kwargs,
):
deprecation_message = "`_encode_prompt()` is deprecated and it will be removed in a future version. Use `encode_prompt()` instead. Also, be aware that the output format changed from a concatenated tensor to a tuple."
deprecate("_encode_prompt()", "1.0.0", deprecation_message, standard_warn=False)
prompt_embeds_tuple = self.encode_prompt(
prompt=prompt,
device=device,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=do_classifier_free_guidance,
negative_prompt=negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
lora_scale=lora_scale,
**kwargs,
)
# concatenate for backwards comp
prompt_embeds = torch.cat([prompt_embeds_tuple[1], prompt_embeds_tuple[0]])
return prompt_embeds
def _encode_image(
self,
image,
device,
batch_size,
num_images_per_prompt,
do_classifier_free_guidance,
noise_level,
generator,
image_embeds,
):
dtype = next(self.image_encoder.parameters()).dtype
if isinstance(image, PIL.Image.Image):
# the image embedding should repeated so it matches the total batch size of the prompt
repeat_by = batch_size
else:
# assume the image input is already properly batched and just needs to be repeated so
# it matches the num_images_per_prompt.
#
# NOTE(will) this is probably missing a few number of side cases. I.e. batched/non-batched
# `image_embeds`. If those happen to be common use cases, let's think harder about
# what the expected dimensions of inputs should be and how we handle the encoding.
repeat_by = num_images_per_prompt
if image_embeds is None:
if not isinstance(image, torch.Tensor):
image = self.feature_extractor(images=image, return_tensors="pt").pixel_values
image = image.to(device=device, dtype=dtype)
image_embeds = self.image_encoder(image).image_embeds
image_embeds = self.noise_image_embeddings(
image_embeds=image_embeds,
noise_level=noise_level,
generator=generator,
)
# duplicate image embeddings for each generation per prompt, using mps friendly method
image_embeds = image_embeds.unsqueeze(1)
bs_embed, seq_len, _ = image_embeds.shape
image_embeds = image_embeds.repeat(1, repeat_by, 1)
image_embeds = image_embeds.view(bs_embed * repeat_by, seq_len, -1)
image_embeds = image_embeds.squeeze(1)
if do_classifier_free_guidance:
negative_prompt_embeds = torch.zeros_like(image_embeds)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
image_embeds = torch.cat([negative_prompt_embeds, image_embeds])
return image_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.encode_prompt
def encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
lora_scale: Optional[float] = None,
clip_skip: Optional[int] = None,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
less than `1`).
prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
lora_scale (`float`, *optional*):
A LoRA scale that will be applied to all LoRA layers of the text encoder if LoRA layers are loaded.
clip_skip (`int`, *optional*):
Number of layers to be skipped from CLIP while computing the prompt embeddings. A value of 1 means that
the output of the pre-final layer will be used for computing the prompt embeddings.
"""
# set lora scale so that monkey patched LoRA
# function of text encoder can correctly access it
if lora_scale is not None and isinstance(self, StableDiffusionLoraLoaderMixin):
self._lora_scale = lora_scale
# dynamically adjust the LoRA scale
if not USE_PEFT_BACKEND:
adjust_lora_scale_text_encoder(self.text_encoder, lora_scale)
else:
scale_lora_layers(self.text_encoder, lora_scale)
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if prompt_embeds is None:
# textual inversion: process multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
prompt = self.maybe_convert_prompt(prompt, self.tokenizer)
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.tokenizer.batch_decode(
untruncated_ids[:, self.tokenizer.model_max_length - 1 : -1]
)
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = text_inputs.attention_mask.to(device)
else:
attention_mask = None
if clip_skip is None:
prompt_embeds = self.text_encoder(text_input_ids.to(device), attention_mask=attention_mask)
prompt_embeds = prompt_embeds[0]
else:
prompt_embeds = self.text_encoder(
text_input_ids.to(device), attention_mask=attention_mask, output_hidden_states=True
)
# Access the `hidden_states` first, that contains a tuple of
# all the hidden states from the encoder layers. Then index into
# the tuple to access the hidden states from the desired layer.
prompt_embeds = prompt_embeds[-1][-(clip_skip + 1)]
# We also need to apply the final LayerNorm here to not mess with the
# representations. The `last_hidden_states` that we typically use for
# obtaining the final prompt representations passes through the LayerNorm
# layer.
prompt_embeds = self.text_encoder.text_model.final_layer_norm(prompt_embeds)
if self.text_encoder is not None:
prompt_embeds_dtype = self.text_encoder.dtype
elif self.unet is not None:
prompt_embeds_dtype = self.unet.dtype
else:
prompt_embeds_dtype = prompt_embeds.dtype
prompt_embeds = prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance and negative_prompt_embeds is None:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif prompt is not None and type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
# textual inversion: process multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
uncond_tokens = self.maybe_convert_prompt(uncond_tokens, self.tokenizer)
max_length = prompt_embeds.shape[1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = uncond_input.attention_mask.to(device)
else:
attention_mask = None
negative_prompt_embeds = self.text_encoder(
uncond_input.input_ids.to(device),
attention_mask=attention_mask,
)
negative_prompt_embeds = negative_prompt_embeds[0]
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
if self.text_encoder is not None:
if isinstance(self, StableDiffusionLoraLoaderMixin) and USE_PEFT_BACKEND:
# Retrieve the original scale by scaling back the LoRA layers
unscale_lora_layers(self.text_encoder, lora_scale)
return prompt_embeds, negative_prompt_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.decode_latents
def decode_latents(self, latents):
deprecation_message = "The decode_latents method is deprecated and will be removed in 1.0.0. Please use VaeImageProcessor.postprocess(...) instead"
deprecate("decode_latents", "1.0.0", deprecation_message, standard_warn=False)
latents = 1 / self.vae.config.scaling_factor * latents
image = self.vae.decode(latents, return_dict=False)[0]
image = (image / 2 + 0.5).clamp(0, 1)
# we always cast to float32 as this does not cause significant overhead and is compatible with bfloat16
image = image.cpu().permute(0, 2, 3, 1).float().numpy()
return image
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def check_inputs(
self,
prompt,
image,
height,
width,
callback_steps,
noise_level,
negative_prompt=None,
prompt_embeds=None,
negative_prompt_embeds=None,
image_embeds=None,
):
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if prompt is not None and prompt_embeds is not None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Please make sure to define only one of the two."
)
if prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
if prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
"Provide either `negative_prompt` or `negative_prompt_embeds`. Cannot leave both `negative_prompt` and `negative_prompt_embeds` undefined."
)
if prompt is not None and negative_prompt is not None:
if type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
if noise_level < 0 or noise_level >= self.image_noising_scheduler.config.num_train_timesteps:
raise ValueError(
f"`noise_level` must be between 0 and {self.image_noising_scheduler.config.num_train_timesteps - 1}, inclusive."
)
if image is not None and image_embeds is not None:
raise ValueError(
"Provide either `image` or `image_embeds`. Please make sure to define only one of the two."
)
if image is None and image_embeds is None:
raise ValueError(
"Provide either `image` or `image_embeds`. Cannot leave both `image` and `image_embeds` undefined."
)
if image is not None:
if (
not isinstance(image, torch.Tensor)
and not isinstance(image, PIL.Image.Image)
and not isinstance(image, list)
):
raise ValueError(
"`image` has to be of type `torch.Tensor` or `PIL.Image.Image` or `List[PIL.Image.Image]` but is"
f" {type(image)}"
)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_latents
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (
batch_size,
num_channels_latents,
int(height) // self.vae_scale_factor,
int(width) // self.vae_scale_factor,
)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_unclip.StableUnCLIPPipeline.noise_image_embeddings
def noise_image_embeddings(
self,
image_embeds: torch.Tensor,
noise_level: int,
noise: Optional[torch.Tensor] = None,
generator: Optional[torch.Generator] = None,
):
"""
Add noise to the image embeddings. The amount of noise is controlled by a `noise_level` input. A higher
`noise_level` increases the variance in the final un-noised images.
The noise is applied in two ways:
1. A noise schedule is applied directly to the embeddings.
2. A vector of sinusoidal time embeddings are appended to the output.
In both cases, the amount of noise is controlled by the same `noise_level`.
The embeddings are normalized before the noise is applied and un-normalized after the noise is applied.
"""
if noise is None:
noise = randn_tensor(
image_embeds.shape, generator=generator, device=image_embeds.device, dtype=image_embeds.dtype
)
noise_level = torch.tensor([noise_level] * image_embeds.shape[0], device=image_embeds.device)
self.image_normalizer.to(image_embeds.device)
image_embeds = self.image_normalizer.scale(image_embeds)
image_embeds = self.image_noising_scheduler.add_noise(image_embeds, timesteps=noise_level, noise=noise)
image_embeds = self.image_normalizer.unscale(image_embeds)
noise_level = get_timestep_embedding(
timesteps=noise_level, embedding_dim=image_embeds.shape[-1], flip_sin_to_cos=True, downscale_freq_shift=0
)
# `get_timestep_embeddings` does not contain any weights and will always return f32 tensors,
# but we might actually be running in fp16. so we need to cast here.
# there might be better ways to encapsulate this.
noise_level = noise_level.to(image_embeds.dtype)
image_embeds = torch.cat((image_embeds, noise_level), 1)
return image_embeds
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
image: Union[torch.Tensor, PIL.Image.Image] = None,
prompt: Union[str, List[str]] = None,
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 20,
guidance_scale: float = 10,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[torch.Generator] = None,
latents: Optional[torch.Tensor] = None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.Tensor], None]] = None,
callback_steps: int = 1,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
noise_level: int = 0,
image_embeds: Optional[torch.Tensor] = None,
clip_skip: Optional[int] = None,
):
r"""
The call function to the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide the image generation. If not defined, either `prompt_embeds` will be
used or prompt is initialized to `""`.
image (`torch.Tensor` or `PIL.Image.Image`):
`Image` or tensor representing an image batch. The image is encoded to its CLIP embedding which the
`unet` is conditioned on. The image is _not_ encoded by the `vae` and then used as the latents in the
denoising process like it is in the standard Stable Diffusion text-guided image variation process.
height (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 20):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 10.0):
A higher guidance scale value encourages the model to generate images closely linked to the text
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide what to not include in image generation. If not defined, you need to
pass `negative_prompt_embeds` instead. Ignored when not using guidance (`guidance_scale < 1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) from the [DDIM](https://arxiv.org/abs/2010.02502) paper. Only applies
to the [`~schedulers.DDIMScheduler`], and is ignored in other schedulers.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
generation deterministic.
latents (`torch.Tensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor is generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs (prompt weighting). If not
provided, text embeddings are generated from the `prompt` input argument.
negative_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs (prompt weighting). If
not provided, `negative_prompt_embeds` are generated from the `negative_prompt` input argument.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.ImagePipelineOutput`] instead of a plain tuple.
callback (`Callable`, *optional*):
A function that calls every `callback_steps` steps during inference. The function is called with the
following arguments: `callback(step: int, timestep: int, latents: torch.Tensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function is called. If not specified, the callback is called at
every step.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the [`AttentionProcessor`] as defined in
[`self.processor`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
noise_level (`int`, *optional*, defaults to `0`):
The amount of noise to add to the image embeddings. A higher `noise_level` increases the variance in
the final un-noised images. See [`StableUnCLIPPipeline.noise_image_embeddings`] for more details.
image_embeds (`torch.Tensor`, *optional*):
Pre-generated CLIP embeddings to condition the `unet` on. These latents are not used in the denoising
process. If you want to provide pre-generated latents, pass them to `__call__` as `latents`.
clip_skip (`int`, *optional*):
Number of layers to be skipped from CLIP while computing the prompt embeddings. A value of 1 means that
the output of the pre-final layer will be used for computing the prompt embeddings.
Examples:
Returns:
[`~pipelines.ImagePipelineOutput`] or `tuple`:
[`~ pipeline_utils.ImagePipelineOutput`] if `return_dict` is True, otherwise a `tuple`. When returning
a tuple, the first element is a list with the generated images.
"""
# 0. Default height and width to unet
height = height or self.unet.config.sample_size * self.vae_scale_factor
width = width or self.unet.config.sample_size * self.vae_scale_factor
if prompt is None and prompt_embeds is None:
prompt = len(image) * [""] if isinstance(image, list) else ""
# 1. Check inputs. Raise error if not correct
self.check_inputs(
prompt=prompt,
image=image,
height=height,
width=width,
callback_steps=callback_steps,
noise_level=noise_level,
negative_prompt=negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
image_embeds=image_embeds,
)
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
batch_size = batch_size * num_images_per_prompt
device = self._execution_device
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 3. Encode input prompt
text_encoder_lora_scale = (
cross_attention_kwargs.get("scale", None) if cross_attention_kwargs is not None else None
)
prompt_embeds, negative_prompt_embeds = self.encode_prompt(
prompt=prompt,
device=device,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=do_classifier_free_guidance,
negative_prompt=negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
lora_scale=text_encoder_lora_scale,
)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
if do_classifier_free_guidance:
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds])
# 4. Encoder input image
noise_level = torch.tensor([noise_level], device=device)
image_embeds = self._encode_image(
image=image,
device=device,
batch_size=batch_size,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=do_classifier_free_guidance,
noise_level=noise_level,
generator=generator,
image_embeds=image_embeds,
)
# 5. Prepare timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# 6. Prepare latent variables
num_channels_latents = self.unet.config.in_channels
if latents is None:
latents = self.prepare_latents(
batch_size=batch_size,
num_channels_latents=num_channels_latents,
height=height,
width=width,
dtype=prompt_embeds.dtype,
device=device,
generator=generator,
latents=latents,
)
# 7. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 8. Denoising loop
for i, t in enumerate(self.progress_bar(timesteps)):
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
# predict the noise residual
noise_pred = self.unet(
latent_model_input,
t,
encoder_hidden_states=prompt_embeds,
class_labels=image_embeds,
cross_attention_kwargs=cross_attention_kwargs,
return_dict=False,
)[0]
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs, return_dict=False)[0]
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if XLA_AVAILABLE:
xm.mark_step()
# 9. Post-processing
if not output_type == "latent":
image = self.vae.decode(latents / self.vae.config.scaling_factor, return_dict=False)[0]
else:
image = latents
image = self.image_processor.postprocess(image, output_type=output_type)
# Offload all models
self.maybe_free_model_hooks()
if not return_dict:
return (image,)
return ImagePipelineOutput(images=image)
| diffusers/src/diffusers/pipelines/stable_diffusion/pipeline_stable_unclip_img2img.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/stable_diffusion/pipeline_stable_unclip_img2img.py",
"repo_id": "diffusers",
"token_count": 17505
} |
from typing import TYPE_CHECKING
from ...utils import (
DIFFUSERS_SLOW_IMPORT,
OptionalDependencyNotAvailable,
_LazyModule,
get_objects_from_module,
is_k_diffusion_available,
is_k_diffusion_version,
is_torch_available,
is_transformers_available,
)
_dummy_objects = {}
_import_structure = {}
try:
if not (
is_transformers_available()
and is_torch_available()
and is_k_diffusion_available()
and is_k_diffusion_version(">=", "0.0.12")
):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_torch_and_transformers_and_k_diffusion_objects # noqa F403
_dummy_objects.update(get_objects_from_module(dummy_torch_and_transformers_and_k_diffusion_objects))
else:
_import_structure["pipeline_stable_diffusion_k_diffusion"] = ["StableDiffusionKDiffusionPipeline"]
_import_structure["pipeline_stable_diffusion_xl_k_diffusion"] = ["StableDiffusionXLKDiffusionPipeline"]
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
try:
if not (
is_transformers_available()
and is_torch_available()
and is_k_diffusion_available()
and is_k_diffusion_version(">=", "0.0.12")
):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_torch_and_transformers_and_k_diffusion_objects import *
else:
from .pipeline_stable_diffusion_k_diffusion import StableDiffusionKDiffusionPipeline
from .pipeline_stable_diffusion_xl_k_diffusion import StableDiffusionXLKDiffusionPipeline
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
for name, value in _dummy_objects.items():
setattr(sys.modules[__name__], name, value)
| diffusers/src/diffusers/pipelines/stable_diffusion_k_diffusion/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/stable_diffusion_k_diffusion/__init__.py",
"repo_id": "diffusers",
"token_count": 812
} |
# coding=utf-8
# Copyright 2025 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import contextlib
import os
import tempfile
from typing import TYPE_CHECKING, Dict
from huggingface_hub import DDUFEntry
from tqdm import tqdm
from ..utils import is_safetensors_available, is_transformers_available, is_transformers_version
if TYPE_CHECKING:
from transformers import PreTrainedModel, PreTrainedTokenizer
if is_transformers_available():
from transformers import PreTrainedModel, PreTrainedTokenizer
if is_safetensors_available():
import safetensors.torch
def _load_tokenizer_from_dduf(
cls: "PreTrainedTokenizer", name: str, dduf_entries: Dict[str, DDUFEntry], **kwargs
) -> "PreTrainedTokenizer":
"""
Load a tokenizer from a DDUF archive.
In practice, `transformers` do not provide a way to load a tokenizer from a DDUF archive. This function is a
workaround by extracting the tokenizer files from the DDUF archive and loading the tokenizer from the extracted
files. There is an extra cost of extracting the files, but of limited impact as the tokenizer files are usually
small-ish.
"""
with tempfile.TemporaryDirectory() as tmp_dir:
for entry_name, entry in dduf_entries.items():
if entry_name.startswith(name + "/"):
tmp_entry_path = os.path.join(tmp_dir, *entry_name.split("/"))
# need to create intermediary directory if they don't exist
os.makedirs(os.path.dirname(tmp_entry_path), exist_ok=True)
with open(tmp_entry_path, "wb") as f:
with entry.as_mmap() as mm:
f.write(mm)
return cls.from_pretrained(os.path.dirname(tmp_entry_path), **kwargs)
def _load_transformers_model_from_dduf(
cls: "PreTrainedModel", name: str, dduf_entries: Dict[str, DDUFEntry], **kwargs
) -> "PreTrainedModel":
"""
Load a transformers model from a DDUF archive.
In practice, `transformers` do not provide a way to load a model from a DDUF archive. This function is a workaround
by instantiating a model from the config file and loading the weights from the DDUF archive directly.
"""
config_file = dduf_entries.get(f"{name}/config.json")
if config_file is None:
raise EnvironmentError(
f"Could not find a config.json file for component {name} in DDUF file (contains {dduf_entries.keys()})."
)
generation_config = dduf_entries.get(f"{name}/generation_config.json", None)
weight_files = [
entry
for entry_name, entry in dduf_entries.items()
if entry_name.startswith(f"{name}/") and entry_name.endswith(".safetensors")
]
if not weight_files:
raise EnvironmentError(
f"Could not find any weight file for component {name} in DDUF file (contains {dduf_entries.keys()})."
)
if not is_safetensors_available():
raise EnvironmentError(
"Safetensors is not available, cannot load model from DDUF. Please `pip install safetensors`."
)
if is_transformers_version("<", "4.47.0"):
raise ImportError(
"You need to install `transformers>4.47.0` in order to load a transformers model from a DDUF file. "
"You can install it with: `pip install --upgrade transformers`"
)
with tempfile.TemporaryDirectory() as tmp_dir:
from transformers import AutoConfig, GenerationConfig
tmp_config_file = os.path.join(tmp_dir, "config.json")
with open(tmp_config_file, "w") as f:
f.write(config_file.read_text())
config = AutoConfig.from_pretrained(tmp_config_file)
if generation_config is not None:
tmp_generation_config_file = os.path.join(tmp_dir, "generation_config.json")
with open(tmp_generation_config_file, "w") as f:
f.write(generation_config.read_text())
generation_config = GenerationConfig.from_pretrained(tmp_generation_config_file)
state_dict = {}
with contextlib.ExitStack() as stack:
for entry in tqdm(weight_files, desc="Loading state_dict"): # Loop over safetensors files
# Memory-map the safetensors file
mmap = stack.enter_context(entry.as_mmap())
# Load tensors from the memory-mapped file
tensors = safetensors.torch.load(mmap)
# Update the state dictionary with tensors
state_dict.update(tensors)
return cls.from_pretrained(
pretrained_model_name_or_path=None,
config=config,
generation_config=generation_config,
state_dict=state_dict,
**kwargs,
)
| diffusers/src/diffusers/pipelines/transformers_loading_utils.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/transformers_loading_utils.py",
"repo_id": "diffusers",
"token_count": 2082
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from dataclasses import dataclass
from math import ceil
from typing import Callable, Dict, List, Optional, Union
import numpy as np
import torch
from transformers import CLIPTextModel, CLIPTokenizer
from ...loaders import StableDiffusionLoraLoaderMixin
from ...schedulers import DDPMWuerstchenScheduler
from ...utils import BaseOutput, deprecate, is_torch_xla_available, logging, replace_example_docstring
from ...utils.torch_utils import randn_tensor
from ..pipeline_utils import DiffusionPipeline
from .modeling_wuerstchen_prior import WuerstchenPrior
if is_torch_xla_available():
import torch_xla.core.xla_model as xm
XLA_AVAILABLE = True
else:
XLA_AVAILABLE = False
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
DEFAULT_STAGE_C_TIMESTEPS = list(np.linspace(1.0, 2 / 3, 20)) + list(np.linspace(2 / 3, 0.0, 11))[1:]
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import torch
>>> from diffusers import WuerstchenPriorPipeline
>>> prior_pipe = WuerstchenPriorPipeline.from_pretrained(
... "warp-ai/wuerstchen-prior", torch_dtype=torch.float16
... ).to("cuda")
>>> prompt = "an image of a shiba inu, donning a spacesuit and helmet"
>>> prior_output = pipe(prompt)
```
"""
@dataclass
class WuerstchenPriorPipelineOutput(BaseOutput):
"""
Output class for WuerstchenPriorPipeline.
Args:
image_embeddings (`torch.Tensor` or `np.ndarray`)
Prior image embeddings for text prompt
"""
image_embeddings: Union[torch.Tensor, np.ndarray]
class WuerstchenPriorPipeline(DiffusionPipeline, StableDiffusionLoraLoaderMixin):
"""
Pipeline for generating image prior for Wuerstchen.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
The pipeline also inherits the following loading methods:
- [`~loaders.StableDiffusionLoraLoaderMixin.load_lora_weights`] for loading LoRA weights
- [`~loaders.StableDiffusionLoraLoaderMixin.save_lora_weights`] for saving LoRA weights
Args:
prior ([`Prior`]):
The canonical unCLIP prior to approximate the image embedding from the text embedding.
text_encoder ([`CLIPTextModelWithProjection`]):
Frozen text-encoder.
tokenizer (`CLIPTokenizer`):
Tokenizer of class
[CLIPTokenizer](https://huggingface.co/docs/transformers/v4.21.0/en/model_doc/clip#transformers.CLIPTokenizer).
scheduler ([`DDPMWuerstchenScheduler`]):
A scheduler to be used in combination with `prior` to generate image embedding.
latent_mean ('float', *optional*, defaults to 42.0):
Mean value for latent diffusers.
latent_std ('float', *optional*, defaults to 1.0):
Standard value for latent diffusers.
resolution_multiple ('float', *optional*, defaults to 42.67):
Default resolution for multiple images generated.
"""
unet_name = "prior"
text_encoder_name = "text_encoder"
model_cpu_offload_seq = "text_encoder->prior"
_callback_tensor_inputs = ["latents", "text_encoder_hidden_states", "negative_prompt_embeds"]
_lora_loadable_modules = ["prior", "text_encoder"]
def __init__(
self,
tokenizer: CLIPTokenizer,
text_encoder: CLIPTextModel,
prior: WuerstchenPrior,
scheduler: DDPMWuerstchenScheduler,
latent_mean: float = 42.0,
latent_std: float = 1.0,
resolution_multiple: float = 42.67,
) -> None:
super().__init__()
self.register_modules(
tokenizer=tokenizer,
text_encoder=text_encoder,
prior=prior,
scheduler=scheduler,
)
self.register_to_config(
latent_mean=latent_mean, latent_std=latent_std, resolution_multiple=resolution_multiple
)
# Copied from diffusers.pipelines.unclip.pipeline_unclip.UnCLIPPipeline.prepare_latents
def prepare_latents(self, shape, dtype, device, generator, latents, scheduler):
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
if latents.shape != shape:
raise ValueError(f"Unexpected latents shape, got {latents.shape}, expected {shape}")
latents = latents.to(device)
latents = latents * scheduler.init_noise_sigma
return latents
def encode_prompt(
self,
device,
num_images_per_prompt,
do_classifier_free_guidance,
prompt=None,
negative_prompt=None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
):
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if prompt_embeds is None:
# get prompt text embeddings
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
attention_mask = text_inputs.attention_mask
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.tokenizer.batch_decode(
untruncated_ids[:, self.tokenizer.model_max_length - 1 : -1]
)
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
text_input_ids = text_input_ids[:, : self.tokenizer.model_max_length]
attention_mask = attention_mask[:, : self.tokenizer.model_max_length]
text_encoder_output = self.text_encoder(
text_input_ids.to(device), attention_mask=attention_mask.to(device)
)
prompt_embeds = text_encoder_output.last_hidden_state
prompt_embeds = prompt_embeds.to(dtype=self.text_encoder.dtype, device=device)
prompt_embeds = prompt_embeds.repeat_interleave(num_images_per_prompt, dim=0)
if negative_prompt_embeds is None and do_classifier_free_guidance:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
negative_prompt_embeds_text_encoder_output = self.text_encoder(
uncond_input.input_ids.to(device), attention_mask=uncond_input.attention_mask.to(device)
)
negative_prompt_embeds = negative_prompt_embeds_text_encoder_output.last_hidden_state
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=self.text_encoder.dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
# done duplicates
return prompt_embeds, negative_prompt_embeds
def check_inputs(
self,
prompt,
negative_prompt,
num_inference_steps,
do_classifier_free_guidance,
prompt_embeds=None,
negative_prompt_embeds=None,
):
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
if not isinstance(num_inference_steps, int):
raise TypeError(
f"'num_inference_steps' must be of type 'int', but got {type(num_inference_steps)}\
In Case you want to provide explicit timesteps, please use the 'timesteps' argument."
)
@property
def guidance_scale(self):
return self._guidance_scale
@property
def do_classifier_free_guidance(self):
return self._guidance_scale > 1
@property
def num_timesteps(self):
return self._num_timesteps
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt: Optional[Union[str, List[str]]] = None,
height: int = 1024,
width: int = 1024,
num_inference_steps: int = 60,
timesteps: List[float] = None,
guidance_scale: float = 8.0,
negative_prompt: Optional[Union[str, List[str]]] = None,
prompt_embeds: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
num_images_per_prompt: Optional[int] = 1,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.Tensor] = None,
output_type: Optional[str] = "pt",
return_dict: bool = True,
callback_on_step_end: Optional[Callable[[int, int, Dict], None]] = None,
callback_on_step_end_tensor_inputs: List[str] = ["latents"],
**kwargs,
):
"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
height (`int`, *optional*, defaults to 1024):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to 1024):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 60):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
timesteps (`List[int]`, *optional*):
Custom timesteps to use for the denoising process. If not defined, equal spaced `num_inference_steps`
timesteps are used. Must be in descending order.
guidance_scale (`float`, *optional*, defaults to 8.0):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`decoder_guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting
`decoder_guidance_scale > 1`. Higher guidance scale encourages to generate images that are closely
linked to the text `prompt`, usually at the expense of lower image quality.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `decoder_guidance_scale` is less than `1`).
prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.Tensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
One or a list of [torch generator(s)](https://pytorch.org/docs/stable/generated/torch.Generator.html)
to make generation deterministic.
latents (`torch.Tensor`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between: `"pil"` (`PIL.Image.Image`), `"np"`
(`np.array`) or `"pt"` (`torch.Tensor`).
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.ImagePipelineOutput`] instead of a plain tuple.
callback_on_step_end (`Callable`, *optional*):
A function that calls at the end of each denoising steps during the inference. The function is called
with the following arguments: `callback_on_step_end(self: DiffusionPipeline, step: int, timestep: int,
callback_kwargs: Dict)`. `callback_kwargs` will include a list of all tensors as specified by
`callback_on_step_end_tensor_inputs`.
callback_on_step_end_tensor_inputs (`List`, *optional*):
The list of tensor inputs for the `callback_on_step_end` function. The tensors specified in the list
will be passed as `callback_kwargs` argument. You will only be able to include variables listed in the
`._callback_tensor_inputs` attribute of your pipeline class.
Examples:
Returns:
[`~pipelines.WuerstchenPriorPipelineOutput`] or `tuple` [`~pipelines.WuerstchenPriorPipelineOutput`] if
`return_dict` is True, otherwise a `tuple`. When returning a tuple, the first element is a list with the
generated image embeddings.
"""
callback = kwargs.pop("callback", None)
callback_steps = kwargs.pop("callback_steps", None)
if callback is not None:
deprecate(
"callback",
"1.0.0",
"Passing `callback` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
if callback_steps is not None:
deprecate(
"callback_steps",
"1.0.0",
"Passing `callback_steps` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
if callback_on_step_end_tensor_inputs is not None and not all(
k in self._callback_tensor_inputs for k in callback_on_step_end_tensor_inputs
):
raise ValueError(
f"`callback_on_step_end_tensor_inputs` has to be in {self._callback_tensor_inputs}, but found {[k for k in callback_on_step_end_tensor_inputs if k not in self._callback_tensor_inputs]}"
)
# 0. Define commonly used variables
device = self._execution_device
self._guidance_scale = guidance_scale
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
# 1. Check inputs. Raise error if not correct
if prompt is not None and not isinstance(prompt, list):
if isinstance(prompt, str):
prompt = [prompt]
else:
raise TypeError(f"'prompt' must be of type 'list' or 'str', but got {type(prompt)}.")
if self.do_classifier_free_guidance:
if negative_prompt is not None and not isinstance(negative_prompt, list):
if isinstance(negative_prompt, str):
negative_prompt = [negative_prompt]
else:
raise TypeError(
f"'negative_prompt' must be of type 'list' or 'str', but got {type(negative_prompt)}."
)
self.check_inputs(
prompt,
negative_prompt,
num_inference_steps,
self.do_classifier_free_guidance,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
)
# 2. Encode caption
prompt_embeds, negative_prompt_embeds = self.encode_prompt(
prompt=prompt,
device=device,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=self.do_classifier_free_guidance,
negative_prompt=negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
text_encoder_hidden_states = (
torch.cat([prompt_embeds, negative_prompt_embeds]) if negative_prompt_embeds is not None else prompt_embeds
)
# 3. Determine latent shape of image embeddings
dtype = text_encoder_hidden_states.dtype
latent_height = ceil(height / self.config.resolution_multiple)
latent_width = ceil(width / self.config.resolution_multiple)
num_channels = self.prior.config.c_in
effnet_features_shape = (num_images_per_prompt * batch_size, num_channels, latent_height, latent_width)
# 4. Prepare and set timesteps
if timesteps is not None:
self.scheduler.set_timesteps(timesteps=timesteps, device=device)
timesteps = self.scheduler.timesteps
num_inference_steps = len(timesteps)
else:
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# 5. Prepare latents
latents = self.prepare_latents(effnet_features_shape, dtype, device, generator, latents, self.scheduler)
# 6. Run denoising loop
self._num_timesteps = len(timesteps[:-1])
for i, t in enumerate(self.progress_bar(timesteps[:-1])):
ratio = t.expand(latents.size(0)).to(dtype)
# 7. Denoise image embeddings
predicted_image_embedding = self.prior(
torch.cat([latents] * 2) if self.do_classifier_free_guidance else latents,
r=torch.cat([ratio] * 2) if self.do_classifier_free_guidance else ratio,
c=text_encoder_hidden_states,
)
# 8. Check for classifier free guidance and apply it
if self.do_classifier_free_guidance:
predicted_image_embedding_text, predicted_image_embedding_uncond = predicted_image_embedding.chunk(2)
predicted_image_embedding = torch.lerp(
predicted_image_embedding_uncond, predicted_image_embedding_text, self.guidance_scale
)
# 9. Renoise latents to next timestep
latents = self.scheduler.step(
model_output=predicted_image_embedding,
timestep=ratio,
sample=latents,
generator=generator,
).prev_sample
if callback_on_step_end is not None:
callback_kwargs = {}
for k in callback_on_step_end_tensor_inputs:
callback_kwargs[k] = locals()[k]
callback_outputs = callback_on_step_end(self, i, t, callback_kwargs)
latents = callback_outputs.pop("latents", latents)
text_encoder_hidden_states = callback_outputs.pop(
"text_encoder_hidden_states", text_encoder_hidden_states
)
negative_prompt_embeds = callback_outputs.pop("negative_prompt_embeds", negative_prompt_embeds)
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if XLA_AVAILABLE:
xm.mark_step()
# 10. Denormalize the latents
latents = latents * self.config.latent_mean - self.config.latent_std
# Offload all models
self.maybe_free_model_hooks()
if output_type == "np":
latents = latents.cpu().float().numpy()
if not return_dict:
return (latents,)
return WuerstchenPriorPipelineOutput(latents)
| diffusers/src/diffusers/pipelines/wuerstchen/pipeline_wuerstchen_prior.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/wuerstchen/pipeline_wuerstchen_prior.py",
"repo_id": "diffusers",
"token_count": 10773
} |
from typing import TYPE_CHECKING
from ...utils import (
DIFFUSERS_SLOW_IMPORT,
OptionalDependencyNotAvailable,
_LazyModule,
get_objects_from_module,
is_torch_available,
is_transformers_available,
)
_dummy_objects = {}
_import_structure = {}
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_pt_objects # noqa F403
_dummy_objects.update(get_objects_from_module(dummy_pt_objects))
else:
_import_structure["scheduling_karras_ve"] = ["KarrasVeScheduler"]
_import_structure["scheduling_sde_vp"] = ["ScoreSdeVpScheduler"]
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
try:
if not is_torch_available():
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_pt_objects import * # noqa F403
else:
from .scheduling_karras_ve import KarrasVeScheduler
from .scheduling_sde_vp import ScoreSdeVpScheduler
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
for name, value in _dummy_objects.items():
setattr(sys.modules[__name__], name, value)
| diffusers/src/diffusers/schedulers/deprecated/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/schedulers/deprecated/__init__.py",
"repo_id": "diffusers",
"token_count": 555
} |
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import importlib
import math
import os
from dataclasses import dataclass
from enum import Enum
from typing import Optional, Tuple, Union
import flax
import jax.numpy as jnp
from huggingface_hub.utils import validate_hf_hub_args
from ..utils import BaseOutput, PushToHubMixin
SCHEDULER_CONFIG_NAME = "scheduler_config.json"
# NOTE: We make this type an enum because it simplifies usage in docs and prevents
# circular imports when used for `_compatibles` within the schedulers module.
# When it's used as a type in pipelines, it really is a Union because the actual
# scheduler instance is passed in.
class FlaxKarrasDiffusionSchedulers(Enum):
FlaxDDIMScheduler = 1
FlaxDDPMScheduler = 2
FlaxPNDMScheduler = 3
FlaxLMSDiscreteScheduler = 4
FlaxDPMSolverMultistepScheduler = 5
FlaxEulerDiscreteScheduler = 6
@dataclass
class FlaxSchedulerOutput(BaseOutput):
"""
Base class for the scheduler's step function output.
Args:
prev_sample (`jnp.ndarray` of shape `(batch_size, num_channels, height, width)` for images):
Computed sample (x_{t-1}) of previous timestep. `prev_sample` should be used as next model input in the
denoising loop.
"""
prev_sample: jnp.ndarray
class FlaxSchedulerMixin(PushToHubMixin):
"""
Mixin containing common functions for the schedulers.
Class attributes:
- **_compatibles** (`List[str]`) -- A list of classes that are compatible with the parent class, so that
`from_config` can be used from a class different than the one used to save the config (should be overridden
by parent class).
"""
config_name = SCHEDULER_CONFIG_NAME
ignore_for_config = ["dtype"]
_compatibles = []
has_compatibles = True
@classmethod
@validate_hf_hub_args
def from_pretrained(
cls,
pretrained_model_name_or_path: Optional[Union[str, os.PathLike]] = None,
subfolder: Optional[str] = None,
return_unused_kwargs=False,
**kwargs,
):
r"""
Instantiate a Scheduler class from a pre-defined JSON-file.
Parameters:
pretrained_model_name_or_path (`str` or `os.PathLike`, *optional*):
Can be either:
- A string, the *model id* of a model repo on huggingface.co. Valid model ids should have an
organization name, like `google/ddpm-celebahq-256`.
- A path to a *directory* containing model weights saved using [`~SchedulerMixin.save_pretrained`],
e.g., `./my_model_directory/`.
subfolder (`str`, *optional*):
In case the relevant files are located inside a subfolder of the model repo (either remote in
huggingface.co or downloaded locally), you can specify the folder name here.
return_unused_kwargs (`bool`, *optional*, defaults to `False`):
Whether kwargs that are not consumed by the Python class should be returned or not.
cache_dir (`Union[str, os.PathLike]`, *optional*):
Path to a directory in which a downloaded pretrained model configuration should be cached if the
standard cache should not be used.
force_download (`bool`, *optional*, defaults to `False`):
Whether or not to force the (re-)download of the model weights and configuration files, overriding the
cached versions if they exist.
proxies (`Dict[str, str]`, *optional*):
A dictionary of proxy servers to use by protocol or endpoint, e.g., `{'http': 'foo.bar:3128',
'http://hostname': 'foo.bar:4012'}`. The proxies are used on each request.
output_loading_info(`bool`, *optional*, defaults to `False`):
Whether or not to also return a dictionary containing missing keys, unexpected keys and error messages.
local_files_only(`bool`, *optional*, defaults to `False`):
Whether or not to only look at local files (i.e., do not try to download the model).
token (`str` or *bool*, *optional*):
The token to use as HTTP bearer authorization for remote files. If `True`, will use the token generated
when running `transformers-cli login` (stored in `~/.huggingface`).
revision (`str`, *optional*, defaults to `"main"`):
The specific model version to use. It can be a branch name, a tag name, or a commit id, since we use a
git-based system for storing models and other artifacts on huggingface.co, so `revision` can be any
identifier allowed by git.
<Tip>
It is required to be logged in (`huggingface-cli login`) when you want to use private or [gated
models](https://huggingface.co/docs/hub/models-gated#gated-models).
</Tip>
<Tip>
Activate the special ["offline-mode"](https://huggingface.co/transformers/installation.html#offline-mode) to
use this method in a firewalled environment.
</Tip>
"""
config, kwargs = cls.load_config(
pretrained_model_name_or_path=pretrained_model_name_or_path,
subfolder=subfolder,
return_unused_kwargs=True,
**kwargs,
)
scheduler, unused_kwargs = cls.from_config(config, return_unused_kwargs=True, **kwargs)
if hasattr(scheduler, "create_state") and getattr(scheduler, "has_state", False):
state = scheduler.create_state()
if return_unused_kwargs:
return scheduler, state, unused_kwargs
return scheduler, state
def save_pretrained(self, save_directory: Union[str, os.PathLike], push_to_hub: bool = False, **kwargs):
"""
Save a scheduler configuration object to the directory `save_directory`, so that it can be re-loaded using the
[`~FlaxSchedulerMixin.from_pretrained`] class method.
Args:
save_directory (`str` or `os.PathLike`):
Directory where the configuration JSON file will be saved (will be created if it does not exist).
push_to_hub (`bool`, *optional*, defaults to `False`):
Whether or not to push your model to the Hugging Face Hub after saving it. You can specify the
repository you want to push to with `repo_id` (will default to the name of `save_directory` in your
namespace).
kwargs (`Dict[str, Any]`, *optional*):
Additional keyword arguments passed along to the [`~utils.PushToHubMixin.push_to_hub`] method.
"""
self.save_config(save_directory=save_directory, push_to_hub=push_to_hub, **kwargs)
@property
def compatibles(self):
"""
Returns all schedulers that are compatible with this scheduler
Returns:
`List[SchedulerMixin]`: List of compatible schedulers
"""
return self._get_compatibles()
@classmethod
def _get_compatibles(cls):
compatible_classes_str = list(set([cls.__name__] + cls._compatibles))
diffusers_library = importlib.import_module(__name__.split(".")[0])
compatible_classes = [
getattr(diffusers_library, c) for c in compatible_classes_str if hasattr(diffusers_library, c)
]
return compatible_classes
def broadcast_to_shape_from_left(x: jnp.ndarray, shape: Tuple[int]) -> jnp.ndarray:
assert len(shape) >= x.ndim
return jnp.broadcast_to(x.reshape(x.shape + (1,) * (len(shape) - x.ndim)), shape)
def betas_for_alpha_bar(num_diffusion_timesteps: int, max_beta=0.999, dtype=jnp.float32) -> jnp.ndarray:
"""
Create a beta schedule that discretizes the given alpha_t_bar function, which defines the cumulative product of
(1-beta) over time from t = [0,1].
Contains a function alpha_bar that takes an argument t and transforms it to the cumulative product of (1-beta) up
to that part of the diffusion process.
Args:
num_diffusion_timesteps (`int`): the number of betas to produce.
max_beta (`float`): the maximum beta to use; use values lower than 1 to
prevent singularities.
Returns:
betas (`jnp.ndarray`): the betas used by the scheduler to step the model outputs
"""
def alpha_bar(time_step):
return math.cos((time_step + 0.008) / 1.008 * math.pi / 2) ** 2
betas = []
for i in range(num_diffusion_timesteps):
t1 = i / num_diffusion_timesteps
t2 = (i + 1) / num_diffusion_timesteps
betas.append(min(1 - alpha_bar(t2) / alpha_bar(t1), max_beta))
return jnp.array(betas, dtype=dtype)
@flax.struct.dataclass
class CommonSchedulerState:
alphas: jnp.ndarray
betas: jnp.ndarray
alphas_cumprod: jnp.ndarray
@classmethod
def create(cls, scheduler):
config = scheduler.config
if config.trained_betas is not None:
betas = jnp.asarray(config.trained_betas, dtype=scheduler.dtype)
elif config.beta_schedule == "linear":
betas = jnp.linspace(config.beta_start, config.beta_end, config.num_train_timesteps, dtype=scheduler.dtype)
elif config.beta_schedule == "scaled_linear":
# this schedule is very specific to the latent diffusion model.
betas = (
jnp.linspace(
config.beta_start**0.5, config.beta_end**0.5, config.num_train_timesteps, dtype=scheduler.dtype
)
** 2
)
elif config.beta_schedule == "squaredcos_cap_v2":
# Glide cosine schedule
betas = betas_for_alpha_bar(config.num_train_timesteps, dtype=scheduler.dtype)
else:
raise NotImplementedError(
f"beta_schedule {config.beta_schedule} is not implemented for scheduler {scheduler.__class__.__name__}"
)
alphas = 1.0 - betas
alphas_cumprod = jnp.cumprod(alphas, axis=0)
return cls(
alphas=alphas,
betas=betas,
alphas_cumprod=alphas_cumprod,
)
def get_sqrt_alpha_prod(
state: CommonSchedulerState, original_samples: jnp.ndarray, noise: jnp.ndarray, timesteps: jnp.ndarray
):
alphas_cumprod = state.alphas_cumprod
sqrt_alpha_prod = alphas_cumprod[timesteps] ** 0.5
sqrt_alpha_prod = sqrt_alpha_prod.flatten()
sqrt_alpha_prod = broadcast_to_shape_from_left(sqrt_alpha_prod, original_samples.shape)
sqrt_one_minus_alpha_prod = (1 - alphas_cumprod[timesteps]) ** 0.5
sqrt_one_minus_alpha_prod = sqrt_one_minus_alpha_prod.flatten()
sqrt_one_minus_alpha_prod = broadcast_to_shape_from_left(sqrt_one_minus_alpha_prod, original_samples.shape)
return sqrt_alpha_prod, sqrt_one_minus_alpha_prod
def add_noise_common(
state: CommonSchedulerState, original_samples: jnp.ndarray, noise: jnp.ndarray, timesteps: jnp.ndarray
):
sqrt_alpha_prod, sqrt_one_minus_alpha_prod = get_sqrt_alpha_prod(state, original_samples, noise, timesteps)
noisy_samples = sqrt_alpha_prod * original_samples + sqrt_one_minus_alpha_prod * noise
return noisy_samples
def get_velocity_common(state: CommonSchedulerState, sample: jnp.ndarray, noise: jnp.ndarray, timesteps: jnp.ndarray):
sqrt_alpha_prod, sqrt_one_minus_alpha_prod = get_sqrt_alpha_prod(state, sample, noise, timesteps)
velocity = sqrt_alpha_prod * noise - sqrt_one_minus_alpha_prod * sample
return velocity
| diffusers/src/diffusers/schedulers/scheduling_utils_flax.py/0 | {
"file_path": "diffusers/src/diffusers/schedulers/scheduling_utils_flax.py",
"repo_id": "diffusers",
"token_count": 4948
} |
# This file is autogenerated by the command `make fix-copies`, do not edit.
from ..utils import DummyObject, requires_backends
class StableDiffusionKDiffusionPipeline(metaclass=DummyObject):
_backends = ["torch", "transformers", "k_diffusion"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch", "transformers", "k_diffusion"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch", "transformers", "k_diffusion"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch", "transformers", "k_diffusion"])
class StableDiffusionXLKDiffusionPipeline(metaclass=DummyObject):
_backends = ["torch", "transformers", "k_diffusion"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch", "transformers", "k_diffusion"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch", "transformers", "k_diffusion"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch", "transformers", "k_diffusion"])
| diffusers/src/diffusers/utils/dummy_torch_and_transformers_and_k_diffusion_objects.py/0 | {
"file_path": "diffusers/src/diffusers/utils/dummy_torch_and_transformers_and_k_diffusion_objects.py",
"repo_id": "diffusers",
"token_count": 451
} |
import functools
import importlib
import importlib.metadata
import inspect
import io
import logging
import multiprocessing
import os
import random
import re
import struct
import sys
import tempfile
import time
import unittest
import urllib.parse
from contextlib import contextmanager
from io import BytesIO, StringIO
from pathlib import Path
from typing import Callable, Dict, List, Optional, Union
import numpy as np
import PIL.Image
import PIL.ImageOps
import requests
from numpy.linalg import norm
from packaging import version
from .import_utils import (
BACKENDS_MAPPING,
is_accelerate_available,
is_bitsandbytes_available,
is_compel_available,
is_flax_available,
is_gguf_available,
is_note_seq_available,
is_onnx_available,
is_opencv_available,
is_peft_available,
is_timm_available,
is_torch_available,
is_torch_version,
is_torchao_available,
is_torchsde_available,
is_transformers_available,
)
from .logging import get_logger
global_rng = random.Random()
logger = get_logger(__name__)
_required_peft_version = is_peft_available() and version.parse(
version.parse(importlib.metadata.version("peft")).base_version
) > version.parse("0.5")
_required_transformers_version = is_transformers_available() and version.parse(
version.parse(importlib.metadata.version("transformers")).base_version
) > version.parse("4.33")
USE_PEFT_BACKEND = _required_peft_version and _required_transformers_version
BIG_GPU_MEMORY = int(os.getenv("BIG_GPU_MEMORY", 40))
if is_torch_available():
import torch
# Set a backend environment variable for any extra module import required for a custom accelerator
if "DIFFUSERS_TEST_BACKEND" in os.environ:
backend = os.environ["DIFFUSERS_TEST_BACKEND"]
try:
_ = importlib.import_module(backend)
except ModuleNotFoundError as e:
raise ModuleNotFoundError(
f"Failed to import `DIFFUSERS_TEST_BACKEND` '{backend}'! This should be the name of an installed module \
to enable a specified backend.):\n{e}"
) from e
if "DIFFUSERS_TEST_DEVICE" in os.environ:
torch_device = os.environ["DIFFUSERS_TEST_DEVICE"]
try:
# try creating device to see if provided device is valid
_ = torch.device(torch_device)
except RuntimeError as e:
raise RuntimeError(
f"Unknown testing device specified by environment variable `DIFFUSERS_TEST_DEVICE`: {torch_device}"
) from e
logger.info(f"torch_device overrode to {torch_device}")
else:
if torch.cuda.is_available():
torch_device = "cuda"
elif torch.xpu.is_available():
torch_device = "xpu"
else:
torch_device = "cpu"
is_torch_higher_equal_than_1_12 = version.parse(
version.parse(torch.__version__).base_version
) >= version.parse("1.12")
if is_torch_higher_equal_than_1_12:
# Some builds of torch 1.12 don't have the mps backend registered. See #892 for more details
mps_backend_registered = hasattr(torch.backends, "mps")
torch_device = "mps" if (mps_backend_registered and torch.backends.mps.is_available()) else torch_device
def torch_all_close(a, b, *args, **kwargs):
if not is_torch_available():
raise ValueError("PyTorch needs to be installed to use this function.")
if not torch.allclose(a, b, *args, **kwargs):
assert False, f"Max diff is absolute {(a - b).abs().max()}. Diff tensor is {(a - b).abs()}."
return True
def numpy_cosine_similarity_distance(a, b):
similarity = np.dot(a, b) / (norm(a) * norm(b))
distance = 1.0 - similarity.mean()
return distance
def print_tensor_test(
tensor,
limit_to_slices=None,
max_torch_print=None,
filename="test_corrections.txt",
expected_tensor_name="expected_slice",
):
if max_torch_print:
torch.set_printoptions(threshold=10_000)
test_name = os.environ.get("PYTEST_CURRENT_TEST")
if not torch.is_tensor(tensor):
tensor = torch.from_numpy(tensor)
if limit_to_slices:
tensor = tensor[0, -3:, -3:, -1]
tensor_str = str(tensor.detach().cpu().flatten().to(torch.float32)).replace("\n", "")
# format is usually:
# expected_slice = np.array([-0.5713, -0.3018, -0.9814, 0.04663, -0.879, 0.76, -1.734, 0.1044, 1.161])
output_str = tensor_str.replace("tensor", f"{expected_tensor_name} = np.array")
test_file, test_class, test_fn = test_name.split("::")
test_fn = test_fn.split()[0]
with open(filename, "a") as f:
print("::".join([test_file, test_class, test_fn, output_str]), file=f)
def get_tests_dir(append_path=None):
"""
Args:
append_path: optional path to append to the tests dir path
Return:
The full path to the `tests` dir, so that the tests can be invoked from anywhere. Optionally `append_path` is
joined after the `tests` dir the former is provided.
"""
# this function caller's __file__
caller__file__ = inspect.stack()[1][1]
tests_dir = os.path.abspath(os.path.dirname(caller__file__))
while not tests_dir.endswith("tests"):
tests_dir = os.path.dirname(tests_dir)
if append_path:
return Path(tests_dir, append_path).as_posix()
else:
return tests_dir
# Taken from the following PR:
# https://github.com/huggingface/accelerate/pull/1964
def str_to_bool(value) -> int:
"""
Converts a string representation of truth to `True` (1) or `False` (0). True values are `y`, `yes`, `t`, `true`,
`on`, and `1`; False value are `n`, `no`, `f`, `false`, `off`, and `0`;
"""
value = value.lower()
if value in ("y", "yes", "t", "true", "on", "1"):
return 1
elif value in ("n", "no", "f", "false", "off", "0"):
return 0
else:
raise ValueError(f"invalid truth value {value}")
def parse_flag_from_env(key, default=False):
try:
value = os.environ[key]
except KeyError:
# KEY isn't set, default to `default`.
_value = default
else:
# KEY is set, convert it to True or False.
try:
_value = str_to_bool(value)
except ValueError:
# More values are supported, but let's keep the message simple.
raise ValueError(f"If set, {key} must be yes or no.")
return _value
_run_slow_tests = parse_flag_from_env("RUN_SLOW", default=False)
_run_nightly_tests = parse_flag_from_env("RUN_NIGHTLY", default=False)
_run_compile_tests = parse_flag_from_env("RUN_COMPILE", default=False)
def floats_tensor(shape, scale=1.0, rng=None, name=None):
"""Creates a random float32 tensor"""
if rng is None:
rng = global_rng
total_dims = 1
for dim in shape:
total_dims *= dim
values = []
for _ in range(total_dims):
values.append(rng.random() * scale)
return torch.tensor(data=values, dtype=torch.float).view(shape).contiguous()
def slow(test_case):
"""
Decorator marking a test as slow.
Slow tests are skipped by default. Set the RUN_SLOW environment variable to a truthy value to run them.
"""
return unittest.skipUnless(_run_slow_tests, "test is slow")(test_case)
def nightly(test_case):
"""
Decorator marking a test that runs nightly in the diffusers CI.
Slow tests are skipped by default. Set the RUN_NIGHTLY environment variable to a truthy value to run them.
"""
return unittest.skipUnless(_run_nightly_tests, "test is nightly")(test_case)
def is_torch_compile(test_case):
"""
Decorator marking a test that runs compile tests in the diffusers CI.
Compile tests are skipped by default. Set the RUN_COMPILE environment variable to a truthy value to run them.
"""
return unittest.skipUnless(_run_compile_tests, "test is torch compile")(test_case)
def require_torch(test_case):
"""
Decorator marking a test that requires PyTorch. These tests are skipped when PyTorch isn't installed.
"""
return unittest.skipUnless(is_torch_available(), "test requires PyTorch")(test_case)
def require_torch_2(test_case):
"""
Decorator marking a test that requires PyTorch 2. These tests are skipped when it isn't installed.
"""
return unittest.skipUnless(is_torch_available() and is_torch_version(">=", "2.0.0"), "test requires PyTorch 2")(
test_case
)
def require_torch_version_greater_equal(torch_version):
"""Decorator marking a test that requires torch with a specific version or greater."""
def decorator(test_case):
correct_torch_version = is_torch_available() and is_torch_version(">=", torch_version)
return unittest.skipUnless(
correct_torch_version, f"test requires torch with the version greater than or equal to {torch_version}"
)(test_case)
return decorator
def require_torch_gpu(test_case):
"""Decorator marking a test that requires CUDA and PyTorch."""
return unittest.skipUnless(is_torch_available() and torch_device == "cuda", "test requires PyTorch+CUDA")(
test_case
)
# These decorators are for accelerator-specific behaviours that are not GPU-specific
def require_torch_accelerator(test_case):
"""Decorator marking a test that requires an accelerator backend and PyTorch."""
return unittest.skipUnless(is_torch_available() and torch_device != "cpu", "test requires accelerator+PyTorch")(
test_case
)
def require_torch_multi_gpu(test_case):
"""
Decorator marking a test that requires a multi-GPU setup (in PyTorch). These tests are skipped on a machine without
multiple GPUs. To run *only* the multi_gpu tests, assuming all test names contain multi_gpu: $ pytest -sv ./tests
-k "multi_gpu"
"""
if not is_torch_available():
return unittest.skip("test requires PyTorch")(test_case)
import torch
return unittest.skipUnless(torch.cuda.device_count() > 1, "test requires multiple GPUs")(test_case)
def require_torch_accelerator_with_fp16(test_case):
"""Decorator marking a test that requires an accelerator with support for the FP16 data type."""
return unittest.skipUnless(_is_torch_fp16_available(torch_device), "test requires accelerator with fp16 support")(
test_case
)
def require_torch_accelerator_with_fp64(test_case):
"""Decorator marking a test that requires an accelerator with support for the FP64 data type."""
return unittest.skipUnless(_is_torch_fp64_available(torch_device), "test requires accelerator with fp64 support")(
test_case
)
def require_big_gpu_with_torch_cuda(test_case):
"""
Decorator marking a test that requires a bigger GPU (24GB) for execution. Some example pipelines: Flux, SD3, Cog,
etc.
"""
if not is_torch_available():
return unittest.skip("test requires PyTorch")(test_case)
import torch
if not torch.cuda.is_available():
return unittest.skip("test requires PyTorch CUDA")(test_case)
device_properties = torch.cuda.get_device_properties(0)
total_memory = device_properties.total_memory / (1024**3)
return unittest.skipUnless(
total_memory >= BIG_GPU_MEMORY, f"test requires a GPU with at least {BIG_GPU_MEMORY} GB memory"
)(test_case)
def require_torch_accelerator_with_training(test_case):
"""Decorator marking a test that requires an accelerator with support for training."""
return unittest.skipUnless(
is_torch_available() and backend_supports_training(torch_device),
"test requires accelerator with training support",
)(test_case)
def skip_mps(test_case):
"""Decorator marking a test to skip if torch_device is 'mps'"""
return unittest.skipUnless(torch_device != "mps", "test requires non 'mps' device")(test_case)
def require_flax(test_case):
"""
Decorator marking a test that requires JAX & Flax. These tests are skipped when one / both are not installed
"""
return unittest.skipUnless(is_flax_available(), "test requires JAX & Flax")(test_case)
def require_compel(test_case):
"""
Decorator marking a test that requires compel: https://github.com/damian0815/compel. These tests are skipped when
the library is not installed.
"""
return unittest.skipUnless(is_compel_available(), "test requires compel")(test_case)
def require_onnxruntime(test_case):
"""
Decorator marking a test that requires onnxruntime. These tests are skipped when onnxruntime isn't installed.
"""
return unittest.skipUnless(is_onnx_available(), "test requires onnxruntime")(test_case)
def require_note_seq(test_case):
"""
Decorator marking a test that requires note_seq. These tests are skipped when note_seq isn't installed.
"""
return unittest.skipUnless(is_note_seq_available(), "test requires note_seq")(test_case)
def require_accelerator(test_case):
"""
Decorator marking a test that requires a hardware accelerator backend. These tests are skipped when there are no
hardware accelerator available.
"""
return unittest.skipUnless(torch_device != "cpu", "test requires a hardware accelerator")(test_case)
def require_torchsde(test_case):
"""
Decorator marking a test that requires torchsde. These tests are skipped when torchsde isn't installed.
"""
return unittest.skipUnless(is_torchsde_available(), "test requires torchsde")(test_case)
def require_peft_backend(test_case):
"""
Decorator marking a test that requires PEFT backend, this would require some specific versions of PEFT and
transformers.
"""
return unittest.skipUnless(USE_PEFT_BACKEND, "test requires PEFT backend")(test_case)
def require_timm(test_case):
"""
Decorator marking a test that requires timm. These tests are skipped when timm isn't installed.
"""
return unittest.skipUnless(is_timm_available(), "test requires timm")(test_case)
def require_bitsandbytes(test_case):
"""
Decorator marking a test that requires bitsandbytes. These tests are skipped when bitsandbytes isn't installed.
"""
return unittest.skipUnless(is_bitsandbytes_available(), "test requires bitsandbytes")(test_case)
def require_accelerate(test_case):
"""
Decorator marking a test that requires accelerate. These tests are skipped when accelerate isn't installed.
"""
return unittest.skipUnless(is_accelerate_available(), "test requires accelerate")(test_case)
def require_peft_version_greater(peft_version):
"""
Decorator marking a test that requires PEFT backend with a specific version, this would require some specific
versions of PEFT and transformers.
"""
def decorator(test_case):
correct_peft_version = is_peft_available() and version.parse(
version.parse(importlib.metadata.version("peft")).base_version
) > version.parse(peft_version)
return unittest.skipUnless(
correct_peft_version, f"test requires PEFT backend with the version greater than {peft_version}"
)(test_case)
return decorator
def require_transformers_version_greater(transformers_version):
"""
Decorator marking a test that requires transformers with a specific version, this would require some specific
versions of PEFT and transformers.
"""
def decorator(test_case):
correct_transformers_version = is_transformers_available() and version.parse(
version.parse(importlib.metadata.version("transformers")).base_version
) > version.parse(transformers_version)
return unittest.skipUnless(
correct_transformers_version,
f"test requires transformers with the version greater than {transformers_version}",
)(test_case)
return decorator
def require_accelerate_version_greater(accelerate_version):
def decorator(test_case):
correct_accelerate_version = is_accelerate_available() and version.parse(
version.parse(importlib.metadata.version("accelerate")).base_version
) > version.parse(accelerate_version)
return unittest.skipUnless(
correct_accelerate_version, f"Test requires accelerate with the version greater than {accelerate_version}."
)(test_case)
return decorator
def require_bitsandbytes_version_greater(bnb_version):
def decorator(test_case):
correct_bnb_version = is_bitsandbytes_available() and version.parse(
version.parse(importlib.metadata.version("bitsandbytes")).base_version
) > version.parse(bnb_version)
return unittest.skipUnless(
correct_bnb_version, f"Test requires bitsandbytes with the version greater than {bnb_version}."
)(test_case)
return decorator
def require_hf_hub_version_greater(hf_hub_version):
def decorator(test_case):
correct_hf_hub_version = version.parse(
version.parse(importlib.metadata.version("huggingface_hub")).base_version
) > version.parse(hf_hub_version)
return unittest.skipUnless(
correct_hf_hub_version, f"Test requires huggingface_hub with the version greater than {hf_hub_version}."
)(test_case)
return decorator
def require_gguf_version_greater_or_equal(gguf_version):
def decorator(test_case):
correct_gguf_version = is_gguf_available() and version.parse(
version.parse(importlib.metadata.version("gguf")).base_version
) >= version.parse(gguf_version)
return unittest.skipUnless(
correct_gguf_version, f"Test requires gguf with the version greater than {gguf_version}."
)(test_case)
return decorator
def require_torchao_version_greater_or_equal(torchao_version):
def decorator(test_case):
correct_torchao_version = is_torchao_available() and version.parse(
version.parse(importlib.metadata.version("torchao")).base_version
) >= version.parse(torchao_version)
return unittest.skipUnless(
correct_torchao_version, f"Test requires torchao with version greater than {torchao_version}."
)(test_case)
return decorator
def deprecate_after_peft_backend(test_case):
"""
Decorator marking a test that will be skipped after PEFT backend
"""
return unittest.skipUnless(not USE_PEFT_BACKEND, "test skipped in favor of PEFT backend")(test_case)
def get_python_version():
sys_info = sys.version_info
major, minor = sys_info.major, sys_info.minor
return major, minor
def load_numpy(arry: Union[str, np.ndarray], local_path: Optional[str] = None) -> np.ndarray:
if isinstance(arry, str):
if local_path is not None:
# local_path can be passed to correct images of tests
return Path(local_path, arry.split("/")[-5], arry.split("/")[-2], arry.split("/")[-1]).as_posix()
elif arry.startswith("http://") or arry.startswith("https://"):
response = requests.get(arry)
response.raise_for_status()
arry = np.load(BytesIO(response.content))
elif os.path.isfile(arry):
arry = np.load(arry)
else:
raise ValueError(
f"Incorrect path or url, URLs must start with `http://` or `https://`, and {arry} is not a valid path"
)
elif isinstance(arry, np.ndarray):
pass
else:
raise ValueError(
"Incorrect format used for numpy ndarray. Should be an url linking to an image, a local path, or a"
" ndarray."
)
return arry
def load_pt(url: str):
response = requests.get(url)
response.raise_for_status()
arry = torch.load(BytesIO(response.content))
return arry
def load_image(image: Union[str, PIL.Image.Image]) -> PIL.Image.Image:
"""
Loads `image` to a PIL Image.
Args:
image (`str` or `PIL.Image.Image`):
The image to convert to the PIL Image format.
Returns:
`PIL.Image.Image`:
A PIL Image.
"""
if isinstance(image, str):
if image.startswith("http://") or image.startswith("https://"):
image = PIL.Image.open(requests.get(image, stream=True).raw)
elif os.path.isfile(image):
image = PIL.Image.open(image)
else:
raise ValueError(
f"Incorrect path or url, URLs must start with `http://` or `https://`, and {image} is not a valid path"
)
elif isinstance(image, PIL.Image.Image):
image = image
else:
raise ValueError(
"Incorrect format used for image. Should be an url linking to an image, a local path, or a PIL image."
)
image = PIL.ImageOps.exif_transpose(image)
image = image.convert("RGB")
return image
def preprocess_image(image: PIL.Image, batch_size: int):
w, h = image.size
w, h = (x - x % 8 for x in (w, h)) # resize to integer multiple of 8
image = image.resize((w, h), resample=PIL.Image.LANCZOS)
image = np.array(image).astype(np.float32) / 255.0
image = np.vstack([image[None].transpose(0, 3, 1, 2)] * batch_size)
image = torch.from_numpy(image)
return 2.0 * image - 1.0
def export_to_gif(image: List[PIL.Image.Image], output_gif_path: str = None) -> str:
if output_gif_path is None:
output_gif_path = tempfile.NamedTemporaryFile(suffix=".gif").name
image[0].save(
output_gif_path,
save_all=True,
append_images=image[1:],
optimize=False,
duration=100,
loop=0,
)
return output_gif_path
@contextmanager
def buffered_writer(raw_f):
f = io.BufferedWriter(raw_f)
yield f
f.flush()
def export_to_ply(mesh, output_ply_path: str = None):
"""
Write a PLY file for a mesh.
"""
if output_ply_path is None:
output_ply_path = tempfile.NamedTemporaryFile(suffix=".ply").name
coords = mesh.verts.detach().cpu().numpy()
faces = mesh.faces.cpu().numpy()
rgb = np.stack([mesh.vertex_channels[x].detach().cpu().numpy() for x in "RGB"], axis=1)
with buffered_writer(open(output_ply_path, "wb")) as f:
f.write(b"ply\n")
f.write(b"format binary_little_endian 1.0\n")
f.write(bytes(f"element vertex {len(coords)}\n", "ascii"))
f.write(b"property float x\n")
f.write(b"property float y\n")
f.write(b"property float z\n")
if rgb is not None:
f.write(b"property uchar red\n")
f.write(b"property uchar green\n")
f.write(b"property uchar blue\n")
if faces is not None:
f.write(bytes(f"element face {len(faces)}\n", "ascii"))
f.write(b"property list uchar int vertex_index\n")
f.write(b"end_header\n")
if rgb is not None:
rgb = (rgb * 255.499).round().astype(int)
vertices = [
(*coord, *rgb)
for coord, rgb in zip(
coords.tolist(),
rgb.tolist(),
)
]
format = struct.Struct("<3f3B")
for item in vertices:
f.write(format.pack(*item))
else:
format = struct.Struct("<3f")
for vertex in coords.tolist():
f.write(format.pack(*vertex))
if faces is not None:
format = struct.Struct("<B3I")
for tri in faces.tolist():
f.write(format.pack(len(tri), *tri))
return output_ply_path
def export_to_obj(mesh, output_obj_path: str = None):
if output_obj_path is None:
output_obj_path = tempfile.NamedTemporaryFile(suffix=".obj").name
verts = mesh.verts.detach().cpu().numpy()
faces = mesh.faces.cpu().numpy()
vertex_colors = np.stack([mesh.vertex_channels[x].detach().cpu().numpy() for x in "RGB"], axis=1)
vertices = [
"{} {} {} {} {} {}".format(*coord, *color) for coord, color in zip(verts.tolist(), vertex_colors.tolist())
]
faces = ["f {} {} {}".format(str(tri[0] + 1), str(tri[1] + 1), str(tri[2] + 1)) for tri in faces.tolist()]
combined_data = ["v " + vertex for vertex in vertices] + faces
with open(output_obj_path, "w") as f:
f.writelines("\n".join(combined_data))
def export_to_video(video_frames: List[np.ndarray], output_video_path: str = None) -> str:
if is_opencv_available():
import cv2
else:
raise ImportError(BACKENDS_MAPPING["opencv"][1].format("export_to_video"))
if output_video_path is None:
output_video_path = tempfile.NamedTemporaryFile(suffix=".mp4").name
fourcc = cv2.VideoWriter_fourcc(*"mp4v")
h, w, c = video_frames[0].shape
video_writer = cv2.VideoWriter(output_video_path, fourcc, fps=8, frameSize=(w, h))
for i in range(len(video_frames)):
img = cv2.cvtColor(video_frames[i], cv2.COLOR_RGB2BGR)
video_writer.write(img)
return output_video_path
def load_hf_numpy(path) -> np.ndarray:
base_url = "https://huggingface.co/datasets/fusing/diffusers-testing/resolve/main"
if not path.startswith("http://") and not path.startswith("https://"):
path = os.path.join(base_url, urllib.parse.quote(path))
return load_numpy(path)
# --- pytest conf functions --- #
# to avoid multiple invocation from tests/conftest.py and examples/conftest.py - make sure it's called only once
pytest_opt_registered = {}
def pytest_addoption_shared(parser):
"""
This function is to be called from `conftest.py` via `pytest_addoption` wrapper that has to be defined there.
It allows loading both `conftest.py` files at once without causing a failure due to adding the same `pytest`
option.
"""
option = "--make-reports"
if option not in pytest_opt_registered:
parser.addoption(
option,
action="store",
default=False,
help="generate report files. The value of this option is used as a prefix to report names",
)
pytest_opt_registered[option] = 1
def pytest_terminal_summary_main(tr, id):
"""
Generate multiple reports at the end of test suite run - each report goes into a dedicated file in the current
directory. The report files are prefixed with the test suite name.
This function emulates --duration and -rA pytest arguments.
This function is to be called from `conftest.py` via `pytest_terminal_summary` wrapper that has to be defined
there.
Args:
- tr: `terminalreporter` passed from `conftest.py`
- id: unique id like `tests` or `examples` that will be incorporated into the final reports filenames - this is
needed as some jobs have multiple runs of pytest, so we can't have them overwrite each other.
NB: this functions taps into a private _pytest API and while unlikely, it could break should
pytest do internal changes - also it calls default internal methods of terminalreporter which
can be hijacked by various `pytest-` plugins and interfere.
"""
from _pytest.config import create_terminal_writer
if not len(id):
id = "tests"
config = tr.config
orig_writer = config.get_terminal_writer()
orig_tbstyle = config.option.tbstyle
orig_reportchars = tr.reportchars
dir = "reports"
Path(dir).mkdir(parents=True, exist_ok=True)
report_files = {
k: f"{dir}/{id}_{k}.txt"
for k in [
"durations",
"errors",
"failures_long",
"failures_short",
"failures_line",
"passes",
"stats",
"summary_short",
"warnings",
]
}
# custom durations report
# note: there is no need to call pytest --durations=XX to get this separate report
# adapted from https://github.com/pytest-dev/pytest/blob/897f151e/src/_pytest/runner.py#L66
dlist = []
for replist in tr.stats.values():
for rep in replist:
if hasattr(rep, "duration"):
dlist.append(rep)
if dlist:
dlist.sort(key=lambda x: x.duration, reverse=True)
with open(report_files["durations"], "w") as f:
durations_min = 0.05 # sec
f.write("slowest durations\n")
for i, rep in enumerate(dlist):
if rep.duration < durations_min:
f.write(f"{len(dlist)-i} durations < {durations_min} secs were omitted")
break
f.write(f"{rep.duration:02.2f}s {rep.when:<8} {rep.nodeid}\n")
def summary_failures_short(tr):
# expecting that the reports were --tb=long (default) so we chop them off here to the last frame
reports = tr.getreports("failed")
if not reports:
return
tr.write_sep("=", "FAILURES SHORT STACK")
for rep in reports:
msg = tr._getfailureheadline(rep)
tr.write_sep("_", msg, red=True, bold=True)
# chop off the optional leading extra frames, leaving only the last one
longrepr = re.sub(r".*_ _ _ (_ ){10,}_ _ ", "", rep.longreprtext, 0, re.M | re.S)
tr._tw.line(longrepr)
# note: not printing out any rep.sections to keep the report short
# use ready-made report funcs, we are just hijacking the filehandle to log to a dedicated file each
# adapted from https://github.com/pytest-dev/pytest/blob/897f151e/src/_pytest/terminal.py#L814
# note: some pytest plugins may interfere by hijacking the default `terminalreporter` (e.g.
# pytest-instafail does that)
# report failures with line/short/long styles
config.option.tbstyle = "auto" # full tb
with open(report_files["failures_long"], "w") as f:
tr._tw = create_terminal_writer(config, f)
tr.summary_failures()
# config.option.tbstyle = "short" # short tb
with open(report_files["failures_short"], "w") as f:
tr._tw = create_terminal_writer(config, f)
summary_failures_short(tr)
config.option.tbstyle = "line" # one line per error
with open(report_files["failures_line"], "w") as f:
tr._tw = create_terminal_writer(config, f)
tr.summary_failures()
with open(report_files["errors"], "w") as f:
tr._tw = create_terminal_writer(config, f)
tr.summary_errors()
with open(report_files["warnings"], "w") as f:
tr._tw = create_terminal_writer(config, f)
tr.summary_warnings() # normal warnings
tr.summary_warnings() # final warnings
tr.reportchars = "wPpsxXEf" # emulate -rA (used in summary_passes() and short_test_summary())
with open(report_files["passes"], "w") as f:
tr._tw = create_terminal_writer(config, f)
tr.summary_passes()
with open(report_files["summary_short"], "w") as f:
tr._tw = create_terminal_writer(config, f)
tr.short_test_summary()
with open(report_files["stats"], "w") as f:
tr._tw = create_terminal_writer(config, f)
tr.summary_stats()
# restore:
tr._tw = orig_writer
tr.reportchars = orig_reportchars
config.option.tbstyle = orig_tbstyle
# Copied from https://github.com/huggingface/transformers/blob/000e52aec8850d3fe2f360adc6fd256e5b47fe4c/src/transformers/testing_utils.py#L1905
def is_flaky(max_attempts: int = 5, wait_before_retry: Optional[float] = None, description: Optional[str] = None):
"""
To decorate flaky tests. They will be retried on failures.
Args:
max_attempts (`int`, *optional*, defaults to 5):
The maximum number of attempts to retry the flaky test.
wait_before_retry (`float`, *optional*):
If provided, will wait that number of seconds before retrying the test.
description (`str`, *optional*):
A string to describe the situation (what / where / why is flaky, link to GH issue/PR comments, errors,
etc.)
"""
def decorator(test_func_ref):
@functools.wraps(test_func_ref)
def wrapper(*args, **kwargs):
retry_count = 1
while retry_count < max_attempts:
try:
return test_func_ref(*args, **kwargs)
except Exception as err:
print(f"Test failed with {err} at try {retry_count}/{max_attempts}.", file=sys.stderr)
if wait_before_retry is not None:
time.sleep(wait_before_retry)
retry_count += 1
return test_func_ref(*args, **kwargs)
return wrapper
return decorator
# Taken from: https://github.com/huggingface/transformers/blob/3658488ff77ff8d45101293e749263acf437f4d5/src/transformers/testing_utils.py#L1787
def run_test_in_subprocess(test_case, target_func, inputs=None, timeout=None):
"""
To run a test in a subprocess. In particular, this can avoid (GPU) memory issue.
Args:
test_case (`unittest.TestCase`):
The test that will run `target_func`.
target_func (`Callable`):
The function implementing the actual testing logic.
inputs (`dict`, *optional*, defaults to `None`):
The inputs that will be passed to `target_func` through an (input) queue.
timeout (`int`, *optional*, defaults to `None`):
The timeout (in seconds) that will be passed to the input and output queues. If not specified, the env.
variable `PYTEST_TIMEOUT` will be checked. If still `None`, its value will be set to `600`.
"""
if timeout is None:
timeout = int(os.environ.get("PYTEST_TIMEOUT", 600))
start_methohd = "spawn"
ctx = multiprocessing.get_context(start_methohd)
input_queue = ctx.Queue(1)
output_queue = ctx.JoinableQueue(1)
# We can't send `unittest.TestCase` to the child, otherwise we get issues regarding pickle.
input_queue.put(inputs, timeout=timeout)
process = ctx.Process(target=target_func, args=(input_queue, output_queue, timeout))
process.start()
# Kill the child process if we can't get outputs from it in time: otherwise, the hanging subprocess prevents
# the test to exit properly.
try:
results = output_queue.get(timeout=timeout)
output_queue.task_done()
except Exception as e:
process.terminate()
test_case.fail(e)
process.join(timeout=timeout)
if results["error"] is not None:
test_case.fail(f'{results["error"]}')
class CaptureLogger:
"""
Args:
Context manager to capture `logging` streams
logger: 'logging` logger object
Returns:
The captured output is available via `self.out`
Example:
```python
>>> from diffusers import logging
>>> from diffusers.testing_utils import CaptureLogger
>>> msg = "Testing 1, 2, 3"
>>> logging.set_verbosity_info()
>>> logger = logging.get_logger("diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.py")
>>> with CaptureLogger(logger) as cl:
... logger.info(msg)
>>> assert cl.out, msg + "\n"
```
"""
def __init__(self, logger):
self.logger = logger
self.io = StringIO()
self.sh = logging.StreamHandler(self.io)
self.out = ""
def __enter__(self):
self.logger.addHandler(self.sh)
return self
def __exit__(self, *exc):
self.logger.removeHandler(self.sh)
self.out = self.io.getvalue()
def __repr__(self):
return f"captured: {self.out}\n"
def enable_full_determinism():
"""
Helper function for reproducible behavior during distributed training. See
- https://pytorch.org/docs/stable/notes/randomness.html for pytorch
"""
# Enable PyTorch deterministic mode. This potentially requires either the environment
# variable 'CUDA_LAUNCH_BLOCKING' or 'CUBLAS_WORKSPACE_CONFIG' to be set,
# depending on the CUDA version, so we set them both here
os.environ["CUDA_LAUNCH_BLOCKING"] = "1"
os.environ["CUBLAS_WORKSPACE_CONFIG"] = ":16:8"
torch.use_deterministic_algorithms(True)
# Enable CUDNN deterministic mode
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
torch.backends.cuda.matmul.allow_tf32 = False
def disable_full_determinism():
os.environ["CUDA_LAUNCH_BLOCKING"] = "0"
os.environ["CUBLAS_WORKSPACE_CONFIG"] = ""
torch.use_deterministic_algorithms(False)
# Utils for custom and alternative accelerator devices
def _is_torch_fp16_available(device):
if not is_torch_available():
return False
import torch
device = torch.device(device)
try:
x = torch.zeros((2, 2), dtype=torch.float16).to(device)
_ = torch.mul(x, x)
return True
except Exception as e:
if device.type == "cuda":
raise ValueError(
f"You have passed a device of type 'cuda' which should work with 'fp16', but 'cuda' does not seem to be correctly installed on your machine: {e}"
)
return False
def _is_torch_fp64_available(device):
if not is_torch_available():
return False
import torch
device = torch.device(device)
try:
x = torch.zeros((2, 2), dtype=torch.float64).to(device)
_ = torch.mul(x, x)
return True
except Exception as e:
if device.type == "cuda":
raise ValueError(
f"You have passed a device of type 'cuda' which should work with 'fp64', but 'cuda' does not seem to be correctly installed on your machine: {e}"
)
return False
# Guard these lookups for when Torch is not used - alternative accelerator support is for PyTorch
if is_torch_available():
# Behaviour flags
BACKEND_SUPPORTS_TRAINING = {"cuda": True, "xpu": True, "cpu": True, "mps": False, "default": True}
# Function definitions
BACKEND_EMPTY_CACHE = {
"cuda": torch.cuda.empty_cache,
"xpu": torch.xpu.empty_cache,
"cpu": None,
"mps": torch.mps.empty_cache,
"default": None,
}
BACKEND_DEVICE_COUNT = {
"cuda": torch.cuda.device_count,
"xpu": torch.xpu.device_count,
"cpu": lambda: 0,
"mps": lambda: 0,
"default": 0,
}
BACKEND_MANUAL_SEED = {
"cuda": torch.cuda.manual_seed,
"xpu": torch.xpu.manual_seed,
"cpu": torch.manual_seed,
"mps": torch.mps.manual_seed,
"default": torch.manual_seed,
}
BACKEND_RESET_PEAK_MEMORY_STATS = {
"cuda": torch.cuda.reset_peak_memory_stats,
"xpu": getattr(torch.xpu, "reset_peak_memory_stats", None),
"cpu": None,
"mps": None,
"default": None,
}
BACKEND_RESET_MAX_MEMORY_ALLOCATED = {
"cuda": torch.cuda.reset_max_memory_allocated,
"xpu": None,
"cpu": None,
"mps": None,
"default": None,
}
BACKEND_MAX_MEMORY_ALLOCATED = {
"cuda": torch.cuda.max_memory_allocated,
"xpu": getattr(torch.xpu, "max_memory_allocated", None),
"cpu": 0,
"mps": 0,
"default": 0,
}
# This dispatches a defined function according to the accelerator from the function definitions.
def _device_agnostic_dispatch(device: str, dispatch_table: Dict[str, Callable], *args, **kwargs):
if device not in dispatch_table:
return dispatch_table["default"](*args, **kwargs)
fn = dispatch_table[device]
# Some device agnostic functions return values. Need to guard against 'None' instead at
# user level
if fn is None:
return None
return fn(*args, **kwargs)
# These are callables which automatically dispatch the function specific to the accelerator
def backend_manual_seed(device: str, seed: int):
return _device_agnostic_dispatch(device, BACKEND_MANUAL_SEED, seed)
def backend_empty_cache(device: str):
return _device_agnostic_dispatch(device, BACKEND_EMPTY_CACHE)
def backend_device_count(device: str):
return _device_agnostic_dispatch(device, BACKEND_DEVICE_COUNT)
def backend_reset_peak_memory_stats(device: str):
return _device_agnostic_dispatch(device, BACKEND_RESET_PEAK_MEMORY_STATS)
def backend_reset_max_memory_allocated(device: str):
return _device_agnostic_dispatch(device, BACKEND_RESET_MAX_MEMORY_ALLOCATED)
def backend_max_memory_allocated(device: str):
return _device_agnostic_dispatch(device, BACKEND_MAX_MEMORY_ALLOCATED)
# These are callables which return boolean behaviour flags and can be used to specify some
# device agnostic alternative where the feature is unsupported.
def backend_supports_training(device: str):
if not is_torch_available():
return False
if device not in BACKEND_SUPPORTS_TRAINING:
device = "default"
return BACKEND_SUPPORTS_TRAINING[device]
# Guard for when Torch is not available
if is_torch_available():
# Update device function dict mapping
def update_mapping_from_spec(device_fn_dict: Dict[str, Callable], attribute_name: str):
try:
# Try to import the function directly
spec_fn = getattr(device_spec_module, attribute_name)
device_fn_dict[torch_device] = spec_fn
except AttributeError as e:
# If the function doesn't exist, and there is no default, throw an error
if "default" not in device_fn_dict:
raise AttributeError(
f"`{attribute_name}` not found in '{device_spec_path}' and no default fallback function found."
) from e
if "DIFFUSERS_TEST_DEVICE_SPEC" in os.environ:
device_spec_path = os.environ["DIFFUSERS_TEST_DEVICE_SPEC"]
if not Path(device_spec_path).is_file():
raise ValueError(f"Specified path to device specification file is not found. Received {device_spec_path}")
try:
import_name = device_spec_path[: device_spec_path.index(".py")]
except ValueError as e:
raise ValueError(f"Provided device spec file is not a Python file! Received {device_spec_path}") from e
device_spec_module = importlib.import_module(import_name)
try:
device_name = device_spec_module.DEVICE_NAME
except AttributeError:
raise AttributeError("Device spec file did not contain `DEVICE_NAME`")
if "DIFFUSERS_TEST_DEVICE" in os.environ and torch_device != device_name:
msg = f"Mismatch between environment variable `DIFFUSERS_TEST_DEVICE` '{torch_device}' and device found in spec '{device_name}'\n"
msg += "Either unset `DIFFUSERS_TEST_DEVICE` or ensure it matches device spec name."
raise ValueError(msg)
torch_device = device_name
# Add one entry here for each `BACKEND_*` dictionary.
update_mapping_from_spec(BACKEND_MANUAL_SEED, "MANUAL_SEED_FN")
update_mapping_from_spec(BACKEND_EMPTY_CACHE, "EMPTY_CACHE_FN")
update_mapping_from_spec(BACKEND_DEVICE_COUNT, "DEVICE_COUNT_FN")
update_mapping_from_spec(BACKEND_SUPPORTS_TRAINING, "SUPPORTS_TRAINING")
update_mapping_from_spec(BACKEND_RESET_PEAK_MEMORY_STATS, "RESET_PEAK_MEMORY_STATS_FN")
update_mapping_from_spec(BACKEND_RESET_MAX_MEMORY_ALLOCATED, "RESET_MAX_MEMORY_ALLOCATED_FN")
update_mapping_from_spec(BACKEND_MAX_MEMORY_ALLOCATED, "MAX_MEMORY_ALLOCATED_FN")
| diffusers/src/diffusers/utils/testing_utils.py/0 | {
"file_path": "diffusers/src/diffusers/utils/testing_utils.py",
"repo_id": "diffusers",
"token_count": 17593
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import sys
import unittest
import torch
from transformers import Gemma2Model, GemmaTokenizer
from diffusers import AutoencoderDC, FlowMatchEulerDiscreteScheduler, SanaPipeline, SanaTransformer2DModel
from diffusers.utils.testing_utils import floats_tensor, require_peft_backend
sys.path.append(".")
from utils import PeftLoraLoaderMixinTests # noqa: E402
@require_peft_backend
class SanaLoRATests(unittest.TestCase, PeftLoraLoaderMixinTests):
pipeline_class = SanaPipeline
scheduler_cls = FlowMatchEulerDiscreteScheduler(shift=7.0)
scheduler_kwargs = {}
scheduler_classes = [FlowMatchEulerDiscreteScheduler]
transformer_kwargs = {
"patch_size": 1,
"in_channels": 4,
"out_channels": 4,
"num_layers": 1,
"num_attention_heads": 2,
"attention_head_dim": 4,
"num_cross_attention_heads": 2,
"cross_attention_head_dim": 4,
"cross_attention_dim": 8,
"caption_channels": 8,
"sample_size": 32,
}
transformer_cls = SanaTransformer2DModel
vae_kwargs = {
"in_channels": 3,
"latent_channels": 4,
"attention_head_dim": 2,
"encoder_block_types": (
"ResBlock",
"EfficientViTBlock",
),
"decoder_block_types": (
"ResBlock",
"EfficientViTBlock",
),
"encoder_block_out_channels": (8, 8),
"decoder_block_out_channels": (8, 8),
"encoder_qkv_multiscales": ((), (5,)),
"decoder_qkv_multiscales": ((), (5,)),
"encoder_layers_per_block": (1, 1),
"decoder_layers_per_block": [1, 1],
"downsample_block_type": "conv",
"upsample_block_type": "interpolate",
"decoder_norm_types": "rms_norm",
"decoder_act_fns": "silu",
"scaling_factor": 0.41407,
}
vae_cls = AutoencoderDC
tokenizer_cls, tokenizer_id = GemmaTokenizer, "hf-internal-testing/dummy-gemma"
text_encoder_cls, text_encoder_id = Gemma2Model, "hf-internal-testing/dummy-gemma-for-diffusers"
@property
def output_shape(self):
return (1, 32, 32, 3)
def get_dummy_inputs(self, with_generator=True):
batch_size = 1
sequence_length = 16
num_channels = 4
sizes = (32, 32)
generator = torch.manual_seed(0)
noise = floats_tensor((batch_size, num_channels) + sizes)
input_ids = torch.randint(1, sequence_length, size=(batch_size, sequence_length), generator=generator)
pipeline_inputs = {
"prompt": "",
"negative_prompt": "",
"num_inference_steps": 4,
"guidance_scale": 4.5,
"height": 32,
"width": 32,
"max_sequence_length": sequence_length,
"output_type": "np",
"complex_human_instruction": None,
}
if with_generator:
pipeline_inputs.update({"generator": generator})
return noise, input_ids, pipeline_inputs
@unittest.skip("Not supported in SANA.")
def test_modify_padding_mode(self):
pass
@unittest.skip("Not supported in SANA.")
def test_simple_inference_with_text_denoiser_block_scale(self):
pass
@unittest.skip("Not supported in SANA.")
def test_simple_inference_with_text_denoiser_block_scale_for_all_dict_options(self):
pass
@unittest.skip("Text encoder LoRA is not supported in SANA.")
def test_simple_inference_with_partial_text_lora(self):
pass
@unittest.skip("Text encoder LoRA is not supported in SANA.")
def test_simple_inference_with_text_lora(self):
pass
@unittest.skip("Text encoder LoRA is not supported in SANA.")
def test_simple_inference_with_text_lora_and_scale(self):
pass
@unittest.skip("Text encoder LoRA is not supported in SANA.")
def test_simple_inference_with_text_lora_fused(self):
pass
@unittest.skip("Text encoder LoRA is not supported in SANA.")
def test_simple_inference_with_text_lora_save_load(self):
pass
| diffusers/tests/lora/test_lora_layers_sana.py/0 | {
"file_path": "diffusers/tests/lora/test_lora_layers_sana.py",
"repo_id": "diffusers",
"token_count": 2016
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import unittest
import numpy as np
import torch
from diffusers import ConsistencyDecoderVAE, StableDiffusionPipeline
from diffusers.utils.testing_utils import (
enable_full_determinism,
load_image,
slow,
torch_all_close,
torch_device,
)
from diffusers.utils.torch_utils import randn_tensor
from ..test_modeling_common import ModelTesterMixin
enable_full_determinism()
class ConsistencyDecoderVAETests(ModelTesterMixin, unittest.TestCase):
model_class = ConsistencyDecoderVAE
main_input_name = "sample"
base_precision = 1e-2
forward_requires_fresh_args = True
def get_consistency_vae_config(self, block_out_channels=None, norm_num_groups=None):
block_out_channels = block_out_channels or [2, 4]
norm_num_groups = norm_num_groups or 2
return {
"encoder_block_out_channels": block_out_channels,
"encoder_in_channels": 3,
"encoder_out_channels": 4,
"encoder_down_block_types": ["DownEncoderBlock2D"] * len(block_out_channels),
"decoder_add_attention": False,
"decoder_block_out_channels": block_out_channels,
"decoder_down_block_types": ["ResnetDownsampleBlock2D"] * len(block_out_channels),
"decoder_downsample_padding": 1,
"decoder_in_channels": 7,
"decoder_layers_per_block": 1,
"decoder_norm_eps": 1e-05,
"decoder_norm_num_groups": norm_num_groups,
"encoder_norm_num_groups": norm_num_groups,
"decoder_num_train_timesteps": 1024,
"decoder_out_channels": 6,
"decoder_resnet_time_scale_shift": "scale_shift",
"decoder_time_embedding_type": "learned",
"decoder_up_block_types": ["ResnetUpsampleBlock2D"] * len(block_out_channels),
"scaling_factor": 1,
"latent_channels": 4,
}
def inputs_dict(self, seed=None):
if seed is None:
generator = torch.Generator("cpu").manual_seed(0)
else:
generator = torch.Generator("cpu").manual_seed(seed)
image = randn_tensor((4, 3, 32, 32), generator=generator, device=torch.device(torch_device))
return {"sample": image, "generator": generator}
@property
def input_shape(self):
return (3, 32, 32)
@property
def output_shape(self):
return (3, 32, 32)
@property
def init_dict(self):
return self.get_consistency_vae_config()
def prepare_init_args_and_inputs_for_common(self):
return self.init_dict, self.inputs_dict()
def test_enable_disable_tiling(self):
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
torch.manual_seed(0)
model = self.model_class(**init_dict).to(torch_device)
inputs_dict.update({"return_dict": False})
_ = inputs_dict.pop("generator")
torch.manual_seed(0)
output_without_tiling = model(**inputs_dict, generator=torch.manual_seed(0))[0]
torch.manual_seed(0)
model.enable_tiling()
output_with_tiling = model(**inputs_dict, generator=torch.manual_seed(0))[0]
self.assertLess(
(output_without_tiling.detach().cpu().numpy() - output_with_tiling.detach().cpu().numpy()).max(),
0.5,
"VAE tiling should not affect the inference results",
)
torch.manual_seed(0)
model.disable_tiling()
output_without_tiling_2 = model(**inputs_dict, generator=torch.manual_seed(0))[0]
self.assertEqual(
output_without_tiling.detach().cpu().numpy().all(),
output_without_tiling_2.detach().cpu().numpy().all(),
"Without tiling outputs should match with the outputs when tiling is manually disabled.",
)
def test_enable_disable_slicing(self):
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
torch.manual_seed(0)
model = self.model_class(**init_dict).to(torch_device)
inputs_dict.update({"return_dict": False})
_ = inputs_dict.pop("generator")
torch.manual_seed(0)
output_without_slicing = model(**inputs_dict, generator=torch.manual_seed(0))[0]
torch.manual_seed(0)
model.enable_slicing()
output_with_slicing = model(**inputs_dict, generator=torch.manual_seed(0))[0]
self.assertLess(
(output_without_slicing.detach().cpu().numpy() - output_with_slicing.detach().cpu().numpy()).max(),
0.5,
"VAE slicing should not affect the inference results",
)
torch.manual_seed(0)
model.disable_slicing()
output_without_slicing_2 = model(**inputs_dict, generator=torch.manual_seed(0))[0]
self.assertEqual(
output_without_slicing.detach().cpu().numpy().all(),
output_without_slicing_2.detach().cpu().numpy().all(),
"Without slicing outputs should match with the outputs when slicing is manually disabled.",
)
@slow
class ConsistencyDecoderVAEIntegrationTests(unittest.TestCase):
def setUp(self):
# clean up the VRAM before each test
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
# clean up the VRAM after each test
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
@torch.no_grad()
def test_encode_decode(self):
vae = ConsistencyDecoderVAE.from_pretrained("openai/consistency-decoder") # TODO - update
vae.to(torch_device)
image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/img2img/sketch-mountains-input.jpg"
).resize((256, 256))
image = torch.from_numpy(np.array(image).transpose(2, 0, 1).astype(np.float32) / 127.5 - 1)[None, :, :, :].to(
torch_device
)
latent = vae.encode(image).latent_dist.mean
sample = vae.decode(latent, generator=torch.Generator("cpu").manual_seed(0)).sample
actual_output = sample[0, :2, :2, :2].flatten().cpu()
expected_output = torch.tensor([-0.0141, -0.0014, 0.0115, 0.0086, 0.1051, 0.1053, 0.1031, 0.1024])
assert torch_all_close(actual_output, expected_output, atol=5e-3)
def test_sd(self):
vae = ConsistencyDecoderVAE.from_pretrained("openai/consistency-decoder") # TODO - update
pipe = StableDiffusionPipeline.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5", vae=vae, safety_checker=None
)
pipe.to(torch_device)
out = pipe(
"horse",
num_inference_steps=2,
output_type="pt",
generator=torch.Generator("cpu").manual_seed(0),
).images[0]
actual_output = out[:2, :2, :2].flatten().cpu()
expected_output = torch.tensor([0.7686, 0.8228, 0.6489, 0.7455, 0.8661, 0.8797, 0.8241, 0.8759])
assert torch_all_close(actual_output, expected_output, atol=5e-3)
def test_encode_decode_f16(self):
vae = ConsistencyDecoderVAE.from_pretrained(
"openai/consistency-decoder", torch_dtype=torch.float16
) # TODO - update
vae.to(torch_device)
image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/img2img/sketch-mountains-input.jpg"
).resize((256, 256))
image = (
torch.from_numpy(np.array(image).transpose(2, 0, 1).astype(np.float32) / 127.5 - 1)[None, :, :, :]
.half()
.to(torch_device)
)
latent = vae.encode(image).latent_dist.mean
sample = vae.decode(latent, generator=torch.Generator("cpu").manual_seed(0)).sample
actual_output = sample[0, :2, :2, :2].flatten().cpu()
expected_output = torch.tensor(
[-0.0111, -0.0125, -0.0017, -0.0007, 0.1257, 0.1465, 0.1450, 0.1471],
dtype=torch.float16,
)
assert torch_all_close(actual_output, expected_output, atol=5e-3)
def test_sd_f16(self):
vae = ConsistencyDecoderVAE.from_pretrained(
"openai/consistency-decoder", torch_dtype=torch.float16
) # TODO - update
pipe = StableDiffusionPipeline.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5",
torch_dtype=torch.float16,
vae=vae,
safety_checker=None,
)
pipe.to(torch_device)
out = pipe(
"horse",
num_inference_steps=2,
output_type="pt",
generator=torch.Generator("cpu").manual_seed(0),
).images[0]
actual_output = out[:2, :2, :2].flatten().cpu()
expected_output = torch.tensor(
[0.0000, 0.0249, 0.0000, 0.0000, 0.1709, 0.2773, 0.0471, 0.1035],
dtype=torch.float16,
)
assert torch_all_close(actual_output, expected_output, atol=5e-3)
def test_vae_tiling(self):
vae = ConsistencyDecoderVAE.from_pretrained("openai/consistency-decoder", torch_dtype=torch.float16)
pipe = StableDiffusionPipeline.from_pretrained(
"stable-diffusion-v1-5/stable-diffusion-v1-5", vae=vae, safety_checker=None, torch_dtype=torch.float16
)
pipe.to(torch_device)
pipe.set_progress_bar_config(disable=None)
out_1 = pipe(
"horse",
num_inference_steps=2,
output_type="pt",
generator=torch.Generator("cpu").manual_seed(0),
).images[0]
# make sure tiled vae decode yields the same result
pipe.enable_vae_tiling()
out_2 = pipe(
"horse",
num_inference_steps=2,
output_type="pt",
generator=torch.Generator("cpu").manual_seed(0),
).images[0]
assert torch_all_close(out_1, out_2, atol=5e-3)
# test that tiled decode works with various shapes
shapes = [(1, 4, 73, 97), (1, 4, 97, 73), (1, 4, 49, 65), (1, 4, 65, 49)]
with torch.no_grad():
for shape in shapes:
image = torch.zeros(shape, device=torch_device, dtype=pipe.vae.dtype)
pipe.vae.decode(image)
| diffusers/tests/models/autoencoders/test_models_consistency_decoder_vae.py/0 | {
"file_path": "diffusers/tests/models/autoencoders/test_models_consistency_decoder_vae.py",
"repo_id": "diffusers",
"token_count": 5101
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import unittest
import torch
from diffusers import CogView3PlusTransformer2DModel
from diffusers.utils.testing_utils import (
enable_full_determinism,
torch_device,
)
from ..test_modeling_common import ModelTesterMixin
enable_full_determinism()
class CogView3PlusTransformerTests(ModelTesterMixin, unittest.TestCase):
model_class = CogView3PlusTransformer2DModel
main_input_name = "hidden_states"
uses_custom_attn_processor = True
model_split_percents = [0.7, 0.6, 0.6]
@property
def dummy_input(self):
batch_size = 2
num_channels = 4
height = 8
width = 8
embedding_dim = 8
sequence_length = 8
hidden_states = torch.randn((batch_size, num_channels, height, width)).to(torch_device)
encoder_hidden_states = torch.randn((batch_size, sequence_length, embedding_dim)).to(torch_device)
original_size = torch.tensor([height * 8, width * 8]).unsqueeze(0).repeat(batch_size, 1).to(torch_device)
target_size = torch.tensor([height * 8, width * 8]).unsqueeze(0).repeat(batch_size, 1).to(torch_device)
crop_coords = torch.tensor([0, 0]).unsqueeze(0).repeat(batch_size, 1).to(torch_device)
timestep = torch.randint(0, 1000, size=(batch_size,)).to(torch_device)
return {
"hidden_states": hidden_states,
"encoder_hidden_states": encoder_hidden_states,
"original_size": original_size,
"target_size": target_size,
"crop_coords": crop_coords,
"timestep": timestep,
}
@property
def input_shape(self):
return (1, 4, 8, 8)
@property
def output_shape(self):
return (1, 4, 8, 8)
def prepare_init_args_and_inputs_for_common(self):
init_dict = {
"patch_size": 2,
"in_channels": 4,
"num_layers": 2,
"attention_head_dim": 4,
"num_attention_heads": 2,
"out_channels": 4,
"text_embed_dim": 8,
"time_embed_dim": 8,
"condition_dim": 2,
"pos_embed_max_size": 8,
"sample_size": 8,
}
inputs_dict = self.dummy_input
return init_dict, inputs_dict
def test_gradient_checkpointing_is_applied(self):
expected_set = {"CogView3PlusTransformer2DModel"}
super().test_gradient_checkpointing_is_applied(expected_set=expected_set)
| diffusers/tests/models/transformers/test_models_transformer_cogview3plus.py/0 | {
"file_path": "diffusers/tests/models/transformers/test_models_transformer_cogview3plus.py",
"repo_id": "diffusers",
"token_count": 1287
} |
import gc
import unittest
from parameterized import parameterized
from diffusers import FlaxUNet2DConditionModel
from diffusers.utils import is_flax_available
from diffusers.utils.testing_utils import load_hf_numpy, require_flax, slow
if is_flax_available():
import jax
import jax.numpy as jnp
@slow
@require_flax
class FlaxUNet2DConditionModelIntegrationTests(unittest.TestCase):
def get_file_format(self, seed, shape):
return f"gaussian_noise_s={seed}_shape={'_'.join([str(s) for s in shape])}.npy"
def tearDown(self):
# clean up the VRAM after each test
super().tearDown()
gc.collect()
def get_latents(self, seed=0, shape=(4, 4, 64, 64), fp16=False):
dtype = jnp.bfloat16 if fp16 else jnp.float32
image = jnp.array(load_hf_numpy(self.get_file_format(seed, shape)), dtype=dtype)
return image
def get_unet_model(self, fp16=False, model_id="CompVis/stable-diffusion-v1-4"):
dtype = jnp.bfloat16 if fp16 else jnp.float32
revision = "bf16" if fp16 else None
model, params = FlaxUNet2DConditionModel.from_pretrained(
model_id, subfolder="unet", dtype=dtype, revision=revision
)
return model, params
def get_encoder_hidden_states(self, seed=0, shape=(4, 77, 768), fp16=False):
dtype = jnp.bfloat16 if fp16 else jnp.float32
hidden_states = jnp.array(load_hf_numpy(self.get_file_format(seed, shape)), dtype=dtype)
return hidden_states
@parameterized.expand(
[
# fmt: off
[83, 4, [-0.2323, -0.1304, 0.0813, -0.3093, -0.0919, -0.1571, -0.1125, -0.5806]],
[17, 0.55, [-0.0831, -0.2443, 0.0901, -0.0919, 0.3396, 0.0103, -0.3743, 0.0701]],
[8, 0.89, [-0.4863, 0.0859, 0.0875, -0.1658, 0.9199, -0.0114, 0.4839, 0.4639]],
[3, 1000, [-0.5649, 0.2402, -0.5518, 0.1248, 1.1328, -0.2443, -0.0325, -1.0078]],
# fmt: on
]
)
def test_compvis_sd_v1_4_flax_vs_torch_fp16(self, seed, timestep, expected_slice):
model, params = self.get_unet_model(model_id="CompVis/stable-diffusion-v1-4", fp16=True)
latents = self.get_latents(seed, fp16=True)
encoder_hidden_states = self.get_encoder_hidden_states(seed, fp16=True)
sample = model.apply(
{"params": params},
latents,
jnp.array(timestep, dtype=jnp.int32),
encoder_hidden_states=encoder_hidden_states,
).sample
assert sample.shape == latents.shape
output_slice = jnp.asarray(jax.device_get((sample[-1, -2:, -2:, :2].flatten())), dtype=jnp.float32)
expected_output_slice = jnp.array(expected_slice, dtype=jnp.float32)
# Found torch (float16) and flax (bfloat16) outputs to be within this tolerance, in the same hardware
assert jnp.allclose(output_slice, expected_output_slice, atol=1e-2)
@parameterized.expand(
[
# fmt: off
[83, 4, [0.1514, 0.0807, 0.1624, 0.1016, -0.1896, 0.0263, 0.0677, 0.2310]],
[17, 0.55, [0.1164, -0.0216, 0.0170, 0.1589, -0.3120, 0.1005, -0.0581, -0.1458]],
[8, 0.89, [-0.1758, -0.0169, 0.1004, -0.1411, 0.1312, 0.1103, -0.1996, 0.2139]],
[3, 1000, [0.1214, 0.0352, -0.0731, -0.1562, -0.0994, -0.0906, -0.2340, -0.0539]],
# fmt: on
]
)
def test_stabilityai_sd_v2_flax_vs_torch_fp16(self, seed, timestep, expected_slice):
model, params = self.get_unet_model(model_id="stabilityai/stable-diffusion-2", fp16=True)
latents = self.get_latents(seed, shape=(4, 4, 96, 96), fp16=True)
encoder_hidden_states = self.get_encoder_hidden_states(seed, shape=(4, 77, 1024), fp16=True)
sample = model.apply(
{"params": params},
latents,
jnp.array(timestep, dtype=jnp.int32),
encoder_hidden_states=encoder_hidden_states,
).sample
assert sample.shape == latents.shape
output_slice = jnp.asarray(jax.device_get((sample[-1, -2:, -2:, :2].flatten())), dtype=jnp.float32)
expected_output_slice = jnp.array(expected_slice, dtype=jnp.float32)
# Found torch (float16) and flax (bfloat16) outputs to be within this tolerance, on the same hardware
assert jnp.allclose(output_slice, expected_output_slice, atol=1e-2)
| diffusers/tests/models/unets/test_models_unet_2d_flax.py/0 | {
"file_path": "diffusers/tests/models/unets/test_models_unet_2d_flax.py",
"repo_id": "diffusers",
"token_count": 2141
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
import unittest
import pytest
from diffusers import __version__
from diffusers.utils import deprecate
from diffusers.utils.testing_utils import str_to_bool
# Used to test the hub
USER = "__DUMMY_TRANSFORMERS_USER__"
ENDPOINT_STAGING = "https://hub-ci.huggingface.co"
# Not critical, only usable on the sandboxed CI instance.
TOKEN = "hf_94wBhPGp6KrrTH3KDchhKpRxZwd6dmHWLL"
class DeprecateTester(unittest.TestCase):
higher_version = ".".join([str(int(__version__.split(".")[0]) + 1)] + __version__.split(".")[1:])
lower_version = "0.0.1"
def test_deprecate_function_arg(self):
kwargs = {"deprecated_arg": 4}
with self.assertWarns(FutureWarning) as warning:
output = deprecate("deprecated_arg", self.higher_version, "message", take_from=kwargs)
assert output == 4
assert (
str(warning.warning)
== f"The `deprecated_arg` argument is deprecated and will be removed in version {self.higher_version}."
" message"
)
def test_deprecate_function_arg_tuple(self):
kwargs = {"deprecated_arg": 4}
with self.assertWarns(FutureWarning) as warning:
output = deprecate(("deprecated_arg", self.higher_version, "message"), take_from=kwargs)
assert output == 4
assert (
str(warning.warning)
== f"The `deprecated_arg` argument is deprecated and will be removed in version {self.higher_version}."
" message"
)
def test_deprecate_function_args(self):
kwargs = {"deprecated_arg_1": 4, "deprecated_arg_2": 8}
with self.assertWarns(FutureWarning) as warning:
output_1, output_2 = deprecate(
("deprecated_arg_1", self.higher_version, "Hey"),
("deprecated_arg_2", self.higher_version, "Hey"),
take_from=kwargs,
)
assert output_1 == 4
assert output_2 == 8
assert (
str(warning.warnings[0].message)
== "The `deprecated_arg_1` argument is deprecated and will be removed in version"
f" {self.higher_version}. Hey"
)
assert (
str(warning.warnings[1].message)
== "The `deprecated_arg_2` argument is deprecated and will be removed in version"
f" {self.higher_version}. Hey"
)
def test_deprecate_function_incorrect_arg(self):
kwargs = {"deprecated_arg": 4}
with self.assertRaises(TypeError) as error:
deprecate(("wrong_arg", self.higher_version, "message"), take_from=kwargs)
assert "test_deprecate_function_incorrect_arg in" in str(error.exception)
assert "line" in str(error.exception)
assert "got an unexpected keyword argument `deprecated_arg`" in str(error.exception)
def test_deprecate_arg_no_kwarg(self):
with self.assertWarns(FutureWarning) as warning:
deprecate(("deprecated_arg", self.higher_version, "message"))
assert (
str(warning.warning)
== f"`deprecated_arg` is deprecated and will be removed in version {self.higher_version}. message"
)
def test_deprecate_args_no_kwarg(self):
with self.assertWarns(FutureWarning) as warning:
deprecate(
("deprecated_arg_1", self.higher_version, "Hey"),
("deprecated_arg_2", self.higher_version, "Hey"),
)
assert (
str(warning.warnings[0].message)
== f"`deprecated_arg_1` is deprecated and will be removed in version {self.higher_version}. Hey"
)
assert (
str(warning.warnings[1].message)
== f"`deprecated_arg_2` is deprecated and will be removed in version {self.higher_version}. Hey"
)
def test_deprecate_class_obj(self):
class Args:
arg = 5
with self.assertWarns(FutureWarning) as warning:
arg = deprecate(("arg", self.higher_version, "message"), take_from=Args())
assert arg == 5
assert (
str(warning.warning)
== f"The `arg` attribute is deprecated and will be removed in version {self.higher_version}. message"
)
def test_deprecate_class_objs(self):
class Args:
arg = 5
foo = 7
with self.assertWarns(FutureWarning) as warning:
arg_1, arg_2 = deprecate(
("arg", self.higher_version, "message"),
("foo", self.higher_version, "message"),
("does not exist", self.higher_version, "message"),
take_from=Args(),
)
assert arg_1 == 5
assert arg_2 == 7
assert (
str(warning.warning)
== f"The `arg` attribute is deprecated and will be removed in version {self.higher_version}. message"
)
assert (
str(warning.warnings[0].message)
== f"The `arg` attribute is deprecated and will be removed in version {self.higher_version}. message"
)
assert (
str(warning.warnings[1].message)
== f"The `foo` attribute is deprecated and will be removed in version {self.higher_version}. message"
)
def test_deprecate_incorrect_version(self):
kwargs = {"deprecated_arg": 4}
with self.assertRaises(ValueError) as error:
deprecate(("wrong_arg", self.lower_version, "message"), take_from=kwargs)
assert (
str(error.exception)
== "The deprecation tuple ('wrong_arg', '0.0.1', 'message') should be removed since diffusers' version"
f" {__version__} is >= {self.lower_version}"
)
def test_deprecate_incorrect_no_standard_warn(self):
with self.assertWarns(FutureWarning) as warning:
deprecate(("deprecated_arg", self.higher_version, "This message is better!!!"), standard_warn=False)
assert str(warning.warning) == "This message is better!!!"
def test_deprecate_stacklevel(self):
with self.assertWarns(FutureWarning) as warning:
deprecate(("deprecated_arg", self.higher_version, "This message is better!!!"), standard_warn=False)
assert str(warning.warning) == "This message is better!!!"
assert "diffusers/tests/others/test_utils.py" in warning.filename
def parse_flag_from_env(key, default=False):
try:
value = os.environ[key]
except KeyError:
# KEY isn't set, default to `default`.
_value = default
else:
# KEY is set, convert it to True or False.
try:
_value = str_to_bool(value)
except ValueError:
# More values are supported, but let's keep the message simple.
raise ValueError(f"If set, {key} must be yes or no.")
return _value
_run_staging = parse_flag_from_env("HUGGINGFACE_CO_STAGING", default=False)
def is_staging_test(test_case):
"""
Decorator marking a test as a staging test.
Those tests will run using the staging environment of huggingface.co instead of the real model hub.
"""
if not _run_staging:
return unittest.skip("test is staging test")(test_case)
else:
return pytest.mark.is_staging_test()(test_case)
| diffusers/tests/others/test_utils.py/0 | {
"file_path": "diffusers/tests/others/test_utils.py",
"repo_id": "diffusers",
"token_count": 3332
} |
# Copyright 2024 The HuggingFace Team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import inspect
import unittest
import numpy as np
import torch
from PIL import Image
from transformers import AutoTokenizer, T5EncoderModel
from diffusers import AutoencoderKLCogVideoX, ConsisIDPipeline, ConsisIDTransformer3DModel, DDIMScheduler
from diffusers.utils import load_image
from diffusers.utils.testing_utils import (
enable_full_determinism,
numpy_cosine_similarity_distance,
require_torch_gpu,
slow,
torch_device,
)
from ..pipeline_params import TEXT_TO_IMAGE_BATCH_PARAMS, TEXT_TO_IMAGE_IMAGE_PARAMS, TEXT_TO_IMAGE_PARAMS
from ..test_pipelines_common import (
PipelineTesterMixin,
to_np,
)
enable_full_determinism()
class ConsisIDPipelineFastTests(PipelineTesterMixin, unittest.TestCase):
pipeline_class = ConsisIDPipeline
params = TEXT_TO_IMAGE_PARAMS - {"cross_attention_kwargs"}
batch_params = TEXT_TO_IMAGE_BATCH_PARAMS.union({"image"})
image_params = TEXT_TO_IMAGE_IMAGE_PARAMS
image_latents_params = TEXT_TO_IMAGE_IMAGE_PARAMS
required_optional_params = frozenset(
[
"num_inference_steps",
"generator",
"latents",
"return_dict",
"callback_on_step_end",
"callback_on_step_end_tensor_inputs",
]
)
test_xformers_attention = False
test_layerwise_casting = True
def get_dummy_components(self):
torch.manual_seed(0)
transformer = ConsisIDTransformer3DModel(
num_attention_heads=2,
attention_head_dim=16,
in_channels=8,
out_channels=4,
time_embed_dim=2,
text_embed_dim=32,
num_layers=1,
sample_width=2,
sample_height=2,
sample_frames=9,
patch_size=2,
temporal_compression_ratio=4,
max_text_seq_length=16,
use_rotary_positional_embeddings=True,
use_learned_positional_embeddings=True,
cross_attn_interval=1,
is_kps=False,
is_train_face=True,
cross_attn_dim_head=1,
cross_attn_num_heads=1,
LFE_id_dim=2,
LFE_vit_dim=2,
LFE_depth=5,
LFE_dim_head=8,
LFE_num_heads=2,
LFE_num_id_token=1,
LFE_num_querie=1,
LFE_output_dim=21,
LFE_ff_mult=1,
LFE_num_scale=1,
)
torch.manual_seed(0)
vae = AutoencoderKLCogVideoX(
in_channels=3,
out_channels=3,
down_block_types=(
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
"CogVideoXDownBlock3D",
),
up_block_types=(
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
"CogVideoXUpBlock3D",
),
block_out_channels=(8, 8, 8, 8),
latent_channels=4,
layers_per_block=1,
norm_num_groups=2,
temporal_compression_ratio=4,
)
torch.manual_seed(0)
scheduler = DDIMScheduler()
text_encoder = T5EncoderModel.from_pretrained("hf-internal-testing/tiny-random-t5")
tokenizer = AutoTokenizer.from_pretrained("hf-internal-testing/tiny-random-t5")
components = {
"transformer": transformer,
"vae": vae,
"scheduler": scheduler,
"text_encoder": text_encoder,
"tokenizer": tokenizer,
}
return components
def get_dummy_inputs(self, device, seed=0):
if str(device).startswith("mps"):
generator = torch.manual_seed(seed)
else:
generator = torch.Generator(device=device).manual_seed(seed)
image_height = 16
image_width = 16
image = Image.new("RGB", (image_width, image_height))
id_vit_hidden = [torch.ones([1, 2, 2])] * 1
id_cond = torch.ones(1, 2)
inputs = {
"image": image,
"prompt": "dance monkey",
"negative_prompt": "",
"generator": generator,
"num_inference_steps": 2,
"guidance_scale": 6.0,
"height": image_height,
"width": image_width,
"num_frames": 8,
"max_sequence_length": 16,
"id_vit_hidden": id_vit_hidden,
"id_cond": id_cond,
"output_type": "pt",
}
return inputs
def test_inference(self):
device = "cpu"
components = self.get_dummy_components()
pipe = self.pipeline_class(**components)
pipe.to(device)
pipe.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
video = pipe(**inputs).frames
generated_video = video[0]
self.assertEqual(generated_video.shape, (8, 3, 16, 16))
expected_video = torch.randn(8, 3, 16, 16)
max_diff = np.abs(generated_video - expected_video).max()
self.assertLessEqual(max_diff, 1e10)
def test_callback_inputs(self):
sig = inspect.signature(self.pipeline_class.__call__)
has_callback_tensor_inputs = "callback_on_step_end_tensor_inputs" in sig.parameters
has_callback_step_end = "callback_on_step_end" in sig.parameters
if not (has_callback_tensor_inputs and has_callback_step_end):
return
components = self.get_dummy_components()
pipe = self.pipeline_class(**components)
pipe = pipe.to(torch_device)
pipe.set_progress_bar_config(disable=None)
self.assertTrue(
hasattr(pipe, "_callback_tensor_inputs"),
f" {self.pipeline_class} should have `_callback_tensor_inputs` that defines a list of tensor variables its callback function can use as inputs",
)
def callback_inputs_subset(pipe, i, t, callback_kwargs):
# iterate over callback args
for tensor_name, tensor_value in callback_kwargs.items():
# check that we're only passing in allowed tensor inputs
assert tensor_name in pipe._callback_tensor_inputs
return callback_kwargs
def callback_inputs_all(pipe, i, t, callback_kwargs):
for tensor_name in pipe._callback_tensor_inputs:
assert tensor_name in callback_kwargs
# iterate over callback args
for tensor_name, tensor_value in callback_kwargs.items():
# check that we're only passing in allowed tensor inputs
assert tensor_name in pipe._callback_tensor_inputs
return callback_kwargs
inputs = self.get_dummy_inputs(torch_device)
# Test passing in a subset
inputs["callback_on_step_end"] = callback_inputs_subset
inputs["callback_on_step_end_tensor_inputs"] = ["latents"]
output = pipe(**inputs)[0]
# Test passing in a everything
inputs["callback_on_step_end"] = callback_inputs_all
inputs["callback_on_step_end_tensor_inputs"] = pipe._callback_tensor_inputs
output = pipe(**inputs)[0]
def callback_inputs_change_tensor(pipe, i, t, callback_kwargs):
is_last = i == (pipe.num_timesteps - 1)
if is_last:
callback_kwargs["latents"] = torch.zeros_like(callback_kwargs["latents"])
return callback_kwargs
inputs["callback_on_step_end"] = callback_inputs_change_tensor
inputs["callback_on_step_end_tensor_inputs"] = pipe._callback_tensor_inputs
output = pipe(**inputs)[0]
assert output.abs().sum() < 1e10
def test_inference_batch_single_identical(self):
self._test_inference_batch_single_identical(batch_size=3, expected_max_diff=1e-3)
def test_attention_slicing_forward_pass(
self, test_max_difference=True, test_mean_pixel_difference=True, expected_max_diff=1e-3
):
if not self.test_attention_slicing:
return
components = self.get_dummy_components()
pipe = self.pipeline_class(**components)
for component in pipe.components.values():
if hasattr(component, "set_default_attn_processor"):
component.set_default_attn_processor()
pipe.to(torch_device)
pipe.set_progress_bar_config(disable=None)
generator_device = "cpu"
inputs = self.get_dummy_inputs(generator_device)
output_without_slicing = pipe(**inputs)[0]
pipe.enable_attention_slicing(slice_size=1)
inputs = self.get_dummy_inputs(generator_device)
output_with_slicing1 = pipe(**inputs)[0]
pipe.enable_attention_slicing(slice_size=2)
inputs = self.get_dummy_inputs(generator_device)
output_with_slicing2 = pipe(**inputs)[0]
if test_max_difference:
max_diff1 = np.abs(to_np(output_with_slicing1) - to_np(output_without_slicing)).max()
max_diff2 = np.abs(to_np(output_with_slicing2) - to_np(output_without_slicing)).max()
self.assertLess(
max(max_diff1, max_diff2),
expected_max_diff,
"Attention slicing should not affect the inference results",
)
def test_vae_tiling(self, expected_diff_max: float = 0.4):
generator_device = "cpu"
components = self.get_dummy_components()
# The reason to modify it this way is because ConsisID Transformer limits the generation to resolutions used during initalization.
# This limitation comes from using learned positional embeddings which cannot be generated on-the-fly like sincos or RoPE embeddings.
# See the if-statement on "self.use_learned_positional_embeddings" in diffusers/models/embeddings.py
components["transformer"] = ConsisIDTransformer3DModel.from_config(
components["transformer"].config,
sample_height=16,
sample_width=16,
)
pipe = self.pipeline_class(**components)
pipe.to("cpu")
pipe.set_progress_bar_config(disable=None)
# Without tiling
inputs = self.get_dummy_inputs(generator_device)
inputs["height"] = inputs["width"] = 128
output_without_tiling = pipe(**inputs)[0]
# With tiling
pipe.vae.enable_tiling(
tile_sample_min_height=96,
tile_sample_min_width=96,
tile_overlap_factor_height=1 / 12,
tile_overlap_factor_width=1 / 12,
)
inputs = self.get_dummy_inputs(generator_device)
inputs["height"] = inputs["width"] = 128
output_with_tiling = pipe(**inputs)[0]
self.assertLess(
(to_np(output_without_tiling) - to_np(output_with_tiling)).max(),
expected_diff_max,
"VAE tiling should not affect the inference results",
)
@slow
@require_torch_gpu
class ConsisIDPipelineIntegrationTests(unittest.TestCase):
prompt = "A painting of a squirrel eating a burger."
def setUp(self):
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def test_consisid(self):
generator = torch.Generator("cpu").manual_seed(0)
pipe = ConsisIDPipeline.from_pretrained("BestWishYsh/ConsisID-preview", torch_dtype=torch.bfloat16)
pipe.enable_model_cpu_offload()
prompt = self.prompt
image = load_image("https://github.com/PKU-YuanGroup/ConsisID/blob/main/asserts/example_images/2.png?raw=true")
id_vit_hidden = [torch.ones([1, 2, 2])] * 1
id_cond = torch.ones(1, 2)
videos = pipe(
image=image,
prompt=prompt,
height=480,
width=720,
num_frames=16,
id_vit_hidden=id_vit_hidden,
id_cond=id_cond,
generator=generator,
num_inference_steps=1,
output_type="pt",
).frames
video = videos[0]
expected_video = torch.randn(1, 16, 480, 720, 3).numpy()
max_diff = numpy_cosine_similarity_distance(video, expected_video)
assert max_diff < 1e-3, f"Max diff is too high. got {video}"
| diffusers/tests/pipelines/consisid/test_consisid.py/0 | {
"file_path": "diffusers/tests/pipelines/consisid/test_consisid.py",
"repo_id": "diffusers",
"token_count": 6117
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import unittest
import numpy as np
import torch
from transformers import CLIPTextConfig, CLIPTextModel, CLIPTokenizer
from diffusers import AutoencoderKL, DDIMScheduler, LDMTextToImagePipeline, UNet2DConditionModel
from diffusers.utils.testing_utils import (
enable_full_determinism,
load_numpy,
nightly,
require_torch_gpu,
torch_device,
)
from ..pipeline_params import TEXT_TO_IMAGE_BATCH_PARAMS, TEXT_TO_IMAGE_PARAMS
from ..test_pipelines_common import PipelineTesterMixin
enable_full_determinism()
class LDMTextToImagePipelineFastTests(PipelineTesterMixin, unittest.TestCase):
pipeline_class = LDMTextToImagePipeline
params = TEXT_TO_IMAGE_PARAMS - {
"negative_prompt",
"negative_prompt_embeds",
"cross_attention_kwargs",
"prompt_embeds",
}
required_optional_params = PipelineTesterMixin.required_optional_params - {
"num_images_per_prompt",
"callback",
"callback_steps",
}
batch_params = TEXT_TO_IMAGE_BATCH_PARAMS
def get_dummy_components(self):
torch.manual_seed(0)
unet = UNet2DConditionModel(
block_out_channels=(32, 64),
layers_per_block=2,
sample_size=32,
in_channels=4,
out_channels=4,
down_block_types=("DownBlock2D", "CrossAttnDownBlock2D"),
up_block_types=("CrossAttnUpBlock2D", "UpBlock2D"),
cross_attention_dim=32,
)
scheduler = DDIMScheduler(
beta_start=0.00085,
beta_end=0.012,
beta_schedule="scaled_linear",
clip_sample=False,
set_alpha_to_one=False,
)
torch.manual_seed(0)
vae = AutoencoderKL(
block_out_channels=(32, 64),
in_channels=3,
out_channels=3,
down_block_types=("DownEncoderBlock2D", "DownEncoderBlock2D"),
up_block_types=("UpDecoderBlock2D", "UpDecoderBlock2D"),
latent_channels=4,
)
torch.manual_seed(0)
text_encoder_config = CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=32,
intermediate_size=37,
layer_norm_eps=1e-05,
num_attention_heads=4,
num_hidden_layers=5,
pad_token_id=1,
vocab_size=1000,
)
text_encoder = CLIPTextModel(text_encoder_config)
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
components = {
"unet": unet,
"scheduler": scheduler,
"vqvae": vae,
"bert": text_encoder,
"tokenizer": tokenizer,
}
return components
def get_dummy_inputs(self, device, seed=0):
if str(device).startswith("mps"):
generator = torch.manual_seed(seed)
else:
generator = torch.Generator(device=device).manual_seed(seed)
inputs = {
"prompt": "A painting of a squirrel eating a burger",
"generator": generator,
"num_inference_steps": 2,
"guidance_scale": 6.0,
"output_type": "np",
}
return inputs
def test_inference_text2img(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
components = self.get_dummy_components()
pipe = LDMTextToImagePipeline(**components)
pipe.to(device)
pipe.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
image = pipe(**inputs).images
image_slice = image[0, -3:, -3:, -1]
assert image.shape == (1, 16, 16, 3)
expected_slice = np.array([0.6101, 0.6156, 0.5622, 0.4895, 0.6661, 0.3804, 0.5748, 0.6136, 0.5014])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-3
@nightly
@require_torch_gpu
class LDMTextToImagePipelineSlowTests(unittest.TestCase):
def setUp(self):
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def get_inputs(self, device, dtype=torch.float32, seed=0):
generator = torch.manual_seed(seed)
latents = np.random.RandomState(seed).standard_normal((1, 4, 32, 32))
latents = torch.from_numpy(latents).to(device=device, dtype=dtype)
inputs = {
"prompt": "A painting of a squirrel eating a burger",
"latents": latents,
"generator": generator,
"num_inference_steps": 3,
"guidance_scale": 6.0,
"output_type": "np",
}
return inputs
def test_ldm_default_ddim(self):
pipe = LDMTextToImagePipeline.from_pretrained("CompVis/ldm-text2im-large-256").to(torch_device)
pipe.set_progress_bar_config(disable=None)
inputs = self.get_inputs(torch_device)
image = pipe(**inputs).images
image_slice = image[0, -3:, -3:, -1].flatten()
assert image.shape == (1, 256, 256, 3)
expected_slice = np.array([0.51825, 0.52850, 0.52543, 0.54258, 0.52304, 0.52569, 0.54363, 0.55276, 0.56878])
max_diff = np.abs(expected_slice - image_slice).max()
assert max_diff < 1e-3
@nightly
@require_torch_gpu
class LDMTextToImagePipelineNightlyTests(unittest.TestCase):
def setUp(self):
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def get_inputs(self, device, dtype=torch.float32, seed=0):
generator = torch.manual_seed(seed)
latents = np.random.RandomState(seed).standard_normal((1, 4, 32, 32))
latents = torch.from_numpy(latents).to(device=device, dtype=dtype)
inputs = {
"prompt": "A painting of a squirrel eating a burger",
"latents": latents,
"generator": generator,
"num_inference_steps": 50,
"guidance_scale": 6.0,
"output_type": "np",
}
return inputs
def test_ldm_default_ddim(self):
pipe = LDMTextToImagePipeline.from_pretrained("CompVis/ldm-text2im-large-256").to(torch_device)
pipe.set_progress_bar_config(disable=None)
inputs = self.get_inputs(torch_device)
image = pipe(**inputs).images[0]
expected_image = load_numpy(
"https://huggingface.co/datasets/diffusers/test-arrays/resolve/main/ldm_text2img/ldm_large_256_ddim.npy"
)
max_diff = np.abs(expected_image - image).max()
assert max_diff < 1e-3
| diffusers/tests/pipelines/latent_diffusion/test_latent_diffusion.py/0 | {
"file_path": "diffusers/tests/pipelines/latent_diffusion/test_latent_diffusion.py",
"repo_id": "diffusers",
"token_count": 3447
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import inspect
import random
import unittest
import numpy as np
import torch
from transformers import CLIPTextConfig, CLIPTextModel, CLIPTokenizer
from diffusers import (
AutoencoderKL,
AutoencoderTiny,
AutoPipelineForImage2Image,
EulerDiscreteScheduler,
StableDiffusionImg2ImgPipeline,
StableDiffusionPAGImg2ImgPipeline,
UNet2DConditionModel,
)
from diffusers.utils.testing_utils import (
enable_full_determinism,
floats_tensor,
load_image,
require_torch_gpu,
slow,
torch_device,
)
from ..pipeline_params import (
IMAGE_TO_IMAGE_IMAGE_PARAMS,
TEXT_GUIDED_IMAGE_VARIATION_BATCH_PARAMS,
TEXT_GUIDED_IMAGE_VARIATION_PARAMS,
TEXT_TO_IMAGE_CALLBACK_CFG_PARAMS,
)
from ..test_pipelines_common import (
IPAdapterTesterMixin,
PipelineKarrasSchedulerTesterMixin,
PipelineLatentTesterMixin,
PipelineTesterMixin,
)
enable_full_determinism()
class StableDiffusionPAGImg2ImgPipelineFastTests(
IPAdapterTesterMixin,
PipelineLatentTesterMixin,
PipelineKarrasSchedulerTesterMixin,
PipelineTesterMixin,
unittest.TestCase,
):
pipeline_class = StableDiffusionPAGImg2ImgPipeline
params = TEXT_GUIDED_IMAGE_VARIATION_PARAMS.union({"pag_scale", "pag_adaptive_scale"}) - {"height", "width"}
required_optional_params = PipelineTesterMixin.required_optional_params - {"latents"}
batch_params = TEXT_GUIDED_IMAGE_VARIATION_BATCH_PARAMS
image_params = IMAGE_TO_IMAGE_IMAGE_PARAMS
image_latents_params = IMAGE_TO_IMAGE_IMAGE_PARAMS
callback_cfg_params = TEXT_TO_IMAGE_CALLBACK_CFG_PARAMS
def get_dummy_components(self, time_cond_proj_dim=None):
torch.manual_seed(0)
unet = UNet2DConditionModel(
block_out_channels=(32, 64),
layers_per_block=2,
time_cond_proj_dim=time_cond_proj_dim,
sample_size=32,
in_channels=4,
out_channels=4,
down_block_types=("DownBlock2D", "CrossAttnDownBlock2D"),
up_block_types=("CrossAttnUpBlock2D", "UpBlock2D"),
cross_attention_dim=32,
)
scheduler = EulerDiscreteScheduler(
beta_start=0.00085,
beta_end=0.012,
steps_offset=1,
beta_schedule="scaled_linear",
timestep_spacing="leading",
)
torch.manual_seed(0)
vae = AutoencoderKL(
block_out_channels=[32, 64],
in_channels=3,
out_channels=3,
down_block_types=["DownEncoderBlock2D", "DownEncoderBlock2D"],
up_block_types=["UpDecoderBlock2D", "UpDecoderBlock2D"],
latent_channels=4,
sample_size=128,
)
text_encoder_config = CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=32,
intermediate_size=37,
layer_norm_eps=1e-05,
num_attention_heads=4,
num_hidden_layers=5,
pad_token_id=1,
vocab_size=1000,
)
text_encoder = CLIPTextModel(text_encoder_config)
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
components = {
"unet": unet,
"scheduler": scheduler,
"vae": vae,
"text_encoder": text_encoder,
"tokenizer": tokenizer,
"safety_checker": None,
"feature_extractor": None,
"image_encoder": None,
}
return components
def get_dummy_tiny_autoencoder(self):
return AutoencoderTiny(in_channels=3, out_channels=3, latent_channels=4)
def get_dummy_inputs(self, device, seed=0):
image = floats_tensor((1, 3, 32, 32), rng=random.Random(seed)).to(device)
image = image / 2 + 0.5
if str(device).startswith("mps"):
generator = torch.manual_seed(seed)
else:
generator = torch.Generator(device=device).manual_seed(seed)
inputs = {
"prompt": "A painting of a squirrel eating a burger",
"image": image,
"generator": generator,
"num_inference_steps": 2,
"guidance_scale": 6.0,
"pag_scale": 0.9,
"output_type": "np",
}
return inputs
def test_pag_disable_enable(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
components = self.get_dummy_components()
# base pipeline (expect same output when pag is disabled)
pipe_sd = StableDiffusionImg2ImgPipeline(**components)
pipe_sd = pipe_sd.to(device)
pipe_sd.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
del inputs["pag_scale"]
assert (
"pag_scale" not in inspect.signature(pipe_sd.__call__).parameters
), f"`pag_scale` should not be a call parameter of the base pipeline {pipe_sd.__class__.__name__}."
out = pipe_sd(**inputs).images[0, -3:, -3:, -1]
# pag disabled with pag_scale=0.0
pipe_pag = self.pipeline_class(**components)
pipe_pag = pipe_pag.to(device)
pipe_pag.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
inputs["pag_scale"] = 0.0
out_pag_disabled = pipe_pag(**inputs).images[0, -3:, -3:, -1]
# pag enabled
pipe_pag = self.pipeline_class(**components, pag_applied_layers=["mid", "up", "down"])
pipe_pag = pipe_pag.to(device)
pipe_pag.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
out_pag_enabled = pipe_pag(**inputs).images[0, -3:, -3:, -1]
assert np.abs(out.flatten() - out_pag_disabled.flatten()).max() < 1e-3
assert np.abs(out.flatten() - out_pag_enabled.flatten()).max() > 1e-3
def test_pag_inference(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
components = self.get_dummy_components()
pipe_pag = self.pipeline_class(**components, pag_applied_layers=["mid", "up", "down"])
pipe_pag = pipe_pag.to(device)
pipe_pag.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
image = pipe_pag(**inputs).images
image_slice = image[0, -3:, -3:, -1]
assert image.shape == (
1,
32,
32,
3,
), f"the shape of the output image should be (1, 32, 32, 3) but got {image.shape}"
expected_slice = np.array(
[0.44203848, 0.49598145, 0.42248967, 0.6707724, 0.5683791, 0.43603387, 0.58316565, 0.60077155, 0.5174199]
)
max_diff = np.abs(image_slice.flatten() - expected_slice).max()
self.assertLessEqual(max_diff, 1e-3)
@slow
@require_torch_gpu
class StableDiffusionPAGImg2ImgPipelineIntegrationTests(unittest.TestCase):
pipeline_class = StableDiffusionPAGImg2ImgPipeline
repo_id = "Jiali/stable-diffusion-1.5"
def setUp(self):
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def get_inputs(self, device, generator_device="cpu", dtype=torch.float32, seed=0):
generator = torch.Generator(device=generator_device).manual_seed(seed)
init_image = load_image(
"https://huggingface.co/datasets/diffusers/test-arrays/resolve/main"
"/stable_diffusion_img2img/sketch-mountains-input.png"
)
inputs = {
"prompt": "a fantasy landscape, concept art, high resolution",
"image": init_image,
"generator": generator,
"num_inference_steps": 3,
"strength": 0.75,
"guidance_scale": 7.5,
"pag_scale": 3.0,
"output_type": "np",
}
return inputs
def test_pag_cfg(self):
pipeline = AutoPipelineForImage2Image.from_pretrained(self.repo_id, enable_pag=True, torch_dtype=torch.float16)
pipeline.enable_model_cpu_offload()
pipeline.set_progress_bar_config(disable=None)
inputs = self.get_inputs(torch_device)
image = pipeline(**inputs).images
image_slice = image[0, -3:, -3:, -1].flatten()
assert image.shape == (1, 512, 512, 3)
expected_slice = np.array(
[0.58251953, 0.5722656, 0.5683594, 0.55029297, 0.52001953, 0.52001953, 0.49951172, 0.45410156, 0.50146484]
)
assert (
np.abs(image_slice.flatten() - expected_slice).max() < 1e-3
), f"output is different from expected, {image_slice.flatten()}"
def test_pag_uncond(self):
pipeline = AutoPipelineForImage2Image.from_pretrained(self.repo_id, enable_pag=True, torch_dtype=torch.float16)
pipeline.enable_model_cpu_offload()
pipeline.set_progress_bar_config(disable=None)
inputs = self.get_inputs(torch_device, guidance_scale=0.0)
image = pipeline(**inputs).images
image_slice = image[0, -3:, -3:, -1].flatten()
assert image.shape == (1, 512, 512, 3)
expected_slice = np.array(
[0.5986328, 0.52441406, 0.3972168, 0.4741211, 0.34985352, 0.22705078, 0.4128418, 0.2866211, 0.31713867]
)
assert (
np.abs(image_slice.flatten() - expected_slice).max() < 1e-3
), f"output is different from expected, {image_slice.flatten()}"
| diffusers/tests/pipelines/pag/test_pag_sd_img2img.py/0 | {
"file_path": "diffusers/tests/pipelines/pag/test_pag_sd_img2img.py",
"repo_id": "diffusers",
"token_count": 4762
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import unittest
import numpy as np
from diffusers import LMSDiscreteScheduler, OnnxStableDiffusionInpaintPipeline
from diffusers.utils.testing_utils import (
is_onnx_available,
load_image,
nightly,
require_onnxruntime,
require_torch_gpu,
)
from ..test_pipelines_onnx_common import OnnxPipelineTesterMixin
if is_onnx_available():
import onnxruntime as ort
class OnnxStableDiffusionPipelineFastTests(OnnxPipelineTesterMixin, unittest.TestCase):
# FIXME: add fast tests
pass
@nightly
@require_onnxruntime
@require_torch_gpu
class OnnxStableDiffusionInpaintPipelineIntegrationTests(unittest.TestCase):
@property
def gpu_provider(self):
return (
"CUDAExecutionProvider",
{
"gpu_mem_limit": "15000000000", # 15GB
"arena_extend_strategy": "kSameAsRequested",
},
)
@property
def gpu_options(self):
options = ort.SessionOptions()
options.enable_mem_pattern = False
return options
def test_inference_default_pndm(self):
init_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/in_paint/overture-creations-5sI6fQgYIuo.png"
)
mask_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/in_paint/overture-creations-5sI6fQgYIuo_mask.png"
)
pipe = OnnxStableDiffusionInpaintPipeline.from_pretrained(
"botp/stable-diffusion-v1-5-inpainting",
revision="onnx",
safety_checker=None,
feature_extractor=None,
provider=self.gpu_provider,
sess_options=self.gpu_options,
)
pipe.set_progress_bar_config(disable=None)
prompt = "A red cat sitting on a park bench"
generator = np.random.RandomState(0)
output = pipe(
prompt=prompt,
image=init_image,
mask_image=mask_image,
guidance_scale=7.5,
num_inference_steps=10,
generator=generator,
output_type="np",
)
images = output.images
image_slice = images[0, 255:258, 255:258, -1]
assert images.shape == (1, 512, 512, 3)
expected_slice = np.array([0.2514, 0.3007, 0.3517, 0.1790, 0.2382, 0.3167, 0.1944, 0.2273, 0.2464])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-3
def test_inference_k_lms(self):
init_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/in_paint/overture-creations-5sI6fQgYIuo.png"
)
mask_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/in_paint/overture-creations-5sI6fQgYIuo_mask.png"
)
lms_scheduler = LMSDiscreteScheduler.from_pretrained(
"botp/stable-diffusion-v1-5-inpainting", subfolder="scheduler", revision="onnx"
)
pipe = OnnxStableDiffusionInpaintPipeline.from_pretrained(
"botp/stable-diffusion-v1-5-inpainting",
revision="onnx",
scheduler=lms_scheduler,
safety_checker=None,
feature_extractor=None,
provider=self.gpu_provider,
sess_options=self.gpu_options,
)
pipe.set_progress_bar_config(disable=None)
prompt = "A red cat sitting on a park bench"
generator = np.random.RandomState(0)
output = pipe(
prompt=prompt,
image=init_image,
mask_image=mask_image,
guidance_scale=7.5,
num_inference_steps=20,
generator=generator,
output_type="np",
)
images = output.images
image_slice = images[0, 255:258, 255:258, -1]
assert images.shape == (1, 512, 512, 3)
expected_slice = np.array([0.0086, 0.0077, 0.0083, 0.0093, 0.0107, 0.0139, 0.0094, 0.0097, 0.0125])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-3
| diffusers/tests/pipelines/stable_diffusion/test_onnx_stable_diffusion_inpaint.py/0 | {
"file_path": "diffusers/tests/pipelines/stable_diffusion/test_onnx_stable_diffusion_inpaint.py",
"repo_id": "diffusers",
"token_count": 2254
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import time
import unittest
import numpy as np
import torch
from huggingface_hub import hf_hub_download
from transformers import CLIPTextConfig, CLIPTextModel, CLIPTokenizer
from diffusers import (
AutoencoderKL,
DDIMScheduler,
DPMSolverMultistepScheduler,
EulerDiscreteScheduler,
StableDiffusionPipeline,
UNet2DConditionModel,
)
from diffusers.utils.testing_utils import (
enable_full_determinism,
load_numpy,
numpy_cosine_similarity_distance,
require_accelerator,
require_torch_gpu,
slow,
torch_device,
)
enable_full_determinism()
class StableDiffusion2VPredictionPipelineFastTests(unittest.TestCase):
def setUp(self):
# clean up the VRAM before each test
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
# clean up the VRAM after each test
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
@property
def dummy_cond_unet(self):
torch.manual_seed(0)
model = UNet2DConditionModel(
block_out_channels=(32, 64),
layers_per_block=2,
sample_size=32,
in_channels=4,
out_channels=4,
down_block_types=("DownBlock2D", "CrossAttnDownBlock2D"),
up_block_types=("CrossAttnUpBlock2D", "UpBlock2D"),
cross_attention_dim=32,
# SD2-specific config below
attention_head_dim=(2, 4),
use_linear_projection=True,
)
return model
@property
def dummy_vae(self):
torch.manual_seed(0)
model = AutoencoderKL(
block_out_channels=[32, 64],
in_channels=3,
out_channels=3,
down_block_types=["DownEncoderBlock2D", "DownEncoderBlock2D"],
up_block_types=["UpDecoderBlock2D", "UpDecoderBlock2D"],
latent_channels=4,
sample_size=128,
)
return model
@property
def dummy_text_encoder(self):
torch.manual_seed(0)
config = CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=32,
intermediate_size=37,
layer_norm_eps=1e-05,
num_attention_heads=4,
num_hidden_layers=5,
pad_token_id=1,
vocab_size=1000,
# SD2-specific config below
hidden_act="gelu",
projection_dim=64,
)
return CLIPTextModel(config)
def test_stable_diffusion_v_pred_ddim(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
unet = self.dummy_cond_unet
scheduler = DDIMScheduler(
beta_start=0.00085,
beta_end=0.012,
beta_schedule="scaled_linear",
clip_sample=False,
set_alpha_to_one=False,
prediction_type="v_prediction",
)
vae = self.dummy_vae
bert = self.dummy_text_encoder
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
# make sure here that pndm scheduler skips prk
sd_pipe = StableDiffusionPipeline(
unet=unet,
scheduler=scheduler,
vae=vae,
text_encoder=bert,
tokenizer=tokenizer,
safety_checker=None,
feature_extractor=None,
image_encoder=None,
requires_safety_checker=False,
)
sd_pipe = sd_pipe.to(device)
sd_pipe.set_progress_bar_config(disable=None)
prompt = "A painting of a squirrel eating a burger"
generator = torch.Generator(device=device).manual_seed(0)
output = sd_pipe([prompt], generator=generator, guidance_scale=6.0, num_inference_steps=2, output_type="np")
image = output.images
generator = torch.Generator(device=device).manual_seed(0)
image_from_tuple = sd_pipe(
[prompt],
generator=generator,
guidance_scale=6.0,
num_inference_steps=2,
output_type="np",
return_dict=False,
)[0]
image_slice = image[0, -3:, -3:, -1]
image_from_tuple_slice = image_from_tuple[0, -3:, -3:, -1]
assert image.shape == (1, 64, 64, 3)
expected_slice = np.array([0.6569, 0.6525, 0.5142, 0.4968, 0.4923, 0.4601, 0.4996, 0.5041, 0.4544])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-2
assert np.abs(image_from_tuple_slice.flatten() - expected_slice).max() < 1e-2
def test_stable_diffusion_v_pred_k_euler(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
unet = self.dummy_cond_unet
scheduler = EulerDiscreteScheduler(
beta_start=0.00085, beta_end=0.012, beta_schedule="scaled_linear", prediction_type="v_prediction"
)
vae = self.dummy_vae
bert = self.dummy_text_encoder
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
# make sure here that pndm scheduler skips prk
sd_pipe = StableDiffusionPipeline(
unet=unet,
scheduler=scheduler,
vae=vae,
text_encoder=bert,
tokenizer=tokenizer,
safety_checker=None,
feature_extractor=None,
image_encoder=None,
requires_safety_checker=False,
)
sd_pipe = sd_pipe.to(device)
sd_pipe.set_progress_bar_config(disable=None)
prompt = "A painting of a squirrel eating a burger"
generator = torch.Generator(device=device).manual_seed(0)
output = sd_pipe([prompt], generator=generator, guidance_scale=6.0, num_inference_steps=2, output_type="np")
image = output.images
generator = torch.Generator(device=device).manual_seed(0)
image_from_tuple = sd_pipe(
[prompt],
generator=generator,
guidance_scale=6.0,
num_inference_steps=2,
output_type="np",
return_dict=False,
)[0]
image_slice = image[0, -3:, -3:, -1]
image_from_tuple_slice = image_from_tuple[0, -3:, -3:, -1]
assert image.shape == (1, 64, 64, 3)
expected_slice = np.array([0.5644, 0.6514, 0.5190, 0.5663, 0.5287, 0.4953, 0.5430, 0.5243, 0.4778])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-2
assert np.abs(image_from_tuple_slice.flatten() - expected_slice).max() < 1e-2
@require_accelerator
def test_stable_diffusion_v_pred_fp16(self):
"""Test that stable diffusion v-prediction works with fp16"""
unet = self.dummy_cond_unet
scheduler = DDIMScheduler(
beta_start=0.00085,
beta_end=0.012,
beta_schedule="scaled_linear",
clip_sample=False,
set_alpha_to_one=False,
prediction_type="v_prediction",
)
vae = self.dummy_vae
bert = self.dummy_text_encoder
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
# put models in fp16
unet = unet.half()
vae = vae.half()
bert = bert.half()
# make sure here that pndm scheduler skips prk
sd_pipe = StableDiffusionPipeline(
unet=unet,
scheduler=scheduler,
vae=vae,
text_encoder=bert,
tokenizer=tokenizer,
safety_checker=None,
feature_extractor=None,
image_encoder=None,
requires_safety_checker=False,
)
sd_pipe = sd_pipe.to(torch_device)
sd_pipe.set_progress_bar_config(disable=None)
prompt = "A painting of a squirrel eating a burger"
generator = torch.manual_seed(0)
image = sd_pipe([prompt], generator=generator, num_inference_steps=2, output_type="np").images
assert image.shape == (1, 64, 64, 3)
@slow
@require_torch_gpu
class StableDiffusion2VPredictionPipelineIntegrationTests(unittest.TestCase):
def setUp(self):
# clean up the VRAM before each test
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
# clean up the VRAM after each test
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def test_stable_diffusion_v_pred_default(self):
sd_pipe = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2")
sd_pipe = sd_pipe.to(torch_device)
sd_pipe.enable_attention_slicing()
sd_pipe.set_progress_bar_config(disable=None)
prompt = "A painting of a squirrel eating a burger"
generator = torch.manual_seed(0)
output = sd_pipe([prompt], generator=generator, guidance_scale=7.5, num_inference_steps=20, output_type="np")
image = output.images
image_slice = image[0, 253:256, 253:256, -1]
assert image.shape == (1, 768, 768, 3)
expected_slice = np.array([0.1868, 0.1922, 0.1527, 0.1921, 0.1908, 0.1624, 0.1779, 0.1652, 0.1734])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-2
def test_stable_diffusion_v_pred_upcast_attention(self):
sd_pipe = StableDiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-2-1", torch_dtype=torch.float16
)
sd_pipe = sd_pipe.to(torch_device)
sd_pipe.enable_attention_slicing()
sd_pipe.set_progress_bar_config(disable=None)
prompt = "A painting of a squirrel eating a burger"
generator = torch.manual_seed(0)
output = sd_pipe([prompt], generator=generator, guidance_scale=7.5, num_inference_steps=20, output_type="np")
image = output.images
image_slice = image[0, 253:256, 253:256, -1]
assert image.shape == (1, 768, 768, 3)
expected_slice = np.array([0.4209, 0.4087, 0.4097, 0.4209, 0.3860, 0.4329, 0.4280, 0.4324, 0.4187])
assert np.abs(image_slice.flatten() - expected_slice).max() < 5e-2
def test_stable_diffusion_v_pred_euler(self):
scheduler = EulerDiscreteScheduler.from_pretrained("stabilityai/stable-diffusion-2", subfolder="scheduler")
sd_pipe = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2", scheduler=scheduler)
sd_pipe = sd_pipe.to(torch_device)
sd_pipe.enable_attention_slicing()
sd_pipe.set_progress_bar_config(disable=None)
prompt = "A painting of a squirrel eating a burger"
generator = torch.manual_seed(0)
output = sd_pipe([prompt], generator=generator, num_inference_steps=5, output_type="np")
image = output.images
image_slice = image[0, 253:256, 253:256, -1]
assert image.shape == (1, 768, 768, 3)
expected_slice = np.array([0.1781, 0.1695, 0.1661, 0.1705, 0.1588, 0.1699, 0.2005, 0.1589, 0.1677])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-2
def test_stable_diffusion_v_pred_dpm(self):
"""
TODO: update this test after making DPM compatible with V-prediction!
"""
scheduler = DPMSolverMultistepScheduler.from_pretrained(
"stabilityai/stable-diffusion-2",
subfolder="scheduler",
final_sigmas_type="sigma_min",
)
sd_pipe = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2", scheduler=scheduler)
sd_pipe = sd_pipe.to(torch_device)
sd_pipe.enable_attention_slicing()
sd_pipe.set_progress_bar_config(disable=None)
prompt = "a photograph of an astronaut riding a horse"
generator = torch.manual_seed(0)
image = sd_pipe(
[prompt], generator=generator, guidance_scale=7.5, num_inference_steps=5, output_type="np"
).images
image_slice = image[0, 253:256, 253:256, -1]
assert image.shape == (1, 768, 768, 3)
expected_slice = np.array([0.3303, 0.3184, 0.3291, 0.3300, 0.3256, 0.3113, 0.2965, 0.3134, 0.3192])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-2
def test_stable_diffusion_attention_slicing_v_pred(self):
torch.cuda.reset_peak_memory_stats()
model_id = "stabilityai/stable-diffusion-2"
pipe = StableDiffusionPipeline.from_pretrained(model_id, torch_dtype=torch.float16)
pipe.to(torch_device)
pipe.set_progress_bar_config(disable=None)
prompt = "a photograph of an astronaut riding a horse"
# make attention efficient
pipe.enable_attention_slicing()
generator = torch.manual_seed(0)
output_chunked = pipe(
[prompt], generator=generator, guidance_scale=7.5, num_inference_steps=10, output_type="np"
)
image_chunked = output_chunked.images
mem_bytes = torch.cuda.max_memory_allocated()
torch.cuda.reset_peak_memory_stats()
# make sure that less than 5.5 GB is allocated
assert mem_bytes < 5.5 * 10**9
# disable slicing
pipe.disable_attention_slicing()
generator = torch.manual_seed(0)
output = pipe([prompt], generator=generator, guidance_scale=7.5, num_inference_steps=10, output_type="np")
image = output.images
# make sure that more than 3.0 GB is allocated
mem_bytes = torch.cuda.max_memory_allocated()
assert mem_bytes > 3 * 10**9
max_diff = numpy_cosine_similarity_distance(image.flatten(), image_chunked.flatten())
assert max_diff < 1e-3
def test_stable_diffusion_text2img_pipeline_v_pred_default(self):
expected_image = load_numpy(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/"
"sd2-text2img/astronaut_riding_a_horse_v_pred.npy"
)
pipe = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2")
pipe.to(torch_device)
pipe.enable_attention_slicing()
pipe.set_progress_bar_config(disable=None)
prompt = "astronaut riding a horse"
generator = torch.manual_seed(0)
output = pipe(prompt=prompt, guidance_scale=7.5, generator=generator, output_type="np")
image = output.images[0]
assert image.shape == (768, 768, 3)
max_diff = numpy_cosine_similarity_distance(image.flatten(), expected_image.flatten())
assert max_diff < 1e-3
def test_stable_diffusion_text2img_pipeline_unflawed(self):
expected_image = load_numpy(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/"
"sd2-text2img/lion_galaxy.npy"
)
pipe = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2-1")
pipe.scheduler = DDIMScheduler.from_config(
pipe.scheduler.config, timestep_spacing="trailing", rescale_betas_zero_snr=True
)
pipe.enable_model_cpu_offload()
pipe.set_progress_bar_config(disable=None)
prompt = "A lion in galaxies, spirals, nebulae, stars, smoke, iridescent, intricate detail, octane render, 8k"
generator = torch.Generator("cpu").manual_seed(0)
output = pipe(
prompt=prompt,
guidance_scale=7.5,
num_inference_steps=10,
guidance_rescale=0.7,
generator=generator,
output_type="np",
)
image = output.images[0]
assert image.shape == (768, 768, 3)
max_diff = numpy_cosine_similarity_distance(image.flatten(), expected_image.flatten())
assert max_diff < 5e-2
def test_stable_diffusion_text2img_pipeline_v_pred_fp16(self):
expected_image = load_numpy(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/"
"sd2-text2img/astronaut_riding_a_horse_v_pred_fp16.npy"
)
pipe = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2", torch_dtype=torch.float16)
pipe.to(torch_device)
pipe.set_progress_bar_config(disable=None)
prompt = "astronaut riding a horse"
generator = torch.manual_seed(0)
output = pipe(prompt=prompt, guidance_scale=7.5, generator=generator, output_type="np")
image = output.images[0]
assert image.shape == (768, 768, 3)
max_diff = numpy_cosine_similarity_distance(image.flatten(), expected_image.flatten())
assert max_diff < 1e-3
def test_download_local(self):
filename = hf_hub_download("stabilityai/stable-diffusion-2-1", filename="v2-1_768-ema-pruned.safetensors")
pipe = StableDiffusionPipeline.from_single_file(filename, torch_dtype=torch.float16)
pipe.scheduler = DDIMScheduler.from_config(pipe.scheduler.config)
pipe.enable_model_cpu_offload()
image_out = pipe("test", num_inference_steps=1, output_type="np").images[0]
assert image_out.shape == (768, 768, 3)
def test_stable_diffusion_text2img_intermediate_state_v_pred(self):
number_of_steps = 0
def test_callback_fn(step: int, timestep: int, latents: torch.Tensor) -> None:
test_callback_fn.has_been_called = True
nonlocal number_of_steps
number_of_steps += 1
if step == 0:
latents = latents.detach().cpu().numpy()
assert latents.shape == (1, 4, 96, 96)
latents_slice = latents[0, -3:, -3:, -1]
expected_slice = np.array([0.7749, 0.0325, 0.5088, 0.1619, 0.3372, 0.3667, -0.5186, 0.6860, 1.4326])
assert np.abs(latents_slice.flatten() - expected_slice).max() < 5e-2
elif step == 19:
latents = latents.detach().cpu().numpy()
assert latents.shape == (1, 4, 96, 96)
latents_slice = latents[0, -3:, -3:, -1]
expected_slice = np.array([1.3887, 1.0273, 1.7266, 0.0726, 0.6611, 0.1598, -1.0547, 0.1522, 0.0227])
assert np.abs(latents_slice.flatten() - expected_slice).max() < 5e-2
test_callback_fn.has_been_called = False
pipe = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2", torch_dtype=torch.float16)
pipe = pipe.to(torch_device)
pipe.set_progress_bar_config(disable=None)
pipe.enable_attention_slicing()
prompt = "Andromeda galaxy in a bottle"
generator = torch.manual_seed(0)
pipe(
prompt=prompt,
num_inference_steps=20,
guidance_scale=7.5,
generator=generator,
callback=test_callback_fn,
callback_steps=1,
)
assert test_callback_fn.has_been_called
assert number_of_steps == 20
def test_stable_diffusion_low_cpu_mem_usage_v_pred(self):
pipeline_id = "stabilityai/stable-diffusion-2"
start_time = time.time()
pipeline_low_cpu_mem_usage = StableDiffusionPipeline.from_pretrained(pipeline_id, torch_dtype=torch.float16)
pipeline_low_cpu_mem_usage.to(torch_device)
low_cpu_mem_usage_time = time.time() - start_time
start_time = time.time()
_ = StableDiffusionPipeline.from_pretrained(pipeline_id, torch_dtype=torch.float16, low_cpu_mem_usage=False)
normal_load_time = time.time() - start_time
assert 2 * low_cpu_mem_usage_time < normal_load_time
def test_stable_diffusion_pipeline_with_sequential_cpu_offloading_v_pred(self):
torch.cuda.empty_cache()
torch.cuda.reset_max_memory_allocated()
torch.cuda.reset_peak_memory_stats()
pipeline_id = "stabilityai/stable-diffusion-2"
prompt = "Andromeda galaxy in a bottle"
pipeline = StableDiffusionPipeline.from_pretrained(pipeline_id, torch_dtype=torch.float16)
pipeline.enable_attention_slicing(1)
pipeline.enable_sequential_cpu_offload()
generator = torch.manual_seed(0)
_ = pipeline(prompt, generator=generator, num_inference_steps=5)
mem_bytes = torch.cuda.max_memory_allocated()
# make sure that less than 2.8 GB is allocated
assert mem_bytes < 2.8 * 10**9
| diffusers/tests/pipelines/stable_diffusion_2/test_stable_diffusion_v_pred.py/0 | {
"file_path": "diffusers/tests/pipelines/stable_diffusion_2/test_stable_diffusion_v_pred.py",
"repo_id": "diffusers",
"token_count": 9708
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import unittest
import numpy as np
import torch
from transformers import CLIPTextConfig, CLIPTextModel, CLIPTokenizer
from diffusers import (
AutoencoderKL,
DDIMScheduler,
PNDMScheduler,
StableDiffusionLDM3DPipeline,
UNet2DConditionModel,
)
from diffusers.utils.testing_utils import enable_full_determinism, nightly, require_torch_gpu, torch_device
from ..pipeline_params import TEXT_TO_IMAGE_BATCH_PARAMS, TEXT_TO_IMAGE_IMAGE_PARAMS, TEXT_TO_IMAGE_PARAMS
enable_full_determinism()
class StableDiffusionLDM3DPipelineFastTests(unittest.TestCase):
pipeline_class = StableDiffusionLDM3DPipeline
params = TEXT_TO_IMAGE_PARAMS
batch_params = TEXT_TO_IMAGE_BATCH_PARAMS
image_params = TEXT_TO_IMAGE_IMAGE_PARAMS
def get_dummy_components(self):
torch.manual_seed(0)
unet = UNet2DConditionModel(
block_out_channels=(32, 64),
layers_per_block=2,
sample_size=32,
in_channels=4,
out_channels=4,
down_block_types=("DownBlock2D", "CrossAttnDownBlock2D"),
up_block_types=("CrossAttnUpBlock2D", "UpBlock2D"),
cross_attention_dim=32,
)
scheduler = DDIMScheduler(
beta_start=0.00085,
beta_end=0.012,
beta_schedule="scaled_linear",
clip_sample=False,
set_alpha_to_one=False,
)
torch.manual_seed(0)
vae = AutoencoderKL(
block_out_channels=[32, 64],
in_channels=6,
out_channels=6,
down_block_types=["DownEncoderBlock2D", "DownEncoderBlock2D"],
up_block_types=["UpDecoderBlock2D", "UpDecoderBlock2D"],
latent_channels=4,
)
torch.manual_seed(0)
text_encoder_config = CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=32,
intermediate_size=37,
layer_norm_eps=1e-05,
num_attention_heads=4,
num_hidden_layers=5,
pad_token_id=1,
vocab_size=1000,
)
text_encoder = CLIPTextModel(text_encoder_config)
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
components = {
"unet": unet,
"scheduler": scheduler,
"vae": vae,
"text_encoder": text_encoder,
"tokenizer": tokenizer,
"safety_checker": None,
"feature_extractor": None,
"image_encoder": None,
}
return components
def get_dummy_inputs(self, device, seed=0):
if str(device).startswith("mps"):
generator = torch.manual_seed(seed)
else:
generator = torch.Generator(device=device).manual_seed(seed)
inputs = {
"prompt": "A painting of a squirrel eating a burger",
"generator": generator,
"num_inference_steps": 2,
"guidance_scale": 6.0,
"output_type": "np",
}
return inputs
def test_stable_diffusion_ddim(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
components = self.get_dummy_components()
ldm3d_pipe = StableDiffusionLDM3DPipeline(**components)
ldm3d_pipe = ldm3d_pipe.to(torch_device)
ldm3d_pipe.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
output = ldm3d_pipe(**inputs)
rgb, depth = output.rgb, output.depth
image_slice_rgb = rgb[0, -3:, -3:, -1]
image_slice_depth = depth[0, -3:, -1]
assert rgb.shape == (1, 64, 64, 3)
assert depth.shape == (1, 64, 64)
expected_slice_rgb = np.array(
[0.37338176, 0.70247, 0.74203193, 0.51643604, 0.58256793, 0.60932136, 0.4181095, 0.48355877, 0.46535262]
)
expected_slice_depth = np.array([103.46727, 85.812004, 87.849236])
assert np.abs(image_slice_rgb.flatten() - expected_slice_rgb).max() < 1e-2
assert np.abs(image_slice_depth.flatten() - expected_slice_depth).max() < 1e-2
def test_stable_diffusion_prompt_embeds(self):
components = self.get_dummy_components()
ldm3d_pipe = StableDiffusionLDM3DPipeline(**components)
ldm3d_pipe = ldm3d_pipe.to(torch_device)
ldm3d_pipe.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(torch_device)
inputs["prompt"] = 3 * [inputs["prompt"]]
# forward
output = ldm3d_pipe(**inputs)
rgb_slice_1, depth_slice_1 = output.rgb, output.depth
rgb_slice_1 = rgb_slice_1[0, -3:, -3:, -1]
depth_slice_1 = depth_slice_1[0, -3:, -1]
inputs = self.get_dummy_inputs(torch_device)
prompt = 3 * [inputs.pop("prompt")]
text_inputs = ldm3d_pipe.tokenizer(
prompt,
padding="max_length",
max_length=ldm3d_pipe.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_inputs = text_inputs["input_ids"].to(torch_device)
prompt_embeds = ldm3d_pipe.text_encoder(text_inputs)[0]
inputs["prompt_embeds"] = prompt_embeds
# forward
output = ldm3d_pipe(**inputs)
rgb_slice_2, depth_slice_2 = output.rgb, output.depth
rgb_slice_2 = rgb_slice_2[0, -3:, -3:, -1]
depth_slice_2 = depth_slice_2[0, -3:, -1]
assert np.abs(rgb_slice_1.flatten() - rgb_slice_2.flatten()).max() < 1e-4
assert np.abs(depth_slice_1.flatten() - depth_slice_2.flatten()).max() < 1e-4
def test_stable_diffusion_negative_prompt(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
components = self.get_dummy_components()
components["scheduler"] = PNDMScheduler(skip_prk_steps=True)
ldm3d_pipe = StableDiffusionLDM3DPipeline(**components)
ldm3d_pipe = ldm3d_pipe.to(device)
ldm3d_pipe.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
negative_prompt = "french fries"
output = ldm3d_pipe(**inputs, negative_prompt=negative_prompt)
rgb, depth = output.rgb, output.depth
rgb_slice = rgb[0, -3:, -3:, -1]
depth_slice = depth[0, -3:, -1]
assert rgb.shape == (1, 64, 64, 3)
assert depth.shape == (1, 64, 64)
expected_slice_rgb = np.array(
[0.37044, 0.71811503, 0.7223251, 0.48603675, 0.5638391, 0.6364948, 0.42833704, 0.4901315, 0.47926217]
)
expected_slice_depth = np.array([107.84738, 84.62802, 89.962135])
assert np.abs(rgb_slice.flatten() - expected_slice_rgb).max() < 1e-2
assert np.abs(depth_slice.flatten() - expected_slice_depth).max() < 1e-2
@nightly
@require_torch_gpu
class StableDiffusionLDM3DPipelineSlowTests(unittest.TestCase):
def setUp(self):
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def get_inputs(self, device, generator_device="cpu", dtype=torch.float32, seed=0):
generator = torch.Generator(device=generator_device).manual_seed(seed)
latents = np.random.RandomState(seed).standard_normal((1, 4, 64, 64))
latents = torch.from_numpy(latents).to(device=device, dtype=dtype)
inputs = {
"prompt": "a photograph of an astronaut riding a horse",
"latents": latents,
"generator": generator,
"num_inference_steps": 3,
"guidance_scale": 7.5,
"output_type": "np",
}
return inputs
def test_ldm3d_stable_diffusion(self):
ldm3d_pipe = StableDiffusionLDM3DPipeline.from_pretrained("Intel/ldm3d")
ldm3d_pipe = ldm3d_pipe.to(torch_device)
ldm3d_pipe.set_progress_bar_config(disable=None)
inputs = self.get_inputs(torch_device)
output = ldm3d_pipe(**inputs)
rgb, depth = output.rgb, output.depth
rgb_slice = rgb[0, -3:, -3:, -1].flatten()
depth_slice = rgb[0, -3:, -1].flatten()
assert rgb.shape == (1, 512, 512, 3)
assert depth.shape == (1, 512, 512)
expected_slice_rgb = np.array(
[0.53805465, 0.56707305, 0.5486515, 0.57012236, 0.5814511, 0.56253487, 0.54843014, 0.55092263, 0.6459706]
)
expected_slice_depth = np.array(
[0.9263781, 0.6678672, 0.5486515, 0.92202145, 0.67831135, 0.56253487, 0.9241694, 0.7551478, 0.6459706]
)
assert np.abs(rgb_slice - expected_slice_rgb).max() < 3e-3
assert np.abs(depth_slice - expected_slice_depth).max() < 3e-3
@nightly
@require_torch_gpu
class StableDiffusionPipelineNightlyTests(unittest.TestCase):
def setUp(self):
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def get_inputs(self, device, generator_device="cpu", dtype=torch.float32, seed=0):
generator = torch.Generator(device=generator_device).manual_seed(seed)
latents = np.random.RandomState(seed).standard_normal((1, 4, 64, 64))
latents = torch.from_numpy(latents).to(device=device, dtype=dtype)
inputs = {
"prompt": "a photograph of an astronaut riding a horse",
"latents": latents,
"generator": generator,
"num_inference_steps": 50,
"guidance_scale": 7.5,
"output_type": "np",
}
return inputs
def test_ldm3d(self):
ldm3d_pipe = StableDiffusionLDM3DPipeline.from_pretrained("Intel/ldm3d").to(torch_device)
ldm3d_pipe.set_progress_bar_config(disable=None)
inputs = self.get_inputs(torch_device)
output = ldm3d_pipe(**inputs)
rgb, depth = output.rgb, output.depth
expected_rgb_mean = 0.495586
expected_rgb_std = 0.33795515
expected_depth_mean = 112.48518
expected_depth_std = 98.489746
assert np.abs(expected_rgb_mean - rgb.mean()) < 1e-3
assert np.abs(expected_rgb_std - rgb.std()) < 1e-3
assert np.abs(expected_depth_mean - depth.mean()) < 1e-3
assert np.abs(expected_depth_std - depth.std()) < 1e-3
def test_ldm3d_v2(self):
ldm3d_pipe = StableDiffusionLDM3DPipeline.from_pretrained("Intel/ldm3d-4c").to(torch_device)
ldm3d_pipe.set_progress_bar_config(disable=None)
inputs = self.get_inputs(torch_device)
output = ldm3d_pipe(**inputs)
rgb, depth = output.rgb, output.depth
expected_rgb_mean = 0.4194127
expected_rgb_std = 0.35375586
expected_depth_mean = 0.5638502
expected_depth_std = 0.34686103
assert rgb.shape == (1, 512, 512, 3)
assert depth.shape == (1, 512, 512, 1)
assert np.abs(expected_rgb_mean - rgb.mean()) < 1e-3
assert np.abs(expected_rgb_std - rgb.std()) < 1e-3
assert np.abs(expected_depth_mean - depth.mean()) < 1e-3
assert np.abs(expected_depth_std - depth.std()) < 1e-3
| diffusers/tests/pipelines/stable_diffusion_ldm3d/test_stable_diffusion_ldm3d.py/0 | {
"file_path": "diffusers/tests/pipelines/stable_diffusion_ldm3d/test_stable_diffusion_ldm3d.py",
"repo_id": "diffusers",
"token_count": 5675
} |
import gc
import random
import unittest
import numpy as np
import torch
from transformers import (
CLIPImageProcessor,
CLIPTextConfig,
CLIPTextModel,
CLIPTokenizer,
CLIPVisionConfig,
CLIPVisionModelWithProjection,
)
from diffusers import AutoencoderKL, DDIMScheduler, DDPMScheduler, StableUnCLIPImg2ImgPipeline, UNet2DConditionModel
from diffusers.pipelines.pipeline_utils import DiffusionPipeline
from diffusers.pipelines.stable_diffusion.stable_unclip_image_normalizer import StableUnCLIPImageNormalizer
from diffusers.utils.import_utils import is_xformers_available
from diffusers.utils.testing_utils import (
enable_full_determinism,
floats_tensor,
load_image,
load_numpy,
nightly,
require_torch_gpu,
skip_mps,
torch_device,
)
from ..pipeline_params import TEXT_GUIDED_IMAGE_VARIATION_BATCH_PARAMS, TEXT_GUIDED_IMAGE_VARIATION_PARAMS
from ..test_pipelines_common import (
PipelineKarrasSchedulerTesterMixin,
PipelineLatentTesterMixin,
PipelineTesterMixin,
assert_mean_pixel_difference,
)
enable_full_determinism()
class StableUnCLIPImg2ImgPipelineFastTests(
PipelineLatentTesterMixin, PipelineKarrasSchedulerTesterMixin, PipelineTesterMixin, unittest.TestCase
):
pipeline_class = StableUnCLIPImg2ImgPipeline
params = TEXT_GUIDED_IMAGE_VARIATION_PARAMS
batch_params = TEXT_GUIDED_IMAGE_VARIATION_BATCH_PARAMS
image_params = frozenset(
[]
) # TO-DO: update image_params once pipeline is refactored with VaeImageProcessor.preprocess
image_latents_params = frozenset([])
supports_dduf = False
def get_dummy_components(self):
embedder_hidden_size = 32
embedder_projection_dim = embedder_hidden_size
# image encoding components
feature_extractor = CLIPImageProcessor(crop_size=32, size=32)
torch.manual_seed(0)
image_encoder = CLIPVisionModelWithProjection(
CLIPVisionConfig(
hidden_size=embedder_hidden_size,
projection_dim=embedder_projection_dim,
num_hidden_layers=5,
num_attention_heads=4,
image_size=32,
intermediate_size=37,
patch_size=1,
)
)
# regular denoising components
torch.manual_seed(0)
image_normalizer = StableUnCLIPImageNormalizer(embedding_dim=embedder_hidden_size)
image_noising_scheduler = DDPMScheduler(beta_schedule="squaredcos_cap_v2")
torch.manual_seed(0)
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
torch.manual_seed(0)
text_encoder = CLIPTextModel(
CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=embedder_hidden_size,
projection_dim=32,
intermediate_size=37,
layer_norm_eps=1e-05,
num_attention_heads=4,
num_hidden_layers=5,
pad_token_id=1,
vocab_size=1000,
)
)
torch.manual_seed(0)
unet = UNet2DConditionModel(
sample_size=32,
in_channels=4,
out_channels=4,
down_block_types=("CrossAttnDownBlock2D", "DownBlock2D"),
up_block_types=("UpBlock2D", "CrossAttnUpBlock2D"),
block_out_channels=(32, 64),
attention_head_dim=(2, 4),
class_embed_type="projection",
# The class embeddings are the noise augmented image embeddings.
# I.e. the image embeddings concated with the noised embeddings of the same dimension
projection_class_embeddings_input_dim=embedder_projection_dim * 2,
cross_attention_dim=embedder_hidden_size,
layers_per_block=1,
upcast_attention=True,
use_linear_projection=True,
)
torch.manual_seed(0)
scheduler = DDIMScheduler(
beta_schedule="scaled_linear",
beta_start=0.00085,
beta_end=0.012,
prediction_type="v_prediction",
set_alpha_to_one=False,
steps_offset=1,
)
torch.manual_seed(0)
vae = AutoencoderKL()
components = {
# image encoding components
"feature_extractor": feature_extractor,
"image_encoder": image_encoder.eval(),
# image noising components
"image_normalizer": image_normalizer.eval(),
"image_noising_scheduler": image_noising_scheduler,
# regular denoising components
"tokenizer": tokenizer,
"text_encoder": text_encoder.eval(),
"unet": unet.eval(),
"scheduler": scheduler,
"vae": vae.eval(),
}
return components
def get_dummy_inputs(self, device, seed=0, pil_image=True):
if str(device).startswith("mps"):
generator = torch.manual_seed(seed)
else:
generator = torch.Generator(device=device).manual_seed(seed)
input_image = floats_tensor((1, 3, 32, 32), rng=random.Random(seed)).to(device)
if pil_image:
input_image = input_image * 0.5 + 0.5
input_image = input_image.clamp(0, 1)
input_image = input_image.cpu().permute(0, 2, 3, 1).float().numpy()
input_image = DiffusionPipeline.numpy_to_pil(input_image)[0]
return {
"prompt": "An anime racoon running a marathon",
"image": input_image,
"generator": generator,
"num_inference_steps": 2,
"output_type": "np",
}
@skip_mps
def test_image_embeds_none(self):
device = "cpu" # ensure determinism for the device-dependent torch.Generator
components = self.get_dummy_components()
sd_pipe = StableUnCLIPImg2ImgPipeline(**components)
sd_pipe = sd_pipe.to(device)
sd_pipe.set_progress_bar_config(disable=None)
inputs = self.get_dummy_inputs(device)
inputs.update({"image_embeds": None})
image = sd_pipe(**inputs).images
image_slice = image[0, -3:, -3:, -1]
assert image.shape == (1, 32, 32, 3)
expected_slice = np.array([0.4397, 0.7080, 0.5590, 0.4255, 0.7181, 0.5938, 0.4051, 0.3720, 0.5116])
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-3
# Overriding PipelineTesterMixin::test_attention_slicing_forward_pass
# because GPU undeterminism requires a looser check.
def test_attention_slicing_forward_pass(self):
test_max_difference = torch_device in ["cpu", "mps"]
self._test_attention_slicing_forward_pass(test_max_difference=test_max_difference)
# Overriding PipelineTesterMixin::test_inference_batch_single_identical
# because undeterminism requires a looser check.
def test_inference_batch_single_identical(self):
self._test_inference_batch_single_identical(expected_max_diff=1e-3)
@unittest.skipIf(
torch_device != "cuda" or not is_xformers_available(),
reason="XFormers attention is only available with CUDA and `xformers` installed",
)
def test_xformers_attention_forwardGenerator_pass(self):
self._test_xformers_attention_forwardGenerator_pass(test_max_difference=False)
@nightly
@require_torch_gpu
class StableUnCLIPImg2ImgPipelineIntegrationTests(unittest.TestCase):
def setUp(self):
# clean up the VRAM before each test
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
# clean up the VRAM after each test
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def test_stable_unclip_l_img2img(self):
input_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/stable_unclip/turtle.png"
)
expected_image = load_numpy(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/stable_unclip/stable_unclip_2_1_l_img2img_anime_turtle_fp16.npy"
)
pipe = StableUnCLIPImg2ImgPipeline.from_pretrained(
"fusing/stable-unclip-2-1-l-img2img", torch_dtype=torch.float16
)
pipe.set_progress_bar_config(disable=None)
# stable unclip will oom when integration tests are run on a V100,
# so turn on memory savings
pipe.enable_attention_slicing()
pipe.enable_sequential_cpu_offload()
generator = torch.Generator(device="cpu").manual_seed(0)
output = pipe(input_image, "anime turle", generator=generator, output_type="np")
image = output.images[0]
assert image.shape == (768, 768, 3)
assert_mean_pixel_difference(image, expected_image)
def test_stable_unclip_h_img2img(self):
input_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/stable_unclip/turtle.png"
)
expected_image = load_numpy(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/stable_unclip/stable_unclip_2_1_h_img2img_anime_turtle_fp16.npy"
)
pipe = StableUnCLIPImg2ImgPipeline.from_pretrained(
"fusing/stable-unclip-2-1-h-img2img", torch_dtype=torch.float16
)
pipe.set_progress_bar_config(disable=None)
# stable unclip will oom when integration tests are run on a V100,
# so turn on memory savings
pipe.enable_attention_slicing()
pipe.enable_sequential_cpu_offload()
generator = torch.Generator(device="cpu").manual_seed(0)
output = pipe(input_image, "anime turle", generator=generator, output_type="np")
image = output.images[0]
assert image.shape == (768, 768, 3)
assert_mean_pixel_difference(image, expected_image)
def test_stable_unclip_img2img_pipeline_with_sequential_cpu_offloading(self):
input_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/stable_unclip/turtle.png"
)
torch.cuda.empty_cache()
torch.cuda.reset_max_memory_allocated()
torch.cuda.reset_peak_memory_stats()
pipe = StableUnCLIPImg2ImgPipeline.from_pretrained(
"fusing/stable-unclip-2-1-h-img2img", torch_dtype=torch.float16
)
pipe.set_progress_bar_config(disable=None)
pipe.enable_attention_slicing()
pipe.enable_sequential_cpu_offload()
_ = pipe(
input_image,
"anime turtle",
num_inference_steps=2,
output_type="np",
)
mem_bytes = torch.cuda.max_memory_allocated()
# make sure that less than 7 GB is allocated
assert mem_bytes < 7 * 10**9
| diffusers/tests/pipelines/stable_unclip/test_stable_unclip_img2img.py/0 | {
"file_path": "diffusers/tests/pipelines/stable_unclip/test_stable_unclip_img2img.py",
"repo_id": "diffusers",
"token_count": 5074
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import unittest
import numpy as np
import torch
from transformers import CLIPTextConfig, CLIPTextModelWithProjection, CLIPTokenizer
from diffusers import PriorTransformer, UnCLIPPipeline, UnCLIPScheduler, UNet2DConditionModel, UNet2DModel
from diffusers.pipelines.unclip.text_proj import UnCLIPTextProjModel
from diffusers.utils.testing_utils import (
enable_full_determinism,
load_numpy,
nightly,
require_torch_gpu,
skip_mps,
torch_device,
)
from ..pipeline_params import TEXT_TO_IMAGE_BATCH_PARAMS, TEXT_TO_IMAGE_PARAMS
from ..test_pipelines_common import PipelineTesterMixin, assert_mean_pixel_difference
enable_full_determinism()
class UnCLIPPipelineFastTests(PipelineTesterMixin, unittest.TestCase):
pipeline_class = UnCLIPPipeline
params = TEXT_TO_IMAGE_PARAMS - {
"negative_prompt",
"height",
"width",
"negative_prompt_embeds",
"guidance_scale",
"prompt_embeds",
"cross_attention_kwargs",
}
batch_params = TEXT_TO_IMAGE_BATCH_PARAMS
required_optional_params = [
"generator",
"return_dict",
"prior_num_inference_steps",
"decoder_num_inference_steps",
"super_res_num_inference_steps",
]
test_xformers_attention = False
@property
def text_embedder_hidden_size(self):
return 32
@property
def time_input_dim(self):
return 32
@property
def block_out_channels_0(self):
return self.time_input_dim
@property
def time_embed_dim(self):
return self.time_input_dim * 4
@property
def cross_attention_dim(self):
return 100
@property
def dummy_tokenizer(self):
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
return tokenizer
@property
def dummy_text_encoder(self):
torch.manual_seed(0)
config = CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=self.text_embedder_hidden_size,
projection_dim=self.text_embedder_hidden_size,
intermediate_size=37,
layer_norm_eps=1e-05,
num_attention_heads=4,
num_hidden_layers=5,
pad_token_id=1,
vocab_size=1000,
)
return CLIPTextModelWithProjection(config)
@property
def dummy_prior(self):
torch.manual_seed(0)
model_kwargs = {
"num_attention_heads": 2,
"attention_head_dim": 12,
"embedding_dim": self.text_embedder_hidden_size,
"num_layers": 1,
}
model = PriorTransformer(**model_kwargs)
return model
@property
def dummy_text_proj(self):
torch.manual_seed(0)
model_kwargs = {
"clip_embeddings_dim": self.text_embedder_hidden_size,
"time_embed_dim": self.time_embed_dim,
"cross_attention_dim": self.cross_attention_dim,
}
model = UnCLIPTextProjModel(**model_kwargs)
return model
@property
def dummy_decoder(self):
torch.manual_seed(0)
model_kwargs = {
"sample_size": 32,
# RGB in channels
"in_channels": 3,
# Out channels is double in channels because predicts mean and variance
"out_channels": 6,
"down_block_types": ("ResnetDownsampleBlock2D", "SimpleCrossAttnDownBlock2D"),
"up_block_types": ("SimpleCrossAttnUpBlock2D", "ResnetUpsampleBlock2D"),
"mid_block_type": "UNetMidBlock2DSimpleCrossAttn",
"block_out_channels": (self.block_out_channels_0, self.block_out_channels_0 * 2),
"layers_per_block": 1,
"cross_attention_dim": self.cross_attention_dim,
"attention_head_dim": 4,
"resnet_time_scale_shift": "scale_shift",
"class_embed_type": "identity",
}
model = UNet2DConditionModel(**model_kwargs)
return model
@property
def dummy_super_res_kwargs(self):
return {
"sample_size": 64,
"layers_per_block": 1,
"down_block_types": ("ResnetDownsampleBlock2D", "ResnetDownsampleBlock2D"),
"up_block_types": ("ResnetUpsampleBlock2D", "ResnetUpsampleBlock2D"),
"block_out_channels": (self.block_out_channels_0, self.block_out_channels_0 * 2),
"in_channels": 6,
"out_channels": 3,
}
@property
def dummy_super_res_first(self):
torch.manual_seed(0)
model = UNet2DModel(**self.dummy_super_res_kwargs)
return model
@property
def dummy_super_res_last(self):
# seeded differently to get different unet than `self.dummy_super_res_first`
torch.manual_seed(1)
model = UNet2DModel(**self.dummy_super_res_kwargs)
return model
def get_dummy_components(self):
prior = self.dummy_prior
decoder = self.dummy_decoder
text_proj = self.dummy_text_proj
text_encoder = self.dummy_text_encoder
tokenizer = self.dummy_tokenizer
super_res_first = self.dummy_super_res_first
super_res_last = self.dummy_super_res_last
prior_scheduler = UnCLIPScheduler(
variance_type="fixed_small_log",
prediction_type="sample",
num_train_timesteps=1000,
clip_sample_range=5.0,
)
decoder_scheduler = UnCLIPScheduler(
variance_type="learned_range",
prediction_type="epsilon",
num_train_timesteps=1000,
)
super_res_scheduler = UnCLIPScheduler(
variance_type="fixed_small_log",
prediction_type="epsilon",
num_train_timesteps=1000,
)
components = {
"prior": prior,
"decoder": decoder,
"text_proj": text_proj,
"text_encoder": text_encoder,
"tokenizer": tokenizer,
"super_res_first": super_res_first,
"super_res_last": super_res_last,
"prior_scheduler": prior_scheduler,
"decoder_scheduler": decoder_scheduler,
"super_res_scheduler": super_res_scheduler,
}
return components
def get_dummy_inputs(self, device, seed=0):
if str(device).startswith("mps"):
generator = torch.manual_seed(seed)
else:
generator = torch.Generator(device=device).manual_seed(seed)
inputs = {
"prompt": "horse",
"generator": generator,
"prior_num_inference_steps": 2,
"decoder_num_inference_steps": 2,
"super_res_num_inference_steps": 2,
"output_type": "np",
}
return inputs
def test_unclip(self):
device = "cpu"
components = self.get_dummy_components()
pipe = self.pipeline_class(**components)
pipe = pipe.to(device)
pipe.set_progress_bar_config(disable=None)
output = pipe(**self.get_dummy_inputs(device))
image = output.images
image_from_tuple = pipe(
**self.get_dummy_inputs(device),
return_dict=False,
)[0]
image_slice = image[0, -3:, -3:, -1]
image_from_tuple_slice = image_from_tuple[0, -3:, -3:, -1]
assert image.shape == (1, 64, 64, 3)
expected_slice = np.array(
[
0.9997,
0.9988,
0.0028,
0.9997,
0.9984,
0.9965,
0.0029,
0.9986,
0.0025,
]
)
assert np.abs(image_slice.flatten() - expected_slice).max() < 1e-2
assert np.abs(image_from_tuple_slice.flatten() - expected_slice).max() < 1e-2
def test_unclip_passed_text_embed(self):
device = torch.device("cpu")
class DummyScheduler:
init_noise_sigma = 1
components = self.get_dummy_components()
pipe = self.pipeline_class(**components)
pipe = pipe.to(device)
prior = components["prior"]
decoder = components["decoder"]
super_res_first = components["super_res_first"]
tokenizer = components["tokenizer"]
text_encoder = components["text_encoder"]
generator = torch.Generator(device=device).manual_seed(0)
dtype = prior.dtype
batch_size = 1
shape = (batch_size, prior.config.embedding_dim)
prior_latents = pipe.prepare_latents(
shape, dtype=dtype, device=device, generator=generator, latents=None, scheduler=DummyScheduler()
)
shape = (batch_size, decoder.config.in_channels, decoder.config.sample_size, decoder.config.sample_size)
decoder_latents = pipe.prepare_latents(
shape, dtype=dtype, device=device, generator=generator, latents=None, scheduler=DummyScheduler()
)
shape = (
batch_size,
super_res_first.config.in_channels // 2,
super_res_first.config.sample_size,
super_res_first.config.sample_size,
)
super_res_latents = pipe.prepare_latents(
shape, dtype=dtype, device=device, generator=generator, latents=None, scheduler=DummyScheduler()
)
pipe.set_progress_bar_config(disable=None)
prompt = "this is a prompt example"
generator = torch.Generator(device=device).manual_seed(0)
output = pipe(
[prompt],
generator=generator,
prior_num_inference_steps=2,
decoder_num_inference_steps=2,
super_res_num_inference_steps=2,
prior_latents=prior_latents,
decoder_latents=decoder_latents,
super_res_latents=super_res_latents,
output_type="np",
)
image = output.images
text_inputs = tokenizer(
prompt,
padding="max_length",
max_length=tokenizer.model_max_length,
return_tensors="pt",
)
text_model_output = text_encoder(text_inputs.input_ids)
text_attention_mask = text_inputs.attention_mask
generator = torch.Generator(device=device).manual_seed(0)
image_from_text = pipe(
generator=generator,
prior_num_inference_steps=2,
decoder_num_inference_steps=2,
super_res_num_inference_steps=2,
prior_latents=prior_latents,
decoder_latents=decoder_latents,
super_res_latents=super_res_latents,
text_model_output=text_model_output,
text_attention_mask=text_attention_mask,
output_type="np",
)[0]
# make sure passing text embeddings manually is identical
assert np.abs(image - image_from_text).max() < 1e-4
# Overriding PipelineTesterMixin::test_attention_slicing_forward_pass
# because UnCLIP GPU undeterminism requires a looser check.
@skip_mps
def test_attention_slicing_forward_pass(self):
test_max_difference = torch_device == "cpu"
self._test_attention_slicing_forward_pass(test_max_difference=test_max_difference, expected_max_diff=0.01)
# Overriding PipelineTesterMixin::test_inference_batch_single_identical
# because UnCLIP undeterminism requires a looser check.
@skip_mps
def test_inference_batch_single_identical(self):
additional_params_copy_to_batched_inputs = [
"prior_num_inference_steps",
"decoder_num_inference_steps",
"super_res_num_inference_steps",
]
self._test_inference_batch_single_identical(
additional_params_copy_to_batched_inputs=additional_params_copy_to_batched_inputs, expected_max_diff=5e-3
)
def test_inference_batch_consistent(self):
additional_params_copy_to_batched_inputs = [
"prior_num_inference_steps",
"decoder_num_inference_steps",
"super_res_num_inference_steps",
]
if torch_device == "mps":
# TODO: MPS errors with larger batch sizes
batch_sizes = [2, 3]
self._test_inference_batch_consistent(
batch_sizes=batch_sizes,
additional_params_copy_to_batched_inputs=additional_params_copy_to_batched_inputs,
)
else:
self._test_inference_batch_consistent(
additional_params_copy_to_batched_inputs=additional_params_copy_to_batched_inputs
)
@skip_mps
def test_dict_tuple_outputs_equivalent(self):
return super().test_dict_tuple_outputs_equivalent()
@skip_mps
def test_save_load_local(self):
return super().test_save_load_local(expected_max_difference=5e-3)
@skip_mps
def test_save_load_optional_components(self):
return super().test_save_load_optional_components()
@unittest.skip("UnCLIP produces very large differences in fp16 vs fp32. Test is not useful.")
def test_float16_inference(self):
super().test_float16_inference(expected_max_diff=1.0)
@nightly
class UnCLIPPipelineCPUIntegrationTests(unittest.TestCase):
def setUp(self):
# clean up the VRAM before each test
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
# clean up the VRAM after each test
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def test_unclip_karlo_cpu_fp32(self):
expected_image = load_numpy(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/unclip/karlo_v1_alpha_horse_cpu.npy"
)
pipeline = UnCLIPPipeline.from_pretrained("kakaobrain/karlo-v1-alpha")
pipeline.set_progress_bar_config(disable=None)
generator = torch.manual_seed(0)
output = pipeline(
"horse",
num_images_per_prompt=1,
generator=generator,
output_type="np",
)
image = output.images[0]
assert image.shape == (256, 256, 3)
assert np.abs(expected_image - image).max() < 1e-1
@nightly
@require_torch_gpu
class UnCLIPPipelineIntegrationTests(unittest.TestCase):
def setUp(self):
# clean up the VRAM before each test
super().setUp()
gc.collect()
torch.cuda.empty_cache()
def tearDown(self):
# clean up the VRAM after each test
super().tearDown()
gc.collect()
torch.cuda.empty_cache()
def test_unclip_karlo(self):
expected_image = load_numpy(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main"
"/unclip/karlo_v1_alpha_horse_fp16.npy"
)
pipeline = UnCLIPPipeline.from_pretrained("kakaobrain/karlo-v1-alpha", torch_dtype=torch.float16)
pipeline = pipeline.to(torch_device)
pipeline.set_progress_bar_config(disable=None)
generator = torch.Generator(device="cpu").manual_seed(0)
output = pipeline(
"horse",
generator=generator,
output_type="np",
)
image = output.images[0]
assert image.shape == (256, 256, 3)
assert_mean_pixel_difference(image, expected_image)
def test_unclip_pipeline_with_sequential_cpu_offloading(self):
torch.cuda.empty_cache()
torch.cuda.reset_max_memory_allocated()
torch.cuda.reset_peak_memory_stats()
pipe = UnCLIPPipeline.from_pretrained("kakaobrain/karlo-v1-alpha", torch_dtype=torch.float16)
pipe.set_progress_bar_config(disable=None)
pipe.enable_attention_slicing()
pipe.enable_sequential_cpu_offload()
_ = pipe(
"horse",
num_images_per_prompt=1,
prior_num_inference_steps=2,
decoder_num_inference_steps=2,
super_res_num_inference_steps=2,
output_type="np",
)
mem_bytes = torch.cuda.max_memory_allocated()
# make sure that less than 7 GB is allocated
assert mem_bytes < 7 * 10**9
| diffusers/tests/pipelines/unclip/test_unclip.py/0 | {
"file_path": "diffusers/tests/pipelines/unclip/test_unclip.py",
"repo_id": "diffusers",
"token_count": 7983
} |
import torch
from diffusers import CMStochasticIterativeScheduler
from .test_schedulers import SchedulerCommonTest
class CMStochasticIterativeSchedulerTest(SchedulerCommonTest):
scheduler_classes = (CMStochasticIterativeScheduler,)
num_inference_steps = 10
def get_scheduler_config(self, **kwargs):
config = {
"num_train_timesteps": 201,
"sigma_min": 0.002,
"sigma_max": 80.0,
}
config.update(**kwargs)
return config
# Override test_step_shape to add CMStochasticIterativeScheduler-specific logic regarding timesteps
# Problem is that we don't know two timesteps that will always be in the timestep schedule from only the scheduler
# config; scaled sigma_max is always in the timestep schedule, but sigma_min is in the sigma schedule while scaled
# sigma_min is not in the timestep schedule
def test_step_shape(self):
num_inference_steps = 10
scheduler_config = self.get_scheduler_config()
scheduler = self.scheduler_classes[0](**scheduler_config)
scheduler.set_timesteps(num_inference_steps)
timestep_0 = scheduler.timesteps[0]
timestep_1 = scheduler.timesteps[1]
sample = self.dummy_sample
residual = 0.1 * sample
output_0 = scheduler.step(residual, timestep_0, sample).prev_sample
output_1 = scheduler.step(residual, timestep_1, sample).prev_sample
self.assertEqual(output_0.shape, sample.shape)
self.assertEqual(output_0.shape, output_1.shape)
def test_timesteps(self):
for timesteps in [10, 50, 100, 1000]:
self.check_over_configs(num_train_timesteps=timesteps)
def test_clip_denoised(self):
for clip_denoised in [True, False]:
self.check_over_configs(clip_denoised=clip_denoised)
def test_full_loop_no_noise_onestep(self):
scheduler_class = self.scheduler_classes[0]
scheduler_config = self.get_scheduler_config()
scheduler = scheduler_class(**scheduler_config)
num_inference_steps = 1
scheduler.set_timesteps(num_inference_steps)
timesteps = scheduler.timesteps
generator = torch.manual_seed(0)
model = self.dummy_model()
sample = self.dummy_sample_deter * scheduler.init_noise_sigma
for i, t in enumerate(timesteps):
# 1. scale model input
scaled_sample = scheduler.scale_model_input(sample, t)
# 2. predict noise residual
residual = model(scaled_sample, t)
# 3. predict previous sample x_t-1
pred_prev_sample = scheduler.step(residual, t, sample, generator=generator).prev_sample
sample = pred_prev_sample
result_sum = torch.sum(torch.abs(sample))
result_mean = torch.mean(torch.abs(sample))
assert abs(result_sum.item() - 192.7614) < 1e-2
assert abs(result_mean.item() - 0.2510) < 1e-3
def test_full_loop_no_noise_multistep(self):
scheduler_class = self.scheduler_classes[0]
scheduler_config = self.get_scheduler_config()
scheduler = scheduler_class(**scheduler_config)
timesteps = [106, 0]
scheduler.set_timesteps(timesteps=timesteps)
timesteps = scheduler.timesteps
generator = torch.manual_seed(0)
model = self.dummy_model()
sample = self.dummy_sample_deter * scheduler.init_noise_sigma
for t in timesteps:
# 1. scale model input
scaled_sample = scheduler.scale_model_input(sample, t)
# 2. predict noise residual
residual = model(scaled_sample, t)
# 3. predict previous sample x_t-1
pred_prev_sample = scheduler.step(residual, t, sample, generator=generator).prev_sample
sample = pred_prev_sample
result_sum = torch.sum(torch.abs(sample))
result_mean = torch.mean(torch.abs(sample))
assert abs(result_sum.item() - 347.6357) < 1e-2
assert abs(result_mean.item() - 0.4527) < 1e-3
def test_full_loop_with_noise(self):
scheduler_class = self.scheduler_classes[0]
scheduler_config = self.get_scheduler_config()
scheduler = scheduler_class(**scheduler_config)
num_inference_steps = 10
t_start = 8
scheduler.set_timesteps(num_inference_steps)
timesteps = scheduler.timesteps
generator = torch.manual_seed(0)
model = self.dummy_model()
sample = self.dummy_sample_deter * scheduler.init_noise_sigma
noise = self.dummy_noise_deter
timesteps = scheduler.timesteps[t_start * scheduler.order :]
sample = scheduler.add_noise(sample, noise, timesteps[:1])
for t in timesteps:
# 1. scale model input
scaled_sample = scheduler.scale_model_input(sample, t)
# 2. predict noise residual
residual = model(scaled_sample, t)
# 3. predict previous sample x_t-1
pred_prev_sample = scheduler.step(residual, t, sample, generator=generator).prev_sample
sample = pred_prev_sample
result_sum = torch.sum(torch.abs(sample))
result_mean = torch.mean(torch.abs(sample))
assert abs(result_sum.item() - 763.9186) < 1e-2, f" expected result sum 763.9186, but get {result_sum}"
assert abs(result_mean.item() - 0.9947) < 1e-3, f" expected result mean 0.9947, but get {result_mean}"
def test_custom_timesteps_increasing_order(self):
scheduler_class = self.scheduler_classes[0]
scheduler_config = self.get_scheduler_config()
scheduler = scheduler_class(**scheduler_config)
timesteps = [39, 30, 12, 15, 0]
with self.assertRaises(ValueError, msg="`timesteps` must be in descending order."):
scheduler.set_timesteps(timesteps=timesteps)
def test_custom_timesteps_passing_both_num_inference_steps_and_timesteps(self):
scheduler_class = self.scheduler_classes[0]
scheduler_config = self.get_scheduler_config()
scheduler = scheduler_class(**scheduler_config)
timesteps = [39, 30, 12, 1, 0]
num_inference_steps = len(timesteps)
with self.assertRaises(ValueError, msg="Can only pass one of `num_inference_steps` or `timesteps`."):
scheduler.set_timesteps(num_inference_steps=num_inference_steps, timesteps=timesteps)
def test_custom_timesteps_too_large(self):
scheduler_class = self.scheduler_classes[0]
scheduler_config = self.get_scheduler_config()
scheduler = scheduler_class(**scheduler_config)
timesteps = [scheduler.config.num_train_timesteps]
with self.assertRaises(
ValueError,
msg="`timesteps` must start before `self.config.train_timesteps`: {scheduler.config.num_train_timesteps}}",
):
scheduler.set_timesteps(timesteps=timesteps)
| diffusers/tests/schedulers/test_scheduler_consistency_model.py/0 | {
"file_path": "diffusers/tests/schedulers/test_scheduler_consistency_model.py",
"repo_id": "diffusers",
"token_count": 3029
} |
# coding=utf-8
# Copyright 2024 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import unittest
import torch
from diffusers import (
AutoencoderDC,
)
from diffusers.utils.testing_utils import (
backend_empty_cache,
enable_full_determinism,
load_hf_numpy,
numpy_cosine_similarity_distance,
require_torch_accelerator,
slow,
torch_device,
)
enable_full_determinism()
@slow
@require_torch_accelerator
class AutoencoderDCSingleFileTests(unittest.TestCase):
model_class = AutoencoderDC
ckpt_path = "https://huggingface.co/mit-han-lab/dc-ae-f32c32-sana-1.0/blob/main/model.safetensors"
repo_id = "mit-han-lab/dc-ae-f32c32-sana-1.0-diffusers"
main_input_name = "sample"
base_precision = 1e-2
def setUp(self):
super().setUp()
gc.collect()
backend_empty_cache(torch_device)
def tearDown(self):
super().tearDown()
gc.collect()
backend_empty_cache(torch_device)
def get_file_format(self, seed, shape):
return f"gaussian_noise_s={seed}_shape={'_'.join([str(s) for s in shape])}.npy"
def get_sd_image(self, seed=0, shape=(4, 3, 512, 512), fp16=False):
dtype = torch.float16 if fp16 else torch.float32
image = torch.from_numpy(load_hf_numpy(self.get_file_format(seed, shape))).to(torch_device).to(dtype)
return image
def test_single_file_inference_same_as_pretrained(self):
model_1 = self.model_class.from_pretrained(self.repo_id).to(torch_device)
model_2 = self.model_class.from_single_file(self.ckpt_path, config=self.repo_id).to(torch_device)
image = self.get_sd_image(33)
with torch.no_grad():
sample_1 = model_1(image).sample
sample_2 = model_2(image).sample
assert sample_1.shape == sample_2.shape
output_slice_1 = sample_1.flatten().float().cpu()
output_slice_2 = sample_2.flatten().float().cpu()
assert numpy_cosine_similarity_distance(output_slice_1, output_slice_2) < 1e-4
def test_single_file_components(self):
model = self.model_class.from_pretrained(self.repo_id)
model_single_file = self.model_class.from_single_file(self.ckpt_path)
PARAMS_TO_IGNORE = ["torch_dtype", "_name_or_path", "_use_default_values", "_diffusers_version"]
for param_name, param_value in model_single_file.config.items():
if param_name in PARAMS_TO_IGNORE:
continue
assert (
model.config[param_name] == param_value
), f"{param_name} differs between pretrained loading and single file loading"
def test_single_file_in_type_variant_components(self):
# `in` variant checkpoints require passing in a `config` parameter
# in order to set the scaling factor correctly.
# `in` and `mix` variants have the same keys and we cannot automatically infer a scaling factor.
# We default to using teh `mix` config
repo_id = "mit-han-lab/dc-ae-f128c512-in-1.0-diffusers"
ckpt_path = "https://huggingface.co/mit-han-lab/dc-ae-f128c512-in-1.0/blob/main/model.safetensors"
model = self.model_class.from_pretrained(repo_id)
model_single_file = self.model_class.from_single_file(ckpt_path, config=repo_id)
PARAMS_TO_IGNORE = ["torch_dtype", "_name_or_path", "_use_default_values", "_diffusers_version"]
for param_name, param_value in model_single_file.config.items():
if param_name in PARAMS_TO_IGNORE:
continue
assert (
model.config[param_name] == param_value
), f"{param_name} differs between pretrained loading and single file loading"
def test_single_file_mix_type_variant_components(self):
repo_id = "mit-han-lab/dc-ae-f128c512-mix-1.0-diffusers"
ckpt_path = "https://huggingface.co/mit-han-lab/dc-ae-f128c512-mix-1.0/blob/main/model.safetensors"
model = self.model_class.from_pretrained(repo_id)
model_single_file = self.model_class.from_single_file(ckpt_path, config=repo_id)
PARAMS_TO_IGNORE = ["torch_dtype", "_name_or_path", "_use_default_values", "_diffusers_version"]
for param_name, param_value in model_single_file.config.items():
if param_name in PARAMS_TO_IGNORE:
continue
assert (
model.config[param_name] == param_value
), f"{param_name} differs between pretrained loading and single file loading"
| diffusers/tests/single_file/test_model_autoencoder_dc_single_file.py/0 | {
"file_path": "diffusers/tests/single_file/test_model_autoencoder_dc_single_file.py",
"repo_id": "diffusers",
"token_count": 2113
} |
import gc
import unittest
import torch
from diffusers import StableDiffusionXLInstructPix2PixPipeline
from diffusers.utils.testing_utils import (
backend_empty_cache,
enable_full_determinism,
require_torch_accelerator,
slow,
torch_device,
)
enable_full_determinism()
@slow
@require_torch_accelerator
class StableDiffusionXLInstructPix2PixPipeline(unittest.TestCase):
pipeline_class = StableDiffusionXLInstructPix2PixPipeline
ckpt_path = "https://huggingface.co/stabilityai/cosxl/blob/main/cosxl_edit.safetensors"
original_config = None
repo_id = "diffusers/sdxl-instructpix2pix-768"
def setUp(self):
super().setUp()
gc.collect()
backend_empty_cache(torch_device)
def tearDown(self):
super().tearDown()
gc.collect()
backend_empty_cache(torch_device)
def get_inputs(self, device, generator_device="cpu", dtype=torch.float32, seed=0):
generator = torch.Generator(device=generator_device).manual_seed(seed)
inputs = {
"prompt": "a fantasy landscape, concept art, high resolution",
"generator": generator,
"num_inference_steps": 2,
"strength": 0.75,
"guidance_scale": 7.5,
"output_type": "np",
}
return inputs
def test_single_file_setting_cosxl_edit(self):
# Default is PNDM for this checkpoint
pipe = self.pipeline_class.from_single_file(self.ckpt_path, config=self.repo_id, is_cosxl_edit=True)
assert pipe.is_cosxl_edit is True
| diffusers/tests/single_file/test_stable_diffusion_xl_instruct_pix2pix.py/0 | {
"file_path": "diffusers/tests/single_file/test_stable_diffusion_xl_instruct_pix2pix.py",
"repo_id": "diffusers",
"token_count": 685
} |
# coding=utf-8
# Copyright 2024 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
import requests
# Configuration
LIBRARY_NAME = "diffusers"
GITHUB_REPO = "huggingface/diffusers"
SLACK_WEBHOOK_URL = os.getenv("SLACK_WEBHOOK_URL")
def check_pypi_for_latest_release(library_name):
"""Check PyPI for the latest release of the library."""
response = requests.get(f"https://pypi.org/pypi/{library_name}/json")
if response.status_code == 200:
data = response.json()
return data["info"]["version"]
else:
print("Failed to fetch library details from PyPI.")
return None
def get_github_release_info(github_repo):
"""Fetch the latest release info from GitHub."""
url = f"https://api.github.com/repos/{github_repo}/releases/latest"
response = requests.get(url)
if response.status_code == 200:
data = response.json()
return {"tag_name": data["tag_name"], "url": data["html_url"], "release_time": data["published_at"]}
else:
print("Failed to fetch release info from GitHub.")
return None
def notify_slack(webhook_url, library_name, version, release_info):
"""Send a notification to a Slack channel."""
message = (
f"🚀 New release for {library_name} available: version **{version}** 🎉\n"
f"📜 Release Notes: {release_info['url']}\n"
f"⏱️ Release time: {release_info['release_time']}"
)
payload = {"text": message}
response = requests.post(webhook_url, json=payload)
if response.status_code == 200:
print("Notification sent to Slack successfully.")
else:
print("Failed to send notification to Slack.")
def main():
latest_version = check_pypi_for_latest_release(LIBRARY_NAME)
release_info = get_github_release_info(GITHUB_REPO)
parsed_version = release_info["tag_name"].replace("v", "")
if latest_version and release_info and latest_version == parsed_version:
notify_slack(SLACK_WEBHOOK_URL, LIBRARY_NAME, latest_version, release_info)
else:
print(f"{latest_version=}, {release_info=}, {parsed_version=}")
raise ValueError("There were some problems.")
if __name__ == "__main__":
main()
| diffusers/utils/notify_slack_about_release.py/0 | {
"file_path": "diffusers/utils/notify_slack_about_release.py",
"repo_id": "diffusers",
"token_count": 985
} |
"""
This scripts demonstrates how to evaluate a pretrained policy from the HuggingFace Hub or from your local
training outputs directory. In the latter case, you might want to run examples/3_train_policy.py first.
It requires the installation of the 'gym_pusht' simulation environment. Install it by running:
```bash
pip install -e ".[pusht]"`
```
"""
from pathlib import Path
import gym_pusht # noqa: F401
import gymnasium as gym
import imageio
import numpy
import torch
from lerobot.common.policies.diffusion.modeling_diffusion import DiffusionPolicy
# Create a directory to store the video of the evaluation
output_directory = Path("outputs/eval/example_pusht_diffusion")
output_directory.mkdir(parents=True, exist_ok=True)
# Select your device
device = "cuda"
# Provide the [hugging face repo id](https://huggingface.co/lerobot/diffusion_pusht):
pretrained_policy_path = "lerobot/diffusion_pusht"
# OR a path to a local outputs/train folder.
# pretrained_policy_path = Path("outputs/train/example_pusht_diffusion")
policy = DiffusionPolicy.from_pretrained(pretrained_policy_path, map_location=device)
# Initialize evaluation environment to render two observation types:
# an image of the scene and state/position of the agent. The environment
# also automatically stops running after 300 interactions/steps.
env = gym.make(
"gym_pusht/PushT-v0",
obs_type="pixels_agent_pos",
max_episode_steps=300,
)
# We can verify that the shapes of the features expected by the policy match the ones from the observations
# produced by the environment
print(policy.config.input_features)
print(env.observation_space)
# Similarly, we can check that the actions produced by the policy will match the actions expected by the
# environment
print(policy.config.output_features)
print(env.action_space)
# Reset the policy and environments to prepare for rollout
policy.reset()
numpy_observation, info = env.reset(seed=42)
# Prepare to collect every rewards and all the frames of the episode,
# from initial state to final state.
rewards = []
frames = []
# Render frame of the initial state
frames.append(env.render())
step = 0
done = False
while not done:
# Prepare observation for the policy running in Pytorch
state = torch.from_numpy(numpy_observation["agent_pos"])
image = torch.from_numpy(numpy_observation["pixels"])
# Convert to float32 with image from channel first in [0,255]
# to channel last in [0,1]
state = state.to(torch.float32)
image = image.to(torch.float32) / 255
image = image.permute(2, 0, 1)
# Send data tensors from CPU to GPU
state = state.to(device, non_blocking=True)
image = image.to(device, non_blocking=True)
# Add extra (empty) batch dimension, required to forward the policy
state = state.unsqueeze(0)
image = image.unsqueeze(0)
# Create the policy input dictionary
observation = {
"observation.state": state,
"observation.image": image,
}
# Predict the next action with respect to the current observation
with torch.inference_mode():
action = policy.select_action(observation)
# Prepare the action for the environment
numpy_action = action.squeeze(0).to("cpu").numpy()
# Step through the environment and receive a new observation
numpy_observation, reward, terminated, truncated, info = env.step(numpy_action)
print(f"{step=} {reward=} {terminated=}")
# Keep track of all the rewards and frames
rewards.append(reward)
frames.append(env.render())
# The rollout is considered done when the success state is reach (i.e. terminated is True),
# or the maximum number of iterations is reached (i.e. truncated is True)
done = terminated | truncated | done
step += 1
if terminated:
print("Success!")
else:
print("Failure!")
# Get the speed of environment (i.e. its number of frames per second).
fps = env.metadata["render_fps"]
# Encode all frames into a mp4 video.
video_path = output_directory / "rollout.mp4"
imageio.mimsave(str(video_path), numpy.stack(frames), fps=fps)
print(f"Video of the evaluation is available in '{video_path}'.")
| lerobot/examples/2_evaluate_pretrained_policy.py/0 | {
"file_path": "lerobot/examples/2_evaluate_pretrained_policy.py",
"repo_id": "lerobot",
"token_count": 1312
} |
#!/usr/bin/env python
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import logging
import os
import shutil
from functools import cached_property
from pathlib import Path
from typing import Callable
import datasets
import numpy as np
import PIL.Image
import torch
import torch.utils
from datasets import load_dataset
from huggingface_hub import create_repo, snapshot_download, upload_folder
from lerobot.common.datasets.compute_stats import aggregate_stats, compute_stats
from lerobot.common.datasets.image_writer import AsyncImageWriter, write_image
from lerobot.common.datasets.utils import (
DEFAULT_FEATURES,
DEFAULT_IMAGE_PATH,
EPISODES_PATH,
INFO_PATH,
STATS_PATH,
TASKS_PATH,
append_jsonlines,
check_delta_timestamps,
check_timestamps_sync,
check_version_compatibility,
create_branch,
create_empty_dataset_info,
create_lerobot_dataset_card,
get_delta_indices,
get_episode_data_index,
get_features_from_robot,
get_hf_features_from_features,
get_hub_safe_version,
hf_transform_to_torch,
load_episodes,
load_info,
load_stats,
load_tasks,
serialize_dict,
write_json,
write_parquet,
)
from lerobot.common.datasets.video_utils import (
VideoFrame,
decode_video_frames_torchvision,
encode_video_frames,
get_video_info,
)
from lerobot.common.robot_devices.robots.utils import Robot
# For maintainers, see lerobot/common/datasets/push_dataset_to_hub/CODEBASE_VERSION.md
CODEBASE_VERSION = "v2.0"
LEROBOT_HOME = Path(os.getenv("LEROBOT_HOME", "~/.cache/huggingface/lerobot")).expanduser()
class LeRobotDatasetMetadata:
def __init__(
self,
repo_id: str,
root: str | Path | None = None,
local_files_only: bool = False,
):
self.repo_id = repo_id
self.root = Path(root) if root is not None else LEROBOT_HOME / repo_id
self.local_files_only = local_files_only
# Load metadata
(self.root / "meta").mkdir(exist_ok=True, parents=True)
self.pull_from_repo(allow_patterns="meta/")
self.info = load_info(self.root)
self.stats = load_stats(self.root)
self.tasks = load_tasks(self.root)
self.episodes = load_episodes(self.root)
def pull_from_repo(
self,
allow_patterns: list[str] | str | None = None,
ignore_patterns: list[str] | str | None = None,
) -> None:
snapshot_download(
self.repo_id,
repo_type="dataset",
revision=self._hub_version,
local_dir=self.root,
allow_patterns=allow_patterns,
ignore_patterns=ignore_patterns,
local_files_only=self.local_files_only,
)
@cached_property
def _hub_version(self) -> str | None:
return None if self.local_files_only else get_hub_safe_version(self.repo_id, CODEBASE_VERSION)
@property
def _version(self) -> str:
"""Codebase version used to create this dataset."""
return self.info["codebase_version"]
def get_data_file_path(self, ep_index: int) -> Path:
ep_chunk = self.get_episode_chunk(ep_index)
fpath = self.data_path.format(episode_chunk=ep_chunk, episode_index=ep_index)
return Path(fpath)
def get_video_file_path(self, ep_index: int, vid_key: str) -> Path:
ep_chunk = self.get_episode_chunk(ep_index)
fpath = self.video_path.format(episode_chunk=ep_chunk, video_key=vid_key, episode_index=ep_index)
return Path(fpath)
def get_episode_chunk(self, ep_index: int) -> int:
return ep_index // self.chunks_size
@property
def data_path(self) -> str:
"""Formattable string for the parquet files."""
return self.info["data_path"]
@property
def video_path(self) -> str | None:
"""Formattable string for the video files."""
return self.info["video_path"]
@property
def robot_type(self) -> str | None:
"""Robot type used in recording this dataset."""
return self.info["robot_type"]
@property
def fps(self) -> int:
"""Frames per second used during data collection."""
return self.info["fps"]
@property
def features(self) -> dict[str, dict]:
"""All features contained in the dataset."""
return self.info["features"]
@property
def image_keys(self) -> list[str]:
"""Keys to access visual modalities stored as images."""
return [key for key, ft in self.features.items() if ft["dtype"] == "image"]
@property
def video_keys(self) -> list[str]:
"""Keys to access visual modalities stored as videos."""
return [key for key, ft in self.features.items() if ft["dtype"] == "video"]
@property
def camera_keys(self) -> list[str]:
"""Keys to access visual modalities (regardless of their storage method)."""
return [key for key, ft in self.features.items() if ft["dtype"] in ["video", "image"]]
@property
def names(self) -> dict[str, list | dict]:
"""Names of the various dimensions of vector modalities."""
return {key: ft["names"] for key, ft in self.features.items()}
@property
def shapes(self) -> dict:
"""Shapes for the different features."""
return {key: tuple(ft["shape"]) for key, ft in self.features.items()}
@property
def total_episodes(self) -> int:
"""Total number of episodes available."""
return self.info["total_episodes"]
@property
def total_frames(self) -> int:
"""Total number of frames saved in this dataset."""
return self.info["total_frames"]
@property
def total_tasks(self) -> int:
"""Total number of different tasks performed in this dataset."""
return self.info["total_tasks"]
@property
def total_chunks(self) -> int:
"""Total number of chunks (groups of episodes)."""
return self.info["total_chunks"]
@property
def chunks_size(self) -> int:
"""Max number of episodes per chunk."""
return self.info["chunks_size"]
@property
def task_to_task_index(self) -> dict:
return {task: task_idx for task_idx, task in self.tasks.items()}
def get_task_index(self, task: str) -> int:
"""
Given a task in natural language, returns its task_index if the task already exists in the dataset,
otherwise creates a new task_index.
"""
task_index = self.task_to_task_index.get(task, None)
return task_index if task_index is not None else self.total_tasks
def save_episode(self, episode_index: int, episode_length: int, task: str, task_index: int) -> None:
self.info["total_episodes"] += 1
self.info["total_frames"] += episode_length
if task_index not in self.tasks:
self.info["total_tasks"] += 1
self.tasks[task_index] = task
task_dict = {
"task_index": task_index,
"task": task,
}
append_jsonlines(task_dict, self.root / TASKS_PATH)
chunk = self.get_episode_chunk(episode_index)
if chunk >= self.total_chunks:
self.info["total_chunks"] += 1
self.info["splits"] = {"train": f"0:{self.info['total_episodes']}"}
self.info["total_videos"] += len(self.video_keys)
write_json(self.info, self.root / INFO_PATH)
episode_dict = {
"episode_index": episode_index,
"tasks": [task],
"length": episode_length,
}
self.episodes.append(episode_dict)
append_jsonlines(episode_dict, self.root / EPISODES_PATH)
# TODO(aliberts): refactor stats in save_episodes
# image_sampling = int(self.fps / 2) # sample 2 img/s for the stats
# ep_stats = compute_episode_stats(episode_buffer, self.features, episode_length, image_sampling=image_sampling)
# ep_stats = serialize_dict(ep_stats)
# append_jsonlines(ep_stats, self.root / STATS_PATH)
def write_video_info(self) -> None:
"""
Warning: this function writes info from first episode videos, implicitly assuming that all videos have
been encoded the same way. Also, this means it assumes the first episode exists.
"""
for key in self.video_keys:
if not self.features[key].get("info", None):
video_path = self.root / self.get_video_file_path(ep_index=0, vid_key=key)
self.info["features"][key]["info"] = get_video_info(video_path)
write_json(self.info, self.root / INFO_PATH)
def __repr__(self):
feature_keys = list(self.features)
return (
f"{self.__class__.__name__}({{\n"
f" Repository ID: '{self.repo_id}',\n"
f" Total episodes: '{self.total_episodes}',\n"
f" Total frames: '{self.total_frames}',\n"
f" Features: '{feature_keys}',\n"
"})',\n"
)
@classmethod
def create(
cls,
repo_id: str,
fps: int,
root: str | Path | None = None,
robot: Robot | None = None,
robot_type: str | None = None,
features: dict | None = None,
use_videos: bool = True,
) -> "LeRobotDatasetMetadata":
"""Creates metadata for a LeRobotDataset."""
obj = cls.__new__(cls)
obj.repo_id = repo_id
obj.root = Path(root) if root is not None else LEROBOT_HOME / repo_id
obj.root.mkdir(parents=True, exist_ok=False)
if robot is not None:
features = get_features_from_robot(robot, use_videos)
robot_type = robot.robot_type
if not all(cam.fps == fps for cam in robot.cameras.values()):
logging.warning(
f"Some cameras in your {robot.robot_type} robot don't have an fps matching the fps of your dataset."
"In this case, frames from lower fps cameras will be repeated to fill in the blanks."
)
elif features is None:
raise ValueError(
"Dataset features must either come from a Robot or explicitly passed upon creation."
)
else:
# TODO(aliberts, rcadene): implement sanity check for features
# check if none of the features contains a "/" in their names,
# as this would break the dict flattening in the stats computation, which uses '/' as separator
for key in features:
if "/" in key:
raise ValueError(f"Feature names should not contain '/'. Found '/' in feature '{key}'.")
features = {**features, **DEFAULT_FEATURES}
obj.tasks, obj.stats, obj.episodes = {}, {}, []
obj.info = create_empty_dataset_info(CODEBASE_VERSION, fps, robot_type, features, use_videos)
if len(obj.video_keys) > 0 and not use_videos:
raise ValueError()
write_json(obj.info, obj.root / INFO_PATH)
obj.local_files_only = True
return obj
class LeRobotDataset(torch.utils.data.Dataset):
def __init__(
self,
repo_id: str,
root: str | Path | None = None,
episodes: list[int] | None = None,
image_transforms: Callable | None = None,
delta_timestamps: dict[list[float]] | None = None,
tolerance_s: float = 1e-4,
download_videos: bool = True,
local_files_only: bool = False,
video_backend: str | None = None,
):
"""
2 modes are available for instantiating this class, depending on 2 different use cases:
1. Your dataset already exists:
- On your local disk in the 'root' folder. This is typically the case when you recorded your
dataset locally and you may or may not have pushed it to the hub yet. Instantiating this class
with 'root' will load your dataset directly from disk. This can happen while you're offline (no
internet connection), in that case, use local_files_only=True.
- On the Hugging Face Hub at the address https://huggingface.co/datasets/{repo_id} and not on
your local disk in the 'root' folder. Instantiating this class with this 'repo_id' will download
the dataset from that address and load it, pending your dataset is compliant with
codebase_version v2.0. If your dataset has been created before this new format, you will be
prompted to convert it using our conversion script from v1.6 to v2.0, which you can find at
lerobot/common/datasets/v2/convert_dataset_v1_to_v2.py.
2. Your dataset doesn't already exists (either on local disk or on the Hub): you can create an empty
LeRobotDataset with the 'create' classmethod. This can be used for recording a dataset or port an
existing dataset to the LeRobotDataset format.
In terms of files, LeRobotDataset encapsulates 3 main things:
- metadata:
- info contains various information about the dataset like shapes, keys, fps etc.
- stats stores the dataset statistics of the different modalities for normalization
- tasks contains the prompts for each task of the dataset, which can be used for
task-conditionned training.
- hf_dataset (from datasets.Dataset), which will read any values from parquet files.
- videos (optional) from which frames are loaded to be synchronous with data from parquet files.
A typical LeRobotDataset looks like this from its root path:
.
├── data
│ ├── chunk-000
│ │ ├── episode_000000.parquet
│ │ ├── episode_000001.parquet
│ │ ├── episode_000002.parquet
│ │ └── ...
│ ├── chunk-001
│ │ ├── episode_001000.parquet
│ │ ├── episode_001001.parquet
│ │ ├── episode_001002.parquet
│ │ └── ...
│ └── ...
├── meta
│ ├── episodes.jsonl
│ ├── info.json
│ ├── stats.json
│ └── tasks.jsonl
└── videos
├── chunk-000
│ ├── observation.images.laptop
│ │ ├── episode_000000.mp4
│ │ ├── episode_000001.mp4
│ │ ├── episode_000002.mp4
│ │ └── ...
│ ├── observation.images.phone
│ │ ├── episode_000000.mp4
│ │ ├── episode_000001.mp4
│ │ ├── episode_000002.mp4
│ │ └── ...
├── chunk-001
└── ...
Note that this file-based structure is designed to be as versatile as possible. The files are split by
episodes which allows a more granular control over which episodes one wants to use and download. The
structure of the dataset is entirely described in the info.json file, which can be easily downloaded
or viewed directly on the hub before downloading any actual data. The type of files used are very
simple and do not need complex tools to be read, it only uses .parquet, .json and .mp4 files (and .md
for the README).
Args:
repo_id (str): This is the repo id that will be used to fetch the dataset. Locally, the dataset
will be stored under root/repo_id.
root (Path | None, optional): Local directory to use for downloading/writing files. You can also
set the LEROBOT_HOME environment variable to point to a different location. Defaults to
'~/.cache/huggingface/lerobot'.
episodes (list[int] | None, optional): If specified, this will only load episodes specified by
their episode_index in this list. Defaults to None.
image_transforms (Callable | None, optional): You can pass standard v2 image transforms from
torchvision.transforms.v2 here which will be applied to visual modalities (whether they come
from videos or images). Defaults to None.
delta_timestamps (dict[list[float]] | None, optional): _description_. Defaults to None.
tolerance_s (float, optional): Tolerance in seconds used to ensure data timestamps are actually in
sync with the fps value. It is used at the init of the dataset to make sure that each
timestamps is separated to the next by 1/fps +/- tolerance_s. This also applies to frames
decoded from video files. It is also used to check that `delta_timestamps` (when provided) are
multiples of 1/fps. Defaults to 1e-4.
download_videos (bool, optional): Flag to download the videos. Note that when set to True but the
video files are already present on local disk, they won't be downloaded again. Defaults to
True.
local_files_only (bool, optional): Flag to use local files only. If True, no requests to the hub
will be made. Defaults to False.
video_backend (str | None, optional): Video backend to use for decoding videos. There is currently
a single option which is the pyav decoder used by Torchvision. Defaults to pyav.
"""
super().__init__()
self.repo_id = repo_id
self.root = Path(root) if root else LEROBOT_HOME / repo_id
self.image_transforms = image_transforms
self.delta_timestamps = delta_timestamps
self.episodes = episodes
self.tolerance_s = tolerance_s
self.video_backend = video_backend if video_backend else "pyav"
self.delta_indices = None
self.local_files_only = local_files_only
# Unused attributes
self.image_writer = None
self.episode_buffer = None
self.root.mkdir(exist_ok=True, parents=True)
# Load metadata
self.meta = LeRobotDatasetMetadata(self.repo_id, self.root, self.local_files_only)
# Check version
check_version_compatibility(self.repo_id, self.meta._version, CODEBASE_VERSION)
# Load actual data
self.download_episodes(download_videos)
self.hf_dataset = self.load_hf_dataset()
self.episode_data_index = get_episode_data_index(self.meta.episodes, self.episodes)
# Check timestamps
check_timestamps_sync(self.hf_dataset, self.episode_data_index, self.fps, self.tolerance_s)
# Setup delta_indices
if self.delta_timestamps is not None:
check_delta_timestamps(self.delta_timestamps, self.fps, self.tolerance_s)
self.delta_indices = get_delta_indices(self.delta_timestamps, self.fps)
# Available stats implies all videos have been encoded and dataset is iterable
self.consolidated = self.meta.stats is not None
def push_to_hub(
self,
tags: list | None = None,
license: str | None = "apache-2.0",
push_videos: bool = True,
private: bool = False,
**card_kwargs,
) -> None:
if not self.consolidated:
logging.warning(
"You are trying to upload to the hub a LeRobotDataset that has not been consolidated yet. "
"Consolidating first."
)
self.consolidate()
ignore_patterns = ["images/"]
if not push_videos:
ignore_patterns.append("videos/")
create_repo(
repo_id=self.repo_id,
private=private,
repo_type="dataset",
exist_ok=True,
)
upload_folder(
repo_id=self.repo_id,
folder_path=self.root,
repo_type="dataset",
ignore_patterns=ignore_patterns,
)
card = create_lerobot_dataset_card(
tags=tags, dataset_info=self.meta.info, license=license, **card_kwargs
)
card.push_to_hub(repo_id=self.repo_id, repo_type="dataset")
create_branch(repo_id=self.repo_id, branch=CODEBASE_VERSION, repo_type="dataset")
def pull_from_repo(
self,
allow_patterns: list[str] | str | None = None,
ignore_patterns: list[str] | str | None = None,
) -> None:
snapshot_download(
self.repo_id,
repo_type="dataset",
revision=self.meta._hub_version,
local_dir=self.root,
allow_patterns=allow_patterns,
ignore_patterns=ignore_patterns,
local_files_only=self.local_files_only,
)
def download_episodes(self, download_videos: bool = True) -> None:
"""Downloads the dataset from the given 'repo_id' at the provided version. If 'episodes' is given, this
will only download those episodes (selected by their episode_index). If 'episodes' is None, the whole
dataset will be downloaded. Thanks to the behavior of snapshot_download, if the files are already present
in 'local_dir', they won't be downloaded again.
"""
# TODO(rcadene, aliberts): implement faster transfer
# https://huggingface.co/docs/huggingface_hub/en/guides/download#faster-downloads
files = None
ignore_patterns = None if download_videos else "videos/"
if self.episodes is not None:
files = [str(self.meta.get_data_file_path(ep_idx)) for ep_idx in self.episodes]
if len(self.meta.video_keys) > 0 and download_videos:
video_files = [
str(self.meta.get_video_file_path(ep_idx, vid_key))
for vid_key in self.meta.video_keys
for ep_idx in self.episodes
]
files += video_files
self.pull_from_repo(allow_patterns=files, ignore_patterns=ignore_patterns)
def load_hf_dataset(self) -> datasets.Dataset:
"""hf_dataset contains all the observations, states, actions, rewards, etc."""
if self.episodes is None:
path = str(self.root / "data")
hf_dataset = load_dataset("parquet", data_dir=path, split="train")
else:
files = [str(self.root / self.meta.get_data_file_path(ep_idx)) for ep_idx in self.episodes]
hf_dataset = load_dataset("parquet", data_files=files, split="train")
# TODO(aliberts): hf_dataset.set_format("torch")
hf_dataset.set_transform(hf_transform_to_torch)
return hf_dataset
@property
def fps(self) -> int:
"""Frames per second used during data collection."""
return self.meta.fps
@property
def num_frames(self) -> int:
"""Number of frames in selected episodes."""
return len(self.hf_dataset) if self.hf_dataset is not None else self.meta.total_frames
@property
def num_episodes(self) -> int:
"""Number of episodes selected."""
return len(self.episodes) if self.episodes is not None else self.meta.total_episodes
@property
def features(self) -> dict[str, dict]:
return self.meta.features
@property
def hf_features(self) -> datasets.Features:
"""Features of the hf_dataset."""
if self.hf_dataset is not None:
return self.hf_dataset.features
else:
return get_hf_features_from_features(self.features)
def _get_query_indices(self, idx: int, ep_idx: int) -> tuple[dict[str, list[int | bool]]]:
ep_start = self.episode_data_index["from"][ep_idx]
ep_end = self.episode_data_index["to"][ep_idx]
query_indices = {
key: [max(ep_start.item(), min(ep_end.item() - 1, idx + delta)) for delta in delta_idx]
for key, delta_idx in self.delta_indices.items()
}
padding = { # Pad values outside of current episode range
f"{key}_is_pad": torch.BoolTensor(
[(idx + delta < ep_start.item()) | (idx + delta >= ep_end.item()) for delta in delta_idx]
)
for key, delta_idx in self.delta_indices.items()
}
return query_indices, padding
def _get_query_timestamps(
self,
current_ts: float,
query_indices: dict[str, list[int]] | None = None,
) -> dict[str, list[float]]:
query_timestamps = {}
for key in self.meta.video_keys:
if query_indices is not None and key in query_indices:
timestamps = self.hf_dataset.select(query_indices[key])["timestamp"]
query_timestamps[key] = torch.stack(timestamps).tolist()
else:
query_timestamps[key] = [current_ts]
return query_timestamps
def _query_hf_dataset(self, query_indices: dict[str, list[int]]) -> dict:
return {
key: torch.stack(self.hf_dataset.select(q_idx)[key])
for key, q_idx in query_indices.items()
if key not in self.meta.video_keys
}
def _query_videos(self, query_timestamps: dict[str, list[float]], ep_idx: int) -> dict:
"""Note: When using data workers (e.g. DataLoader with num_workers>0), do not call this function
in the main process (e.g. by using a second Dataloader with num_workers=0). It will result in a
Segmentation Fault. This probably happens because a memory reference to the video loader is created in
the main process and a subprocess fails to access it.
"""
item = {}
for vid_key, query_ts in query_timestamps.items():
video_path = self.root / self.meta.get_video_file_path(ep_idx, vid_key)
frames = decode_video_frames_torchvision(
video_path, query_ts, self.tolerance_s, self.video_backend
)
item[vid_key] = frames.squeeze(0)
return item
def _add_padding_keys(self, item: dict, padding: dict[str, list[bool]]) -> dict:
for key, val in padding.items():
item[key] = torch.BoolTensor(val)
return item
def __len__(self):
return self.num_frames
def __getitem__(self, idx) -> dict:
item = self.hf_dataset[idx]
ep_idx = item["episode_index"].item()
query_indices = None
if self.delta_indices is not None:
current_ep_idx = self.episodes.index(ep_idx) if self.episodes is not None else ep_idx
query_indices, padding = self._get_query_indices(idx, current_ep_idx)
query_result = self._query_hf_dataset(query_indices)
item = {**item, **padding}
for key, val in query_result.items():
item[key] = val
if len(self.meta.video_keys) > 0:
current_ts = item["timestamp"].item()
query_timestamps = self._get_query_timestamps(current_ts, query_indices)
video_frames = self._query_videos(query_timestamps, ep_idx)
item = {**video_frames, **item}
if self.image_transforms is not None:
image_keys = self.meta.camera_keys
for cam in image_keys:
item[cam] = self.image_transforms(item[cam])
# Add task as a string
task_idx = item["task_index"].item()
item["task"] = self.meta.tasks[task_idx]
return item
def __repr__(self):
feature_keys = list(self.features)
return (
f"{self.__class__.__name__}({{\n"
f" Repository ID: '{self.repo_id}',\n"
f" Number of selected episodes: '{self.num_episodes}',\n"
f" Number of selected samples: '{self.num_frames}',\n"
f" Features: '{feature_keys}',\n"
"})',\n"
)
def create_episode_buffer(self, episode_index: int | None = None) -> dict:
current_ep_idx = self.meta.total_episodes if episode_index is None else episode_index
return {
"size": 0,
**{key: current_ep_idx if key == "episode_index" else [] for key in self.features},
}
def _get_image_file_path(self, episode_index: int, image_key: str, frame_index: int) -> Path:
fpath = DEFAULT_IMAGE_PATH.format(
image_key=image_key, episode_index=episode_index, frame_index=frame_index
)
return self.root / fpath
def _save_image(self, image: torch.Tensor | np.ndarray | PIL.Image.Image, fpath: Path) -> None:
if self.image_writer is None:
if isinstance(image, torch.Tensor):
image = image.cpu().numpy()
write_image(image, fpath)
else:
self.image_writer.save_image(image=image, fpath=fpath)
def add_frame(self, frame: dict) -> None:
"""
This function only adds the frame to the episode_buffer. Apart from images — which are written in a
temporary directory — nothing is written to disk. To save those frames, the 'save_episode()' method
then needs to be called.
"""
# TODO(aliberts, rcadene): Add sanity check for the input, check it's numpy or torch,
# check the dtype and shape matches, etc.
if self.episode_buffer is None:
self.episode_buffer = self.create_episode_buffer()
frame_index = self.episode_buffer["size"]
timestamp = frame.pop("timestamp") if "timestamp" in frame else frame_index / self.fps
self.episode_buffer["frame_index"].append(frame_index)
self.episode_buffer["timestamp"].append(timestamp)
for key in frame:
if key not in self.features:
raise ValueError(key)
if self.features[key]["dtype"] not in ["image", "video"]:
item = frame[key].numpy() if isinstance(frame[key], torch.Tensor) else frame[key]
self.episode_buffer[key].append(item)
elif self.features[key]["dtype"] in ["image", "video"]:
img_path = self._get_image_file_path(
episode_index=self.episode_buffer["episode_index"], image_key=key, frame_index=frame_index
)
if frame_index == 0:
img_path.parent.mkdir(parents=True, exist_ok=True)
self._save_image(frame[key], img_path)
self.episode_buffer[key].append(str(img_path))
self.episode_buffer["size"] += 1
def save_episode(self, task: str, encode_videos: bool = True, episode_data: dict | None = None) -> None:
"""
This will save to disk the current episode in self.episode_buffer. Note that since it affects files on
disk, it sets self.consolidated to False to ensure proper consolidation later on before uploading to
the hub.
Use 'encode_videos' if you want to encode videos during the saving of this episode. Otherwise,
you can do it later with dataset.consolidate(). This is to give more flexibility on when to spend
time for video encoding.
"""
if not episode_data:
episode_buffer = self.episode_buffer
episode_length = episode_buffer.pop("size")
episode_index = episode_buffer["episode_index"]
if episode_index != self.meta.total_episodes:
# TODO(aliberts): Add option to use existing episode_index
raise NotImplementedError(
"You might have manually provided the episode_buffer with an episode_index that doesn't "
"match the total number of episodes in the dataset. This is not supported for now."
)
if episode_length == 0:
raise ValueError(
"You must add one or several frames with `add_frame` before calling `add_episode`."
)
task_index = self.meta.get_task_index(task)
if not set(episode_buffer.keys()) == set(self.features):
raise ValueError()
for key, ft in self.features.items():
if key == "index":
episode_buffer[key] = np.arange(
self.meta.total_frames, self.meta.total_frames + episode_length
)
elif key == "episode_index":
episode_buffer[key] = np.full((episode_length,), episode_index)
elif key == "task_index":
episode_buffer[key] = np.full((episode_length,), task_index)
elif ft["dtype"] in ["image", "video"]:
continue
elif len(ft["shape"]) == 1 and ft["shape"][0] == 1:
episode_buffer[key] = np.array(episode_buffer[key], dtype=ft["dtype"])
elif len(ft["shape"]) == 1 and ft["shape"][0] > 1:
episode_buffer[key] = np.stack(episode_buffer[key])
else:
raise ValueError(key)
self._wait_image_writer()
self._save_episode_table(episode_buffer, episode_index)
self.meta.save_episode(episode_index, episode_length, task, task_index)
if encode_videos and len(self.meta.video_keys) > 0:
video_paths = self.encode_episode_videos(episode_index)
for key in self.meta.video_keys:
episode_buffer[key] = video_paths[key]
if not episode_data: # Reset the buffer
self.episode_buffer = self.create_episode_buffer()
self.consolidated = False
def _save_episode_table(self, episode_buffer: dict, episode_index: int) -> None:
episode_dict = {key: episode_buffer[key] for key in self.hf_features}
ep_dataset = datasets.Dataset.from_dict(episode_dict, features=self.hf_features, split="train")
ep_data_path = self.root / self.meta.get_data_file_path(ep_index=episode_index)
ep_data_path.parent.mkdir(parents=True, exist_ok=True)
write_parquet(ep_dataset, ep_data_path)
def clear_episode_buffer(self) -> None:
episode_index = self.episode_buffer["episode_index"]
if self.image_writer is not None:
for cam_key in self.meta.camera_keys:
img_dir = self._get_image_file_path(
episode_index=episode_index, image_key=cam_key, frame_index=0
).parent
if img_dir.is_dir():
shutil.rmtree(img_dir)
# Reset the buffer
self.episode_buffer = self.create_episode_buffer()
def start_image_writer(self, num_processes: int = 0, num_threads: int = 4) -> None:
if isinstance(self.image_writer, AsyncImageWriter):
logging.warning(
"You are starting a new AsyncImageWriter that is replacing an already existing one in the dataset."
)
self.image_writer = AsyncImageWriter(
num_processes=num_processes,
num_threads=num_threads,
)
def stop_image_writer(self) -> None:
"""
Whenever wrapping this dataset inside a parallelized DataLoader, this needs to be called first to
remove the image_writer in order for the LeRobotDataset object to be pickleable and parallelized.
"""
if self.image_writer is not None:
self.image_writer.stop()
self.image_writer = None
def _wait_image_writer(self) -> None:
"""Wait for asynchronous image writer to finish."""
if self.image_writer is not None:
self.image_writer.wait_until_done()
def encode_videos(self) -> None:
"""
Use ffmpeg to convert frames stored as png into mp4 videos.
Note: `encode_video_frames` is a blocking call. Making it asynchronous shouldn't speedup encoding,
since video encoding with ffmpeg is already using multithreading.
"""
for ep_idx in range(self.meta.total_episodes):
self.encode_episode_videos(ep_idx)
def encode_episode_videos(self, episode_index: int) -> dict:
"""
Use ffmpeg to convert frames stored as png into mp4 videos.
Note: `encode_video_frames` is a blocking call. Making it asynchronous shouldn't speedup encoding,
since video encoding with ffmpeg is already using multithreading.
"""
video_paths = {}
for key in self.meta.video_keys:
video_path = self.root / self.meta.get_video_file_path(episode_index, key)
video_paths[key] = str(video_path)
if video_path.is_file():
# Skip if video is already encoded. Could be the case when resuming data recording.
continue
img_dir = self._get_image_file_path(
episode_index=episode_index, image_key=key, frame_index=0
).parent
encode_video_frames(img_dir, video_path, self.fps, overwrite=True)
return video_paths
def consolidate(self, run_compute_stats: bool = True, keep_image_files: bool = False) -> None:
self.hf_dataset = self.load_hf_dataset()
self.episode_data_index = get_episode_data_index(self.meta.episodes, self.episodes)
check_timestamps_sync(self.hf_dataset, self.episode_data_index, self.fps, self.tolerance_s)
if len(self.meta.video_keys) > 0:
self.encode_videos()
self.meta.write_video_info()
if not keep_image_files:
img_dir = self.root / "images"
if img_dir.is_dir():
shutil.rmtree(self.root / "images")
video_files = list(self.root.rglob("*.mp4"))
assert len(video_files) == self.num_episodes * len(self.meta.video_keys)
parquet_files = list(self.root.rglob("*.parquet"))
assert len(parquet_files) == self.num_episodes
if run_compute_stats:
self.stop_image_writer()
# TODO(aliberts): refactor stats in save_episodes
self.meta.stats = compute_stats(self)
serialized_stats = serialize_dict(self.meta.stats)
write_json(serialized_stats, self.root / STATS_PATH)
self.consolidated = True
else:
logging.warning(
"Skipping computation of the dataset statistics, dataset is not fully consolidated."
)
@classmethod
def create(
cls,
repo_id: str,
fps: int,
root: str | Path | None = None,
robot: Robot | None = None,
robot_type: str | None = None,
features: dict | None = None,
use_videos: bool = True,
tolerance_s: float = 1e-4,
image_writer_processes: int = 0,
image_writer_threads: int = 0,
video_backend: str | None = None,
) -> "LeRobotDataset":
"""Create a LeRobot Dataset from scratch in order to record data."""
obj = cls.__new__(cls)
obj.meta = LeRobotDatasetMetadata.create(
repo_id=repo_id,
fps=fps,
root=root,
robot=robot,
robot_type=robot_type,
features=features,
use_videos=use_videos,
)
obj.repo_id = obj.meta.repo_id
obj.root = obj.meta.root
obj.local_files_only = obj.meta.local_files_only
obj.tolerance_s = tolerance_s
obj.image_writer = None
if image_writer_processes or image_writer_threads:
obj.start_image_writer(image_writer_processes, image_writer_threads)
# TODO(aliberts, rcadene, alexander-soare): Merge this with OnlineBuffer/DataBuffer
obj.episode_buffer = obj.create_episode_buffer()
# This bool indicates that the current LeRobotDataset instance is in sync with the files on disk. It
# is used to know when certain operations are need (for instance, computing dataset statistics). In
# order to be able to push the dataset to the hub, it needs to be consolidated first by calling
# self.consolidate().
obj.consolidated = True
obj.episodes = None
obj.hf_dataset = None
obj.image_transforms = None
obj.delta_timestamps = None
obj.delta_indices = None
obj.episode_data_index = None
obj.video_backend = video_backend if video_backend is not None else "pyav"
return obj
class MultiLeRobotDataset(torch.utils.data.Dataset):
"""A dataset consisting of multiple underlying `LeRobotDataset`s.
The underlying `LeRobotDataset`s are effectively concatenated, and this class adopts much of the API
structure of `LeRobotDataset`.
"""
def __init__(
self,
repo_ids: list[str],
root: str | Path | None = None,
episodes: dict | None = None,
image_transforms: Callable | None = None,
delta_timestamps: dict[list[float]] | None = None,
tolerances_s: dict | None = None,
download_videos: bool = True,
local_files_only: bool = False,
video_backend: str | None = None,
):
super().__init__()
self.repo_ids = repo_ids
self.root = Path(root) if root else LEROBOT_HOME
self.tolerances_s = tolerances_s if tolerances_s else {repo_id: 1e-4 for repo_id in repo_ids}
# Construct the underlying datasets passing everything but `transform` and `delta_timestamps` which
# are handled by this class.
self._datasets = [
LeRobotDataset(
repo_id,
root=self.root / repo_id,
episodes=episodes[repo_id] if episodes else None,
image_transforms=image_transforms,
delta_timestamps=delta_timestamps,
tolerance_s=self.tolerances_s[repo_id],
download_videos=download_videos,
local_files_only=local_files_only,
video_backend=video_backend,
)
for repo_id in repo_ids
]
# Disable any data keys that are not common across all of the datasets. Note: we may relax this
# restriction in future iterations of this class. For now, this is necessary at least for being able
# to use PyTorch's default DataLoader collate function.
self.disabled_features = set()
intersection_features = set(self._datasets[0].features)
for ds in self._datasets:
intersection_features.intersection_update(ds.features)
if len(intersection_features) == 0:
raise RuntimeError(
"Multiple datasets were provided but they had no keys common to all of them. "
"The multi-dataset functionality currently only keeps common keys."
)
for repo_id, ds in zip(self.repo_ids, self._datasets, strict=True):
extra_keys = set(ds.features).difference(intersection_features)
logging.warning(
f"keys {extra_keys} of {repo_id} were disabled as they are not contained in all the "
"other datasets."
)
self.disabled_features.update(extra_keys)
self.image_transforms = image_transforms
self.delta_timestamps = delta_timestamps
self.stats = aggregate_stats(self._datasets)
@property
def repo_id_to_index(self):
"""Return a mapping from dataset repo_id to a dataset index automatically created by this class.
This index is incorporated as a data key in the dictionary returned by `__getitem__`.
"""
return {repo_id: i for i, repo_id in enumerate(self.repo_ids)}
@property
def repo_index_to_id(self):
"""Return the inverse mapping if repo_id_to_index."""
return {v: k for k, v in self.repo_id_to_index}
@property
def fps(self) -> int:
"""Frames per second used during data collection.
NOTE: Fow now, this relies on a check in __init__ to make sure all sub-datasets have the same info.
"""
return self._datasets[0].meta.info["fps"]
@property
def video(self) -> bool:
"""Returns True if this dataset loads video frames from mp4 files.
Returns False if it only loads images from png files.
NOTE: Fow now, this relies on a check in __init__ to make sure all sub-datasets have the same info.
"""
return self._datasets[0].meta.info.get("video", False)
@property
def features(self) -> datasets.Features:
features = {}
for dataset in self._datasets:
features.update({k: v for k, v in dataset.hf_features.items() if k not in self.disabled_features})
return features
@property
def camera_keys(self) -> list[str]:
"""Keys to access image and video stream from cameras."""
keys = []
for key, feats in self.features.items():
if isinstance(feats, (datasets.Image, VideoFrame)):
keys.append(key)
return keys
@property
def video_frame_keys(self) -> list[str]:
"""Keys to access video frames that requires to be decoded into images.
Note: It is empty if the dataset contains images only,
or equal to `self.cameras` if the dataset contains videos only,
or can even be a subset of `self.cameras` in a case of a mixed image/video dataset.
"""
video_frame_keys = []
for key, feats in self.features.items():
if isinstance(feats, VideoFrame):
video_frame_keys.append(key)
return video_frame_keys
@property
def num_frames(self) -> int:
"""Number of samples/frames."""
return sum(d.num_frames for d in self._datasets)
@property
def num_episodes(self) -> int:
"""Number of episodes."""
return sum(d.num_episodes for d in self._datasets)
@property
def tolerance_s(self) -> float:
"""Tolerance in seconds used to discard loaded frames when their timestamps
are not close enough from the requested frames. It is only used when `delta_timestamps`
is provided or when loading video frames from mp4 files.
"""
# 1e-4 to account for possible numerical error
return 1 / self.fps - 1e-4
def __len__(self):
return self.num_frames
def __getitem__(self, idx: int) -> dict[str, torch.Tensor]:
if idx >= len(self):
raise IndexError(f"Index {idx} out of bounds.")
# Determine which dataset to get an item from based on the index.
start_idx = 0
dataset_idx = 0
for dataset in self._datasets:
if idx >= start_idx + dataset.num_frames:
start_idx += dataset.num_frames
dataset_idx += 1
continue
break
else:
raise AssertionError("We expect the loop to break out as long as the index is within bounds.")
item = self._datasets[dataset_idx][idx - start_idx]
item["dataset_index"] = torch.tensor(dataset_idx)
for data_key in self.disabled_features:
if data_key in item:
del item[data_key]
return item
def __repr__(self):
return (
f"{self.__class__.__name__}(\n"
f" Repository IDs: '{self.repo_ids}',\n"
f" Number of Samples: {self.num_frames},\n"
f" Number of Episodes: {self.num_episodes},\n"
f" Type: {'video (.mp4)' if self.video else 'image (.png)'},\n"
f" Recorded Frames per Second: {self.fps},\n"
f" Camera Keys: {self.camera_keys},\n"
f" Video Frame Keys: {self.video_frame_keys if self.video else 'N/A'},\n"
f" Transformations: {self.image_transforms},\n"
f")"
)
| lerobot/lerobot/common/datasets/lerobot_dataset.py/0 | {
"file_path": "lerobot/lerobot/common/datasets/lerobot_dataset.py",
"repo_id": "lerobot",
"token_count": 20806
} |
#!/usr/bin/env python
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
Contains utilities to process raw data format of HDF5 files like in: https://github.com/tonyzhaozh/act
"""
import gc
import shutil
from pathlib import Path
import h5py
import numpy as np
import torch
import tqdm
from datasets import Dataset, Features, Image, Sequence, Value
from PIL import Image as PILImage
from lerobot.common.datasets.lerobot_dataset import CODEBASE_VERSION
from lerobot.common.datasets.push_dataset_to_hub.utils import (
calculate_episode_data_index,
concatenate_episodes,
get_default_encoding,
save_images_concurrently,
)
from lerobot.common.datasets.utils import (
hf_transform_to_torch,
)
from lerobot.common.datasets.video_utils import VideoFrame, encode_video_frames
def get_cameras(hdf5_data):
# ignore depth channel, not currently handled
# TODO(rcadene): add depth
rgb_cameras = [key for key in hdf5_data["/observations/images"].keys() if "depth" not in key] # noqa: SIM118
return rgb_cameras
def check_format(raw_dir) -> bool:
# only frames from simulation are uncompressed
compressed_images = "sim" not in raw_dir.name
hdf5_paths = list(raw_dir.glob("episode_*.hdf5"))
assert len(hdf5_paths) != 0
for hdf5_path in hdf5_paths:
with h5py.File(hdf5_path, "r") as data:
assert "/action" in data
assert "/observations/qpos" in data
assert data["/action"].ndim == 2
assert data["/observations/qpos"].ndim == 2
num_frames = data["/action"].shape[0]
assert num_frames == data["/observations/qpos"].shape[0]
for camera in get_cameras(data):
assert num_frames == data[f"/observations/images/{camera}"].shape[0]
if compressed_images:
assert data[f"/observations/images/{camera}"].ndim == 2
else:
assert data[f"/observations/images/{camera}"].ndim == 4
b, h, w, c = data[f"/observations/images/{camera}"].shape
assert c < h and c < w, f"Expect (h,w,c) image format but ({h=},{w=},{c=}) provided."
def load_from_raw(
raw_dir: Path,
videos_dir: Path,
fps: int,
video: bool,
episodes: list[int] | None = None,
encoding: dict | None = None,
):
# only frames from simulation are uncompressed
compressed_images = "sim" not in raw_dir.name
hdf5_files = sorted(raw_dir.glob("episode_*.hdf5"))
num_episodes = len(hdf5_files)
ep_dicts = []
ep_ids = episodes if episodes else range(num_episodes)
for ep_idx in tqdm.tqdm(ep_ids):
ep_path = hdf5_files[ep_idx]
with h5py.File(ep_path, "r") as ep:
num_frames = ep["/action"].shape[0]
# last step of demonstration is considered done
done = torch.zeros(num_frames, dtype=torch.bool)
done[-1] = True
state = torch.from_numpy(ep["/observations/qpos"][:])
action = torch.from_numpy(ep["/action"][:])
if "/observations/qvel" in ep:
velocity = torch.from_numpy(ep["/observations/qvel"][:])
if "/observations/effort" in ep:
effort = torch.from_numpy(ep["/observations/effort"][:])
ep_dict = {}
for camera in get_cameras(ep):
img_key = f"observation.images.{camera}"
if compressed_images:
import cv2
# load one compressed image after the other in RAM and uncompress
imgs_array = []
for data in ep[f"/observations/images/{camera}"]:
imgs_array.append(cv2.imdecode(data, 1))
imgs_array = np.array(imgs_array)
else:
# load all images in RAM
imgs_array = ep[f"/observations/images/{camera}"][:]
if video:
# save png images in temporary directory
tmp_imgs_dir = videos_dir / "tmp_images"
save_images_concurrently(imgs_array, tmp_imgs_dir)
# encode images to a mp4 video
fname = f"{img_key}_episode_{ep_idx:06d}.mp4"
video_path = videos_dir / fname
encode_video_frames(tmp_imgs_dir, video_path, fps, **(encoding or {}))
# clean temporary images directory
shutil.rmtree(tmp_imgs_dir)
# store the reference to the video frame
ep_dict[img_key] = [
{"path": f"videos/{fname}", "timestamp": i / fps} for i in range(num_frames)
]
else:
ep_dict[img_key] = [PILImage.fromarray(x) for x in imgs_array]
ep_dict["observation.state"] = state
if "/observations/velocity" in ep:
ep_dict["observation.velocity"] = velocity
if "/observations/effort" in ep:
ep_dict["observation.effort"] = effort
ep_dict["action"] = action
ep_dict["episode_index"] = torch.tensor([ep_idx] * num_frames)
ep_dict["frame_index"] = torch.arange(0, num_frames, 1)
ep_dict["timestamp"] = torch.arange(0, num_frames, 1) / fps
ep_dict["next.done"] = done
# TODO(rcadene): add reward and success by computing them in sim
assert isinstance(ep_idx, int)
ep_dicts.append(ep_dict)
gc.collect()
data_dict = concatenate_episodes(ep_dicts)
total_frames = data_dict["frame_index"].shape[0]
data_dict["index"] = torch.arange(0, total_frames, 1)
return data_dict
def to_hf_dataset(data_dict, video) -> Dataset:
features = {}
keys = [key for key in data_dict if "observation.images." in key]
for key in keys:
if video:
features[key] = VideoFrame()
else:
features[key] = Image()
features["observation.state"] = Sequence(
length=data_dict["observation.state"].shape[1], feature=Value(dtype="float32", id=None)
)
if "observation.velocity" in data_dict:
features["observation.velocity"] = Sequence(
length=data_dict["observation.velocity"].shape[1], feature=Value(dtype="float32", id=None)
)
if "observation.effort" in data_dict:
features["observation.effort"] = Sequence(
length=data_dict["observation.effort"].shape[1], feature=Value(dtype="float32", id=None)
)
features["action"] = Sequence(
length=data_dict["action"].shape[1], feature=Value(dtype="float32", id=None)
)
features["episode_index"] = Value(dtype="int64", id=None)
features["frame_index"] = Value(dtype="int64", id=None)
features["timestamp"] = Value(dtype="float32", id=None)
features["next.done"] = Value(dtype="bool", id=None)
features["index"] = Value(dtype="int64", id=None)
hf_dataset = Dataset.from_dict(data_dict, features=Features(features))
hf_dataset.set_transform(hf_transform_to_torch)
return hf_dataset
def from_raw_to_lerobot_format(
raw_dir: Path,
videos_dir: Path,
fps: int | None = None,
video: bool = True,
episodes: list[int] | None = None,
encoding: dict | None = None,
):
# sanity check
check_format(raw_dir)
if fps is None:
fps = 50
data_dict = load_from_raw(raw_dir, videos_dir, fps, video, episodes, encoding)
hf_dataset = to_hf_dataset(data_dict, video)
episode_data_index = calculate_episode_data_index(hf_dataset)
info = {
"codebase_version": CODEBASE_VERSION,
"fps": fps,
"video": video,
}
if video:
info["encoding"] = get_default_encoding()
return hf_dataset, episode_data_index, info
| lerobot/lerobot/common/datasets/push_dataset_to_hub/aloha_hdf5_format.py/0 | {
"file_path": "lerobot/lerobot/common/datasets/push_dataset_to_hub/aloha_hdf5_format.py",
"repo_id": "lerobot",
"token_count": 3851
} |
#!/usr/bin/env python
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import importlib
import gymnasium as gym
from lerobot.common.envs.configs import AlohaEnv, EnvConfig, PushtEnv, XarmEnv
def make_env_config(env_type: str, **kwargs) -> EnvConfig:
if env_type == "aloha":
return AlohaEnv(**kwargs)
elif env_type == "pusht":
return PushtEnv(**kwargs)
elif env_type == "xarm":
return XarmEnv(**kwargs)
else:
raise ValueError(f"Policy type '{env_type}' is not available.")
def make_env(cfg: EnvConfig, n_envs: int = 1, use_async_envs: bool = False) -> gym.vector.VectorEnv | None:
"""Makes a gym vector environment according to the config.
Args:
cfg (EnvConfig): the config of the environment to instantiate.
n_envs (int, optional): The number of parallelized env to return. Defaults to 1.
use_async_envs (bool, optional): Wether to return an AsyncVectorEnv or a SyncVectorEnv. Defaults to
False.
Raises:
ValueError: if n_envs < 1
ModuleNotFoundError: If the requested env package is not intalled
Returns:
gym.vector.VectorEnv: The parallelized gym.env instance.
"""
if n_envs < 1:
raise ValueError("`n_envs must be at least 1")
package_name = f"gym_{cfg.type}"
try:
importlib.import_module(package_name)
except ModuleNotFoundError as e:
print(f"{package_name} is not installed. Please install it with `pip install 'lerobot[{cfg.type}]'`")
raise e
gym_handle = f"{package_name}/{cfg.task}"
# batched version of the env that returns an observation of shape (b, c)
env_cls = gym.vector.AsyncVectorEnv if use_async_envs else gym.vector.SyncVectorEnv
env = env_cls(
[lambda: gym.make(gym_handle, disable_env_checker=True, **cfg.gym_kwargs) for _ in range(n_envs)]
)
return env
| lerobot/lerobot/common/envs/factory.py/0 | {
"file_path": "lerobot/lerobot/common/envs/factory.py",
"repo_id": "lerobot",
"token_count": 913
} |
import json
import pickle
from pathlib import Path
import torch
from lerobot.common.datasets.lerobot_dataset import LeRobotDatasetMetadata
from lerobot.common.policies.factory import make_policy
from lerobot.configs.policies import PreTrainedConfig
def display(tensor: torch.Tensor):
if tensor.dtype == torch.bool:
tensor = tensor.float()
print(f"Shape: {tensor.shape}")
print(f"Mean: {tensor.mean().item()}")
print(f"Std: {tensor.std().item()}")
print(f"Min: {tensor.min().item()}")
print(f"Max: {tensor.max().item()}")
def main():
num_motors = 14
device = "cuda"
# model_name = "pi0_aloha_towel"
model_name = "pi0_aloha_sim"
if model_name == "pi0_aloha_towel":
dataset_repo_id = "lerobot/aloha_static_towel"
else:
dataset_repo_id = "lerobot/aloha_sim_transfer_cube_human"
ckpt_torch_dir = Path.home() / f".cache/openpi/openpi-assets/checkpoints/{model_name}_pytorch"
ckpt_jax_dir = Path.home() / f".cache/openpi/openpi-assets/checkpoints/{model_name}"
save_dir = Path(f"../openpi/data/{model_name}/save")
with open(save_dir / "example.pkl", "rb") as f:
example = pickle.load(f)
with open(save_dir / "outputs.pkl", "rb") as f:
outputs = pickle.load(f)
with open(save_dir / "noise.pkl", "rb") as f:
noise = pickle.load(f)
with open(ckpt_jax_dir / "assets/norm_stats.json") as f:
norm_stats = json.load(f)
# Override stats
dataset_meta = LeRobotDatasetMetadata(dataset_repo_id)
dataset_meta.stats["observation.state"]["mean"] = torch.tensor(
norm_stats["norm_stats"]["state"]["mean"][:num_motors], dtype=torch.float32
)
dataset_meta.stats["observation.state"]["std"] = torch.tensor(
norm_stats["norm_stats"]["state"]["std"][:num_motors], dtype=torch.float32
)
# Create LeRobot batch from Jax
batch = {}
for cam_key, uint_chw_array in example["images"].items():
batch[f"observation.images.{cam_key}"] = torch.from_numpy(uint_chw_array) / 255.0
batch["observation.state"] = torch.from_numpy(example["state"])
batch["action"] = torch.from_numpy(outputs["actions"])
batch["task"] = example["prompt"]
if model_name == "pi0_aloha_towel":
del batch["observation.images.cam_low"]
elif model_name == "pi0_aloha_sim":
batch["observation.images.top"] = batch["observation.images.cam_high"]
del batch["observation.images.cam_high"]
# Batchify
for key in batch:
if isinstance(batch[key], torch.Tensor):
batch[key] = batch[key].unsqueeze(0)
elif isinstance(batch[key], str):
batch[key] = [batch[key]]
else:
raise ValueError(f"{key}, {batch[key]}")
# To device
for k in batch:
if isinstance(batch[k], torch.Tensor):
batch[k] = batch[k].to(device=device, dtype=torch.float32)
noise = torch.from_numpy(noise).to(device=device, dtype=torch.float32)
from lerobot.common import policies # noqa
cfg = PreTrainedConfig.from_pretrained(ckpt_torch_dir)
cfg.pretrained_path = ckpt_torch_dir
policy = make_policy(cfg, device, dataset_meta)
# loss_dict = policy.forward(batch, noise=noise, time=time_beta)
# loss_dict["loss"].backward()
# print("losses")
# display(loss_dict["losses_after_forward"])
# print("pi_losses")
# display(pi_losses)
actions = []
for _ in range(50):
action = policy.select_action(batch, noise=noise)
actions.append(action)
actions = torch.stack(actions, dim=1)
pi_actions = batch["action"]
print("actions")
display(actions)
print()
print("pi_actions")
display(pi_actions)
print("atol=3e-2", torch.allclose(actions, pi_actions, atol=3e-2))
print("atol=2e-2", torch.allclose(actions, pi_actions, atol=2e-2))
print("atol=1e-2", torch.allclose(actions, pi_actions, atol=1e-2))
if __name__ == "__main__":
main()
| lerobot/lerobot/common/policies/pi0/conversion_scripts/compare_with_jax.py/0 | {
"file_path": "lerobot/lerobot/common/policies/pi0/conversion_scripts/compare_with_jax.py",
"repo_id": "lerobot",
"token_count": 1746
} |
from typing import Protocol
import numpy as np
from lerobot.common.robot_devices.cameras.configs import (
CameraConfig,
IntelRealSenseCameraConfig,
OpenCVCameraConfig,
)
# Defines a camera type
class Camera(Protocol):
def connect(self): ...
def read(self, temporary_color: str | None = None) -> np.ndarray: ...
def async_read(self) -> np.ndarray: ...
def disconnect(self): ...
def make_cameras_from_configs(camera_configs: dict[str, CameraConfig]) -> list[Camera]:
cameras = {}
for key, cfg in camera_configs.items():
if cfg.type == "opencv":
from lerobot.common.robot_devices.cameras.opencv import OpenCVCamera
cameras[key] = OpenCVCamera(cfg)
elif cfg.type == "intelrealsense":
from lerobot.common.robot_devices.cameras.intelrealsense import IntelRealSenseCamera
cameras[key] = IntelRealSenseCamera(cfg)
else:
raise ValueError(f"The motor type '{cfg.type}' is not valid.")
return cameras
def make_camera(camera_type, **kwargs) -> Camera:
if camera_type == "opencv":
from lerobot.common.robot_devices.cameras.opencv import OpenCVCamera
config = OpenCVCameraConfig(**kwargs)
return OpenCVCamera(config)
elif camera_type == "intelrealsense":
from lerobot.common.robot_devices.cameras.intelrealsense import IntelRealSenseCamera
config = IntelRealSenseCameraConfig(**kwargs)
return IntelRealSenseCamera(config)
else:
raise ValueError(f"The camera type '{camera_type}' is not valid.")
| lerobot/lerobot/common/robot_devices/cameras/utils.py/0 | {
"file_path": "lerobot/lerobot/common/robot_devices/cameras/utils.py",
"repo_id": "lerobot",
"token_count": 626
} |
#!/usr/bin/env python
# Copyright 2024 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import importlib
import logging
def is_package_available(pkg_name: str, return_version: bool = False) -> tuple[bool, str] | bool:
"""Copied from https://github.com/huggingface/transformers/blob/main/src/transformers/utils/import_utils.py
Check if the package spec exists and grab its version to avoid importing a local directory.
**Note:** this doesn't work for all packages.
"""
package_exists = importlib.util.find_spec(pkg_name) is not None
package_version = "N/A"
if package_exists:
try:
# Primary method to get the package version
package_version = importlib.metadata.version(pkg_name)
except importlib.metadata.PackageNotFoundError:
# Fallback method: Only for "torch" and versions containing "dev"
if pkg_name == "torch":
try:
package = importlib.import_module(pkg_name)
temp_version = getattr(package, "__version__", "N/A")
# Check if the version contains "dev"
if "dev" in temp_version:
package_version = temp_version
package_exists = True
else:
package_exists = False
except ImportError:
# If the package can't be imported, it's not available
package_exists = False
else:
# For packages other than "torch", don't attempt the fallback and set as not available
package_exists = False
logging.debug(f"Detected {pkg_name} version: {package_version}")
if return_version:
return package_exists, package_version
else:
return package_exists
_torch_available, _torch_version = is_package_available("torch", return_version=True)
_gym_xarm_available = is_package_available("gym_xarm")
_gym_aloha_available = is_package_available("gym_aloha")
_gym_pusht_available = is_package_available("gym_pusht")
| lerobot/lerobot/common/utils/import_utils.py/0 | {
"file_path": "lerobot/lerobot/common/utils/import_utils.py",
"repo_id": "lerobot",
"token_count": 1045
} |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.