
Multi-GraspLLM: A Multimodal LLM for Multi-Hand Semantic-Guided Grasp Generation
Updates
- 2025.3: We add the Jaco hand data which is our final version.
- 2025.1: We add the Barrett hand data.
- 2024.12: Released the Multi-GraspSet dataset with meshes of objects.
- 2024.12: Released the Multi-GraspSet dataset with contact annotations.
Overview
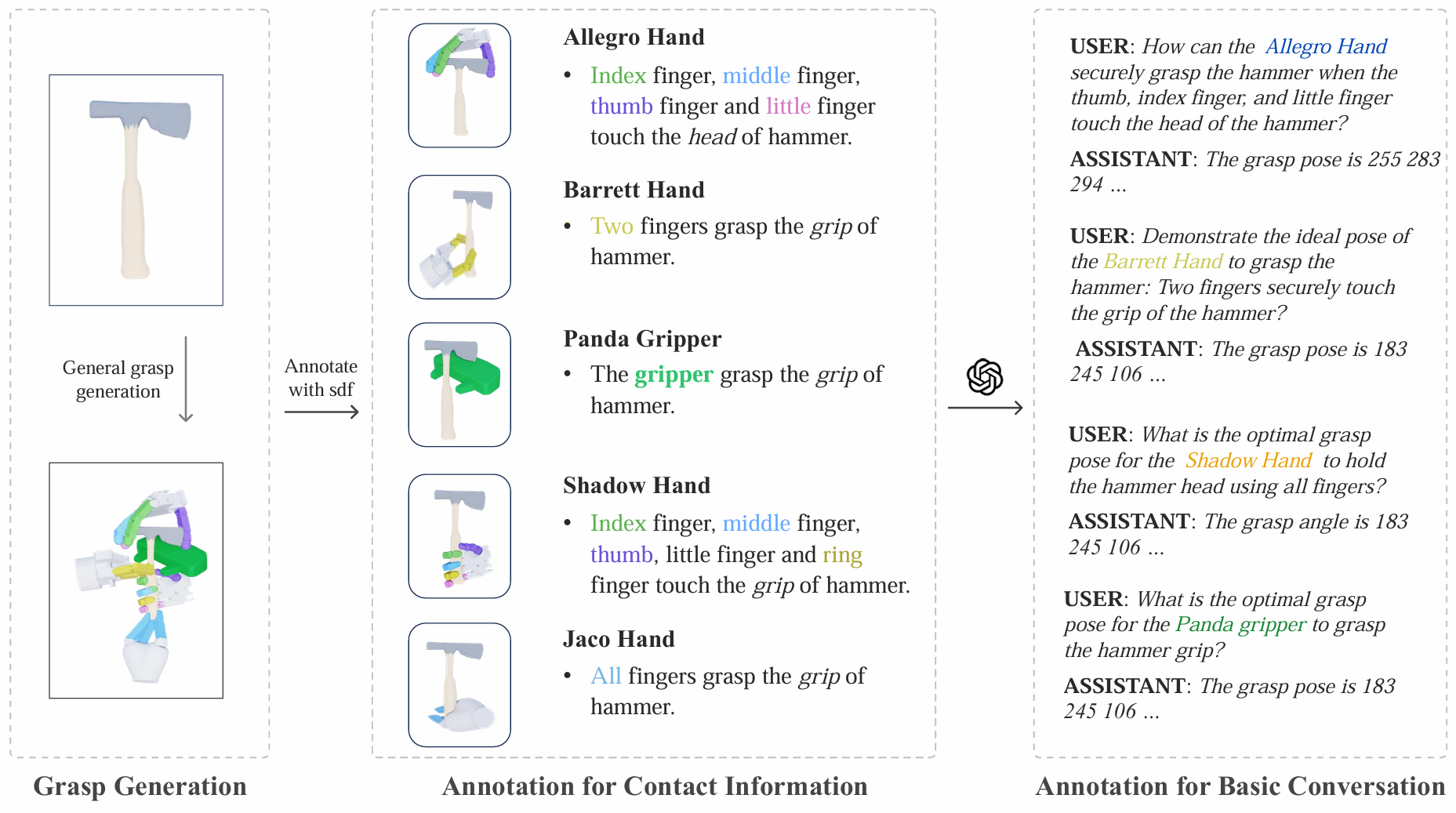
We introduce Multi-GraspSet, the first large-scale multi-hand grasp dataset enriched with automatic contact annotations.
|
|
The Construction process of Multi-GraspSet |
|
|
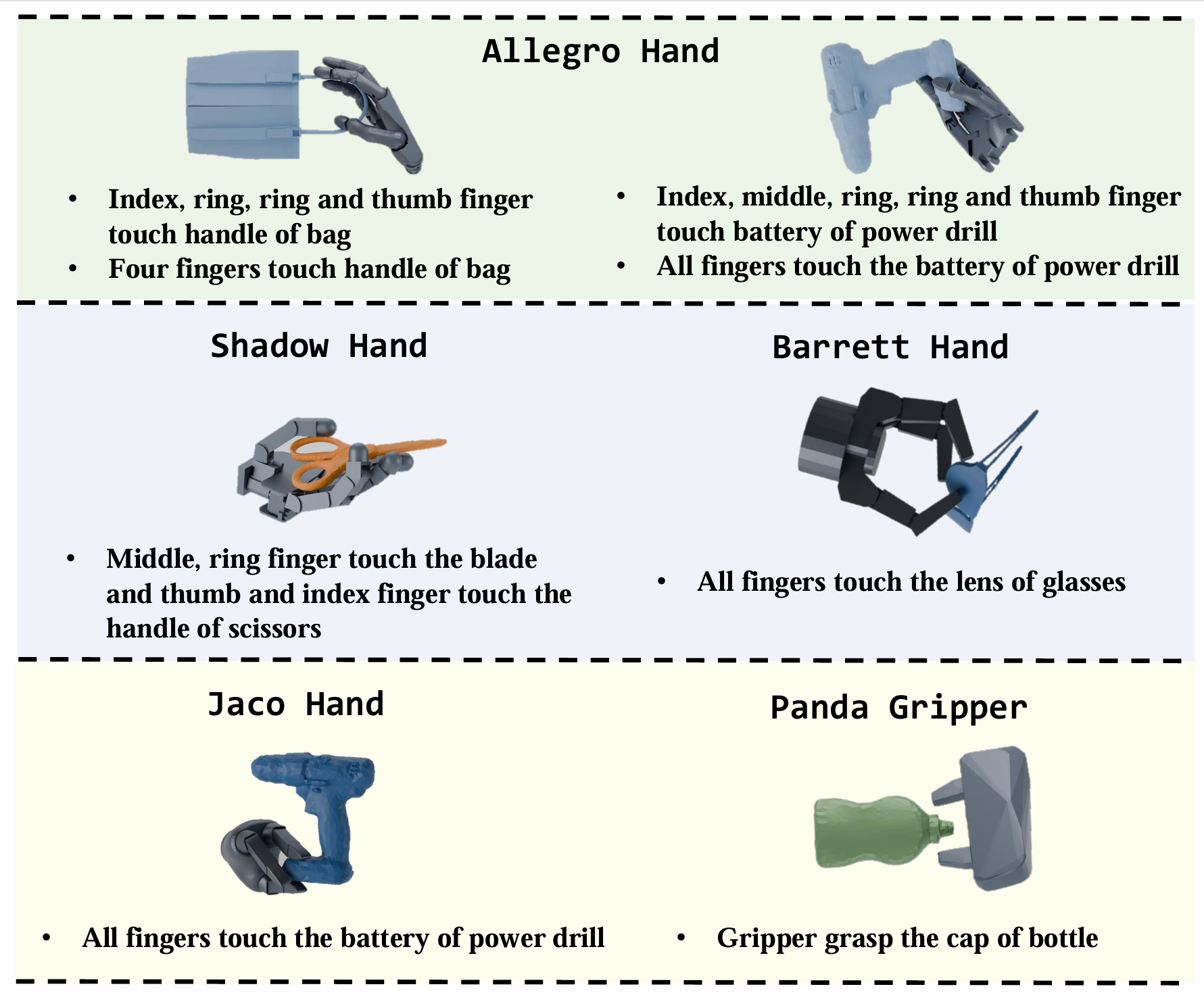
Visualization of Multi-GraspSet with contact annotations |
Installation
Follow these steps to set up the evaluation environment:
Create the Environment
conda create --name eval python=3.9Install PyTorch and Dependencies
pip install torch==2.0.1 torchvision==0.15.2 torchaudio==2.0.2⚠️ Ensure the CUDA toolkit version matches your installed PyTorch version.
Install Pytorch Kinematics
cd ./pytorch_kinematics pip install -e .Install Remaining Requirements
pip install -r requirements_eval.txt
Visualize the Dataset
Run the Visualization Code
Open and execute the
vis_mid_dataset.ipynbfile to visualize the dataset.