
File size: 11,570 Bytes
34d1f8b |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 |
# 坐标系
## 概述
MMDetection3D 使用 3 种不同的坐标系。3D 目标检测领域中不同坐标系的存在是非常有必要的,因为对于各种 3D 数据采集设备来说,如激光雷达、深度相机等,使用的坐标系是不一致的,不同的 3D 数据集也遵循不同的数据格式。早期的工作,比如 SECOND、VoteNet 将原始数据转换为另一种格式,形成了一些后续工作也遵循的约定,使得不同坐标系之间的转换变得更加复杂。
尽管数据集和采集设备多种多样,但是通过总结 3D 目标检测的工作线,我们可以将坐标系大致分为三类:
- 相机坐标系 -- 大多数相机的坐标系,在该坐标系中 y 轴正方向指向地面,x 轴正方向指向右侧,z 轴正方向指向前方。
```
上 z 前
| ^
| /
| /
| /
|/
左 ------ 0 ------> x 右
|
|
|
|
v
y 下
```
- 激光雷达坐标系 -- 众多激光雷达的坐标系,在该坐标系中 z 轴负方向指向地面,x 轴正方向指向前方,y 轴正方向指向左侧。
```
z 上 x 前
^ ^
| /
| /
| /
|/
y 左 <------ 0 ------ 右
```
- 深度坐标系 -- VoteNet、H3DNet 等模型使用的坐标系,在该坐标系中 z 轴负方向指向地面,x 轴正方向指向右侧,y 轴正方向指向前方。
```
z 上 y 前
^ ^
| /
| /
| /
|/
左 ------ 0 ------> x 右
```
该教程中的坐标系定义实际上**不仅仅是定义三个轴**。对于形如 $(x, y, z, dx, dy, dz, r)$ 的框来说,我们的坐标系也定义了如何解释框的尺寸 $(dx, dy, dz)$ 和转向角 (yaw) 角度 $r$。
三个坐标系的图示如下:
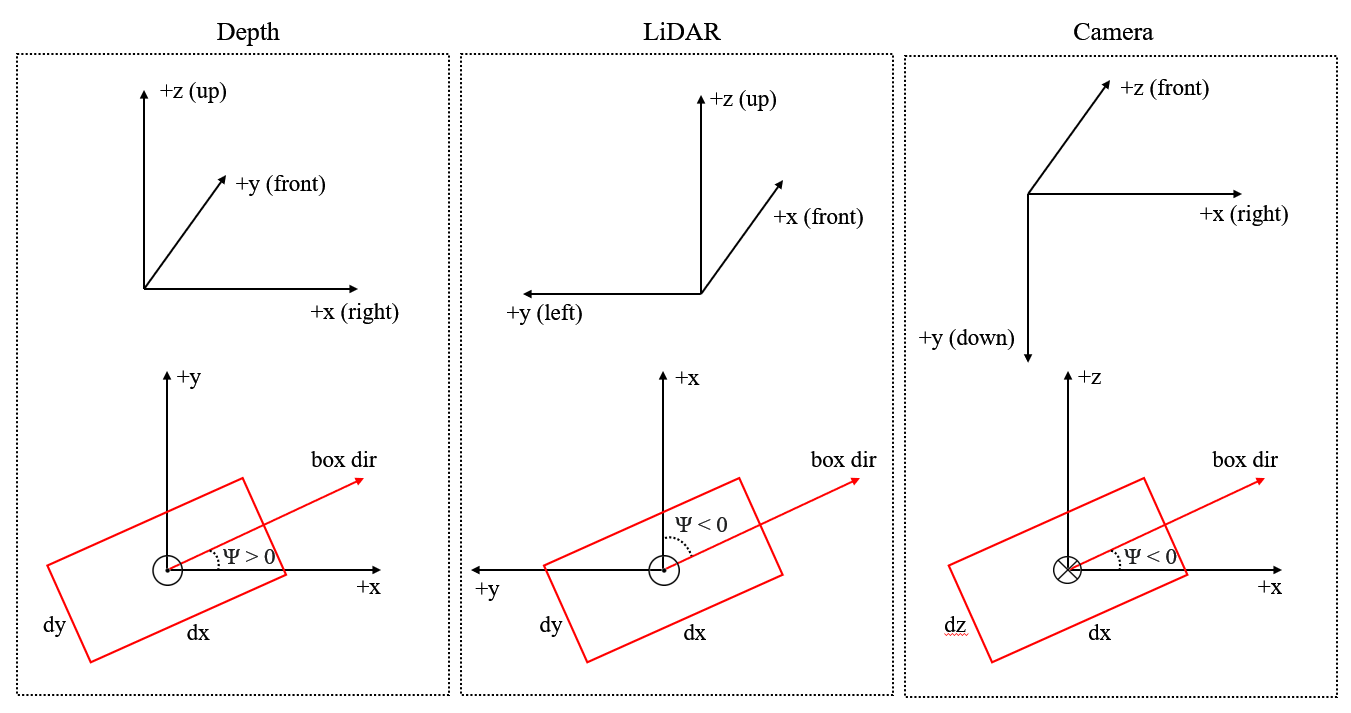
上面三张图是 3D 坐标系,下面三张图是鸟瞰图。
以后我们将坚持使用本教程中定义的三个坐标系。
## 转向角 (yaw) 的定义
请参考[维基百科](https://en.wikipedia.org/wiki/Euler_angles#Tait%E2%80%93Bryan_angles)了解转向角的标准定义。在目标检测中,我们选择一个轴作为重力轴,并在垂直于重力轴的平面 $\\Pi$ 上选取一个参考方向,那么参考方向的转向角为 0,在 $\\Pi$ 上的其他方向有非零的转向角,其角度取决于其与参考方向的角度。
目前,对于所有支持的数据集,标注不包括俯仰角 (pitch) 和滚动角 (roll),这意味着我们在预测框和计算框之间的重叠时只需考虑转向角 (yaw)。
在 MMDetection3D 中,所有坐标系都是右手坐标系,这意味着如果从重力轴的负方向(轴的正方向指向人眼)看,转向角 (yaw) 沿着逆时针方向增加。
下图显示,在右手坐标系中,如果我们设定 x 轴正方向为参考方向,那么 y 轴正方向的转向角 (yaw) 为 $\\frac{\\pi}{2}$。
```
z 上 y 前 (yaw=0.5*pi)
^ ^
| /
| /
| /
|/
左 (yaw=pi) ------ 0 ------> x 右 (yaw=0)
```
对于一个框来说,其转向角 (yaw) 的值等于其方向减去一个参考方向。在 MMDetection3D 的所有三个坐标系中,参考方向总是 x 轴的正方向,而如果一个框的转向角 (yaw) 为 0,则其方向被定义为与 x 轴平行。框的转向角 (yaw) 的定义如下图所示。
```
y 前
^ 框的方向 (yaw=0.5*pi)
/|\ ^
| /|\
| ____|____
| | | |
| | | |
__|____|____|____|______\ x 右
| | | | /
| | | |
| |____|____|
|
```
## 框尺寸的定义
框尺寸的定义与转向角 (yaw) 的定义是分不开的。在上一节中,我们提到如果一个框的转向角 (yaw) 为 0,它的方向就被定义为与 x 轴平行。那么自然地,一个框对应于 x 轴的尺寸应该是 $dx$。但是,这在某些数据集中并非总是如此(我们稍后会解决这个问题)。
下图展示了 x 轴和 $dx$,y 轴和 $dy$ 对应的含义。
```
y 前
^ 框的方向 (yaw=0.5*pi)
/|\ ^
| /|\
| ____|____
| | | |
| | | | dx
__|____|____|____|______\ x 右
| | | | /
| | | |
| |____|____|
| dy
```
注意框的方向总是和 $dx$ 边平行。
```
y 前
^ _________
/|\ | | |
| | | |
| | | | dy
| |____|____|____\ 框的方向 (yaw=0)
| | | | /
__|____|____|____|_________\ x 右
| | | | /
| |____|____|
| dx
|
```
## 与支持的数据集的原始坐标系的关系
### KITTI
KITTI 数据集的原始标注是在相机坐标系下的,详见 [get_label_anno](https://github.com/open-mmlab/mmdetection3d/blob/master/tools/data_converter/kitti_data_utils.py)。在 MMDetection3D 中,为了在 KITTI 数据集上训练基于激光雷达的模型,首先将数据从相机坐标系转换到激光雷达坐标,详见 [get_ann_info](https://github.com/open-mmlab/mmdetection3d/blob/master/mmdet3d/datasets/kitti_dataset.py)。对于训练基于视觉的模型,数据保持在相机坐标系不变。
在 SECOND 中,框的激光雷达坐标系定义如下(鸟瞰图):
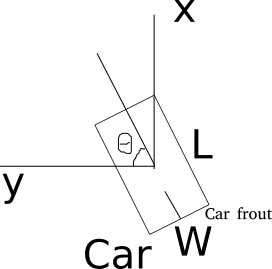
对于每个框来说,尺寸为 $(w, l, h)$,转向角 (yaw) 的参考方向为 y 轴正方向。更多细节请参考[代码库](https://github.com/traveller59/second.pytorch#concepts)。
我们的激光雷达坐标系有两处改变:
- 转向角 (yaw) 被定义为右手而非左手,从而保持一致性;
- 框的尺寸为 $(l, w, h)$ 而非 $(w, l, h)$,由于在 KITTI 数据集中 $w$ 对应 $dy$,$l$ 对应 $dx$。
### Waymo
我们使用 Waymo 数据集的 KITTI 格式数据。因此,在我们的实现中 KITTI 和 Waymo 也共用相同的坐标系。
### NuScenes
NuScenes 提供了一个评估工具包,其中每个框都被包装成一个 `Box` 实例。`Box` 的坐标系不同于我们的激光雷达坐标系,在 `Box` 坐标系中,前两个表示框尺寸的元素分别对应 $(dy, dx)$ 或者 $(w, l)$,和我们的表示方法相反。更多细节请参考 NuScenes [教程](https://github.com/open-mmlab/mmdetection3d/blob/master/docs/zh_cn/datasets/nuscenes_det.md#notes)。
读者可以参考 [NuScenes 开发工具](https://github.com/nutonomy/nuscenes-devkit/tree/master/python-sdk/nuscenes/eval/detection),了解 [NuScenes 框](https://github.com/nutonomy/nuscenes-devkit/blob/2c6a752319f23910d5f55cc995abc547a9e54142/python-sdk/nuscenes/utils/data_classes.py#L457) 的定义和 [NuScenes 评估](https://github.com/nutonomy/nuscenes-devkit/blob/master/python-sdk/nuscenes/eval/detection/evaluate.py)的过程。
### Lyft
就涉及坐标系而言,Lyft 和 NuScenes 共用相同的数据格式。
请参考[官方网站](https://www.kaggle.com/c/3d-object-detection-for-autonomous-vehicles/data)获取更多信息。
### ScanNet
ScanNet 的原始数据不是点云而是网格,需要在我们的深度坐标系下进行采样得到点云数据。对于 ScanNet 检测任务,框的标注是轴对齐的,并且转向角 (yaw) 始终是 0。因此,我们的深度坐标系中转向角 (yaw) 的方向对 ScanNet 没有影响。
### SUN RGB-D
SUN RGB-D 的原始数据不是点云而是 RGB-D 图像。我们通过反投影,可以得到每张图像对应的点云,其在我们的深度坐标系下。但是,数据集的标注并不在我们的系统中,所以需要进行转换。
将原始标注转换为我们的深度坐标系下的标注的转换过程请参考 [sunrgbd_data_utils.py](https://github.com/open-mmlab/mmdetection3d/blob/master/tools/data_converter/sunrgbd_data_utils.py)。
### S3DIS
在我们的实现中,S3DIS 与 ScanNet 共用相同的坐标系。然而 S3DIS 是一个仅限于分割任务的数据集,因此没有标注是坐标系敏感的。
## 例子
### 框(在不同坐标系间)的转换
以相机坐标系和激光雷达坐标系间的转换为例:
首先,对于点和框的中心点,坐标转换前后满足下列关系:
- $x\_{LiDAR}=z\_{camera}$
- $y\_{LiDAR}=-x\_{camera}$
- $z\_{LiDAR}=-y\_{camera}$
然后,框的尺寸转换前后满足下列关系:
- $dx\_{LiDAR}=dx\_{camera}$
- $dy\_{LiDAR}=dz\_{camera}$
- $dz\_{LiDAR}=dy\_{camera}$
最后,转向角 (yaw) 也应该被转换:
- $r\_{LiDAR}=-\\frac{\\pi}{2}-r\_{camera}$
详见[此处](https://github.com/open-mmlab/mmdetection3d/blob/master/mmdet3d/core/bbox/structures/box_3d_mode.py)代码了解更多细节。
### 鸟瞰图
如果 3D 框是 $(x, y, z, dx, dy, dz, r)$,相机坐标系下框的鸟瞰图是 $(x, z, dx, dz, -r)$。转向角 (yaw) 符号取反是因为相机坐标系重力轴的正方向指向地面。
详见[此处](https://github.com/open-mmlab/mmdetection3d/blob/master/mmdet3d/core/bbox/structures/cam_box3d.py)代码了解更多细节。
### 框的旋转
我们将各种框的旋转设定为绕着重力轴逆时针旋转。因此,为了旋转一个 3D 框,我们首先需要计算新的框的中心,然后将旋转角度添加到转向角 (yaw)。
详见[此处](https://github.com/open-mmlab/mmdetection3d/blob/master/mmdet3d/core/bbox/structures/cam_box3d.py)代码了解更多细节。
## 常见问题
#### Q1: 与框相关的算子是否适用于所有坐标系类型?
否。例如,[用于 RoI-Aware Pooling 的算子](https://github.com/open-mmlab/mmcv/blob/master/mmcv/ops/roiaware_pool3d.py)只适用于深度坐标系和激光雷达坐标系下的框。由于如果从上方看,旋转是顺时针的,所以 KITTI 数据集[这里](https://github.com/open-mmlab/mmdetection3d/blob/master/mmdet3d/core/evaluation/kitti_utils.py)的评估函数仅适用于相机坐标系下的框。
对于每个和框相关的算子,我们注明了其所适用的框类型。
#### Q2: 在每个坐标系中,三个轴是否分别准确地指向右侧、前方和地面?
否。例如在 KITTI 中,从相机坐标系转换为激光雷达坐标系时,我们需要一个校准矩阵。
#### Q3: 框中转向角 (yaw) $2\\pi$ 的相位差如何影响评估?
对于交并比 (IoU) 计算,转向角 (yaw) 有 $2\\pi$ 的相位差的两个框是相同的,所以不会影响评估。
对于角度预测评估,例如 NuScenes 中的 NDS 指标和 KITTI 中的 AOS 指标,会先对预测框的角度进行标准化,因此 $2\\pi$ 的相位差不会改变结果。
#### Q4: 框中转向角 (yaw) $\\pi$ 的相位差如何影响评估?
对于交并比 (IoU) 计算,转向角 (yaw) 有 $\\pi$ 的相位差的两个框是相同的,所以不会影响评估。
然而,对于角度预测评估,这会导致完全相反的方向。
考虑一辆汽车,转向角 (yaw) 是汽车前部方向与 x 轴正方向之间的夹角。如果我们将该角度增加 $\\pi$,车前部将变成车后部。
对于某些类别,例如障碍物,前后没有区别,因此 $\\pi$ 的相位差不会对角度预测分数产生影响。
|