---
license: mit
---
# BricksRL Dataset Card
## Dataset Summary
The BricksRL dataset contains curated data for three robotic configurations: 2Wheeler, Walker, and RoboArm. The dataset includes expert and random data for four key tasks: Walker-v0, RoboArm-v0, RunAway-v0, and Spinning-v0. The expert data was collected using a trained Soft Actor-Critic (SAC) agent, while the random data was generated by executing a random policy. This dataset is presented in the paper [BricksRL: A Platform for Democratizing Robotics and Reinforcement Learning Research and Education with LEGO](https://arxiv.org/abs/2406.17490) (NeurIPS 2024).
For more information feel free to check out the project [website](https://bricksrl.github.io/ProjectPage/).
## Supported Tasks
The dataset supports the following tasks across various robot configurations:
- Walker-v0
- RoboArm-v0
- RunAway-v0
- Spinning-v0
## Dataset Structure
The dataset contains two types of data:
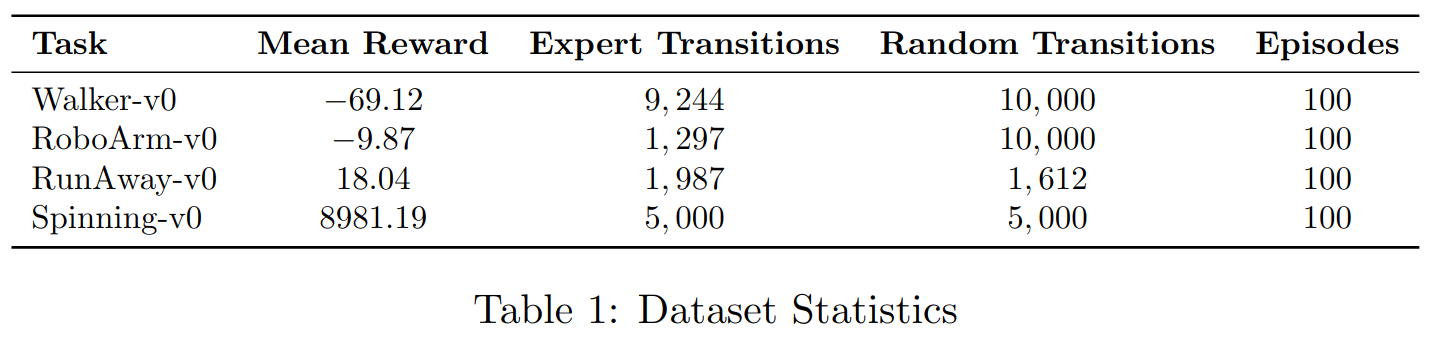
- Expert Data: Collected by a trained SAC agent solving the tasks on the real robot. The agent was evaluated over 100 episodes for each task, recording all transitions.
- Random Data: Generated by executing a random policy on the real robot for 100 episodes per task.
The datasets are TensorDicts, which can be directly loaded into the replay buffer. When initiating (pre-)training, provide the path to the desired TensorDict when prompted to load the replay buffer.
Table 1 shows the dataset statistics regarding mean reward (expert data), number of transitions collected, and collection episodes.
## Results and Evaluation
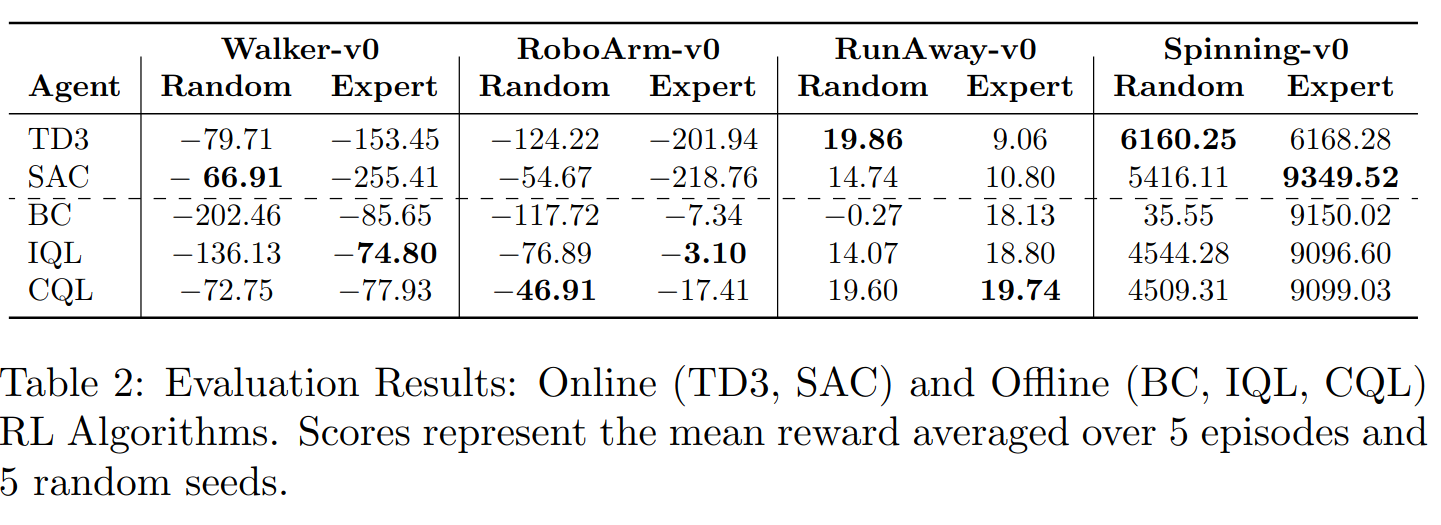
The dataset was used to train both online and offline RL algorithms (Table 2). Performance comparisons between these methods demonstrated the effectiveness of offline RL algorithms, particularly when using expert data. Online RL algorithms struggled to generalize or often overfit when provided with expert demonstrations. For more detailed information about the hyperparameters, please refer to the appendix of the [paper](https://arxiv.org/abs/2406.17490).
## Citation
If you use the BricksRL dataset in your research, please cite the following paper:
```
@article{dittert2024bricksrl,
title={BricksRL: A Platform for Democratizing Robotics and Reinforcement Learning Research and Education with LEGO},
author={Sebastian Dittert and Vincent Moens and Gianni De Fabritiis},
journal={arXiv preprint arXiv:2406.17490},
year={2024}
}
```